nvidia系列教程-AGX-Orin基础环境搭建
目录
前言
一、Agx-Orin(32GB)介绍
1.1 GPU
1.2 CPU
1.3 NVDLA
1.4 内存
1.5 存储
二、安装JetPack SDK
三、基础环境配置
四、jetpack软件版本
总结
前言
NVIDIA Jetson AGX Orin 是一款功能强大的嵌入式AI平台,专为需要高性能和低功耗的边缘计算应用设计。无论是自动驾驶、机器人,还是智能监控系统,Jetson AGX Orin 都能为这些应用提供强大的计算能力。本篇博客将为大家详细介绍如何在AGX Orin(32GB)上搭建基础开发环境,包括系统安装、CUDA和cuDNN的配置等,帮助你快速上手这个强大的平台。
一、Agx-Orin(32GB)介绍
1.1 GPU
- 架构: 搭载 56 个 Tensor Core 的 1792 核 NVIDIA Ampere c GPU
- CUDA Cores: 2048 个
- Tensor Cores: 64 个
- GPU频率: 高达1.3 GHz
Jetson AGX Orin 搭载的GPU基于NVIDIA的Ampere架构,支持CUDA并行计算和Tensor Core加速,能够提供出色的AI推理性能,尤其在深度学习应用中表现出色。
1.2 CPU
- 架构: 8 核 Arm® Cortex®-A78AE v8.2 64 位 CPU 2MB L2 + 4MB L3
- 核心频率: 高达2.2 GHz
Jetson AGX Orin 的CPU由12个高性能的ARM Cortex-A78AE核心组成,提供了强大的计算能力,适合并行计算和多任务处理。
1.3 NVDLA(NVIDIA Deep Learning Accelerator)
- NVDLA的AI算力: 200 TOPS
NVDLA是一种专用的深度学习加速器,能够处理卷积神经网络中的推理任务,并减少CPU和GPU的负载,从而提高整体系统性能和能效。
1.4 内存
- 内存类型: 32GB LPDDR5
- 内存带宽: 205GB/s
Jetson AGX Orin 配备了大容量的LPDDR5内存,提供了高达205GB/s的带宽,支持复杂的AI模型和数据处理任务。
1.5 存储
- eMMC: 64GB
- 可扩展存储: 支持外接NVMe SSD或SD卡
Jetson AGX Orin 内置64GB的eMMC存储,并支持通过NVMe SSD和SD卡扩展存储空间,以满足不同应用的存储需求。
二、安装JetPack SDK
Jetson AGX Orin 内置64GB的eMMC存储,并支持通过NVMe SSD和SD卡扩展存储空间,以满足不同应用的存储需求。
JetPack SDK是NVIDIA为Jetson平台提供的一套完整的软件开发工具包,包含了操作系统镜像、CUDA、cuDNN、TensorRT等。可以通过NVIDIA的官方网站下载JetPack SDK。
- 前往NVIDIA官方网站:SDK Manager | NVIDIA Developer

- 选择与你的Jetson设备兼容的JetPack版本,并下载SDK Manager。
下载完成得到sdkmanager_2.1.0-11682_amd64.deb安装包,并使用以下命令安装deb包:
cftc@cftc-virtual-machine:~/nvidia$
cftc@cftc-virtual-machine:~/nvidia$ ls
nvidia_sdk sdkmanager_2.1.0-11682_amd64.deb source
cftc@cftc-virtual-machine:~/nvidia$
cftc@cftc-virtual-machine:~/nvidia$
cftc@cftc-virtual-machine:~/nvidia$ sudo apt install ./sdkmanager_2.1.0-11682_amd64.deb
4、安装完成运行sdkmanager启动刷机软件


5、长按模块recovery按键1~3秒,上电,虚拟机自动检测到AGX-Orin otg设备:

6、配置选择,选择jetson设备,取消勾选host machine(避免安装到本机),target hardware选择jetson agx orin设备,勾选jetpack 5.1.3 SDK包、deepstream包,如下所示:

然后点击continue继续。
7、勾选各个组件,选择下载目录,勾选accept,点击continue继续。

8、开始自动下载sdk以及各个组件包,下载完成自动完成编译并刷机到AGX-Orin设备,整个操作将一键自动化完成。
下载包如下所示:
cftc@cftc-virtual-machine:~/Downloads/nvidia/sdkm_downloads$ pwd
/home/cftc/Downloads/nvidia/sdkm_downloads
cftc@cftc-virtual-machine:~/Downloads/nvidia/sdkm_downloads$
cftc@cftc-virtual-machine:~/Downloads/nvidia/sdkm_downloads$ ls
cuda-repo-cross-aarch64-ubuntu2004-11-4-local_11.4.19-1_all.deb nvidia-container-runtime_3.9.0-1_all.deb Tegra_Linux_Sample-Root-Filesystem_R35.5.0_aarch64.tbz2
cuda-repo-l4t-11-4-local_11.4.19-1_arm64.deb nvidia-container-toolkit_1.11.0_rc.1-1_arm64.deb Tegra_Linux_Sample-Root-Filesystem_R36.3.0_aarch64.tbz2.mtd
cuda-repo-ubuntu2004-11-4-local_11.4.19-470.154-1_amd64.deb nvidia-docker2_2.11.0-1_all.deb userFeedbackData.json
cudnn-local-tegra-repo-ubuntu2004-8.6.0.166_1.0-1_arm64.deb nvidia-l4t-jetson-multimedia-api_35.5.0-20240219203809_arm64.deb vpi-cross-aarch64-l4t-2.4.8-cuda11-x86_64-linux.deb
cupva-2.3.0-l4t.deb NVIDIA_Nsight_Graphics_L4T_Public_2023.2.23187_arm64.deb vpi-demos-2.4.8-aarch64-l4t.deb
cupva-2.5.1-l4t.deb.mtd NVIDIA_Nsight_Graphics_L4T_Public_2023.2.23187_x64.deb vpi-demos-2.4.8-cuda11-x86_64-linux-ubuntu2004.deb
deepstream-6.3_6.3.0-1_arm64.deb NVIDIA_Nsight_Perf_SDK_2023.3.1.tar.gz vpi-dev-2.4.8-aarch64-l4t.deb
hwdata NVIDIA_Nsight_Perf_SDK_Docs_2023.3.1.zip vpi-dev-2.4.8-cuda11-x86_64-linux.deb
Jetson_Linux_R35.5.0_aarch64.tbz2 nvsci_1.0_x86_64.deb vpi-lib-2.4.8-aarch64-l4t.deb
Jetson_Linux_R36.3.0_aarch64.tbz2.mtd nv-tensorrt-local-repo-l4t-8.5.2-cuda-11.4_1.0-1_arm64.deb vpi-lib-2.4.8-cuda11-x86_64-linux.deb
libnvidia-container0_0.11.0+jetpack_arm64.deb OpenCV-4.5.4-8-g3e4c170df4-aarch64-dev.deb vpi-python3.8-2.4.8-aarch64-l4t.deb
libnvidia-container1_1.10.0-1_arm64.deb OpenCV-4.5.4-8-g3e4c170df4-aarch64-libs.deb vpi-python3.8-2.4.8-cuda11-x86_64-linux.deb
libnvidia-container-tools_1.10.0-1_arm64.deb OpenCV-4.5.4-8-g3e4c170df4-aarch64-licenses.deb vpi-python3.9-2.4.8-aarch64-l4t.deb
nsight-compute-2022.2.1_2022.2.1.6-1_amd64.deb OpenCV-4.5.4-8-g3e4c170df4-aarch64-python.deb vpi-python3.9-2.4.8-cuda11-x86_64-linux.deb
nsight-compute-2022.2.1_2022.2.1.6-1_arm64.deb OpenCV-4.5.4-8-g3e4c170df4-aarch64-samples.deb vpi-samples-2.4.8-aarch64-l4t.deb
nsight-compute-addon-l4t-2022.2.1_2022.2.1.6-1_all.deb OpenCV-4.8.0-1-g6371ee1-aarch64-libs.deb.mtd vpi-samples-2.4.8-cuda11-x86_64-linux.deb
nsight-systems-2023.2.4.44-3301185-1_tegra_arm64.deb sdkml3_deepstream_63.json
NsightSystems-linux-public-2023.2.4.44-3301185.deb sdkml3_jetpack_513.json
sdk包路径如下所示:

刷写完成后,设备会自动重启,进入Jetson AGX Orin的Ubuntu系统。
三、基础环境配置

四、jetpack软件版本
CUDA版本:

cudnn软件版本:

opencv软件版本:

tensorRT软件版本:

总结
通过本篇文章,你已经完成了Jetson AGX Orin的基础环境搭建,包括系统安装、CUDA与cuDNN的配置等。接下来,你可以开始在这个强大的平台上开发你的AI应用了。下一篇详细介绍使用命令方式进行刷机操作。
相关文章:
nvidia系列教程-AGX-Orin基础环境搭建
目录 前言 一、Agx-Orin(32GB)介绍 1.1 GPU 1.2 CPU 1.3 NVDLA 1.4 内存 1.5 存储 二、安装JetPack SDK 三、基础环境配置 四、jetpack软件版本 总结 前言 NVIDIA Jetson AGX Orin 是一款功能强大的嵌入式AI平台,专为需要高性能和低…...

