鹅厂面试官:Transformer 为何需要位置编码?
最近这一两周看到不少互联网公司都已经开始秋招发放Offer。
不同以往的是,当前职场环境已不再是那个双向奔赴时代了。求职者在变多,HC 在变少,岗位要求还更高了。
最近,我们又陆续整理了很多大厂的面试题,帮助一些球友解惑答疑,分享技术面试中的那些弯弯绕绕。
- 《大模型面试宝典》(2024版) 正式发布!
喜欢本文记得收藏、关注、点赞。更多实战和面试交流,文末加入我们
技术交流

本文基于 llama 模型的源码,学习相对位置编码的实现方法,本文不细究绝对位置编码和相对位置编码的数学原理。
大模型新人在学习中容易困惑的几个问题:
-
为什么一定要在 transformer 中使用位置编码?
-
相对位置编码在 llama 中是怎么实现的?
-
大模型的超长文本预测和位置编码有什么关系?
01 为什么需要位置编码
很多初学者都会读到这样一句话:transformer 使用位置编码的原因是它不具备位置信息。大家都只把这句话当作公理,却很少思考这句话到底是什么意思?
这句话的意思是,如果没有位置编码,那么 “床前明月”、“前床明月”、“前明床月” 这几个输入,会预测出完全一样的文本。
也就是说,不管你输入的 prompt 顺序是什么,只要 prompt 的文本是相同的,那么模型 decode 的文本就只取决于 prompt 的最后一个 token。
import torch
from torch import nn
import mathbatch = 1
dim = 10
num_head = 2
embedding = nn.Embedding(5, dim)
q_matrix = nn.Linear(dim, dim, bias=False)
k_matrix = nn.Linear(dim, dim, bias=False)
v_matrix = nn.Linear(dim, dim, bias=False)x = embedding(torch.tensor([1,2,3])).unsqueeze(0)
y = embedding(torch.tensor([2,1,3])).unsqueeze(0)def attention(input):q = q_matrix(input).view(batch, -1, num_head, dim // num_head).transpose(1, 2)k = k_matrix(input).view(batch, -1, num_head, dim // num_head).transpose(1, 2)v = v_matrix(input).view(batch, -1, num_head, dim // num_head).transpose(1, 2)attn_weights = torch.matmul(q, k.transpose(2, 3)) / math.sqrt(dim // num_head)attn_weights = nn.functional.softmax(attn_weights, dim=-1)outputs = torch.matmul(attn_weights, v).transpose(1, 2).reshape(1, len([1,2,3]), dim)print(outputs)attention(x)
attention(y)
执行上面的代码会发现,虽然 x 和 y 交换了第一个 token 和第二个 token 的输入顺序,但是第三个 token 的计算结果完全没有发生改变,那么模型预测第四个 token 时,便会得到相同的结果。
如果有读者对矩阵运算感到混淆的话,可以看看下面的简单推导:
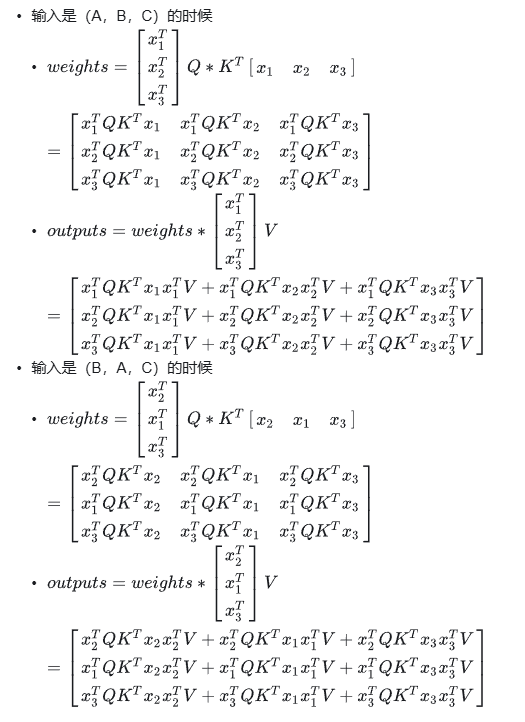
可以看出,当第一个 token 与第二个 token 交换顺序后,模型输出矩阵的第一维和第二维也交换了顺序,但输出的值完全没有变化。
第三个 token 的输出结果也是完全没有受到影响,这也就是前面说的:如果没有位置编码,模型 decode 的文本就只取决于 prompt 的最后一个 token。
不过需要注意的是,由于 attention_mask 的存在(前置位 token 看不到后置位 token),所以即使不加位置编码,transformer 的输出还是会受到 token 的位置影响。
02 相对位置编码的实现
我们以 modeling_llama.py 的源码为例,来学习相对位置编码的实现方法。
class LlamaRotaryEmbedding(torch.nn.Module):def __init__(self, dim, max_position_embeddings=2048, base=10000, device=None):super().__init__()inv_freq = 1.0 / (base ** (torch.arange(0, dim, 2).float().to(device) / dim))self.register_buffer("inv_freq", inv_freq)# Build here to make `torch.jit.trace` work.self.max_seq_len_cached = max_position_embeddingst = torch.arange(self.max_seq_len_cached, device=self.inv_freq.device, dtype=self.inv_freq.dtype)freqs = torch.einsum("i,j->ij", t, self.inv_freq)# Different from paper, but it uses a different permutation in order to obtain the same calculationemb = torch.cat((freqs, freqs), dim=-1)self.register_buffer("cos_cached", emb.cos()[None, None, :, :], persistent=False)self.register_buffer("sin_cached", emb.sin()[None, None, :, :], persistent=False)def forward(self, x, seq_len=None):# x: [bs, num_attention_heads, seq_len, head_size]# This `if` block is unlikely to be run after we build sin/cos in `__init__`. Keep the logic here just in case.if seq_len > self.max_seq_len_cached:self.max_seq_len_cached = seq_lent = torch.arange(self.max_seq_len_cached, device=x.device, dtype=self.inv_freq.dtype)freqs = torch.einsum("i,j->ij", t, self.inv_freq)# Different from paper, but it uses a different permutation in order to obtain the same calculationemb = torch.cat((freqs, freqs), dim=-1).to(x.device)self.register_buffer("cos_cached", emb.cos()[None, None, :, :], persistent=False)self.register_buffer("sin_cached", emb.sin()[None, None, :, :], persistent=False)return (self.cos_cached[:, :, :seq_len, ...].to(dtype=x.dtype),self.sin_cached[:, :, :seq_len, ...].to(dtype=x.dtype),)def rotate_half(x):"""Rotates half the hidden dims of the input."""x1 = x[..., : x.shape[-1] // 2]x2 = x[..., x.shape[-1] // 2 :]return torch.cat((-x2, x1), dim=-1)def apply_rotary_pos_emb(q, k, cos, sin, position_ids):# The first two dimensions of cos and sin are always 1, so we can `squeeze` them.cos = cos.squeeze(1).squeeze(0) # [seq_len, dim]sin = sin.squeeze(1).squeeze(0) # [seq_len, dim]cos = cos[position_ids].unsqueeze(1) # [bs, 1, seq_len, dim]sin = sin[position_ids].unsqueeze(1) # [bs, 1, seq_len, dim]q_embed = (q * cos) + (rotate_half(q) * sin)k_embed = (k * cos) + (rotate_half(k) * sin)return q_embed, k_embed
相对位置编码在 attention 中的应用方法如下:
self.rotary_emb = LlamaRotaryEmbedding(self.head_dim, max_position_embeddings=self.max_position_embeddings)
cos, sin = self.rotary_emb(value_states, seq_len=kv_seq_len)query_states, key_states = apply_rotary_pos_emb(query_states, key_states, cos, sin, position_ids)if past_key_value is not None:# reuse k, v, self_attentionkey_states = torch.cat([past_key_value[0], key_states], dim=1)value_states = torch.cat([past_key_value[1], value_states], dim=1)根据 value_states 矩阵的形状去调取 cos 和 sin 两个 tensor, cos 与 sin 的维度均是 batch_size * head_num * seq_len * head_dim;
利用 apply_rotary_pos_emb 去修改 query_states 和 key_states 两个 tensor,得到新的 q,k 矩阵
需要注意的是,在解码时,position_ids 的长度是和输入 token 的长度保持一致的,prompt 是 4 个 token 的话。
第一次解码时,position_ids: tensor([[0, 1, 2, 3]], device=‘cuda:0’),q 矩阵与 k 矩阵的相对位置编码信息通过 apply_rotary_pos_emb() 获得;
第二次解码时,position_ids: tensor([[4]], device=‘cuda:0’),当前 token 的相对位置编码信息通过 apply_rotary_pos_emb() 获得。
前 4 个 token 的相对位置编码信息则是通过 key_states = torch.cat([past_key_value[0], key_states], dim=1) 集成到 k 矩阵中;
……
……
以上代码的公式,均可以从苏神原文中找到。
这些代码可以从 llama 模型中剥离出来直接执行,如果感到困惑,可以像下面一样,将 apply_rotary_pos_emb() 的整个过程给 print 出来观察一下:
head_num, head_dim, kv_seq_len = 8, 20, 5
position_ids = torch.tensor([[0, 1, 2, 3, 4]])
query_states = torch.randn(1, head_dim, kv_seq_len, head_dim)
key_states = torch.randn(1, head_dim, kv_seq_len, head_dim)
value_states = torch.randn(1, head_dim, kv_seq_len, head_dim)
rotary_emb = LlamaRotaryEmbedding(head_dim)
cos, sin = rotary_emb(value_states, seq_len=kv_seq_len)
print(cos, sin)
query_states, key_states = apply_rotary_pos_emb(query_states, key_states, cos, sin, position_ids)
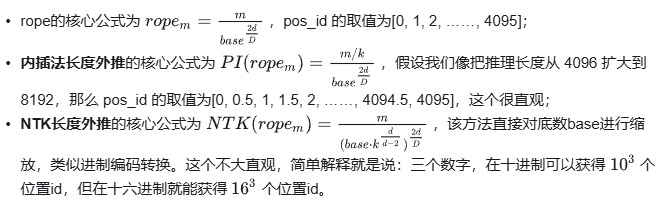
03 位置编码与长度外推
长度外推指的是,大模型在训练的只见过长度为 X 的文本,但在实际应用时却有如下情况:

