GR-ConvNet代码详解
GR-ConvNet代码详解
文章目录
- GR-ConvNet代码详解
- 前言
- 一、utils
- 1.dataset_processing
- 1.image.py
- 1.Iamge类
- 2.DepthImage类
- 3.WidthImage类
- 2.grasp.py
- 1. _gr_text_to_no()方法
- 2.GraspRectangles类
- 3.GraspRectangle类
- 3.Grasp类
- 4.detect_grasps方法
- 3.generate_cornell_depth.py
- 4.evaluation.py
- 2.data
- 1.camera_data.py
- 2.grasp_data.py
- 3.cornell_data.py
- 4.jacquard_data
- 3.visualisation
- 二、trained-models
- 三、inference
- 1.grasp_generator.py
- 2.post_process.py
- 3.models
- grasp_model.py
- 四、hardware
- 1.calibrate_camera.py
- 2.camera.py
- 3.device.py
- 五、train_network.py
- 六、
前言
随着之前看完了GR-ConvNet网络的论文,接下来就开始学习其代码。
首先,其代码分为五个模块hardware,inference,trained-models,utils和训练模型。

一、utils
这个文件夹下都是比较常用的类和方法。

1.dataset_processing

1.image.py
在image文件下主要分为了三个类
1.Iamge类
在这个类中主要定义了一些便于图像操作的一些方法。
getattr方法:当访问Image类中不存在的属性时,它就会转化成访问image对象对应矩阵中的属性。例如当访问image.size时。
def __getattr__(self, attr):# 当访问self本身不具有的属性时,就会转化成arr去访问这个属性return getattr(self.img, attr)from_file方法:通过文件的路径去创建一个Image对象
def from_file(cls, fname):return cls(imread(fname))
其他还定义了一些旋转,裁剪,放缩等方法,注意+d的表示是在该图片的复制图片上进行操作。
2.DepthImage类
首先,该类继承了Image类,所以它可以调用父类的任何方法。
from_pcd:这个方法主要是使用cornell数据集中的点云数据生成对应的深度图像。点云数据具体格式可参照cornell数据集介绍。
def from_pcd(cls, pcd_filename, shape, default_filler=0, index=None):img = np.zeros(shape)if default_filler != 0:img += default_fillerwith open(pcd_filename) as f:for l in f.readlines():ls = l.split()if len(ls) != 5:# Not a point line in the file.continuetry:# Not a number, carry on.float(ls[0])except ValueError:continuei = int(ls[4]) # 求解当前点对应图像的x,y坐标r = i // shape[1]c = i % shape[1]if index is None:x = float(ls[0])y = float(ls[1])z = float(ls[2])img[r, c] = np.sqrt(x ** 2 + y ** 2 + z ** 2)else:img[r, c] = float(ls[index])return cls(img / 1000.0)
from_tiff方法:从tiff文件直接生成深度图像对象。
inpaint方法:对应论文中,
我猜测可能由于点云数据中的点不够填充数据集的大小,所以使用这个方法将缺失的那些点置为0。
gradients方法:使用Sobel方法计算深度图像中的梯度,方便检测那些边缘值。
normalise方法:对图像标准化。
3.WidthImage类
对宽度图像裁剪和标准化。宽度图像描述了对应的每个像素所需夹臂宽度。
2.grasp.py
在这个文件下主要定义了三个类和两个方法。
1. _gr_text_to_no()方法
将从文件中读入了x,y。x,y表示抓取框四个点中的一个点。
这个方法将点的类型转化为int并且将去偏移量,以(y,x)的形式返回。
2.GraspRectangles类
这个类主要定义了一些对抓取矩形框进行操作的方法,用来表示多个抓取框。
iter方法,使得类对象可以用for循环来遍历。
getattr方法,如果在当前类找不到需要调用的方法,则转去GraspRectangle类中寻找对应的方法。
load_from_array方法,读入一个n*4*2的数组,表示当前有n个抓取框,依次将其装填进grs列表中。
def load_from_array(cls, arr):"""Load grasp rectangles from numpy array.:param arr: Nx4x2 array, where each 4x2 array is the 4 corner pixels of a grasp rectangle.:return: GraspRectangles()"""grs = []for i in range(arr.shape[0]):grp = arr[i, :, :].squeeze() # 将第0维去掉if grp.max() == 0:breakelse:grs.append(GraspRectangle(grp))return cls(grs)
load_from_cornell_file方法,从cornell数据集中读取文件。
cornell数据集中每一行代表抓取框的一个点,所以依次读入即可。最后通过GraspRectangel类初始化对应的抓取框,并将其装填进grs列表中。