使用SpringAOP实现公共字段填充
文章目录 概要整体架构流程技术细节小结 概要 在新增员工或者新增菜品分类时需要设置创建时间、创建人、修改时间、修改人等字段,在编辑员工或者编辑菜品分类时需要设置修改时间、修改人等字段。这些字段属于公共字段,也就是也就是在我们的系统中很多表…...

c++初阶-----适配器---priority_queue
作者前言 🎂 ✨✨✨✨✨✨🍧🍧🍧🍧🍧🍧🍧🎂 🎂 作者介绍: 🎂🎂 🎂 🎉🎉🎉…...

VSCode上安装C#环境教程
本章教程,教你如何在vscode上,可以快速运行一些基础的c#代码。 1、下载 .NET Code SDK 下载地址:https://dotnet.microsoft.com/zh-cn/download/dotnet/sdk-for-vs-code?utm_source=vs-code&utm_medium=referral&utm_campaign=sdk-install 根据自己的操作系统,选择…...

VS Code 和 Visual Studio 哪个更好
文章目录 VS Code 和 Visual Studio 哪个更好Visual Studio Code简介Visual Studio简介相同点差异点总结 VS Code 和 Visual Studio 哪个更好 Visual Studio Code简介 Visual Studio Code(简称 VS Code)是一款开源的、免费的、跨平台的、轻量级的代码编…...

FCA-数据分析理论试卷
其他参考: https://segmentfault.com/a/1190000043363073 https://blog.csdn.net/CSDN_WYY/article/details/137082340 Part.1:判断题(总分:8分 得分:8) 第1题 判断题 对任意事件A和B,必有 …...

WPF程序通过CadLib4加载CAD .dwg格式文件
1、下载CadLib相关dll文件,主要用到的:WW.dll、WW.Cad.dll、WW.GL.dll 2、程序中引用dll库。 3、创建WPF程序,使用Canvas来加载dwg文件,支持拖动和放大缩小。 4、部分代码: public void Init(string filename) {tr…...

图表全能王(ChartStudio) 上架VisionPro!
图表全能王(ChartStudio) - 终极图表制作工具!支持条形图、折线图、面积图、柱形图、条形图、饼图、玫瑰图、雷达图、牛肉图、风琴图、旭日图、桑基图等图表。 https://apps.apple.com/app/chartstudio-data-analysis/id6474099675 https://apps.apple.com/cn/app/…...

【云原生】Job一次性任务详解
Job一次性任务 文章目录 Job一次性任务一、Job介绍二、运行示例Job 一、Job介绍 Job会创建一个或者多个Pod,并将继续重试Pod的执行,直到指定数量的Pod成功终止。随着Pod成功借宿,Job跟踪记录成功完成的Pod个数。当数量达到指定的成功个数阈值…...

化工厂人员定位采用多种定位技术的融合定位系统的好处
由于化工厂内环境的复杂性和危险性,通常单一的定位技术很难满足全厂区的人员定位需求,如果能将不同定位技术融合在一起,发挥出它们各自的优势,那么就能解决以上问题。 融合定位技术诞生背景 随着科技的不断发展,多种定…...

使用AI绘图工具生成风景图像的教程
随着人工智能技术的飞速发展,AI绘图工具在图像生成和艺术创作方面变得越来越强大,无论你是一个设计师、艺术家,还是仅仅对生成艺术感兴趣的爱好者,AI绘图工具都可以帮助你轻松地创作出惊艳的风景图像。 在这篇教程中,…...

迷你主机:华硕PN65和nuc13pro如何选择?
华硕PN65与NUC 13 Pro:如何做出选择? 在追求高效能与便携性的今天,迷你主机成为了越来越多用户的选择。华硕PN65与英特尔NUC 13 Pro作为市场上两款备受瞩目的产品,各自拥有独特的优势和特点。本文将从处理器性能、扩展性、接口丰…...
分享一个好用的印花重绘工具
本文向大家介绍一款革命性的 AI 工具,它能够将模糊不清的图片转化为具有照片级别的高清图像。这项前沿项目依托于大规模人工智能技术,革新了图像恢复领域。通过文本驱动和智能修复功能,它巧妙地结合了先进的 AI 技术与创新理念,为…...
)
力扣题解(递增的三元子序列)
334. 递增的三元子序列 给你一个整数数组 nums ,判断这个数组中是否存在长度为 3 的递增子序列。 如果存在这样的三元组下标 (i, j, k) 且满足 i < j < k ,使得 nums[i] < nums[j] < nums[k] ,返回 true ;否则&#…...

