(24)(24.4) MultiWii/DJI/HDZero OSD (version 4.2 and later)(一)
文章目录
前言
1 基于遥测的OSD
前言
ArduPilot 使用基于MSP(MultiWii 串行协议)的协议支持多种类型的屏幕显示(OSD):
- 基于 MSP 遥测的操作系统,如大疆 FPV 护目镜 V1/V2、大疆护目镜 RE、FatShark ByteFrost、FatShark-SharkByte(fw 09042021 之前)、MWOSD等。
- 基于 DisplayPort 的操作系统,如 HDZero(以前称为 FatShark SharkByte(fw 09042021及更高版本))、Walksnail、使用 wtf-os 固件和 msdp osd 模块(msdp-osd module)的 DJI 护目镜,以及 MWOSD 的 DisplayPort 模式/固件。
仅基于遥测的 OSD 将根据使用串行端口协议“32”发送的标准 MSP 遥测传感器消息,使用自己的引擎在屏幕上呈现 OSD 面板项目,因此 ArduPilot 无法控制项目的外观。
DJI 2/V1/V2 护目镜还具有扩展协议,该协议使用串行端口协议“33”发送,允许在使用扩展的自定义 OSD 功能时为每个 OSD 面板提供位置信息。这也允许显示任何 ArduPilot OSD 面板。
另一方面,DisplayPort 是一种 MSP 协议扩展,允许 ArduPilot 指定要在外部 OSD 显示器上绘制的文本字符/图标及其位置,就像在使用串行端口协议“42”的内部集成模拟 OSD 上一样。DisplayPort 也称为 CANVAS MODE(不正确)。基本上,它是一个远程纯文本帧缓冲区,使用本地字体(渲染引擎本地,即 OSD 硬件)渲染通过 MSP 发送的字符串。
1 基于遥测的OSD
基于遥测的 OSD 将使用自己的引擎在屏幕上渲染 OSD 面板项目,因此 ArduPilot 无法控制项目的外观。基于遥测的操作系统的另一个局限性是,ArduPilot 无法随意添加新的面板项目,供应商有责任通过推出新的固件版本来添加新功能。
如果存在板载集成模拟 OSD,并且用户希望同时拥有这两个 OSD,则也可以激活它。例如,在使用 DJI 护目镜/空气系统进行中程飞行,但仍使用内部 OSD 运行远程模拟 VTX 的飞行器上,当飞行器超过 HD DJI 护目镜的范围时。这种配置可以使用一个针对 DJI Goggles 优化的 OSD 屏幕,另一个用于集成 OSD,用户可以根据正在观看的视频系统在它们之间切换。
配置
示例假设空气单元连接到飞行控制器的 SERIAL2。
- 如果没有使用集成 OSD,则OSD_TYPE= 3,如果存在集成 OSD 并且用户希望同时使用这两个 OSD,则为= 1;
- SERIAL2_PROTOCOL= 32(MSP);
- SERIAL2_BAUD= 115;
- 如果空气单元要通过 RX 和 TX 输入连接到 AutoPilot 串行端口 TX/RX,则MSP_OPTIONS 位0= 0(不启用遥测模式)。如果独立 OSD 单元仅通过单线从其 RX 输入连接到串行端口的TX,则设置位0= 1(启用遥测模式)。这被称为“推送”模式。
OSD面板可用于MSP遥测操作系统
这些是基于遥测的 OSD 支持的仅限 MSP 的 OSD 元素(假设 OSD 本身有能力显示这些遥测值):
| OSD Parameter | Notes |
| OSDn_ALTITUDE | Home relative altitude |
| OSDn_ARMING | Arming status, hidden when armed otherwise showing DISARMED |
| OSDn_ASPEED | Please refer to OSDn_GSPEED for more info on enabling airspeed display |
| OSDn_BAT_VOLT | First battery voltage |
| OSDn_BATBAR | First battery remaining percentage rendered as a bar based on declared capacity and consumed mAh |
| OSDn_BATUSED | First battery consumed mAh |
| OSDn_CELLVOLT | First battery average cell voltage, if automatic cell detection fails please override with MSP_OSD_NCELLS |
| OSDn_CLK | Realtime clock (requires GPX fix) |
| OSDn_CRSSHAIR | Artificial horizon is not supported so crosshair is often kept hidden |
| OSDn_CURRENT | First battery current |
| OSDn_ESCTEMP | On DJI V1/V2 Goggles this will report the highest ESC temperature |
| OSDn_FLTMODE | DJI hardware does not support ArduPilot’s flight modes! This item will generally be blank and only show !FS! while in failsafe! |
| OSDn_GPSLAT | GPS Latitude in decimal format |
| OSDn_GPSLONG | GPS Longitude in decimal format |
| OSDn_GSPEED | This item shows ground speed unless OSDn_ASPEED_EN = 1 in which case it will show true airspeed if an airspeed sensor is present or estimated airspeed otherwise. The position on screen is set by OSDn_GSPEED_X and OSDn_GSPEED_Y regardless of the value of OSDn_ASPEED_EN |
| OSDn_HEADING | Not supported by DJI V1/V2 Goggles |
| OSDn_HOMEDIR | Rotating arrow pointing to home |
| OSDn_HOMEDIST | Distance from home |
| OSDn_HORIZON | Not supported by DJI V1/V2 Goggles |
| OSDn_MESSAGE | This will display status text messages as rolling text. Status text messages will be hidden after a couple seconds and the panel will show the current flightmode. If OSDn_WIND_EN is set to 1, this item also displays wind info next to the current flight mode as a rotating arrow and speed. |
| OSDn_PITCH | Pitch angle |
| OSDn_POWER | Instant power calculated as voltage * current |
| OSDn_ROLL | Roll angle |
| OSDn_RSSI | Rssi as configured in RSSI_TYPE: RSSI Type |
| OSDn_SATS | On DJI V1/V2 Goggles when there’s no telemetry based MSP OSDfix it will report 14 sats, this is a known DJI bug |
| OSDn_SIDEBARS | Not supported by DJI V1/V2 Goggles |
| OSDn_VSPEED | Vertical speed |
| OSDn_WIND | Please refer to OSDn_MESSAGE for wind speed and direction rendering |
DJI 护目镜在默认 OSD 显示模式下支持 MSP 遥测显示,并附有以下注意事项:
- ArduPilot 目前支持 V1 和 V2 DJI FPV 护目镜提供的所有 OSD 面板项目,如上表所示;
- 目前不支持更改公制和英制以外的显示单位;
- 支持多个屏幕和这些屏幕的远程切换;
- 支持在专用屏幕上显示统计信息,有关详细信息,请参阅下文;
- 目前不支持 RSSI、电压等的警告级别。
DJI V1 FPV 护目镜

