非接触式竖向位移、水平位移视频实时在线监测的设备分类及选型
前言
视觉是人工智能正在快速发展的一个分支,简单说来,机器视觉就是用机器代替人眼来做测量和判断。在结构健康自动化监测方面,机器视觉采用光学图像结合智能算法和物联网技术,利用先进的智能靶标识别及亚像素处理等技术,实现了前端高精度多点表面位移测量,并通过物联网实现数据云端一体化。可用于桥梁、隧道、边坡、水库大坝、基坑、轨道、建筑物、地质灾害、矿山等表面位移(水平位移、沉降、动静挠度)的自动化监测。
一、工作原理
结构健康监测领域的机器视觉位移监测仪是一种基于机器视觉技术的非接触式测量设备,用于监测结构物在受力或环境因素作用下的变形和位移情况。
测量原理:在被测物表面安装测量靶标,机器视觉相机抓拍靶标成像,机器视觉识别出靶标的亚像素图像位移,自标定矩阵算法将图像位移转换到物理空间位移,得到靶标的实际位移,网络上传到云平台实现结构位移的非接触式测量。

二、机器视觉的分类
①按相机镜头分类可分为:变焦机器视觉和定焦机器视觉。
②按靶标的供电分类可分为:有源靶标和无源靶标。
③按靶标的识别可分为:人工框选识别靶标和机器自动识别靶标
三、机器视觉的类型和区别
3.1 相机镜头分类
机器视觉位移测量产品可以理解为一台工业相机、工控机和路由器等组成的微型电脑,其中工业相机是最重要的部分,是机器视觉的眼睛,是用来获取结构的位移信息变化。变焦机器视觉和定焦机器视觉的区别主要有以下几点:
①技术原理:变焦机器视觉位移监测采用自动变焦扫描技术,结合高倍变焦镜头和自动精准聚焦系统,能够获取每个靶标的清晰图像,并巡回扫描识别上千个靶标。而定焦机器视觉位移监测则采用焦距固定的镜头,通过固定拍摄距离和视角来获取清晰的图像,出厂定制镜头焦距(焦距越长,视野越窄),后期无法调整视野的大小以及测点的变化。

(图:不同焦距镜头的视野范围)
②应用范围:由于变焦机器视觉位移监测具有较大的测量范围、视野开阔、视场角较大和较高的数据精度,因此适用于大型结构如桥梁、隧道等长条形结构的位移监测,可以测量大范围、多目标位移。而定焦机器视觉位移监测出厂定制的镜头可能在现场不适用或者部分测点看不到,视场角较小,后续别的项目距离不同可能不适用。定焦更侧重于小型项目的应用场景,如小基坑、小型边坡等测量目标较少的项目。

(图:变焦视觉远近视野均可看清)
③灵活性:变焦机器视觉位移监测具有更大的灵活性,能够适应不同的拍摄距离和视角,通过自动变焦和扫描技术实现对多个目标的监测,而且灵活变焦的镜头可以用到不同的项目,达到重复利用。而定焦机器视觉位移监测则需要根据具体的拍摄距离和视角选择合适的镜头,相对较为固定。
④频率和稳定性:虽然变焦机器视觉位移监测具有较高的数据精度,但由于其采用自动变焦和扫描技术,可能会受到镜头变焦过程的影响,导致监测频率和稳定性会相对较低。而定焦机器视觉位移监测由于采用焦距固定的镜头,成像质量较为稳定,因此在一定程度上具有较高的频率和稳定性。
3.2靶标供电的分类
靶标是机器视觉监测结构位移信息的载体,靶标的清晰度直接影响了机器视觉测出来的精度。主要在供电需求、应用场景、识别效果和精度以及成本等方面存在明显的区别。
首先,有源靶标是靶标自发光,需要供电,而无源靶标则不需要,但需要在主机安装补光灯。这意味着有源靶标需要通过布线等方式进行供电,而无源靶标则无需进行供电布线,从而省去了现场布线的麻烦,安装更加高效方便。因此,无源靶标特别适用于一些无市电的场景,如边坡、地质灾害、矿山等。
其次,有源靶标和无源靶标在应用场景上也有所不同。有源靶标适合距离较远、环境恶劣的使用场景,灯光光线过滤会相对好一点,而无源靶标因为补光灯焦距有限,更适用于一些近距离、环境相对较好的场景。