我们假设 X 的取值为 4096,那么也就意味着,模型自始至终没有见到过 pos_id >= 4096 的位置编码,进而导致模型的预测结果完全不可控。
因此,解决长度外推问题的关键便是如何让模型见到比训练文本更长的位置编码。
以上关于文本外推的介绍均是比较大白话的理解,只是为了强调位置编码很重要这一观点。
相关文章:
鹅厂面试官:Transformer 为何需要位置编码?
最近这一两周看到不少互联网公司都已经开始秋招发放Offer。 不同以往的是,当前职场环境已不再是那个双向奔赴时代了。求职者在变多,HC 在变少,岗位要求还更高了。 最近,我们又陆续整理了很多大厂的面试题,帮助一些球…...

MySQL数据库学习指南
一、数据库的库操作 1、创建数据库 2、删除数据库 3、查看数据库 4、选择数据库 5、修改数据库 6、数据库备份与恢复 7、数据库的权限管理 二、数据库的表操作 1、创建表 2、删除表 3、修改表 4、查看表的结构 5、查看表的数据 6、创建索引 7、删除索引 8、约束…...

算法刷题-小猫爬山
本题来源165. 小猫爬山 - AcWing题库 翰翰和达达饲养了 NN 只小猫,这天,小猫们要去爬山。 经历了千辛万苦,小猫们终于爬上了山顶,但是疲倦的它们再也不想徒步走下山了(呜咕>_<)。 翰翰和达达只好花…...
Maven项目管理工具-初始+环境配置
1. Maven的概念 1.1. 什么是Maven Maven是跨平台的项目管理工具。主要服务于基于Java平台的项目构建,依赖管理和项目信息管理。 理想的项目构建:高度自动化,跨平台,可重用的组件,标准化的流程 maven能够自动下载依…...

【JavaEE初阶】网络编程TCP协议实现回显服务器以及如何处理多个客户端的响应
前言 🌟🌟本期讲解关于TCP/UDP协议的原理理解~~~ 🌈感兴趣的小伙伴看一看小编主页:GGBondlctrl-CSDN博客 🔥 你的点赞就是小编不断更新的最大动力 🎆那么废话不多说…...

Android 中的串口开发
一:背景 本文着重讲安卓下的串口。 由于开源的Android在各种智能设备上的使用越来越多,如车载系统等。在我们的认识中,Android OS的物理接口一般只有usb host接口和耳机接口,但其实安卓支持各种各样的工业接口,如HDM…...

TensorRt OP
在TensorRT中,OP(Operations,操作)是指网络中的基本计算单元,类似于数学中的运算符。每个OP执行一个特定的计算任务,例如卷积、矩阵乘法、激活函数等。TensorRT通过识别和优化这些OP来提高深度学习模型的推…...