做不好PPT的原因
新手制作PPT长犯的10个错误 1.Word搬家 为了节约时间,直接把Word素材复制粘贴到PPT上,没有提炼 2.堆积图表 每个页面上堆积了大量的图表,却没有说明数据反映了什么趋势 3.图表业余 想用图表达自己的逻辑,但没有专业的模板&a…...

嵌入式人工智能(45-基于树莓派4B的扩展板-舵机驱动板PCA9685)
1、简介 智能小车、机械臂、摄像头云台会有多个舵机,而微控制器芯片的PWM输出引脚不够的情况下,就可以用PCA9685(16路舵机)来解决这一问题。 PCA9685是一款I2C总线控制的16通道LED控制器,专为红/绿/蓝/琥珀ÿ…...

【数据结构与算法】建立多个栈的三种方案的优缺点分析
在一个算法中需要建立多个栈时可以选用以下三种方案之一,试问这三方案相比各有什么优缺点? (1)分别用多个顺序存储空间建立多个独立的顺序栈。 (2)多个栈共享一个顺序存储空间。 (3)…...

DjangoRF-14-创建request子应用
注意,本应该是requests模块,为了区分,避免错误,用request 1、进入apps,创建request django-admin startapp request 2、因为只发送请求,没有数据库相关,不需要model。 3、进行序列化 from rest_framework …...

SOMEIP_ETS_005:检查字节序
测试目的: 验证DUT在发送和接收参数时对字节序的处理能力。 描述 本测试用例旨在检验DUT在处理具有不同字节序的参数时,是否能够正确地发送和接收数据,并确保返回的UINT32值是传入的两个参数(UINT8和UINT16)的和。 …...

为什么要对医疗器械进行网络安全评估?
对医疗器械进行网络安全评估的原因主要有以下几点: 一、保障患者安全 直接关联患者健康:医疗器械与患者的生命健康直接相关,任何网络安全漏洞都可能导致设备被非法控制或数据泄露,进而威胁患者的生命安全。例如,黑客可…...
docker详细操作--未完待续
docker介绍 docker官网: Docker:加速容器应用程序开发 harbor官网:Harbor - Harbor 中文 使用docker加速器: Docker镜像极速下载服务 - 毫秒镜像 是什么 Docker 是一种开源的容器化平台,用于将应用程序及其依赖项(如库、运行时环…...
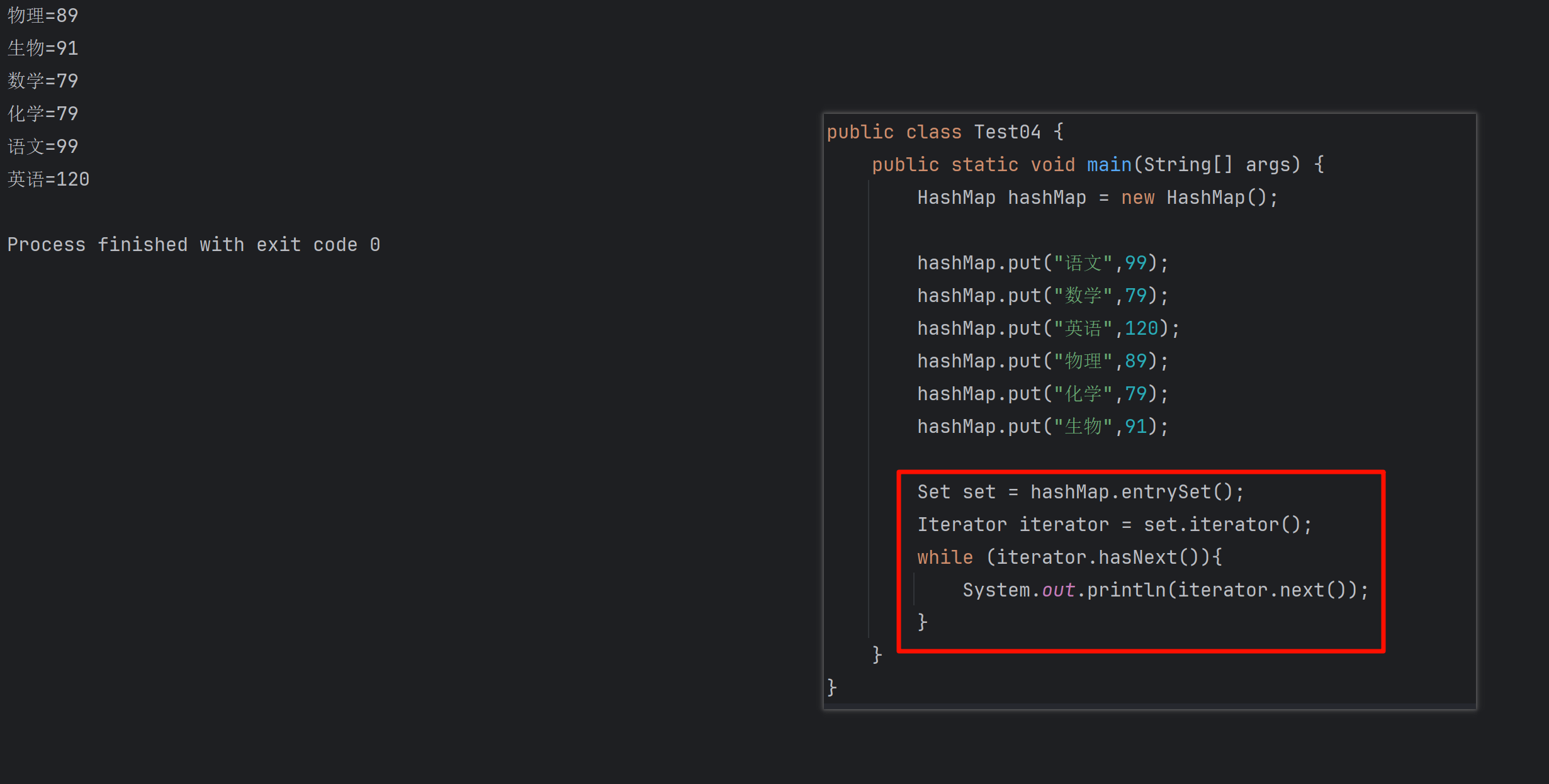
遍历 Map 类型集合的方法汇总
1 方法一 先用方法 keySet() 获取集合中的所有键。再通过 gey(key) 方法用对应键获取值 import java.util.HashMap; import java.util.Set;public class Test {public static void main(String[] args) {HashMap hashMap new HashMap();hashMap.put("语文",99);has…...

