Ubuntu 开机自启动 .py / .sh 脚本,可通过脚本启动 roslaunch/roscore等
前言
项目中要求上电自启动定位程序,所以摸索了一种 Ubuntu 系统下开机自启动的方法,开机自启动 .sh 脚本,加载 ROS 环境的同时启动 .py 脚本。在 . py 脚本中启动一系列 ROS 节点。
一、 .sh 脚本的编写
#!/bin/bash
# gnome-terminal -- bash -c "/home/wu/startup.sh; exec bash"
sleep 2echo "----------加载 ROS 环境----------"
source /opt/ros/noetic/setup.bash
sleep 2
echo $ROS_PACKAGE_PATHecho "----------启动 python 脚本----------"
/usr/bin/python3 /home/wu/test.py# sh脚本等待所有后台进程完成后结束
wait
exit 0启动 .sh 脚本时,首先沉睡 2 秒,等待其它部分启动完成后加载 ROS 环境,之后输出 $ROS_PACKAGE_PATH 确定 ROS 环境是否加载好,最后启动 .py 脚本。
二、 .py 脚本的编写
首先安装依赖 wmctrl。wmctrl 是一个用于控制 X Window 管理器的命令行工具,通常用于 Linux 系统,特别是对窗口进行操作和管理。
sudo apt-get update
sudo apt-get install wmctrl#!/usr/bin/python3.8
# coding=utf8
import subprocess
import rospyi = 101def close_terminal_by_name(terminal_name):# 使用 wmctrl -l 来列出所有窗口和其标题wmctrl_process = subprocess.Popen(["wmctrl", "-l"], stdout=subprocess.PIPE, stderr=subprocess.PIPE, universal_newlines=True)stdout, _ = wmctrl_process.communicate()# 在输出中查找指定名称的终端for line in stdout.splitlines():if terminal_name in line:# 获取终端的窗口 ID,并使用 wmctrl -i -c 命令关闭该终端window_id = line.split()[0]subprocess.run(["wmctrl", "-i", "-c", window_id])print("已关闭终端:", terminal_name)return# 如果未找到指定名称的终端print("未找到名称为", terminal_name, "的终端")def step(commands):command_str = " && ".join(commands) # 将命令列表连接为一个字符串,使用 && 分隔# print(command_str)# 使用 exec bash 保持终端窗口打开command_str = command_str + "; exec bash"# subprocess.run() 函数用于执行外部命令。它会创建一个新的子进程,并等待子进程执行完成后返回。# gnome-terminal" 是要执行的命令,即打开一个新的终端# "--" 表示后面的参数将被传递给 gnome-terminal 命令# 使用 bash -c 执行命令rospy.sleep(1)subprocess.run(["gnome-terminal", "--", "bash", "-c", command_str]) # title 无效???# 添加标题:"--title", str(i),def step_name(commands):global icommand_str = " && ".join(commands) # 将命令列表连接为一个字符串,使用 && 分隔# print(command_str)# 使用 exec bash 保持终端窗口打开command_str = command_str + "; exec bash"# subprocess.run() 函数用于执行外部命令。它会创建一个新的子进程,并等待子进程执行完成后返回。# gnome-terminal" 是要执行的命令,即打开一个新的终端# "--" 表示后面的参数将被传递给 gnome-terminal 命令# 使用 bash -c 执行命令rospy.sleep(1)subprocess.run(["gnome-terminal", "--title", str(i), "--", "bash", "-c", command_str]) # title 无效???# 添加标题:"--title", str(i),i = i + 1def start_roscore():command = "roscore"print("---启动{}".format(command))subprocess.Popen(["gnome-terminal", "--", "bash", "-c", command])def kill_roscore():close_terminal_by_name("roscore http://WP:11311/")if __name__ == '__main__':start_roscore() # 第一时间启动roscorerospy.sleep(2)rospy.init_node('test')rospy.loginfo('*****************************')command_str = ["cd /","sudo apt-get update"]rospy.sleep(1)step(command_str)rospy.sleep(1).py 脚本主要包括 3 个函数, step(commands), step_name(commands) 和 close_terminal_by_name(terminal_name)
- step(commands):将要输入到终端的命令以如下方式定义
# 雷达驱动command_drive = ["cd /home/wu/3rdparty/driver/ws_livox","source ./devel/setup.bash","roslaunch livox_ros_driver2 msg_MID360.launch"]然后将 command_drive 以参数形式传入 step(commands) 函数中,启动 rosrun 节点。
当以这种方式启动 rosrun 节点时,wmctrl 中没有相应标题,无法通过 title 关闭该节点。
当以这种方式启动 roslaunch 节点时,wmctrl 中有相应标题,可通过 title 关闭该节点,默认 title 如下:
/home/wu/3rdparty/driver/ws_livox/src/livox_ros_driver2/launch_ROS1/msg_MID360.launch http://localhost:11311 前半部分为 .roslaunch 文件路径,后半部分 http://localhost:11311 是 ROS 中的 ROS Master 运行的地址。
- step_name(commands)
通过 step_name(commands) 函数启动 rosrun 节点时,可以为其定义 title,定义的 title 为字符串 101。当启动多个step_name(commands) 函数时,title 以 101 为起点递增。此时,可将 101 作为参数传入 close_terminal_by_name(terminal_name) 函数中关闭 ros 节点。
- close_terminal_by_name(terminal_name)
将 wmctrl 的 title 作为参数传入该函数,关闭相应的 ros 节点。
三、sudo 无需输入密码
当 command 中包含 sudo 命令时,需要手动输入密码,会影响脚本的自动化,故通过修改 ubuntu 设置 sudo 时无需输入密码。
使用 visudo 命令编辑 sudoers 文件:
sudo visudo
在最后一行添加如下命令,然后 ctrl + X 离开。
UserName ALL=(ALL) NOPASSWD: ALL设置成功后输入 sudo 命令将不会要求输入密码。
四、Ubuntu 启动应用程序 设置开机自启动 .sh 脚本
完成上述设置后,按照如下配置