def load_from_cornell_file(cls, fname):"""Load grasp rectangles from a Cornell dataset grasp file.:param fname: Path to text file.:return: GraspRectangles()"""grs = []with open(fname) as f:while True:# Load 4 lines at a time, corners of bounding box.p0 = f.readline()if not p0:break # EOFp1, p2, p3 = f.readline(), f.readline(), f.readline()try:gr = np.array([_gr_text_to_no(p0),_gr_text_to_no(p1),_gr_text_to_no(p2),_gr_text_to_no(p3)])grs.append(GraspRectangle(gr))except ValueError:# Some files contain weird values.continuereturn cls(grs)
load_from_jacquard_file方法,从Jacquard数据集中读入抓取框。
注意Jacquard数据集和cornell数据集的格式不同,其每一行代表对应抓取框的中心x,y,对应水平轴的偏移量θ,对应夹具的宽度w,h是什么我目前也未搞懂,猜测应该是对应抓取狂的高度。
依次遍历即可,注意他是通过Grasp类来初始化当前抓取框的,最终填充到列表grs中。
def load_from_jacquard_file(cls, fname, scale=1.0):"""Load grasp rectangles from a Jacquard dataset file.:param fname: Path to file.:param scale: Scale to apply (e.g. if resizing images):return: GraspRectangles()"""grs = []with open(fname) as f:for l in f:x, y, theta, w, h = [float(v) for v in l[:-1].split(';')]# index based on row, column (y,x), and the Jacquard dataset's angles are flipped around an axis.grs.append(Grasp(np.array([y, x]), -theta / 180.0 * np.pi, w, h).as_gr)grs = cls(grs)grs.scale(scale)return grs
draw方法,这个方法是通过得到的抓取框生成对应抓取质量,抓取角度,抓取宽度的真实值。
比如shape=224*224,首先初始化了三张图片,也就是三个矩阵。并且使其全部置为0。
然后通过compact_polygon_coords获取对应抓取矩形框的索引。
然后将三张图片包含在抓取框内的进行初始化。最终通过网络训练就可以得到和真实值类似的三张图片的输出。
def draw(self, shape, position=True, angle=True, width=True):"""Plot all GraspRectangles as solid rectangles in a numpy array, e.g. as network training data.:param shape: output shape:param position: If True, Q output will be produced:param angle: If True, Angle output will be produced:param width: If True, Width output will be produced:return: Q, Angle, Width outputs (or None)"""if position:pos_out = np.zeros(shape)else:pos_out = Noneif angle:ang_out = np.zeros(shape)else:ang_out = Noneif width:width_out = np.zeros(shape)else:width_out = Nonefor gr in self.grs:rr, cc = gr.compact_polygon_coords(shape) # 计算当前图像中抓取框的索引if position:pos_out[rr, cc] = 1.0if angle:ang_out[rr, cc] = gr.angle if width:width_out[rr, cc] = gr.length # 这里的length代表对应夹具的宽度return pos_out, ang_out, width_out
剩余就是一些比较简单的复制,计算中心等方法。在此不过多赘述。
3.GraspRectangle类
这个类主要用于生成一个抓取框对象。
_init_方法,注意这里的points表示一个四行两列的矩阵,代表一个抓取框。
def __init__(self, points):self.points = points
angel方法,计算当前抓取框对应水平线的旋转值。
这里的角度为正值 表示图像由水平方向逆时针旋转多少度。
def angle(self):""":return: Angle of the grasp to the horizontal."""dx = self.points[1, 1] - self.points[0, 1]dy = self.points[1, 0] - self.points[0, 0]return (np.arctan2(-dy, dx) + np.pi / 2) % np.pi - np.pi / 2
as_grasp方法,由抓取框表示转化为x,y角度表示。Grasp()
polygon_coords方法,计算对应抓取框对应形状下像素的索引。