mongodb源码分析session执行handleRequest命令find过程
mongo/transport/service_state_machine.cpp已经分析startSession创建ASIOSession过程,并且验证connection是否超过限制ASIOSession和connection是循环接受客户端命令,把数据流转换成Message,状态转变流程是:State::Created 》 St…...

第25节 Node.js 断言测试
Node.js的assert模块主要用于编写程序的单元测试时使用,通过断言可以提早发现和排查出错误。 稳定性: 5 - 锁定 这个模块可用于应用的单元测试,通过 require(assert) 可以使用这个模块。 assert.fail(actual, expected, message, operator) 使用参数…...
Mac软件卸载指南,简单易懂!
刚和Adobe分手,它却总在Library里给你写"回忆录"?卸载的Final Cut Pro像电子幽灵般阴魂不散?总是会有残留文件,别慌!这份Mac软件卸载指南,将用最硬核的方式教你"数字分手术"࿰…...

ETLCloud可能遇到的问题有哪些?常见坑位解析
数据集成平台ETLCloud,主要用于支持数据的抽取(Extract)、转换(Transform)和加载(Load)过程。提供了一个简洁直观的界面,以便用户可以在不同的数据源之间轻松地进行数据迁移和转换。…...

浅谈不同二分算法的查找情况
二分算法原理比较简单,但是实际的算法模板却有很多,这一切都源于二分查找问题中的复杂情况和二分算法的边界处理,以下是博主对一些二分算法查找的情况分析。 需要说明的是,以下二分算法都是基于有序序列为升序有序的情况…...
Spring数据访问模块设计
前面我们已经完成了IoC和web模块的设计,聪明的码友立马就知道了,该到数据访问模块了,要不就这俩玩个6啊,查库势在必行,至此,它来了。 一、核心设计理念 1、痛点在哪 应用离不开数据(数据库、No…...

学习STC51单片机32(芯片为STC89C52RCRC)OLED显示屏2
每日一言 今天的每一份坚持,都是在为未来积攒底气。 案例:OLED显示一个A 这边观察到一个点,怎么雪花了就是都是乱七八糟的占满了屏幕。。 解释 : 如果代码里信号切换太快(比如 SDA 刚变,SCL 立刻变&#…...

LeetCode - 199. 二叉树的右视图
题目 199. 二叉树的右视图 - 力扣(LeetCode) 思路 右视图是指从树的右侧看,对于每一层,只能看到该层最右边的节点。实现思路是: 使用深度优先搜索(DFS)按照"根-右-左"的顺序遍历树记录每个节点的深度对于…...