高翔【自动驾驶与机器人中的SLAM技术】学习笔记(十)高翔书中的细节:参考链接;卫星导航;ESKF
一、 参考链接

我认真查找了好多地方:结果在最后一页。

作者GITHUB链接如下:
https://github.com/gaoxiang12/slam_in_autonomous_driving
全书所有参考链接 :如下
1 https://www.sae.org/standards/content/j3016_202104
2 http://www.evinchina.com/articleshow-217.html
3 Arcgis: https://www.arcgis.com/
4 Autoware: https://github.com/autowarefoundation/autoware
5 工具地址见:https://github.com/hobu/mgrs
6 ÀEPFL雕像数据集:https://lgg.epfl.ch/statues_dataset.php
7 https://github.com/HKUST-Aerial-Robotics/A-LOAM
8 https://github.com/wh200720041/floam
二、卫星导航
全球卫星导航系统(Global Navigation Satellite System,GNSS),简称卫星导航。
GNSS 通过测量自身与地球周围各卫星的距离来确定自身的位置,而与卫星的距离主要是通过测量时间间隔来确定的。一个卫星信号从卫星上发出时,带有一个发送时间。而GNSS接收机接收到它时,又有一个接收时间。比较接收时间与卫星发送时间,就能估算各卫星离我们的距离。而各种 GNSS 和测量方法的主要差异,就是如何减少这个时间测量的误差。从这种角度来看,GNSS本质上可以看成一种高精度的授时系统。
目前,世界范围内,我们可以接收到的卫星信号主要来自四个系统:
- 美国的全球定位系统Global Positioning System,GPS )、
- 中国的北斗卫星导航系统(Beidou Navigation Satellite System,BDS)、
- 俄罗斯的格洛纳斯系统(GLONASS)、
- 欧盟的伽利略系统(GALILEO)。
对于自动驾驶车辆来说,最常用的卫星定位技术包括以下几种。
- 单点 GNSS 定位,即传统的米级精度卫星定位。这种定位方式价格低廉,应用广泛。大多数手机、车机等终端都具备单点卫星定位能力。在普通车辆的道路级导航中,单点定位的精度足以让驾驶人员辨认出车辆位于哪条道路,但在多条道路并排(车道级)时,它的精度又往往不足以区分车辆是在高速路上还是在辅路上,或者是在主路上还是在匝道上。
- RTK 定位。由于卫星定位信号在传输过程中可能产生误差,人们发展了差分定位技术,即通过地面上的一个已知精确位置的基站与车辆通信,校正车辆卫星接收机的信号。差分定位又可进一步分为位置、伪距及载波相位差分定位。其中最广泛使用的,是基于载波相位差分的 RTK 技术。RTK 通过与一个或多个基站进行通信,可以实时地获取校正后的卫星导航位置。
自动驾驶通常需要车道级导航而非道路级导航。车道级导航可以指出车辆位于道路当中哪个车道,比道路级导航更稳定。