def polygon_coords(self, shape=None):""":param shape: Output Shape:return: Indices of pixels within the grasp rectangle polygon."""return polygon(self.points[:, 0], self.points[:, 1], shape)
compact_polygon_coords方法,计算其在夹具宽度/3条件下矩形框的对应像素的索引值。
def compact_polygon_coords(self, shape=None):""":param shape: Output shape:return: Indices of pixels within the centre thrid of the grasp rectangle."""return Grasp(self.center, self.angle, self.length / 3, self.width).as_gr.polygon_coords(shape)
通过这两个方法取得对应的索引,就可以计算iou值。
iou方法:计算iou值,注意只在角度偏移小于30°时计算。
def iou(self, gr, angle_threshold=np.pi / 6):# 对应论文中的评判标准2,如果角度偏移大于30°,则认为是抓取失败。if abs((self.angle - gr.angle + np.pi / 2) % np.pi - np.pi / 2) > angle_threshold:return 0rr1, cc1 = self.polygon_coords()rr2, cc2 = polygon(gr.points[:, 0], gr.points[:, 1])try:r_max = max(rr1.max(), rr2.max()) + 1c_max = max(cc1.max(), cc2.max()) + 1except:return 0canvas = np.zeros((r_max, c_max))canvas[rr1, cc1] += 1canvas[rr2, cc2] += 1union = np.sum(canvas > 0)if union == 0:return 0intersection = np.sum(canvas == 2)return intersection / union
接下来就是一些简单的裁剪方法,不过多赘述。
3.Grasp类
这个类主要将抓取框表示成了抓取中心,抓取角度,抓取得分。
通过Grasp类和GraspRectangle类的互相转化,即可实现论文中提到的将网络对应于图像的输出值映射成为其对应的抓取框表示。
as_gr方法:将网络输出的三个值映射成为其对应的抓取框表示。
max_iou方法,计算预测出矩形框的最大iou值。
4.detect_grasps方法
该方法通过网络输出的q,ang,width图像来创建对应的Grasp对象,方便后续的操作。
并且使用peak_local_max方法来搜索q图像中局部最大值。因为找到的局部最大值可能就是对应的抓取框的中心位置。
def detect_grasps(q_img, ang_img, width_img=None, no_grasps=1):"""Detect grasps in a network output.:param q_img: Q image network output:param ang_img: Angle image network output:param width_img: (optional) Width image network output:param no_grasps: Max number of grasps to return:return: list of Grasps"""local_max = peak_local_max(q_img, min_distance=20, threshold_abs=0.2, num_peaks=no_grasps)grasps = []for grasp_point_array in local_max:grasp_point = tuple(grasp_point_array)grasp_angle = ang_img[grasp_point]g = Grasp(grasp_point, grasp_angle)if width_img is not None:g.length = width_img[grasp_point]g.width = g.length / 2grasps.append(g)return grasps
3.generate_cornell_depth.py
用来调用之前DepthIamge类中的from_pcd方法来生成Cornell数据集的深度图像。
if __name__ == '__main__':parser = argparse.ArgumentParser(description='Generate depth images from Cornell PCD files.')parser.add_argument('path', type=str, help='Path to Cornell Grasping Dataset')args = parser.parse_args()pcds = glob.glob(os.path.join(args.path, '*', 'pcd*[0-9].txt'))pcds.sort()for pcd in pcds:di = DepthImage.from_pcd(pcd, (480, 640))di.inpaint()of_name = pcd.replace('.txt', 'd.tiff')print(of_name)imsave(of_name, di.img.astype(np.float32))
4.evaluation.py
plot_output方法:画出网络输出的质量,角度,宽度图像。
calculate_iou_match方法:计算iou是否超过25%。
细节:对于一个预测值,它的真实值可能有多种情况(比如对于一个物体有多个抓取)
只要最大的那个iou超过阈值,则说明抓取成功。
2.data