输入以下命令开机自启动 .sh 脚本
gnome-terminal -- bash -c "/home/wu/startup.sh; exec bash"参考
gnome-terminal - A terminal emulator for GNOME
Ubuntu 开机自启动python程序或roslaunch的方法
ubuntu中的sudoers文件损坏,修复办法(附图、详细)
普通用户执行 sudo 命令而不用输入密码
相关文章:
Ubuntu 开机自启动 .py / .sh 脚本,可通过脚本启动 roslaunch/roscore等
前言 项目中要求上电自启动定位程序,所以摸索了一种 Ubuntu 系统下开机自启动的方法,开机自启动 .sh 脚本,加载 ROS 环境的同时启动 .py 脚本。在 . py 脚本中启动一系列 ROS 节点。 一、 .sh 脚本的编写 #!/bin/bash # gnome-terminal -- …...

RabbitMQ 消息队列:生产者与消费者实现详解
在分布式系统中,消息队列(Message Queue, MQ)是一种重要的组件,用于解耦系统、异步处理任务以及实现系统间的通信。RabbitMQ 是一个流行的开源消息代理软件,它实现了高级消息队列协议(AMQP)。在…...

vue3项目中组件切换不起作用
以下这种方式写页面中组件切换,不起作用。 <component :is"steps[compIndex].comp" />解决:使用shallowReactive或者shallowRef把对应的组件名称重新定义下。 <component :is"compNames[steps[compIndex].comp]" /> &…...

YOLOv11改进策略【损失函数篇】| Slide Loss,解决简单样本和困难样本之间的不平衡问题
一、本文介绍 本文记录的是改进YOLOv11的损失函数,将其替换成Slide Loss,并详细说明了优化原因,注意事项等。Slide Loss函数可以有效地解决样本不平衡问题,为困难样本赋予更高的权重,使模型在训练过程中更加关注困难样…...

动静态库(Linux)
文章目录 前言一、静态库二、动态库三、深入理解动态库总结 前言 我们之前用过c语言的库.Linux中默认的都是使用动态库,如果想要使用静态库,就必须加上-static选项。默认都是安装的动态库,系统中一般没有静态库,如果要使用&#…...

51单片机和ARM单片机的区别
在嵌入式系统设计与应用中,单片机作为核心控制单元,扮演着至关重要的角色。其中,51单片机和ARM单片机作为两种常见的单片机类型,各自具有独特的特点和优势。本文将从多个维度深入探讨这两种单片机的区别,以便读者更好地…...