DJI 护目镜 RE

相关文章:
(24)(24.4) MultiWii/DJI/HDZero OSD (version 4.2 and later)(一)
文章目录 前言 1 基于遥测的OSD 前言 ArduPilot 使用基于MSP(MultiWii 串行协议)的协议支持多种类型的屏幕显示(OSD): 基于 MSP 遥测的操作系统,如大疆 FPV 护目镜 V1/V2、大疆护目镜 RE、FatShark Byte…...

HiveSQL:提取json串内容——get_json_oject和json_tuple
提取json串中内容,json格式示例如下 方法(运行环境Hive) get_json_objectjson_tuple get_json_object select json_data,get_json_object(json_data,$.price) as price -- 取第一层,get_json_object(json_data,$.inquiry_params) as in…...

Clickhouse 二进制安装
下载对应版本https://github.com/ClickHouse/ClickHouse 分别选择arm64/x86_64 对应的tgz 场景是需要把ck所有文件安装指定目录,使用rpm会散布在各个目录不方便管控 下载client,common-static,server这三个 将相同的目录合并成一个(这里注意需要在l…...

大数据开发工程师面试整理-项目经验
在面试或职业发展中,分享项目经验是展示个人能力和专业知识的重要途径。大数据开发工程师的项目经验通常涉及数据处理、系统设计、性能优化以及与团队协作等多个方面。以下是如何有效地展示大数据项目经验的指导,以及一个示范性的项目经验描述。 1. 结构化描述项目经验 ● 项…...