构建负责任的人工智能:数据伦理与隐私保护
构建负责任的人工智能:数据伦理与隐私保护 目录 🌟 数据伦理的重要性📊 公平性评估:实现无偏差的模型🔒 数据去标识化:保护用户隐私的必要手段🔍 透明性与问责:建立可信的数据处理…...

微信小程序live-pusher和video同时使用,video播放声音时时大时小
一、遇到的问题 微信小程序live-pusher和video同时使用,video播放声音时有时无时大时小 二、排查流程 业务是模拟面试,每道题一个推流live-pusher和一个面试题video,一次面试有多道面试题,页面就一个live-pusher和一个video,切换面试题时给live-pusher和video重新赋值u…...

MySQL 分库分表实战
在当今互联网时代,数据量的增长呈爆炸式趋势,传统的单库单表架构已经难以满足大规模数据存储和高并发访问的需求。MySQL 分库分表技术应运而生,它可以有效地提高数据库的性能、扩展性和可用性。本文将详细介绍 MySQL 分库分表的实战经验。 一…...

MySQL—CRUD—进阶—(二) (ಥ_ಥ)
文本目录: ❄️一、新增: ❄️二、查询: 1、聚合查询: 1)、聚合函数: 2)、GROUP BY子句: 3)、HAVING 子句: 2、联合查询: 1)、内连接…...

时序分解 | TTNRBO-VMD改进牛顿-拉夫逊算法优化变分模态分解
时序分解 | TTNRBO-VMD改进牛顿-拉夫逊算法优化变分模态分解 目录 时序分解 | TTNRBO-VMD改进牛顿-拉夫逊算法优化变分模态分解效果一览基本介绍程序设计参考资料 效果一览 基本介绍 (创新独家)TTNRBO-VMD改进牛顿-拉夫逊优化算优化变分模态分解TTNRBO–VMD 优化VMD分解层数K和…...

2024“源鲁杯“高校网络安全技能大赛-Misc-WP
Round 1 hide_png 题目给了一张图片,flag就在图片上,不过不太明显,写个python脚本处理一下 from PIL import Image # 打开图像并转换为RGB模式 img Image.open("./attachments.png").convert("RGB") # 获取图像…...

CSS行块标签的显示方式
块级元素 标签:h1-h6,p,div,ul,ol,li,dd,dt 特点: (1)如果块级元素不设置默认宽度,那么该元素的宽度等于其父元素的宽度。 (2)所有的块级元素独占一行显示. (3ÿ…...

Go 语言中的 for range 循环教程
在 Go 语言中,for range 循环是一个方便的语法结构,用于遍历数组、切片、映射和字符串。本教程将通过示例代码来帮助理解如何在 Go 中使用 for range 循环。 package mainimport "fmt"func main() {// 遍历切片并计算和nums : []int{2, 3, 4}…...

青训营 X 豆包MarsCode 技术训练营--小M的比赛胜场计算
问题描述 小M参加了一场n个人的比赛,比赛规则是所有选手两两对决。每个人有一个能力值,对应着他们的序号。参赛者同时被分为黄色或蓝色两种颜色。比赛胜负的规则如下: 当比赛双方颜色不同时,能力值大的选手获胜; 当比…...

海王3纯源码
海王3是一款热门的捕鱼类游戏,其纯源码为开发者提供了一个完整的游戏开发基础。该源码包括客户端和服务端的完整架构,支持多人在线竞技模式和丰富的游戏玩法。服务端采用C语言编写,并使用MySQL数据库来存储玩家数据,确保数据处理的…...

【ShuQiHere】Linux 系统中的硬盘管理详解:命令与技巧
【ShuQiHere】 💽 在 Linux 系统中,硬盘管理不仅仅是存储数据的操作,更涉及系统性能、数据安全和稳定性的优化。无论你是系统管理员、开发者还是 Linux 爱好者,掌握硬盘管理的基础操作都非常有用。本文将从硬盘健康检查、分区管理…...

数据结构之堆和二叉树的简介
1.树 1.1 树的概念与结构 如图所示,树是⼀种非线性的数据结构,它是由 n (n>0) 个有限结点组成⼀个具有层次关系的集合。把它叫做树是因为它看起来像一棵倒挂的树,也就是说它是根朝上,而叶朝下的。 …...