[Day 81] 區塊鏈與人工智能的聯動應用:理論、技術與實踐
區塊鏈在食品安全中的應用 前言 食品安全一直是全球關注的問題,隨著全球供應鏈的複雜性增加,追踪食品從生產到消費的過程變得愈發困難。區塊鏈技術以其去中心化、不可篡改的特性,為食品安全提供了可靠的解決方案。在這篇文章中,…...

flac格式怎么转mp3?关于flac转为MP3的方法介绍
flac格式怎么转mp3?MP3格式经过压缩,相较于flac文件,显著减小了文件体积。这一特点使得音乐的存储和传输更加便捷,尤其适合移动设备以及存储空间有限的场景。由于MP3文件体积较小,分享音乐变得非常简单,无论…...

【笔记】KaiOS 系统框架和应用结构(APP界面逻辑)
KaiOS系统框架 最早自下而上分成Gonk-Gecko-Gaia层,代码有同名的目录,现在已经不用这种称呼。 按照官网3.0的版本迭代介绍,2.5->3.0已经将系统更新成如下部分: 仅分为上层web应用和底层平台核心,通过WebAPIs连接上下层,这也是kaios系统升级变更较大的部分。 KaiOS P…...

java项目实现钉钉异常告警实时监控
最近有个小伙伴问我,我们的项目核心业务的地方总是有异常,虽然有打印日志,但不能立马通知我;所以今天我就教大家如何实现异常报警实时提醒 1.需要有钉钉 自己新建的企业用户 2.建一个群,需要有三人以上;…...

Spring Boot应用:电子商务平台开发
第2章 关键技术简介 2.1 Java技术 Java是一种非常常用的编程语言,在全球编程语言排行版上总是前三。在方兴未艾的计算机技术发展历程中,Java的身影无处不在,并且拥有旺盛的生命力。Java的跨平台能力十分强大,只需一次编译…...

怎么在Vue3项目中引入Vant组件库并使用?
文章目录 前言一、项目中使用步骤1.安装:2.样式的导入(2种方法)2.1 main.ts全局导入(平常自己的项目用的这个全局)2.2 按需引入组件样式 (简单介绍一下)1.安装插件2.配置插件 3.组件按需使用:App.vue 总结 …...

springboot中有哪些方式可以解决跨域问题
文章目录 什么是跨域解决方案CrossOrigin注解实现WebMvcConfigurer接口CorsFilter过滤器如何选择? 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。 Talk is cheap ࿰…...

Temporal Dynamic Quantization for Diffusion Models阅读
文章目录 AbstractIntroductionBackgrounds and Related Works2.1 扩散模型2.2 量化2.3 量化感知训练和训练后量化 TemporalDynamic Quantization3.1 量化方法3.2 扩散模型量化的挑战3.3 TDQ模块的实现3.4 工程细节时间步的频率编码TDQ模块的初始化 Experimental SetupResults5…...

828华为云征文|华为云Flexus X实例性能实测:速度与稳定性的完美结合
828华为云征文|华为云Flexus X实例性能实测:速度与稳定性的完美结合 前言一、Flexus云服务器X实例介绍1.1 Flexus云服务器X实例简介1.2 Flexus云服务器X实例特点1.3 Flexus云服务器X实例使用场景 二、实践环境介绍2.1 本次实践环境规划2.2 本次实践介绍 …...

【PyTorch】图像分割
图像分割是什么 Image Segmentation 将图像每一个像素分类 图像分割分类 超像素分割:少量超像素代替大量像素,常用于图像预处理语义分割:逐像素分类,无法区分个体实例分割:对个体目标进行分割全景分割:…...

如何快速建立自己的异地互联的远程视频监控系统,通过web浏览器可以直接查看公网上的监控视频(上)
目录 一、需求 二、方案 2.1、计划方案 2.2、实施准备 2.2.1所需配置的产品和服务 2.2.1.1云主机 (1)选择云平台 (2)配置云服务器 2.2.2.2视频监控平台软件 (1)视频监控平台软件 (2&am…...

实验2思科网院项目2.7.2-packet-tracer---configure-single-area-ospfv2---实践练习
实践练习 2.7.2-packet-tracer---configure-single-area-ospfv2---实践练习physical-mode 实验拓扑 相关设备配置 实验目标: 第 1 部分:构建网络并配置设备的基本设置 第 2 部分:配置和验证单区域 OSPFv2 的基本部署 第 3 部分:优化和验…...