世界坐标系
- 地理坐标系:经纬度
- UTM坐标系:米制坐标
GNSS代码:src/common/gnss.h
//
// Created by xiang on 2022/1/4.
//#ifndef SLAM_IN_AUTO_DRIVING_GNSS_H
#define SLAM_IN_AUTO_DRIVING_GNSS_H#include "common/eigen_types.h"
#include "common/message_def.h"namespace sad {/// GNSS状态位信息
/// 通常由GNSS厂商提供,这里使用千寻提供的状态位
enum class GpsStatusType {GNSS_FLOAT_SOLUTION = 5, // 浮点解(cm到dm之间)GNSS_FIXED_SOLUTION = 4, // 固定解(cm级)GNSS_PSEUDO_SOLUTION = 2, // 伪距差分解(分米级)GNSS_SINGLE_POINT_SOLUTION = 1, // 单点解(10m级)GNSS_NOT_EXIST = 0, // GPS无信号GNSS_OTHER = -1, // 其他
};/// UTM 坐标
struct UTMCoordinate {UTMCoordinate() = default;explicit UTMCoordinate(int zone, const Vec2d& xy = Vec2d::Zero(), bool north = true): zone_(zone), xy_(xy), north_(north) {}int zone_ = 0; // utm 区域Vec2d xy_ = Vec2d::Zero(); // utm xydouble z_ = 0; // z 高度(直接来自于gps)bool north_ = true; // 是否在北半球
};/// 一个GNSS读数结构
struct GNSS {GNSS() = default;GNSS(double unix_time, int status, const Vec3d& lat_lon_alt, double heading, bool heading_valid): unix_time_(unix_time), lat_lon_alt_(lat_lon_alt), heading_(heading), heading_valid_(heading_valid) {status_ = GpsStatusType(status);}/// 从ros的NavSatFix进行转换/// NOTE 这个只有位置信息而没有朝向信息,UTM坐标请从ch3的代码进行转换GNSS(sensor_msgs::NavSatFix::Ptr msg) {unix_time_ = msg->header.stamp.toSec();// 状态位if (int(msg->status.status) >= int(sensor_msgs::NavSatStatus::STATUS_FIX)) {status_ = GpsStatusType::GNSS_FIXED_SOLUTION;} else {status_ = GpsStatusType::GNSS_OTHER;}// 经纬度lat_lon_alt_ << msg->latitude, msg->longitude, msg->altitude;}double unix_time_ = 0; // unix系统时间GpsStatusType status_ = GpsStatusType::GNSS_NOT_EXIST; // GNSS 状态位Vec3d lat_lon_alt_ = Vec3d::Zero(); // 经度、纬度、高度,前二者单位为度double heading_ = 0.0; // 双天线读到的方位角,单位为度bool heading_valid_ = false; // 方位角是否有效UTMCoordinate utm_; // UTM 坐标(区域之类的也在内)bool utm_valid_ = false; // UTM 坐标是否已经计算(若经纬度给出错误数值,此处也为false)SE3 utm_pose_; // 用于后处理的6DoF Pose
};} // namespace sadusing GNSSPtr = std::shared_ptr<sad::GNSS>;#endif // SLAM_IN_AUTO_DRIVING_GNSS_H
给出了GNSS的状态枚举;以及UTM坐标的数据结构和GNSS的读数数据结构。
其中GNSS的数据结构与ros中的NavSatStatus消息可以转换。
注意GNSS中,有几个属性字段:一个是通过utm_convert转换之后的坐标。另一个是基于UTM坐标的6自由度pose。
antenna:天线
//
// Created by xiang on 2022/1/4.
//#include <glog/logging.h>
#include <iomanip>
#include <memory>#include "common/gnss.h"
#include "common/io_utils.h"
#include "tools/ui/pangolin_window.h"
#include "utm_convert.h"DEFINE_string(txt_path, "./data/ch3/10.txt", "数据文件路径");// 以下参数仅针对本书提供的数据
DEFINE_double(antenna_angle, 12.06, "RTK天线安装偏角(角度)");
DEFINE_double(antenna_pox_x, -0.17, "RTK天线安装偏移X");
DEFINE_double(antenna_pox_y, -0.20, "RTK天线安装偏移Y");
DEFINE_bool(with_ui, true, "是否显示图形界面");/*** 本程序演示如何处理GNSS数据* 我们将GNSS原始读数处理成能够进行后续处理的6自由度Pose* 需要处理UTM转换、RTK天线外参、坐标系转换三个步骤** 我们将结果保存在文件中,然后用python脚本进行可视化*/int main(int argc, char** argv) {google::InitGoogleLogging(argv[0]);FLAGS_stderrthreshold = google::INFO;FLAGS_colorlogtostderr = true;google::ParseCommandLineFlags(&argc, &argv, true);if (fLS::FLAGS_txt_path.empty()) {return -1;}sad::TxtIO io(fLS::FLAGS_txt_path);std::ofstream fout("./data/ch3/gnss_output.txt");Vec2d antenna_pos(FLAGS_antenna_pox_x, FLAGS_antenna_pox_y);auto save_result = [](std::ofstream& fout, double timestamp, const SE3& pose) {auto save_vec3 = [](std::ofstream& fout, const Vec3d& v) { fout << v[0] << " " << v[1] << " " << v[2] << " "; };auto save_quat = [](std::ofstream& fout, const Quatd& q) {fout << q.w() << " " << q.x() << " " << q.y() << " " << q.z() << " ";};fout << std::setprecision(18) << timestamp << " " << std::setprecision(9);save_vec3(fout, pose.translation());save_quat(fout, pose.unit_quaternion());fout << std::endl;};std::shared_ptr<sad::ui::PangolinWindow> ui = nullptr;if (FLAGS_with_ui) {ui = std::make_shared<sad::ui::PangolinWindow>();ui->Init();}bool first_gnss_set = false;Vec3d origin = Vec3d::Zero();io.SetGNSSProcessFunc([&](const sad::GNSS& gnss) {sad::GNSS gnss_out = gnss;if (sad::ConvertGps2UTM(gnss_out, antenna_pos, FLAGS_antenna_angle)) {if (!first_gnss_set) {origin = gnss_out.utm_pose_.translation();first_gnss_set = true;}/// 减掉一个原点gnss_out.utm_pose_.translation() -= origin;save_result(fout, gnss_out.unix_time_, gnss_out.utm_pose_);if (ui) {ui->UpdateNavState(sad::NavStated(gnss_out.unix_time_, gnss_out.utm_pose_.so3(), gnss_out.utm_pose_.translation()));usleep(1e3);}}}).Go();if (ui) {while (!ui->ShouldQuit()) {usleep(1e5);}ui->Quit();}return 0;
}正如代码注释中所写的:将txt中的GNSS数据读取,然后转换成UTM数据,基于天线外参,坐标转换为6自由度的pose。将pose记录gnss_out。最后用gnss_out转换成导航状态量NavStated类。
此处是从txt读取数据,真实应用更可能订阅某个ROS话题节点。
三、误差状态卡尔曼滤波器(Error State Kalman Filter,ESKF)
RTK 设备为我们提供了一个不太稳定的位姿观测源。我们可以将它视为定位滤波器的一种观测。本节将RTK与IMU 结合,使用拓展卡尔曼滤波器形成传统的组合导航算法,以供后续的算法对比。严格来说,笔者向读者介绍的是误差状态卡尔曼滤波器(Error State Kalman Filter,ESKF)。ESKF 的应用十分广泛,从GINS组合导航到视觉SLAM[58-60]、外参自标定[61-62]等任务中都有应用。
这里提到了一个外参自动标定。

- Visual-inertial sensor fusion: Localization, mapping and sensor-to-sensor self-calibration.
- A kalman flter-based algorithm for imu-camera calibration:Observability analysis and performance evaluation.
1、ESKF的数学推导演变
之前是把IMU视为观测模型。现在我们IMU视为运动模型,并把GNSS观测视为观测模型,推导整个滤波器。
状态估计问题嘛,先明确状态变量。
状态变量为:
所有变量都默认取下标,其中p为平移,v为速度,R为旋转,
为零偏,g为重力。
将IMU测量值带入公式3.1。状态变量在连续时间下的运动方程为公式3.22:
公式3.1:

公式3.22


直白点说:搞不定了,或者说不好搞了。得想个其他法子。
于是,能否避免直接使用x和P来表达状态的均值和协方差,推导运动和观察方程呢?能否使用原先卡尔曼滤波器中的更新量来推导这两个方程?
说直白点:状态量用x和P来表示均值和协方差,来推导运动方程和观察方程这个方式有困难推不动了,改用更新量来重新推导运动方程和观察方程。
回忆卡尔曼滤波器中的观测部分。咱们把运动方程和观察方程,以及“黄金五公式”一起回忆下。

在卡尔曼滤波器观测部分,我们看到在用卡尔曼增益更新状态时,(C和H看做等效)。
之前提到这个公式有大用,基于此可以做一些操作了。
在流形意义下,右侧的更新量(Updates Value)(CSDN富文本编辑模式下,公式不支持中文,此处用了Updates Value)。原文如下:

应是位于切空间中的矢量,中间的加法应为流形与切空间指数映射的广义加法。但也可以将更新量(或者称为误差状态)视为滤波器的状态变量,来推导运动和观测模型。
这就引出了误差状态卡尔曼滤波器。
到这意思就是说,对于我们的状态估计问题,我们要估计的状态变为了误差状态。
这个更新量:其实就是观测结果与递推预测结果的差异。
- A有一个数据,B有一个数据,真实数据应该是多少。
- 这俩数据之间的差异,通过其协方差(可信度)来分配更倾向于A还是B。
这个之前理解KF时提及过。如何分配这个差异。
- 矩阵H是从预测空间转换到观测空间的变换矩阵。
- Hx就将递推预测的数据转换到观测空间,
- 与观测数据进行比较。获取差异。
更进一步,不光是平移和旋转,把所有的状态都用误差状态来表达,这就是典型ESKF的做法。
ESKF是许多传统的、现代的系统里都广泛使用的状态估计方法,既可以作为组合导航的滤波器,也可以用来实现LIO、VIO 等复杂系统。
相比于传统KF,ESKF的优点可以总结如下:
- 在旋转的处理上,ESKF的状态变量可以采用最小化的参数表达,也就是使用三维变量来表达旋转的增量。该变量位于切空间中,而切空间是一个矢量空间。传统KF需要用到四元数(4维)或者更高维的变量来表达状态(旋转矩阵,9维),要不就得采用带有奇异性的表达方式(欧拉角)。
- ESKF总是在原点附近,离奇异点较远,数值方面更稳定,并且不会产生离工作点太远而导致线性化近似不够的问题。
- ESKF的状态量为小量,其二阶变量相对来说可以忽略。同时,大多数雅可比矩阵在小量
情况下变得非常简单,甚至可以用单位阵代替。 - 误差状态的运动学相比原状态变量更小(小量的运动学),因此可以把更新部分归入原状
态变量中。
个人理解哈:只考虑扰动模型的情况下,有各种好处。直白点:累计误差不会在更新中因累计放大而影响彼此。只考虑观察和预测的扰动模型即可。
在ESKF中,通常把原状态变量称为名义状态变量(Nominal State),把ESKF里的状态变量称为误差状态变量(Error State)。
<相关文章:
高翔【自动驾驶与机器人中的SLAM技术】学习笔记(十)高翔书中的细节:参考链接;卫星导航;ESKF
一、 参考链接 我认真查找了好多地方:结果在最后一页。 作者GITHUB链接如下: https://github.com/gaoxiang12/slam_in_autonomous_driving 全书所有参考链接 :如下 1 https://www.sae.org/standards/content/j3016_202104 2 http://www.evinchina.com/articleshow-217.htm…...

【在Python中爬取网页信息并存储】
在Python中爬取网页信息并存储的过程通常涉及几个关键步骤:发送HTTP请求、解析HTML内容、提取所需数据,以及将数据存储到适当的格式中(如文本文件、CSV文件、数据库等)。以下是一个更详细的指南,包括示例代码ÿ…...

ESP32 Bluedroid 篇(1)—— ibeacon 广播
前言 前面我们已经了解了 ESP32 的 BLE 整体架构,现在我们开始实际学习一下Bluedroid 从机篇的广播和扫描。本文将会以 ble_ibeacon demo 为例子进行讲解,需要注意的一点是。ibeacon 分为两个部分,一个是作为广播者,一个是作为观…...

【通配符】粗浅学习
1 背景说明 首先要注意,通配符中的符号和正则表达式中的特殊符号具备不同的匹配意义,例如:*在正则表达式中表示里面是指匹配前面的子表达式0次或者多次,而在通配符领域则是表示代表0个到无穷个任意字符。 此外,要注意…...

Spring MVC 常用注解
目录 基础概念 常用注解介绍 基础概念 1、MVC :代表一种软件架构设计思想,通俗的理解:客户端发送请求到后台服务器的Controller(C),控制器调用Model(M)来处理业务逻辑,处理完成后,返回处理后的数据到Vie…...

水泵模块(5V STM32)
目录 一、介绍 二、传感器原理 1.尺寸介绍 2.继电器控制水泵电路原理图 三、程序设计 main.c文件 bump.h文件 bump.c文件 四、实验效果 五、资料获取 项目分享 一、介绍 水泵模块(bump)通常是指用于液体输送系统的组件,它负责将水或其他流体从低处提…...