1.camera_data.py
这个文件主要定义了一个CameraData类。
这个类主要完成对相机数据的读取。
首先将数据读进来,默认输入图像尺寸(640480),最终输出图像尺寸224224(预处理匹配网络输入图像尺寸)。计算出其对应的左上,右下坐标。
然后依次获取其深度图像和RGB图像,再经由通道维将二者联合。
2.grasp_data.py
GraspDatasetBase类,用来加载数据集。
首先它继承了torch.utils.data.Dataset类,必须重写getitem和len方法。
class GraspDatasetBase(torch.utils.data.Dataset):"""An abstract dataset for training networks in a common format."""def __init__(self, output_size=224, include_depth=True, include_rgb=False, random_rotate=False,random_zoom=False, input_only=False):""":param output_size: Image output size in pixels (square):param include_depth: Whether depth image is included:param include_rgb: Whether RGB image is included:param random_rotate: Whether random rotations are applied:param random_zoom: Whether random zooms are applied:param input_only: Whether to return only the network input (no labels)"""self.output_size = output_sizeself.random_rotate = random_rotateself.random_zoom = random_zoomself.input_only = input_onlyself.include_depth = include_depthself.include_rgb = include_rgbself.grasp_files = []if include_depth is False and include_rgb is False:raise ValueError('At least one of Depth or RGB must be specified.')@staticmethoddef numpy_to_torch(s):if len(s.shape) == 2:return torch.from_numpy(np.expand_dims(s, 0).astype(np.float32))else:return torch.from_numpy(s.astype(np.float32))# 抽象方法,必须在子类中重写。# get_gtbb是对矩形框进行旋转和放缩操作def get_gtbb(self, idx, rot=0, zoom=1.0):raise NotImplementedError()def get_depth(self, idx, rot=0, zoom=1.0):raise NotImplementedError()def get_rgb(self, idx, rot=0, zoom=1.0):raise NotImplementedError()def __getitem__(self, idx):if self.random_rotate:rotations = [0, np.pi / 2, 2 * np.pi / 2, 3 * np.pi / 2]rot = random.choice(rotations) # 随机选取一个旋转值else:rot = 0.0if self.random_zoom:zoom_factor = np.random.uniform(0.5, 1.0)else:zoom_factor = 1.0# Load the depth imageif self.include_depth:depth_img = self.get_depth(idx, rot, zoom_factor)# Load the RGB imageif self.include_rgb:rgb_img = self.get_rgb(idx, rot, zoom_factor)# Load the grasps# 读取抓取矩形框,并对其进行旋转放缩操作bbs = self.get_gtbb(idx, rot, zoom_factor)# 通过抓取框进行初始化真实值的质量,角度,宽度图像。pos_img, ang_img, width_img = bbs.draw((self.output_size, self.output_size))width_img = np.clip(width_img, 0.0, self.output_size / 2) / (self.output_size / 2)if self.include_depth and self.include_rgb:x = self.numpy_to_torch(np.concatenate((np.expand_dims(depth_img, 0),rgb_img),0))elif self.include_depth:x = self.numpy_to_torch(depth_img)elif self.include_rgb:x = self.numpy_to_torch(rgb_img)pos = self.numpy_to_torch(pos_img)cos = self.numpy_to_torch(np.cos(2 * ang_img))sin = self.numpy_to_torch(np.sin(2 * ang_img))width = self.numpy_to_torch(width_img)# 返回了这些值,在训练时可与神经网络的输出值对应,来计算损失return x, (pos, cos, sin, width), idx, rot, zoom_factordef __len__(self):return len(self.grasp_files)
3.cornell_data.py
从康奈尔数据集中读取数据。
4.jacquard_data
从jacquard数据集中读取数据。
3.visualisation
对输入图像,网络输出图像的可视化。
二、trained-models
保存了之前训练好的网络模型
三、inference
主要包含了两个文件和models文件夹