此外两者监测精度其实差距不大,而且有源成本会相应高一些。所以一般都会选择无源靶标,到无源靶标也面临一个问题,补光灯焦距有限,照射到不同距离的靶标需增加多个补光灯。但最近安锐测控通过自研技术解决了这个问题,采用新一代夜视技术,不同距离的无源靶标均可照亮,关键还不用增设补光灯。大大的增加了无源靶标的优势及简便性。
最后在选择时,应根据具体需求和场景进行综合考虑,选择适合的靶标类型。
3.3 靶标的识别的分类
机器视觉位移监测仪的靶标自动识别与手动框选识别在识别方式、效率和精度等方面存在明显的区别。
首先,自动识别功能是指机器视觉位移监测仪能够自动检测并识别图像中的靶标,而无需人工干预和现场电脑调试。这种识别方式基于图像处理和机器学习算法,通过自动扫描和匹配图像中的特征点,实现对靶标的快速、准确识别。自动识别功能可以大大提高位移监测的效率和自动化程度,减少人工操作错误和人为干预的影响。

(图:机器自动识别靶标)
而手动框选识别则需要人工参与,操作人员需要通过鼠标或其他输入设备,在图像中手动框选出靶标的位置和范围。这种识别方式相对较慢,效率较低,而且容易受到人为因素的影响,如操作人员的经验、视觉疲劳等。

(图:手动框选靶标)
其次,在精度方面,自动识别功能通常具有较高的识别精度和稳定性。由于自动识别算法是基于大量的图像数据和机器学习算法进行训练的,因此可以实现对靶标的精确匹配和识别。而手动框选识别则可能受到操作人员的主观因素和视觉误差的影响,导致识别精度相对较低。
再者,因为已经框出监测选区,所以靶标的位置受限,只能监测靶标在框里的位移,移出框外将无法识别。
此外,在实际应用中,自动识别功能还可以实现多目标、多场景的快速识别和监测,适应性强,可以大大提高位移监测的效率和准确性。而手动框选识别则可能无法满足这种需求,特别是在需要实时监测和大量数据处理的应用场景中,每个靶标都需要人工框选,调试量大,一般需要安装几天才调试完,测点多的话可能一星期。
所以在实际应用中,应根据具体需求和场景选择适合的识别方式,以提高位移监测的效率和准确性。
相关文章:
非接触式竖向位移、水平位移视频实时在线监测的设备分类及选型
前言 视觉是人工智能正在快速发展的一个分支,简单说来,机器视觉就是用机器代替人眼来做测量和判断。在结构健康自动化监测方面,机器视觉采用光学图像结合智能算法和物联网技术,利用先进的智能靶标识别及亚像素处理等技术ÿ…...

Svelte 5 正式发布:新一代前端框架!
10 月 22 日,Svelte 5 正式发布!该版本带来的更新主要包括: 重写框架:Svelte 5 是从头开始重写的,使得应用更快、更小、更可靠,并且代码更一致和符合习惯。 向后兼容:Svelte 5 几乎完全向后兼容…...
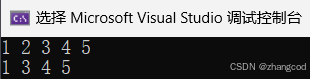
85.【C语言】数据结构之顺序表的中间插入和删除及遍历查找
目录 3.操作顺序表 1.分析中间插入函数 函数的参数 代码示例 图片分析 main.c部分改为 在SeqList.h添加SLInsert函数的声明 运行结果 2.分析中间删除函数 函数的参数 代码示例 图片分析 main.c部分改为 在SeqList.h添加SLErase函数的声明 运行结果 承接84.【C语…...

触觉智能Purple Pi OH鸿蒙开发板成功适配OpenHarmony5.0 Release,开启新征程!
10月22日,触觉智能Purple Pi OH鸿蒙开发板迎来了重大系统版本升级,成功适配OpenHarmony5.0 Release,为嵌入式开发者和科技爱好者们带来了全新的机遇与挑战! 触觉智能 Purple Pi OH 开发板一直以来都以其高品质和超高性价比而著称。…...