需求6:如何写一个后端接口?
这两天一直在对之前做的工作做梳理总结,不过前两天我都是在总结一些bug的问题。尽管有些bug问题我还没写文章,但是,我今天不得不先停下对bug的总结了。因为在国庆之后,我需要自己开发一个IT资产管理的功能,这个功能需要…...
:文件权限控制及文件操作相关的命令)
《Linux从小白到高手》理论篇(五):文件权限控制及文件操作相关的命令
本篇介绍Linux文件权限控制及文件操作相关的命令,看完本文,有关Linux文件权限控制及文件操作相关的常用命令你就掌握了99%了。 文件权限 在介绍文件权限之前先来复习下Linux的文件类型,始终记住那句话:Linux系统下,一…...
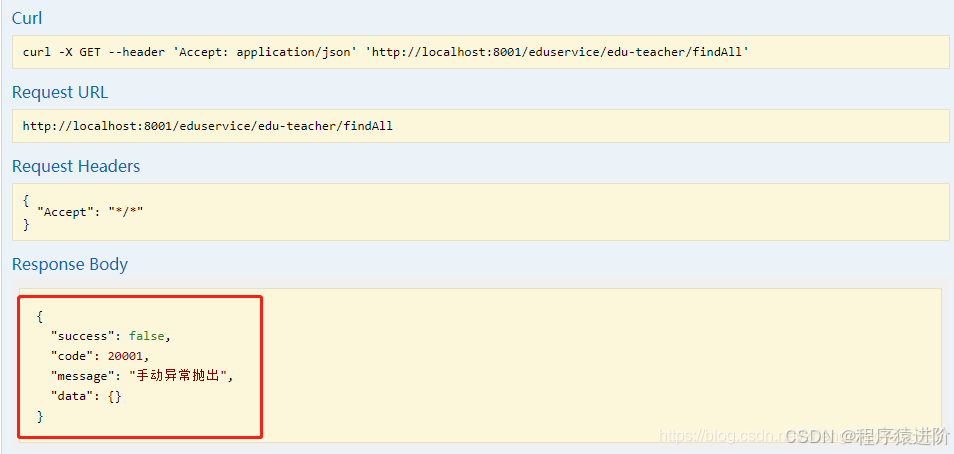
异常场景分析
优质博文:IT-BLOG-CN 为了防止黑客从前台异常信息,对系统进行攻击。同时,为了提高用户体验,我们都会都抛出的异常进行拦截处理。 一、异常处理类 Java把异常当做是破坏正常流程的一个事件,当事件发生后,…...

Leetcode: 0001-0010题速览
Leetcode: 0001-0010题速览 本文材料来自于LeetCode solutions in any programming language | 多种编程语言实现 LeetCode、《剑指 Offer(第 2 版)》、《程序员面试金典(第 6 版)》题解 遵从开源协议为知识共享 版权归属-相同方式…...
计算机的错误计算(一百一十二)
摘要 计算机的错误计算(六十三)与(六十八)以及(六十九)分别探讨了大数与 附近数以及 附近数 的余切函数的计算精度问题。本节讨论余切序列(即迭代 )的计算精度问题。 余切序列是指…...
C++基础(7)——STL简介及string类
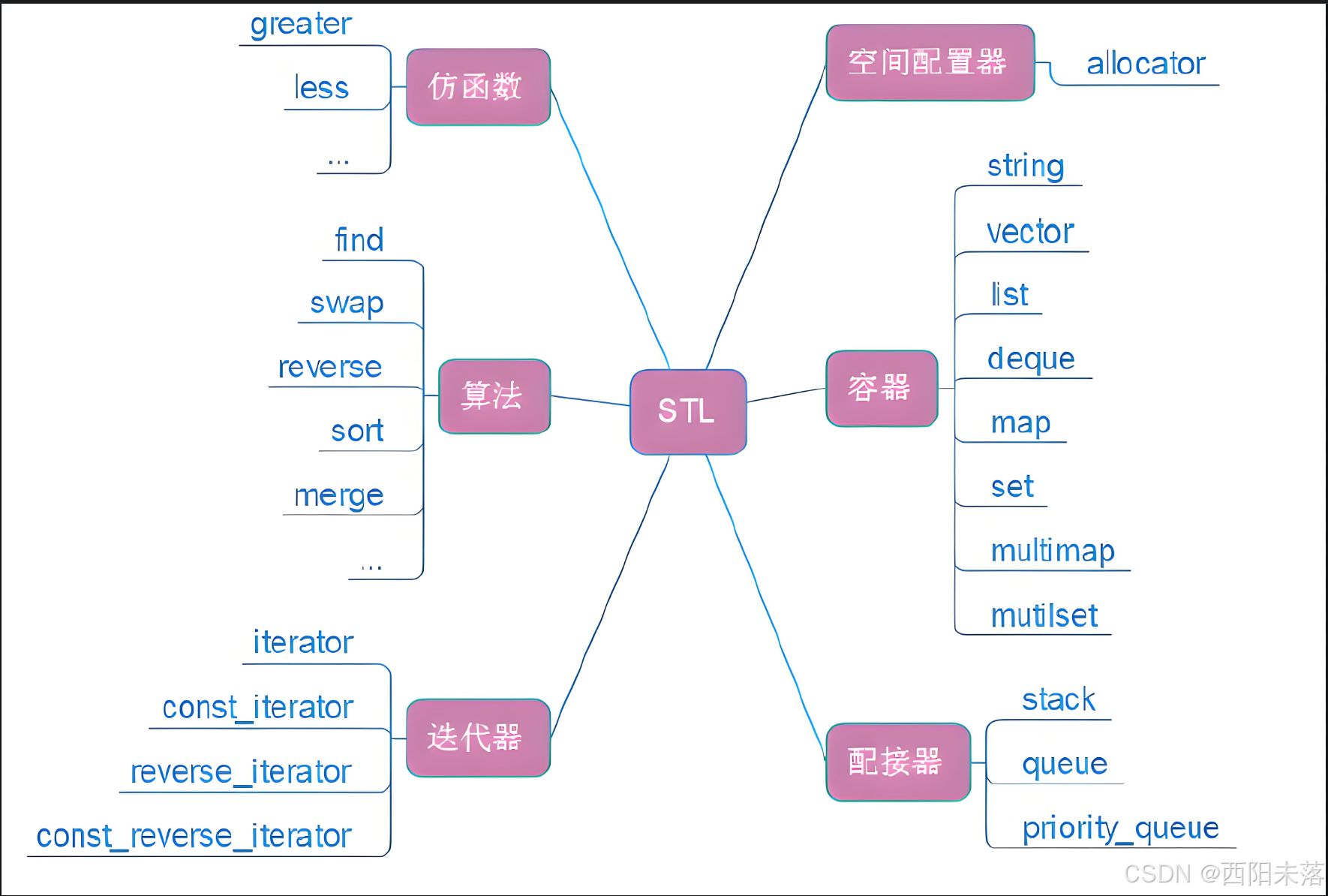
目录 1.STL简介 1.1什么是 1.2STL的历史版本 1.3STL的六大组件 编辑 1.4有用的网址 2.string类 2.1string的多种定义方式 2.2string的插入 2.2.1尾插(push_back) 2.2.2insert插入 2.3拼接(append) 2.4删除 2.4.1尾…...