Nginx实战经验分享:从小白到专家的成长历程!
目录 一、Nginx概述1、Nginx简介(1)事件驱动模型(2)异步处理(3)模块化设计(4)高性能(5)反向代理(6)负载均衡(7)…...
)
从画质设置看游戏引擎(其一)
前往我的博客,获取无广告,更好的阅读体验 1. 抗锯齿(Anti-Aliasing) 1.1 锯齿问题的起因 在三维模型的世界中,模型是连续的,但是屏幕像素是不连续,是离散的; 即当一个圆形显示在显…...
JavaSec-RCE
简介 RCE(Remote Code Execution),可以分为:命令注入(Command Injection)、代码注入(Code Injection) 代码注入 1.漏洞场景:Groovy代码注入 Groovy是一种基于JVM的动态语言,语法简洁,支持闭包、动态类型和Java互操作性,…...

conda相比python好处
Conda 作为 Python 的环境和包管理工具,相比原生 Python 生态(如 pip 虚拟环境)有许多独特优势,尤其在多项目管理、依赖处理和跨平台兼容性等方面表现更优。以下是 Conda 的核心好处: 一、一站式环境管理:…...

反向工程与模型迁移:打造未来商品详情API的可持续创新体系
在电商行业蓬勃发展的当下,商品详情API作为连接电商平台与开发者、商家及用户的关键纽带,其重要性日益凸显。传统商品详情API主要聚焦于商品基本信息(如名称、价格、库存等)的获取与展示,已难以满足市场对个性化、智能…...

《Playwright:微软的自动化测试工具详解》
Playwright 简介:声明内容来自网络,将内容拼接整理出来的文档 Playwright 是微软开发的自动化测试工具,支持 Chrome、Firefox、Safari 等主流浏览器,提供多语言 API(Python、JavaScript、Java、.NET)。它的特点包括&a…...
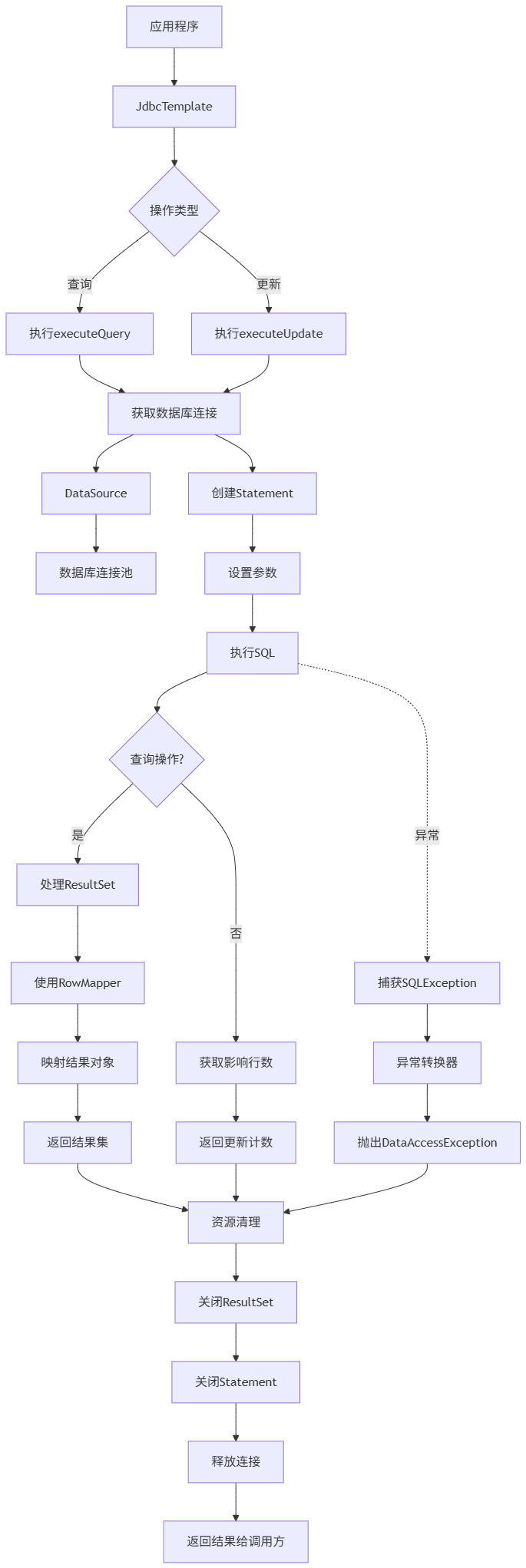
Spring数据访问模块设计
前面我们已经完成了IoC和web模块的设计,聪明的码友立马就知道了,该到数据访问模块了,要不就这俩玩个6啊,查库势在必行,至此,它来了。 一、核心设计理念 1、痛点在哪 应用离不开数据(数据库、No…...