分布式解决方案---分布式ID
目录 是什么 特点 全局唯一 高并发 高可用 怎么做 实现方案 是什么 分布式ID是指在分布式系统中生成的唯一标识符。由于分布式系统的特点,多个节点可能会同时生成ID,因此需要确保每个ID在整个系统中是唯一的。 重点就是唯一性!&#x…...

httpd服务
文章目录 1、搭建一个网络yum源2、基于域名访问的虚拟主机3、基于端口来访问域名4、搭建个人网站5、加密访问显示自定义网页内容 1、搭建一个网络yum源 [roottest01 conf.d]# cat repo.conf <virtualhost *:80>documentroot /var/www/html/ServerName 10.104.43.154ali…...
Linux系统安装Redis详细操作步骤(二进制发布包安装方式)
安装方式介绍 在Linux系统中,安装软件的方式主要有四种,这四种安装方式的特点如下: 安装方式特点二进制发布包安装软件已经针对具体平台编译打包发布,只要解压,修改配置即可rpm安装软件已经按照redhat的包管理规范进…...
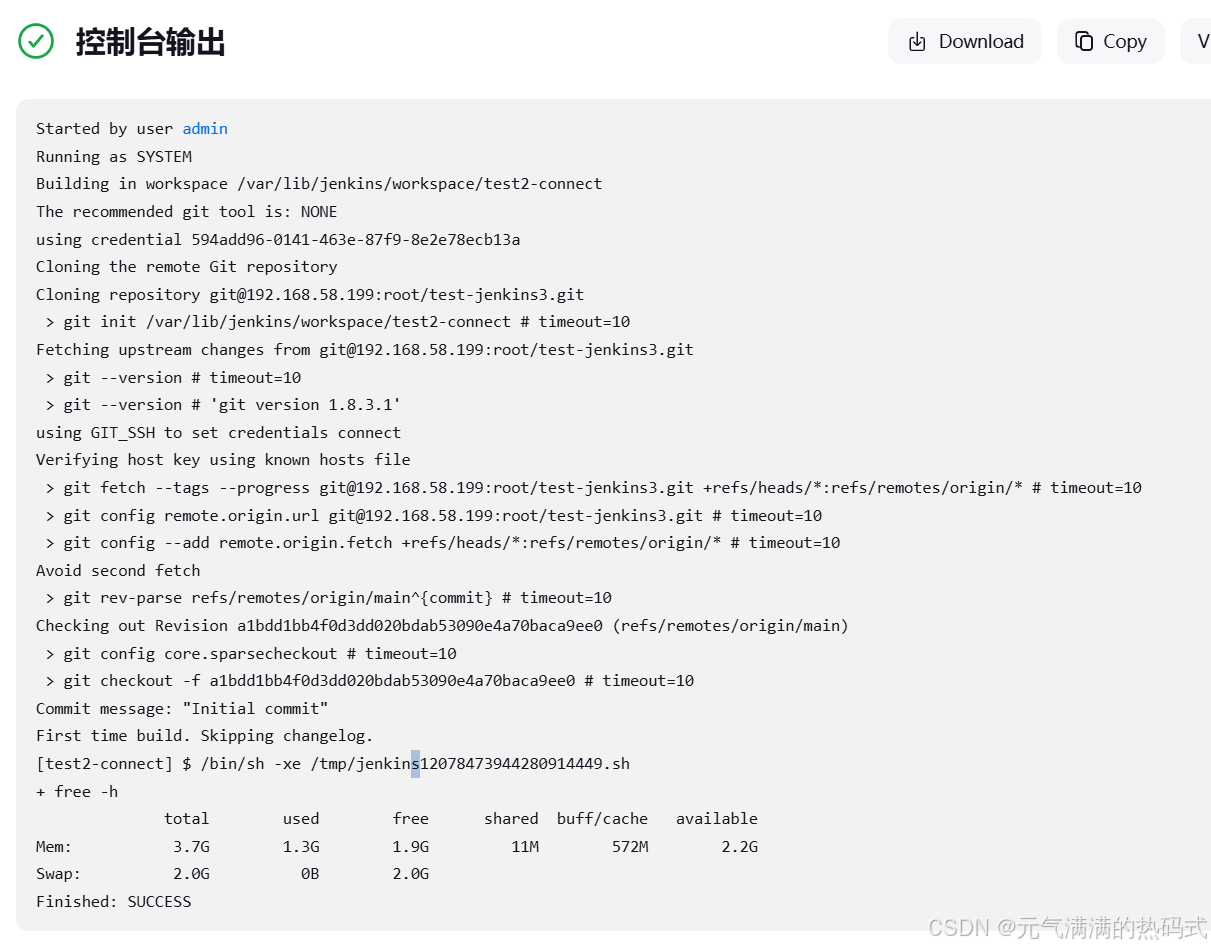
Jenkins和Gitlab整合构建CI/CD流水线
配置环境 虚拟机建议4G起步 192.168.58.199 192.168.58.200 部署Jenkins 部署Jenkins参考这篇文章:Jenkins安装部署_connecting to pkg.jenkins.io (pkg.jenkins.io)|151.-CSDN博客 安装完毕之后根据下图操作 选择git,添加git仓库克隆url,选…...