游戏引擎详解——图片
图片 图片的格式 图片文件格式pngjpg 纹理压缩格式ETC1/2PVRTCASTC 图片的属性 图片属性解释分辨率宽高像素值(pt),如:1024*1024位深度用来存储像素颜色的值,如RGBA8888,红黄蓝透明度4个维度每个8bit&…...

电商API数据接口在电商运营电商数据分析中的作用?
电商运营中,品牌方使用电商API数据接口可以带来众多益处,具体包括但不限于以下几点: 实时数据同步:通过API接口,品牌方可以实时获取商品库存、订单状态、价格变动等信息,保证数据的时效性和准确性ÿ…...
)
Java OkHttp使用(二)
文章目录 引言使用 OkHttp 发送回调其他 引言 记录一下 OkHttp 的使用;OkHttp 异步发送回调请求,增加回调失败重试。 使用 OkHttp 发送回调 /*** 回调重试类*/ Data public class CallBackRetryData {/*** 回调信息JSON*/private JSONObject bodyRequ…...

宝塔(bt.cn)面板新手小白使用中常见问题
1.新手小白-服务器正确的安装宝塔的粗略教程 购买服务器后首先是挂载磁盘再安装宝塔,步骤不要搞错,免得安全后磁盘空间不对需要挂载多免费异步,切记切记 挂载磁盘:(挂载磁盘只需一行命令即可,请根据自己的系统选择正确…...
)
【LeetCode:3133】数组最后一个元素的最小值(Java)
题目链接 3133. 数组最后一个元素的最小值 题目描述 给你两个整数 n 和 x 。你需要构造一个长度为 n 的 正整数 数组 nums ,对于所有 0 < i < n - 1 ,满足 nums[i 1] 大于 nums[i] ,并且数组 nums 中所有元素的按位 AND 运算结果为…...

FCARM - Output Name not specified, please check ‘Options for Target - Utilities‘解决方法
出现这个问题的原因是导入文件时默认类型选错了,修改文件类型即可 如图右键导入文件,选择“Options for File OLED.C” 选择“File Type”,将头文件文件类型修改为“Text Documents file”,将.c文件文件类型修改为“C Sorce file” 第二方…...

自行车制造5G智能工厂工业物联数字孪生平台,推进制造业数字化
在当今这个日新月异的数字化时代,制造业正经历着前所未有的变革,自行车制造5G智能工厂工业物联数字孪生平台的兴起,无疑是这场转型浪潮中一股强劲力量。自行车制造5G智能工厂工业物联数字孪生平台的成功应用,不仅仅是技术上的突破…...
一文彻底搞懂Transformer - FFNN(前馈神经网络)
Transformer 神经网络: 神经网络(Neural Networks)是一种模仿生物神经网络的结构和功能的数学或计算模型。它由大量的人工神经元(也称为节点或处理单元)相互连接而成,这些神经元之间通过带有权重的连接进行…...

SpringCloud Gateway及 Springboot 服务 跨域配置
SpringCloud Gateway 跨域配置 配置文件 #跨域支持 spring.cloud.gateway.globalcors.cors-configurations.[/**].allowed-headers[0]* spring.cloud.gateway.globalcors.cors-configurations.[/**].allowed-methods[0]* spring.cloud.gateway.globalcors.cors-configuration…...