1.grasp_generator.py
对应于论文中的转换。
# Convert camera to robot coordinates
camera2robot = self.cam_pose
target_position = np.dot(camera2robot[0:3, 0:3], target) + camera2robot[0:3, 3:]
target_position = target_position[0:3, 0]# Convert camera to robot angle
angle = np.asarray([0, 0, grasps[0].angle])
angle.shape = (3, 1)
target_angle = np.dot(camera2robot[0:3, 0:3], angle)
这个文件实现了一个抓取生成器(GraspGenerator)类,用于从深度相机获取图像数据,利用预先训练好的深度学习模型预测抓取姿态,并将抓取姿态从相机坐标系转换到机器人坐标系,最后保存抓取姿态数据并在可视化模式下绘制抓取姿态。
2.post_process.py
post_process_output方法:该函数用于对网络的原始输出进行后处理,包括将输出从 PyTorch 张量转换为 NumPy 数组、计算角度、进行高斯滤波处理。其目的是对网络输出进行优化和调整,以获得更准确和可用的结果,主要用于抓取姿态预测的后处理阶段。
3.models

models文件夹下主要包括了grasp_model文件和GRConvNet网络模块的模型架构。
grasp_model.py
主要叙述了计算损失的过程,采用L1损失函数,最终函数的返回格式需要注意一下。

四、hardware
在其中分别又分为了三个模块。

1.calibrate_camera.py
这段代码实现了一个使用 Intel RealSense 相机获取彩色图像和深度图像,并进行可视化显示的程序。它通过RealSenseCamera类封装了与相机连接、图像获取和可视化的功能。
2.camera.py
这段代码实现了一个使用 Intel RealSense 相机获取彩色图像和深度图像,并进行可视化显示的程序。它通过RealSenseCamera类封装了与相机连接、图像获取和可视化的功能。
3.device.py
获取对应gpu,cpu
五、train_network.py
该文件主要是模型在两个标准数据集上的训练和验证。
分为validate方法,train方法,run方法。
注意trian和validate返回值是这样的一个数据。
六、
以上就是对GRConv-Net论文的代码详解。
通过读取代码,明白了论文中的一些细致的处理,对论文有了更深的理解。
接下来要准备跑一跑代码!
相关文章:
GR-ConvNet代码详解
GR-ConvNet代码详解 文章目录 GR-ConvNet代码详解前言一、utils1.dataset_processing1.image.py1.Iamge类2.DepthImage类3.WidthImage类 2.grasp.py1. _gr_text_to_no()方法2.GraspRectangles类3.GraspRectangle类3.Grasp类4.detect_grasps方法 3.generate_cornell_depth.py4.e…...
Excel自带傅里叶分析数据处理——归一化处理
在Excel工具中,默认情况下数据处理---傅里叶分析通常不进行归一化处理,需要用户手动进行归一化处理。 (1)傅里叶变换的原理 傅里叶变换将时域信号转换为频域信号,输出的是复数形式的频率分量,包含了幅值和…...