配置Nginx以支持通过HTTPS回源到CDN
要配置Nginx以支持通过HTTPS回源到CDN,你需要确保Nginx已正确配置SSL,并且能够处理来自CDN的HTTPS请求。以下是一个简化的Nginx配置示例,它配置了SSL并设置了代理服务器参数以回源到CDN: server {listen 443 ssl;server_name you…...

yolov10+strongsort的目标跟踪实现
此次yolov10deepsort不论是准确率还是稳定性,再次超越了之前的yolodeepsort系列。 yolov10介绍——实时端到端物体检测 YOLOv10 是清华大学研究人员在 UltralyticsPython 清华大学的研究人员在 YOLOv10软件包的基础上,引入了一种新的实时目标检测…...
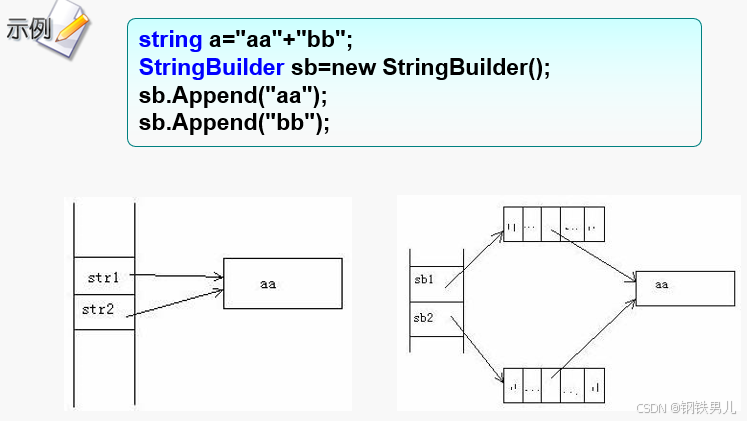
C# 字符与字符串
本课要点: 1、字符类Char的使用 2、字符串类String的使用 3、可变字符串****StringBuilder 4、常见错误 一 何时用到字符与字符串 问题: 输出C#**课考试最高分:**98.5 输出最高分学生姓名:张三 输出最高分学生性别&#x…...

在Ubuntu 16.04上使用LEMP安装WordPress的方法
前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。 简介 WordPress 是互联网上最流行的 CMS(内容管理系统)。它允许您在 MySQL 后端和 PHP 处理的基础上轻松设置灵…...

显示器放大后,大漠识图识色坐标偏移解决方法
原因分析: 显示器分辨率较高,DPI设置放大125% or 150% or 200%,游戏打开时也会默认会根据显示器的放大比例自行放大,但是大漠综合管理工具抓图不会放大; 解决方法: 1、大漠综合管理…...
C++容器之list基本使用
目录 前言 一、list的介绍? 二、使用 1.list的构造 2.list iterator的使用 3.list capacity 🥇 empty 🥇size 4.list element access 🥇 front 🥇 back 5.list modifiers 🥇 push_front 🥇 po…...