【Solidity】安全与校验
信息传输 发送方 A: 计算消息 message 的哈希值 H:hash(message) H 私钥 privateKey ➕ 哈希值 H 🟰 签名 signature:signature sign(H, privateKey) 将消息 message 和签名 signature 发送给 B 接收方 B: 计算…...
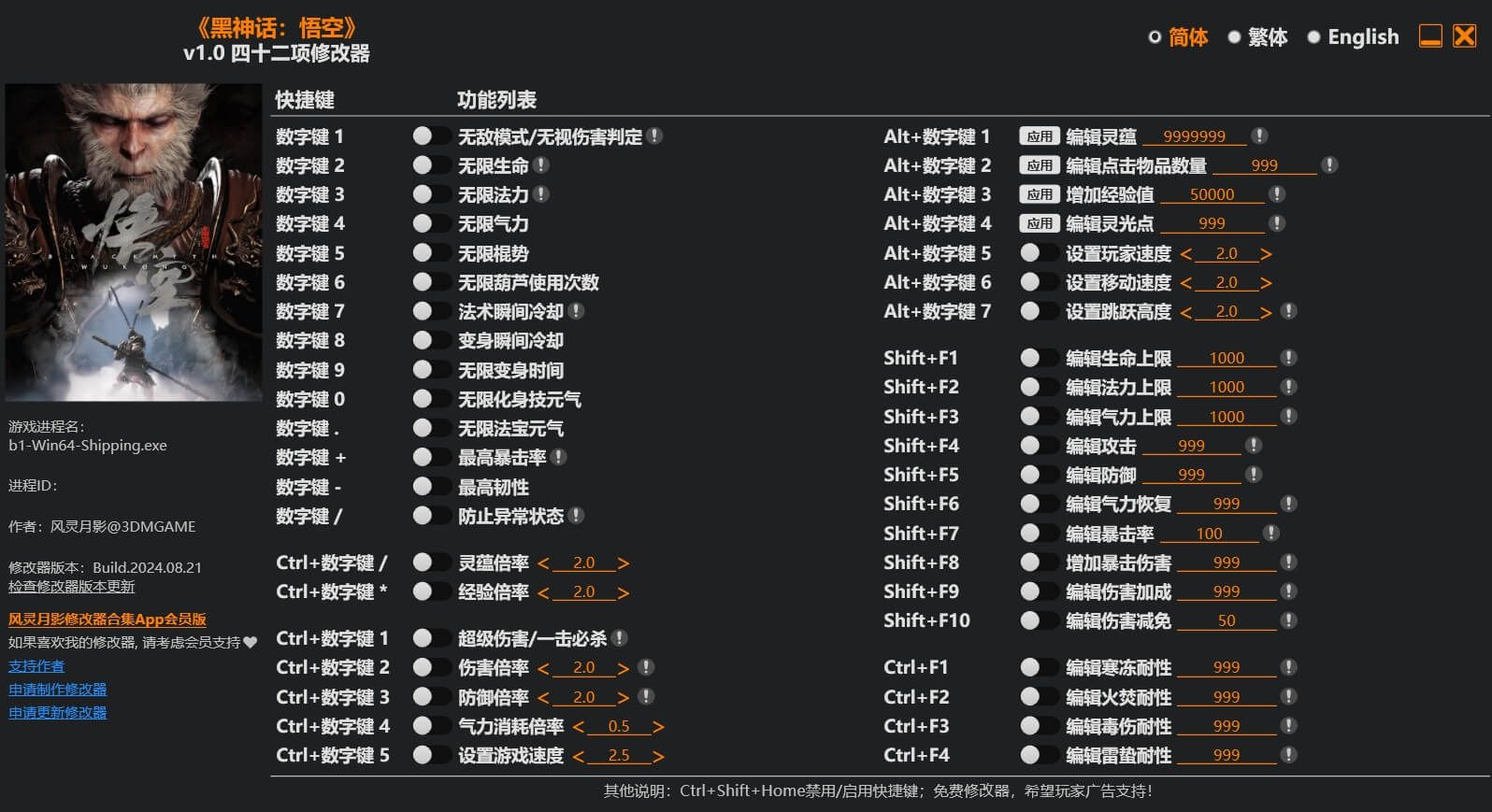
黑神话悟空四十二项修改器 v1.0
软件简介 黑神话悟空四十二项修改器由风灵月影精心打磨,为《黑神话悟空》这款备受瞩目的游戏量身定制。这款修改器界面简洁、体积小巧、功能强大,它致力于为玩家提供便捷的游戏体验,让您能够根据个人喜好和需求,轻松调整游戏内的…...
RM电控RTOS
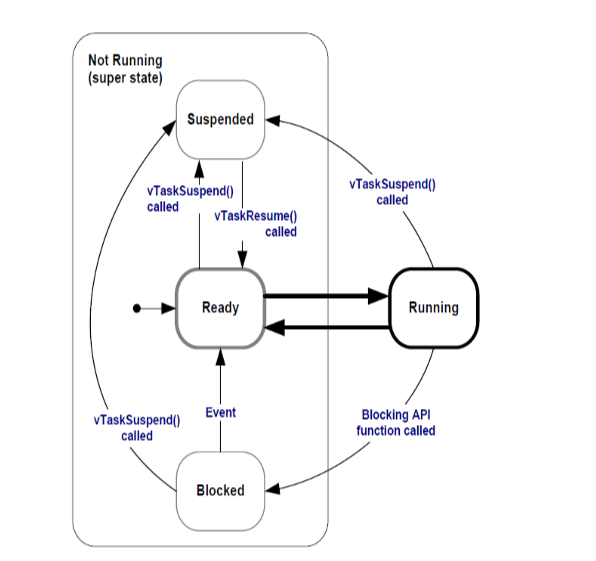
OS即(operating system)操作系统,比如我们常用的windows系统,mac系统,android系统,ios系统,linux系统等,都属于操作系统。操作系统的本质是一个特殊的软件,它直接管理硬件…...