微信小程序上传图片添加水印
微信小程序使用wx.chooseMedia拍摄或从手机相册中选择图片并添加水印, 代码如下: // WXML代码:<canvas canvas-id"watermarkCanvas" style"width: {{canvasWidth}}px; height: {{canvasHeight}}px;"></canvas&…...

揭秘AI_NovelGenerator:重构长篇小说创作的智能架构
揭秘AI_NovelGenerator:重构长篇小说创作的智能架构 【免费下载链接】AI_NovelGenerator 使用ai生成多章节的长篇小说,自动衔接上下文、伏笔 项目地址: https://gitcode.com/GitHub_Trending/ai/AI_NovelGenerator 传统长篇小说创作面临三大核心痛…...

弹性伸缩与高可用:重力科技智能投放平台的云原生架构实践
一、 出海营销平台:流量洪峰与全球化部署的挑战 重力科技的AI智能投放平台,作为全球出海品牌的营销利器,面临着严峻的架构挑战: 流量洪峰: 面对全球不同时区的营销活动、节假日促销、突发热点等,请求量可能…...

PX4无人机仿真入门:XTDrone平台从安装到自定义机型的完整指南
PX4无人机仿真入门:XTDrone平台从安装到自定义机型的完整指南 无人机仿真技术已成为现代航空研发的重要工具,而PX4作为开源飞控系统的代表,配合XTDrone仿真平台,为开发者提供了高效、安全的测试环境。本文将带您从零开始ÿ…...
)
告别.crx文件!手把手教你用crx2rnx工具搞定GNSS数据转换(附FileZilla下载技巧)
从CRX到RINEX:GNSS数据处理新手指南 第一次接触GNSS数据处理时,面对各种陌生的文件格式和命令行工具,很多新手都会感到手足无措。特别是从武汉大学IGS数据中心下载的.crx.gz压缩包,需要经过解压和格式转换才能得到可用的观测数据。…...

嵌入式老司机教你玩转Hi3520DV400:NOR/NAND双启动配置与TFTP极速烧写技巧
Hi3520DV400深度开发实战:双启动架构设计与工业级烧录优化 在嵌入式系统开发中,启动介质的选择和镜像烧录效率直接影响产品开发周期和生产部署效率。海思Hi3520DV400作为一款广泛应用于视频处理领域的芯片,其灵活的启动配置和高效的烧录方法值…...

基于RBF神经网络的机械臂轨迹跟踪控制优化及其Matlab仿真实现
基于RBF神经网络的机械臂轨迹跟踪控制matlab仿真机械臂轨迹跟踪控制这事挺有意思的,特别是加上RBF神经网络之后。咱们先拿二自由度机械臂开刀,看看怎么在MATLAB里折腾这个仿真。先说个真实场景——当机械臂抓取物体时,关节摩擦力、负载变化这…...

阿里Qwen3-4B-Instruct-2507新手部署指南:从镜像到网页推理全流程
阿里Qwen3-4B-Instruct-2507新手部署指南:从镜像到网页推理全流程 1. 模型简介与核心能力 1.1 模型概述 Qwen3-4B-Instruct-2507是阿里巴巴通义实验室最新推出的轻量级文本生成大模型,属于Qwen3系列中的指令微调版本。这个40亿参数的模型在保持较低硬…...

后端开发Java和大模型应用开发怎么选?
一、Java 后端开发:老骥伏枥,卷得头皮发麻Java 后端这玩意儿,说白了就是工业级老油条的战场,技术成熟,生态庞大,一言不合就是 Spring 全家桶,Redis、MySQL、消息队列、分布式、中间件、容器化、…...

工作流管理平台搭建指南:使用n8n-mcp-server构建企业级自动化流程
工作流管理平台搭建指南:使用n8n-mcp-server构建企业级自动化流程 【免费下载链接】n8n-mcp-server MCP server that provides tools and resources for interacting with n8n API 项目地址: https://gitcode.com/gh_mirrors/n8/n8n-mcp-server n8n-mcp-serv…...

RK3588 Ubuntu 20.04 编译 eglinfo 踩坑实录:从 Python 环境配置到 Mali 驱动调试
RK3588 Ubuntu 20.04 编译 eglinfo 全流程解析与深度排错指南 在嵌入式图形开发领域,RK3588作为Rockchip旗舰级SoC,其Mali-G610 GPU的OpenGL ES支持能力直接影响工业HMI、车载中控等无头设备的图形表现。本文将系统性地剖析从Python环境修复到Mali驱动验…...