Redis-哨兵
概念 Redis Sentinel 相关名词解释 注意: 哨兵机制不负责存储数据,只是对其它的redis-server进程起到监控的作用哨兵节点,也会搞一个集合,防止一个挂了 ⼈⼯恢复主节点故障 用户监控: 实际开发中,对于服务器后端开发,监控程序,是很重要的 服务器长期运行,总会有一些意外,…...
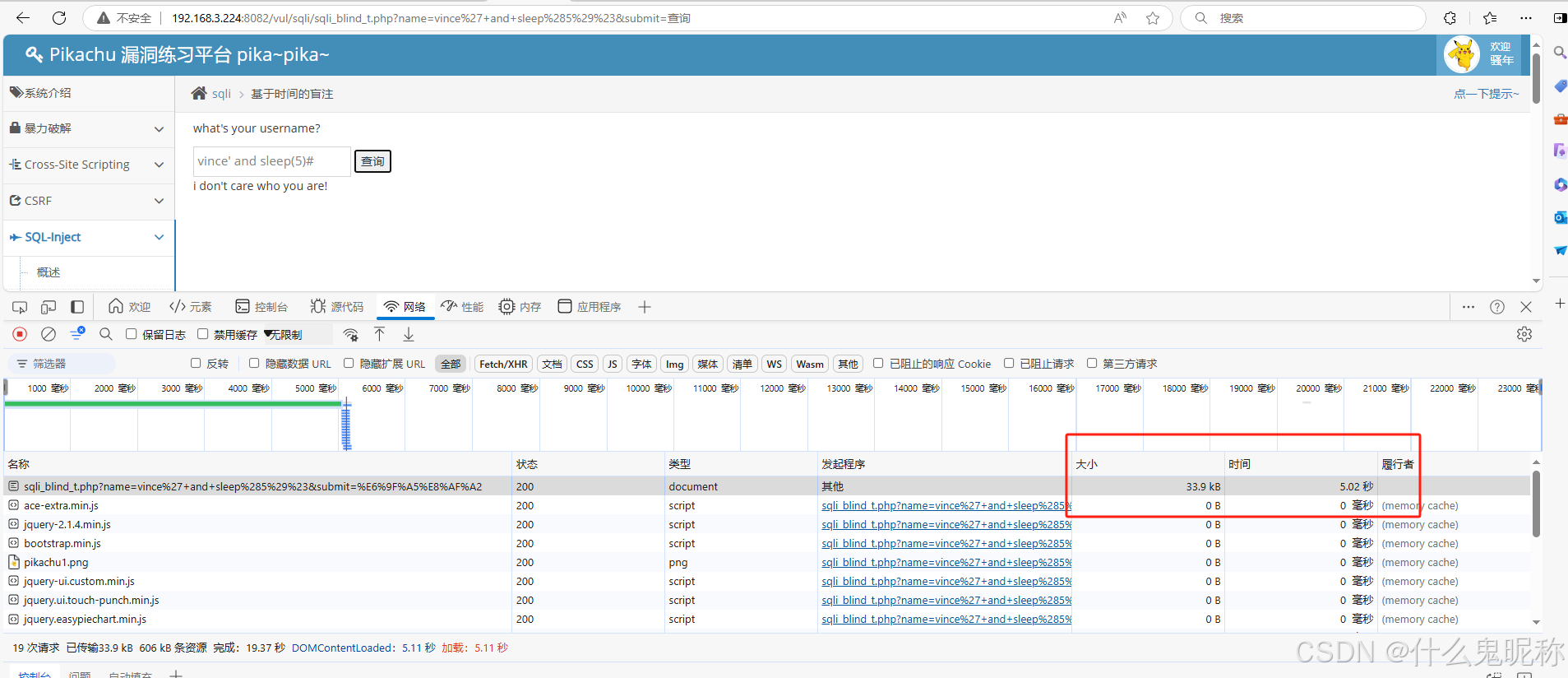
Pikachu-Sql-Inject - 基于时间的盲注
基于时间的盲注: 就是前端的基于time 的盲注,什么错误信息都看不到,但是还可以通过特定的输入,判断后台的执行时间,从而确定注入。 mysql 里函数sleep() 是延时的意思,sleep(10)就是数据库延时10 秒返回内…...
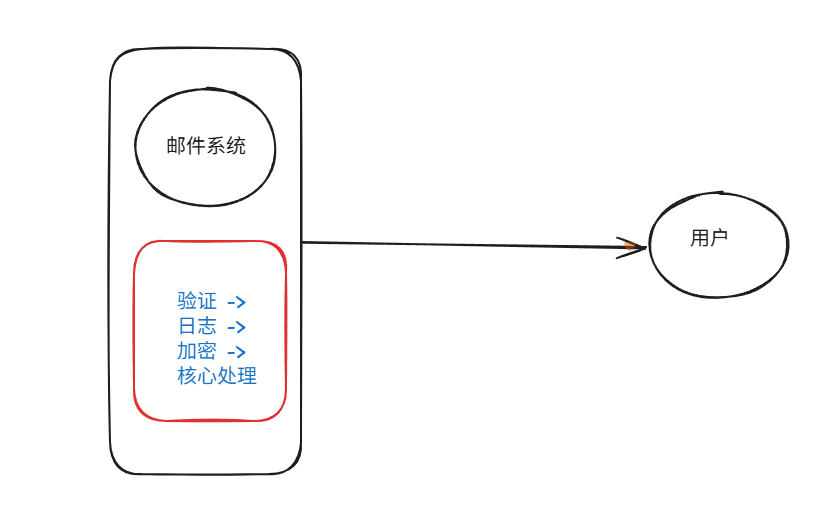
装饰模式(Decorator Pattern)重构java邮件发奖系统实战
前言 现在我们有个如下的需求,设计一个邮件发奖的小系统, 需求 1.数据验证 → 2. 敏感信息加密 → 3. 日志记录 → 4. 实际发送邮件 装饰器模式(Decorator Pattern)允许向一个现有的对象添加新的功能,同时又不改变其…...
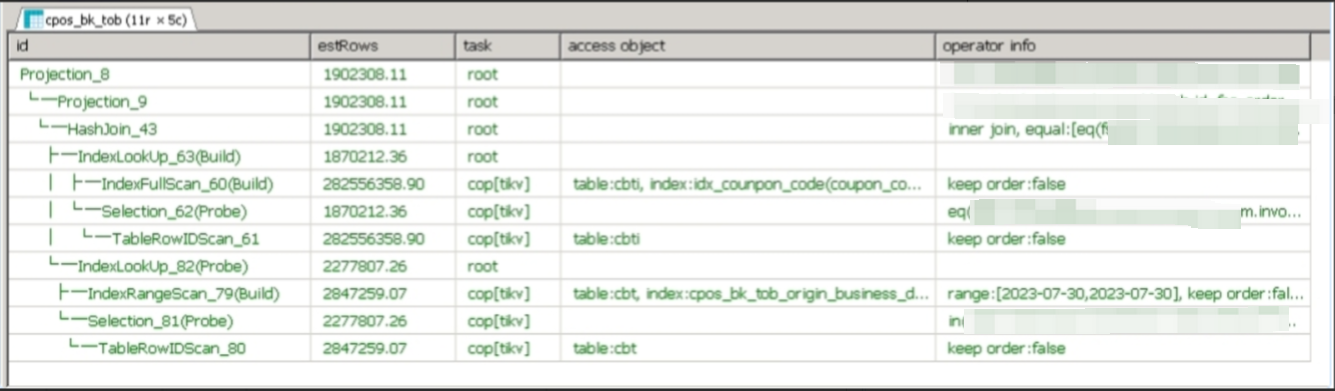
【入坑系列】TiDB 强制索引在不同库下不生效问题
文章目录 背景SQL 优化情况线上SQL运行情况分析怀疑1:执行计划绑定问题?尝试:SHOW WARNINGS 查看警告探索 TiDB 的 USE_INDEX 写法Hint 不生效问题排查解决参考背景 项目中使用 TiDB 数据库,并对 SQL 进行优化了,添加了强制索引。 UAT 环境已经生效,但 PROD 环境强制索…...
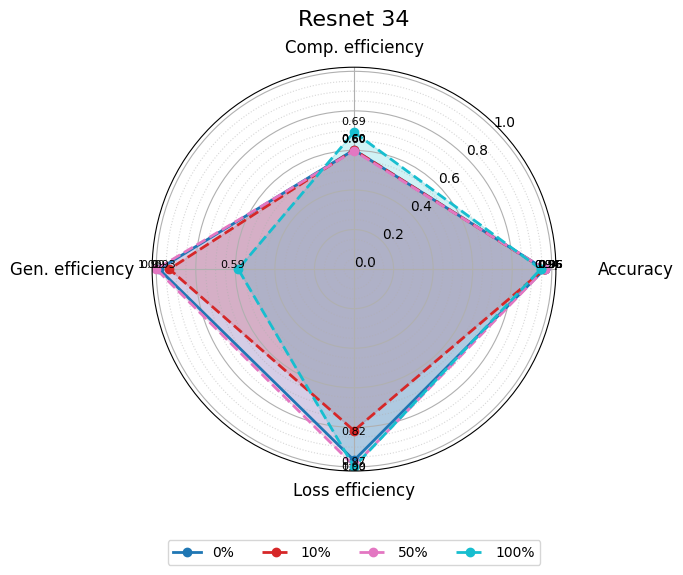
使用分级同态加密防御梯度泄漏
抽象 联邦学习 (FL) 支持跨分布式客户端进行协作模型训练,而无需共享原始数据,这使其成为在互联和自动驾驶汽车 (CAV) 等领域保护隐私的机器学习的一种很有前途的方法。然而,最近的研究表明&…...
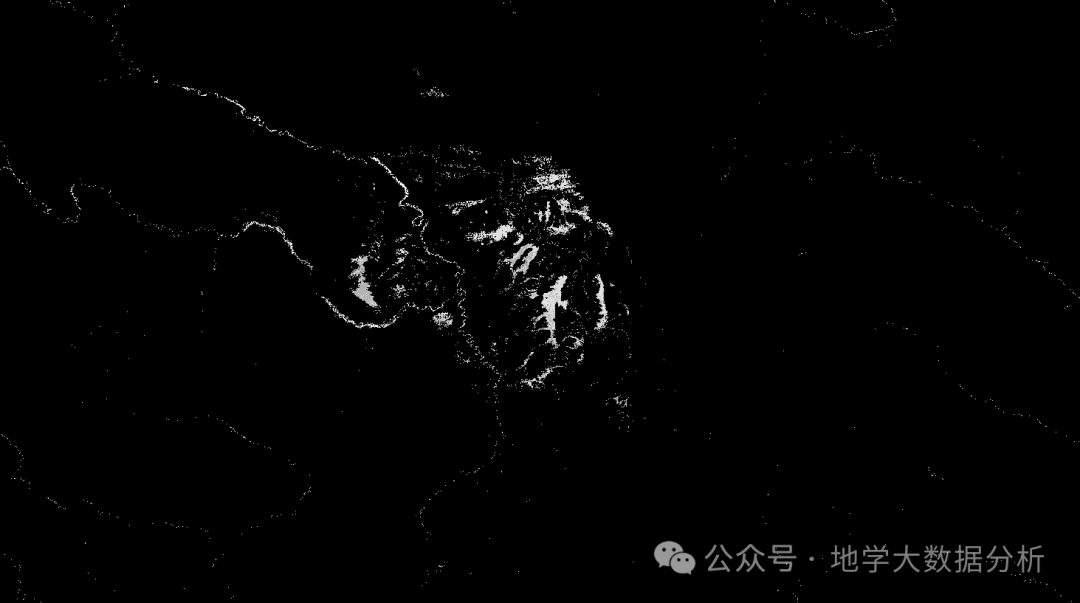
全球首个30米分辨率湿地数据集(2000—2022)
数据简介 今天我们分享的数据是全球30米分辨率湿地数据集,包含8种湿地亚类,该数据以0.5X0.5的瓦片存储,我们整理了所有属于中国的瓦片名称与其对应省份,方便大家研究使用。 该数据集作为全球首个30米分辨率、覆盖2000–2022年时间…...