Arduino开源四足蜘蛛机器人制作教程
视频教程:手把手叫你做四足蜘蛛机器人——1零件介绍_哔哩哔哩_bilibili 一、项目介绍 1.1 项目介绍 Arduino主控,图形化编程,趣味学习 Arduino nano开发板舵机扩展底板 4.8V可充电电池,支持Arduino C语言编程和米思齐图形化编程…...

【Axure高保真原型】中继器表格——标签使用情况案例
今天和大家分享中继器表格——标签使用情况案例的原型模板,效果包括: 模糊搜索——输入标签编号或者标签名称,可以快速查找对应的数据 排序——点击排序按钮,可以按升序或降序排列 分页——点击上拉列表,可以选择表格…...

ABAP字符串反转 and 寻找字符所在位置 and 根据数量汇总时把数量转为非数值类型
1.字符串反转 and 寻找字符所在位置 LOOP AT gt_wlmc ASSIGNING FIELD-SYMBOL(<fs_wlmc>). "遍历内表<fs_wlmc>-matnr <fs_wlmc>-matnr(8).DATA: l_output TYPE char50,v_off2 TYPE i,str TYPE i,str2 TYPE i.CALL FUNCTION STRING_REVERS…...

【机器学习第十二章——计算学习理论】
机器学习第十二章——计算学习理论 12.计算学习理论12.1 基础知识12.1 可能学习近似正确假设(PAC)12.3 有限假设空间12.4 VC维 12.计算学习理论 12.1 基础知识 从理论上刻画了若干类型的机器学习问题中的困难和若干类型的机器学习算法的能力 这个理论要…...

HTML 语义化
目录 HTML 语义化HTML5 新特性HTML 语义化的好处语义化标签的使用场景最佳实践 HTML 语义化 HTML5 新特性 标准答案: 语义化标签: <header>:页头<nav>:导航<main>:主要内容<article>&#x…...

C++初阶-list的底层
目录 1.std::list实现的所有代码 2.list的简单介绍 2.1实现list的类 2.2_list_iterator的实现 2.2.1_list_iterator实现的原因和好处 2.2.2_list_iterator实现 2.3_list_node的实现 2.3.1. 避免递归的模板依赖 2.3.2. 内存布局一致性 2.3.3. 类型安全的替代方案 2.3.…...
)
论文解读:交大港大上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(二)
HoST框架核心实现方法详解 - 论文深度解读(第二部分) 《Learning Humanoid Standing-up Control across Diverse Postures》 系列文章: 论文深度解读 + 算法与代码分析(二) 作者机构: 上海AI Lab, 上海交通大学, 香港大学, 浙江大学, 香港中文大学 论文主题: 人形机器人…...
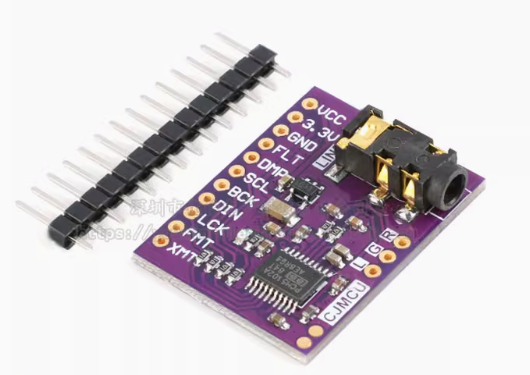
ESP32 I2S音频总线学习笔记(四): INMP441采集音频并实时播放
简介 前面两期文章我们介绍了I2S的读取和写入,一个是通过INMP441麦克风模块采集音频,一个是通过PCM5102A模块播放音频,那如果我们将两者结合起来,将麦克风采集到的音频通过PCM5102A播放,是不是就可以做一个扩音器了呢…...