Centos7.6版本安装mysql详细步骤
操作步骤: 1.下载Linux版本Mysql并上传至linux系统中 2.解压mysql并查询系统中是否有相关软件存在以及配置mysql,启动mysql tar -zxvf mysql-5.7.35-linux-glibc2.12-x86_64.tar.gz tar -zxvf mysql-5.7.35-linux-glibc2.12-x86_64.tar.gz rpm -qa|grep mysql ##查…...

寄宿学校:为自闭症儿童提供全面的教育和关爱
在这个多彩的世界里,每一个生命都值得被温柔以待,每一颗心灵都值得被悉心呵护。然而,自闭症儿童这一特殊群体,他们的世界却常常被误解和忽视。幸运的是,有一种教育模式——寄宿学校,正为这些孩子打开了一扇…...

LLaMA Factory环境配置
LLaMA-Factory官方文档 安装正确的torch和cuda版本 参考: PyTorch 报错解决 1.ImportError: /usr/lib/x86_64-linux-gnu/libstdc.so.6: version GLIBCXX_3.4.29 not found 参考这个解决:丝滑解决ImportError: /usr/lib/x86_64-linux-gnu/libstdc.s…...

STM32实现毫秒级时间同步
提起“时间同步”这个概念,大家可能很陌生。一时间搞不清楚是什么意思。 我理解“时间同步”可以解决多个传感器采集数据不同时的问题,让多个传感器同时采集数据。 打个比方。两个人走路,都是100毫秒走一步(频率相同是前提&…...

瑞吉外卖之com.fasterxml.jackson.dataformat.cbor.CBORFactor相关报错
1.报错:Error creating bean with name routerFunctionMapping defined in class path resource [com/itheima/reggie/config/WebMvcConfig.class]: Failed to instantiate [org.springframework.web.servlet.function.support.RouterFunctionMapping]: Factory met…...

CSS - grid制作表格
1. grid-template-columns:网格布局中的列的数量,也可以设置列的宽度 .grid-container {display: grid;grid-template-columns: 80px 200px auto 40px; }.grid-container {display: grid;grid-template-columns: auto auto auto auto;//表示所有列的宽度…...
)
【pip】 的换源(临时换源和永久换源)
【pip】 的换源(临时换源和永久换源) 一、临时换源二、永久换源三、Linux换源四、Windows换源 一、临时换源 临时换源只需要在pip安装包时,加上一个-i参数后接源的url即可: 临时换源: 清华源 pip3 install markdown…...

Kaggle 数据集dogs-vs-cats的错误
如果你想用kaggle数据集dogs-vs-cats做深度学习数据,可能会遇到数据bug,大概类似于下面的错误: UnidentifiedImageError: cannot identify image file 其原因不是你的程序有问题,而是数据集本身还有bug: cats/666.jpgdogs/11702.jpg 预览一下…...

【网络原理】网络地址转换----NAT技术详解
💐个人主页:初晴~ 📚相关专栏:计算机网络那些事 我们在 IP协议 一文中介绍过,由于IPv4协议中 IP地址只有32位,导致最多只能表示 42亿9千万个IP地址。但我们需要通过IP地址来标识网络上的每一个设备&#x…...

React怎么创建虚拟dom和挂载到页面
1、🍟你可以直接下载本节配套的资源代码,然后导入vscode看效果,也可以跟着教程一点一点敲,都是没问题的。 2、🤔怎么运行本节代码? 很简单,随便找个浏览器打开index.html即可。💕 代…...

kafka-console-ui的简介及安装使用
kafka-console-ui的简介及安装使用 一、kafka-console-ui的简介二、安装kafka-console-ui2.1 源码安装2.2 docker安装 三、kafka-console-ui功能使用3.1、功能特性3.2、 功能介绍3.2.1 集群3.2.2 topic3.2.3 消费组3.2.4 Acl3.2.5 运维 一、kafka-console-ui的简介 kafka-cons…...

git 的分支管理详解
Git 的分支管理是其强大功能之一,允许开发者在同一代码库中并行开发多个特性或修复 bug,而不干扰主分支的代码。下面是对 Git 分支管理的详解: 1. 查看分支 查看所有分支 git branch # 查看本地分支 git branch -r # 查看远程分支 git br…...

w003基于Springboot的图书个性化推荐系统的设计与实现
🙊作者简介:多年一线开发工作经验,原创团队,分享技术代码帮助学生学习,独立完成自己的网站项目。 代码可以查看文章末尾⬇️联系方式获取,记得注明来意哦~🌹赠送计算机毕业设计600个选题excel文…...