14 C语言中的关键字
C语言中的关键字 在C语言中,关键字是一些预定义的单词,它们具有特殊的意义和用途。这些关键字不能用作标识符,比如变量名、函数名等,因为它们被保留用于特定的语言结构和操作。 关键字的分类 C语言的关键字可以分为几个主要类别…...

(11)(2.1.7) FETtec OneWire ESCs(一)
文章目录 前言 1 去哪里买 2 连接 3 组态 前言 !Note 此功能在固件版本 4.1.1 及更高版本上可用。 OneWire 是 FETtec 的 ESC 双向通信协议(ESC bi-directional communication protocol)。 FETtec OneWire ESC 的遥测信息被发送回自动驾驶仪: 电…...

Python 异步编程:使用 `asyncio.to_thread` 和 `asyncio.Queue` 处理任务队列
Python 异步编程:使用 asyncio.to_thread 和 asyncio.Queue 处理任务队列 1. 什么是 asyncio.to_thread?2. 什么是 asyncio.Queue?3. 示例代码:使用 asyncio.to_thread 和 asyncio.Queue 处理任务队列示例代码代码解释运行结果 4.…...
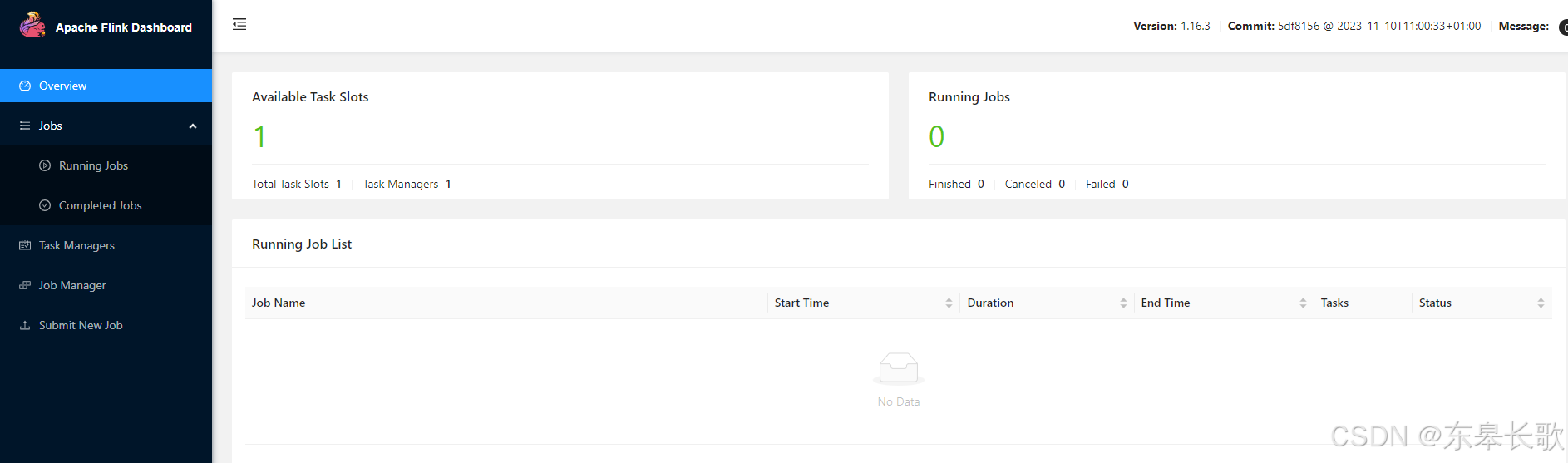
【问题解决】Flink在linux上运行成功但是无法访问webUI界面
一,问题 在搭建Flink的时候,已经在linux服务器上运行了./start-cluster.sh, 而且日志显示已经成功了。 服务器上也没有开启防火墙 正常来说应该能通过ip:8081来访问(8081是Flink WebUI的默认端口),但是访问的时候,显示…...