TRS收益互换:跨境资本流动的金融创新工具与系统化解决方案
一、TRS收益互换的本质与业务逻辑 (一)概念解析 TRS(Total Return Swap)收益互换是一种金融衍生工具,指交易双方约定在未来一定期限内,基于特定资产或指数的表现进行现金流交换的协议。其核心特征包括&am…...
智能仓储的未来:自动化、AI与数据分析如何重塑物流中心
当仓库学会“思考”,物流的终极形态正在诞生 想象这样的场景: 凌晨3点,某物流中心灯火通明却空无一人。AGV机器人集群根据实时订单动态规划路径;AI视觉系统在0.1秒内扫描包裹信息;数字孪生平台正模拟次日峰值流量压力…...
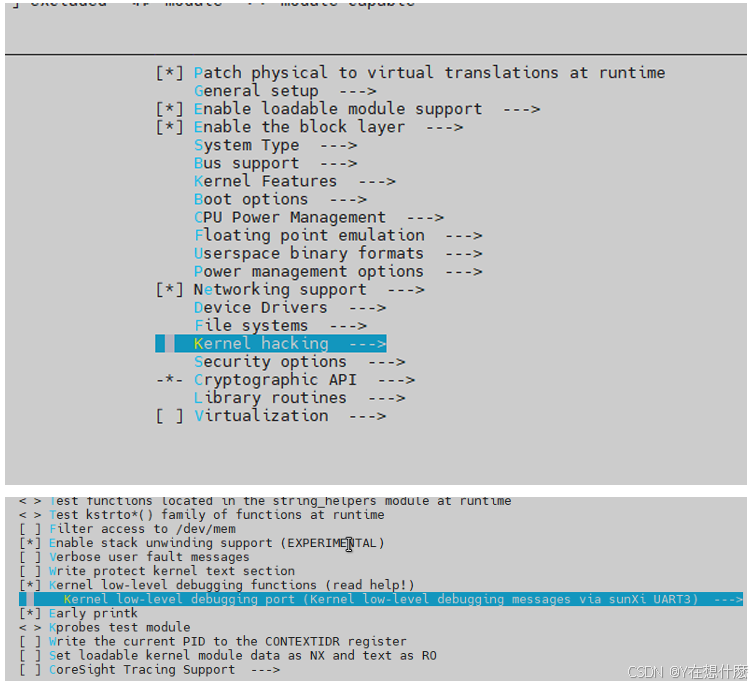
全志A40i android7.1 调试信息打印串口由uart0改为uart3
一,概述 1. 目的 将调试信息打印串口由uart0改为uart3。 2. 版本信息 Uboot版本:2014.07; Kernel版本:Linux-3.10; 二,Uboot 1. sys_config.fex改动 使能uart3(TX:PH00 RX:PH01),并让boo…...
使用 SymPy 进行向量和矩阵的高级操作
在科学计算和工程领域,向量和矩阵操作是解决问题的核心技能之一。Python 的 SymPy 库提供了强大的符号计算功能,能够高效地处理向量和矩阵的各种操作。本文将深入探讨如何使用 SymPy 进行向量和矩阵的创建、合并以及维度拓展等操作,并通过具体…...

算法笔记2
1.字符串拼接最好用StringBuilder,不用String 2.创建List<>类型的数组并创建内存 List arr[] new ArrayList[26]; Arrays.setAll(arr, i -> new ArrayList<>()); 3.去掉首尾空格...

Python ROS2【机器人中间件框架】 简介
销量过万TEEIS德国护膝夏天用薄款 优惠券冠生园 百花蜂蜜428g 挤压瓶纯蜂蜜巨奇严选 鞋子除臭剂360ml 多芬身体磨砂膏280g健70%-75%酒精消毒棉片湿巾1418cm 80片/袋3袋大包清洁食品用消毒 优惠券AIMORNY52朵红玫瑰永生香皂花同城配送非鲜花七夕情人节生日礼物送女友 热卖妙洁棉…...