2021-03-15 iview一些问题
1.iview 在使用tree组件时,发现没有set类的方法,只有get,那么要改变tree值,只能遍历treeData,递归修改treeData的checked,发现无法更改,原因在于check模式下,子元素的勾选状态跟父节…...
Map相关知识
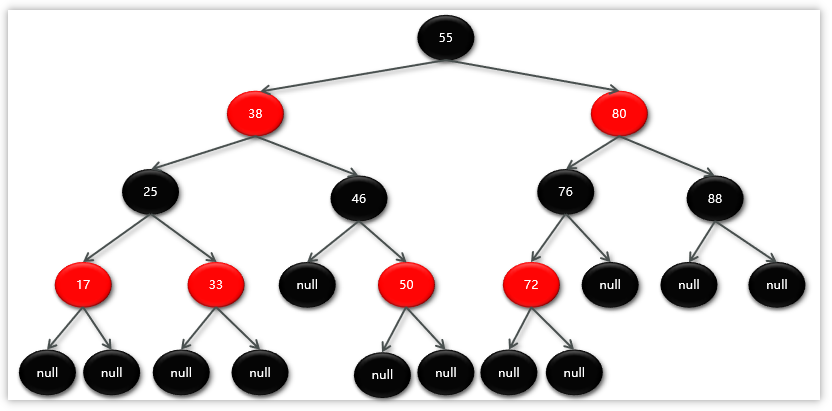
数据结构 二叉树 二叉树,顾名思义,每个节点最多有两个“叉”,也就是两个子节点,分别是左子 节点和右子节点。不过,二叉树并不要求每个节点都有两个子节点,有的节点只 有左子节点,有的节点只有…...