DeepSeek 技术赋能无人农场协同作业:用 AI 重构农田管理 “神经网”
目录 一、引言二、DeepSeek 技术大揭秘2.1 核心架构解析2.2 关键技术剖析 三、智能农业无人农场协同作业现状3.1 发展现状概述3.2 协同作业模式介绍 四、DeepSeek 的 “农场奇妙游”4.1 数据处理与分析4.2 作物生长监测与预测4.3 病虫害防治4.4 农机协同作业调度 五、实际案例大…...

音视频——I2S 协议详解
I2S 协议详解 I2S (Inter-IC Sound) 协议是一种串行总线协议,专门用于在数字音频设备之间传输数字音频数据。它由飞利浦(Philips)公司开发,以其简单、高效和广泛的兼容性而闻名。 1. 信号线 I2S 协议通常使用三根或四根信号线&a…...

探索Selenium:自动化测试的神奇钥匙
目录 一、Selenium 是什么1.1 定义与概念1.2 发展历程1.3 功能概述 二、Selenium 工作原理剖析2.1 架构组成2.2 工作流程2.3 通信机制 三、Selenium 的优势3.1 跨浏览器与平台支持3.2 丰富的语言支持3.3 强大的社区支持 四、Selenium 的应用场景4.1 Web 应用自动化测试4.2 数据…...

职坐标物联网全栈开发全流程解析
物联网全栈开发涵盖从物理设备到上层应用的完整技术链路,其核心流程可归纳为四大模块:感知层数据采集、网络层协议交互、平台层资源管理及应用层功能实现。每个模块的技术选型与实现方式直接影响系统性能与扩展性,例如传感器选型需平衡精度与…...
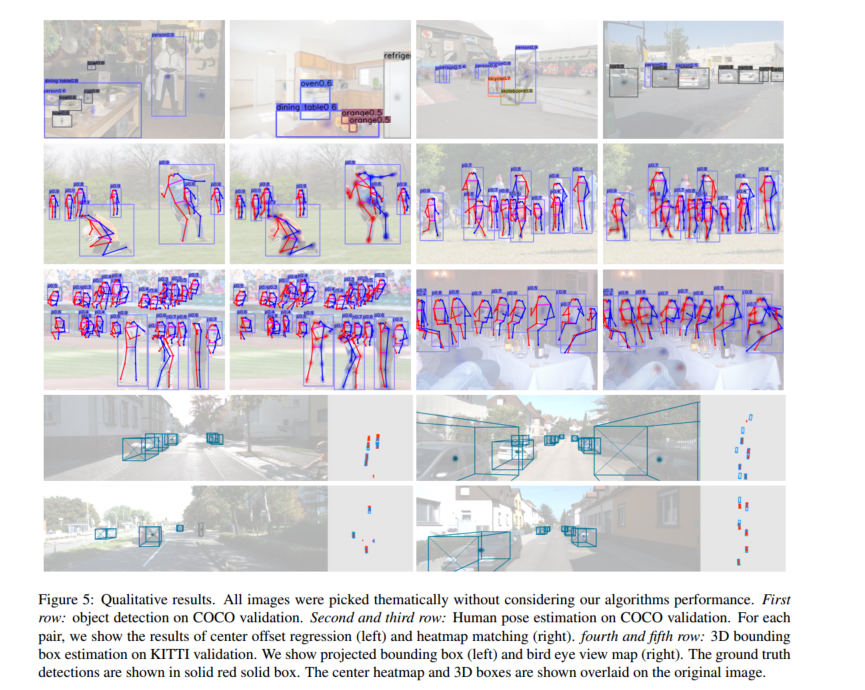
作为点的对象CenterNet论文阅读
摘要 检测器将图像中的物体表示为轴对齐的边界框。大多数成功的目标检测方法都会枚举几乎完整的潜在目标位置列表,并对每一个位置进行分类。这种做法既浪费又低效,并且需要额外的后处理。在本文中,我们采取了不同的方法。我们将物体建模为单…...