【问题解决】pnpm : 无法将“pnpm”项识别为 cmdlet、函数、脚本文件或可运行程序的名称。
今天配置完poetry环境变量之后pnpm不能用了 具体报错 pnpm : 无法将“pnpm”项识别为 cmdlet、函数、脚本文件或可运行程序的名称。请检查名称的拼写,如果包括路径,请确保路径正确,然后再试一次。 所在位置 行:1 字符: 1pnpm run dev~~~~ Ca…...
微信网页授权回调地址放多个参数的方法
https://open.weixin.qq.com/connect/oauth2/authorize?appidAPPID&redirect_uriREDIRECT_URI&response_typecode&scopeSCOPE&stateSTATE#wechat_redirect 跳转后地址 redirect_uri/?codeCODE&stateSTATE。 redirect_uri如果不进行urlencode编码, 跳转后…...

相机工作距离计算
镜头 基础参数 焦距 例如,使用1英寸靶面(12.8mm x 9.6mm)的相机,工作距离WD是300mm,视野FOV的高度是120mm,那么光学放大倍率𝛽 9.6𝑚𝑚/120𝑚𝑚0.08 ,…...

Pandas模块之垂直或水平交错条形图
目录 df.plot() 函数Pandas模块之垂直条形图Pandas模块之水平交错条形图 df.plot() 函数 df.plot() 是 Pandas 中的一个函数,用于绘制数据框中的数据。它是基于 Matplotlib 库构建的,可以轻松地创建各种类型的图表,包括折线图、柱状图、散点…...
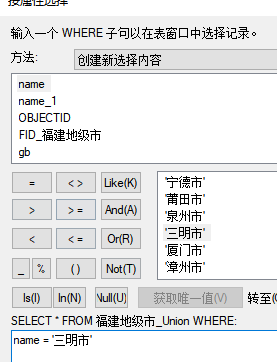
ArcGIS必会的选择要素方法(AND、OR、R、IN等)位置选择等
今天来看看ArcGIS中的几个选择的重要使用方法 1、常规选择、 2、模糊查询、 3、组合复合条件查询(AND、OR、IN), 4、空值NULL查询 5、位置选择 推荐学习: 以梦为马,超过万名学员学习ArcGIS入门到实战的应用课程…...

快速创建一个微信小程序,详细步骤以及示范程序代码
创建一个微信小程序涉及前端和后端的搭建与联调。以下是一个快速创建微信小程序的详细步骤以及示范程序代码。 一、注册微信小程序账号 前往微信公众平台,注册一个小程序账号并完成相关设置。注册完成后,获取小程序的AppID,这是后续开发过程…...

【继承】讲解
访问控制 传递下去可以一共分为四个特性 公有保护私有存在但不可见 虽然它们各自的特性不同,能不能使用也另说,但是在建立类对象的时候,系统都会申请相应的内存,也就是说,无论它们能不能用,它们都存在。 …...

无人机之低空管控技术
无人机的低空管控技术是对低空飞行活动进行管理和控制的一系列措施和技术的总称,旨在确保低空飞行活动的安全、有序和高效。 一、主要技术手段 雷达系统监测 原理:雷达是利用电磁波探测目标的电子设备,通过发射电磁波对目标进行照射并接收…...