OPENCV形态学基础之二腐蚀
一.腐蚀的原理 (图1) 数学表达式:dst(x,y) erode(src(x,y)) min(x,y)src(xx,yy) 腐蚀也是图像形态学的基本功能之一,腐蚀跟膨胀属于反向操作,膨胀是把图像图像变大,而腐蚀就是把图像变小。腐蚀后的图像变小变暗淡。 腐蚀…...
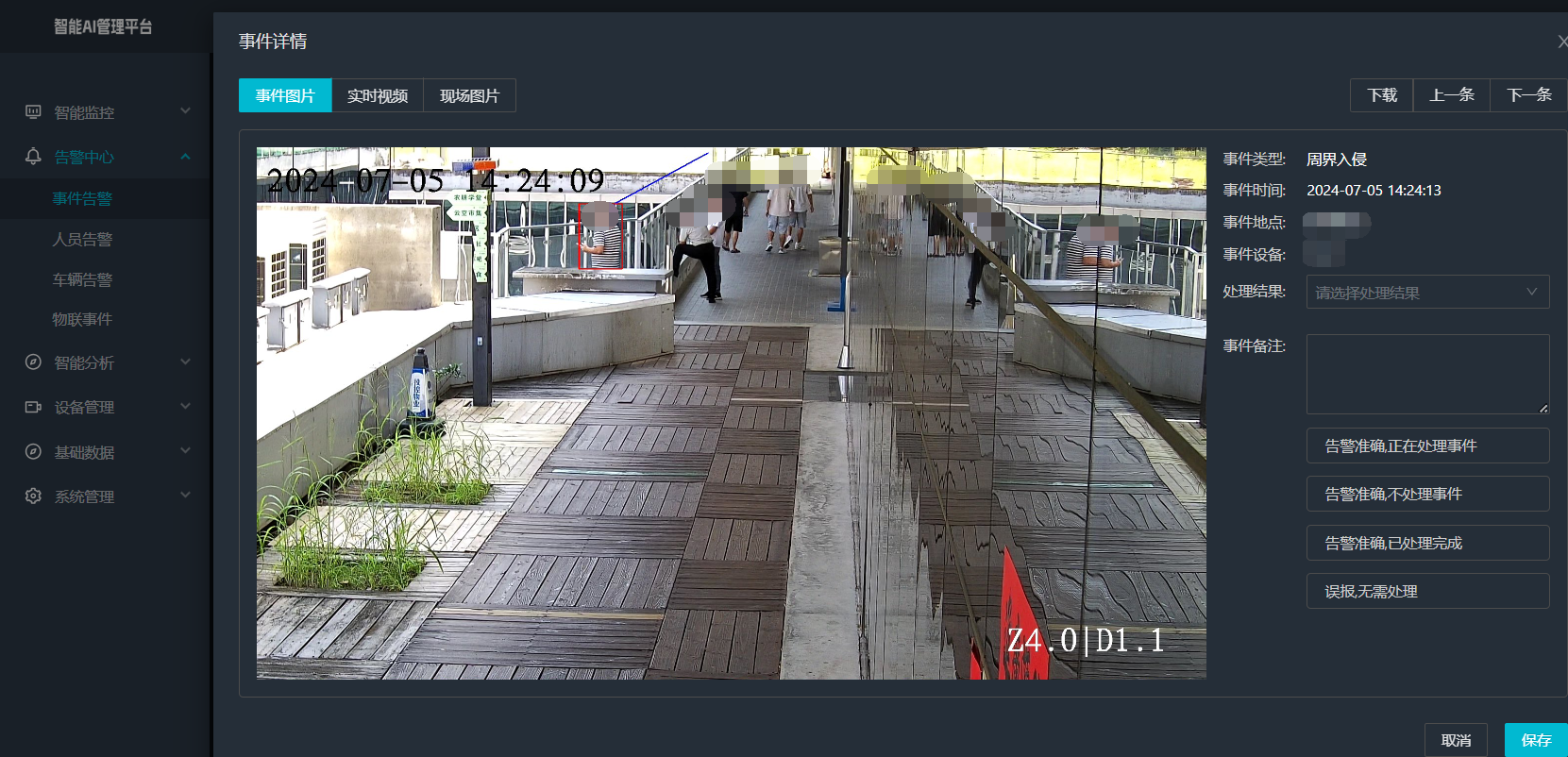
打手机检测算法AI智能分析网关V4守护公共/工业/医疗等多场景安全应用
一、方案背景 在现代生产与生活场景中,如工厂高危作业区、医院手术室、公共场景等,人员违规打手机的行为潜藏着巨大风险。传统依靠人工巡查的监管方式,存在效率低、覆盖面不足、判断主观性强等问题,难以满足对人员打手机行为精…...

Oracle11g安装包
Oracle 11g安装包 适用于windows系统,64位 下载路径 oracle 11g 安装包...

go 里面的指针
指针 在 Go 中,指针(pointer)是一个变量的内存地址,就像 C 语言那样: a : 10 p : &a // p 是一个指向 a 的指针 fmt.Println(*p) // 输出 10,通过指针解引用• &a 表示获取变量 a 的地址 p 表示…...