SparkFun ICM-20948 Arduino库:DMP硬件协处理器深度实践指南
1. 项目概述SparkFun ICM-20948 Arduino Library 是面向 TDK InvenSense ICM-20948 九轴惯性测量单元(9DoF IMU)的官方 Arduino 封装库,专为 SparkFun 9DoF IMU Breakout - ICM-20948(Qwiic 接口版本,型号 SEN-15335&a…...
)
R语言新手必看:如何用pkgbuild和Sys.which检查并安装Rtools(附绑定教程)
R语言开发环境配置全指南:从Rtools安装到编译环境搭建 刚接触R语言的开发者,在尝试从源代码编译安装某些扩展包时,常常会遇到"make not found"之类的错误提示。这通常意味着系统缺少必要的编译工具链。本文将详细介绍如何在Windows…...

高密度PCB贴装实战:如何用模块化治具解决0.3mm间距元件定位难题
高密度PCB贴装实战:模块化治具在0.3mm间距元件定位中的创新应用 当智能手表的PCB板面积缩小到指甲盖大小时,上面的0402元件间距已经突破0.3mm极限——这相当于在1元硬币上精准摆放50根头发丝。消费电子微型化浪潮下,传统治具的定位误差正在吞…...

直流GIL绝缘子表面电荷积聚的电热耦合机理与电场畸变特性研究
中国电机工程学报文献复现 关于comsol GIL仿真模型:基于电热多物理场耦合模型的直流GIL 绝缘子表面电荷积聚及其对沿面电场影响的研究上周啃完那篇中国电机工程学报的直流GIL绝缘子仿真论文,本来以为照着公式套就能搞定,结果在Comsol里卡了整…...

【YOLOv11工业级实战】35. DeepStream集成实战——构建高并发视频分析管道
摘要:在智慧交通、智慧工地等工业场景中,多路高清视频的实时分析面临高并发、低延迟、低资源占用的核心诉求。传统PyTorch逐帧推理方案因CPU解码瓶颈、内存拷贝频繁等问题,无法满足500路以上视频流的并发处理需求。本文以NVIDIA DeepStream框架为核心,结合YOLOv11目标检测模…...

ai辅助开发:让快马平台为你的arduino项目注入智能决策与学习能力
AI辅助开发:让快马平台为你的Arduino项目注入智能决策与学习能力 最近在做一个智能垃圾分类的小项目,用Arduino控制各种传感器和舵机来实现自动分类。这个过程中发现,手动编写所有判断逻辑和阈值调整特别耗时,于是尝试用InsCode(…...

OpenClaw 全面解析:Token时代的iPhone如何颠覆开发者工作流?
前言:两周15万Star背后的技术革命 2026年初,一个名为 OpenClaw 的开源项目在 GitHub 上以惊人速度走红——两周内突破 15 万 Star,如今已达 310k Star,成为近年来增速最快的开源项目之一。 黄仁勋在最新访谈中将其称为 “Token时代…...

深入解析:高级 Android 开发工程师职位与面试全攻略
引言:移动互联网时代的核心力量 在当今移动互联网蓬勃发展的时代,智能手机已成为人们日常生活中不可或缺的一部分。作为连接用户与数字服务的桥梁,移动应用扮演着至关重要的角色。而在移动应用的生态中,Android 系统凭借其开放性和庞大的用户基础,占据了全球移动操作系统…...

新书推荐:《尊严的颓败》在废墟之上,寻找灵魂的微光
当世界沦为巨大的名利场,当人被简化为数据与欲望的载体,我们该如何定义“人”?又该如何安放那颗被称为“灵魂”的种子?洛本的《尊严的颓败》并非一本让人阅读时感到轻松愉悦的书,它更像是一把手术刀,精准地…...

百川2-13B-4bits量化实测:OpenClaw长文本处理会丢信息吗?
百川2-13B-4bits量化实测:OpenClaw长文本处理会丢信息吗? 1. 测试背景与动机 最近在尝试用OpenClaw搭建个人自动化工作流时,遇到一个实际问题:当处理长文档(比如几十页的PDF或网页文章)时,AI助…...