医院信息化与智能化系统(6)
医院信息化与智能化系统(6) 这里只描述对应过程,和可能遇到的问题及解决办法以及对应的参考链接,并不会直接每一步详细配置 如果你想通过文字描述或代码画流程图,可以试试PlantUML,告诉GPT你的文件结构,让他给你对应的…...
js基础--4)
前端学习---(6)js基础--4
Promise Promise 是异步编程的一种新的解决方案和规范。 Promise优点: 1、可以很好地解决ES5中的回调地狱的问题(避免了层层嵌套的回调函数)。 2、统一规范、语法简洁、可读性和和可维护性强。 3、Promise 对象提供了简洁的 API,使得管理异步…...

241026-RHEL如何以root身份卸载Docker
在 RHEL 8.8 中,以 root 身份卸载 Docker 可以通过以下步骤完成: 停止 Docker 服务(如果已启动): sudo systemctl stop docker删除 Docker 包: 运行以下命令卸载 Docker 引擎及其依赖包(docker-…...

iPhone当U盘使用的方法 - iTunes共享文件夹无法复制到电脑怎么办 - 如何100%写入读出
效果图 从iPhone复制文件夹到windows电脑 步骤windows 打开iTunes通过USB连接iPhone和电脑手机允许授权iTunes中点击手机图标,进入到点击左边“文件共享”,在右边随便选择一个App(随意...)写入U盘:拖动电脑的文件&am…...

jenkins ssh 免密报错Host key verification failed.
jenkins 发布项目,ssh连接远程服务器时报错:Host key verification failed. 解决: 原因是生成的sshkey不是用的jenkins用户,所以切换用户到:jenkins重新生成sshkey su jenkins ssh-keygen -t rsa ssh-copy-id -i ~/…...

Python爬虫实战:研究MechanicalSoup库相关技术
一、MechanicalSoup 库概述 1.1 库简介 MechanicalSoup 是一个 Python 库,专为自动化交互网站而设计。它结合了 requests 的 HTTP 请求能力和 BeautifulSoup 的 HTML 解析能力,提供了直观的 API,让我们可以像人类用户一样浏览网页、填写表单和提交请求。 1.2 主要功能特点…...

Docker 离线安装指南
参考文章 1、确认操作系统类型及内核版本 Docker依赖于Linux内核的一些特性,不同版本的Docker对内核版本有不同要求。例如,Docker 17.06及之后的版本通常需要Linux内核3.10及以上版本,Docker17.09及更高版本对应Linux内核4.9.x及更高版本。…...

Ubuntu系统下交叉编译openssl
一、参考资料 OpenSSL&&libcurl库的交叉编译 - hesetone - 博客园 二、准备工作 1. 编译环境 宿主机:Ubuntu 20.04.6 LTSHost:ARM32位交叉编译器:arm-linux-gnueabihf-gcc-11.1.0 2. 设置交叉编译工具链 在交叉编译之前&#x…...
高频面试之3Zookeeper
高频面试之3Zookeeper 文章目录 高频面试之3Zookeeper3.1 常用命令3.2 选举机制3.3 Zookeeper符合法则中哪两个?3.4 Zookeeper脑裂3.5 Zookeeper用来干嘛了 3.1 常用命令 ls、get、create、delete、deleteall3.2 选举机制 半数机制(过半机制࿰…...
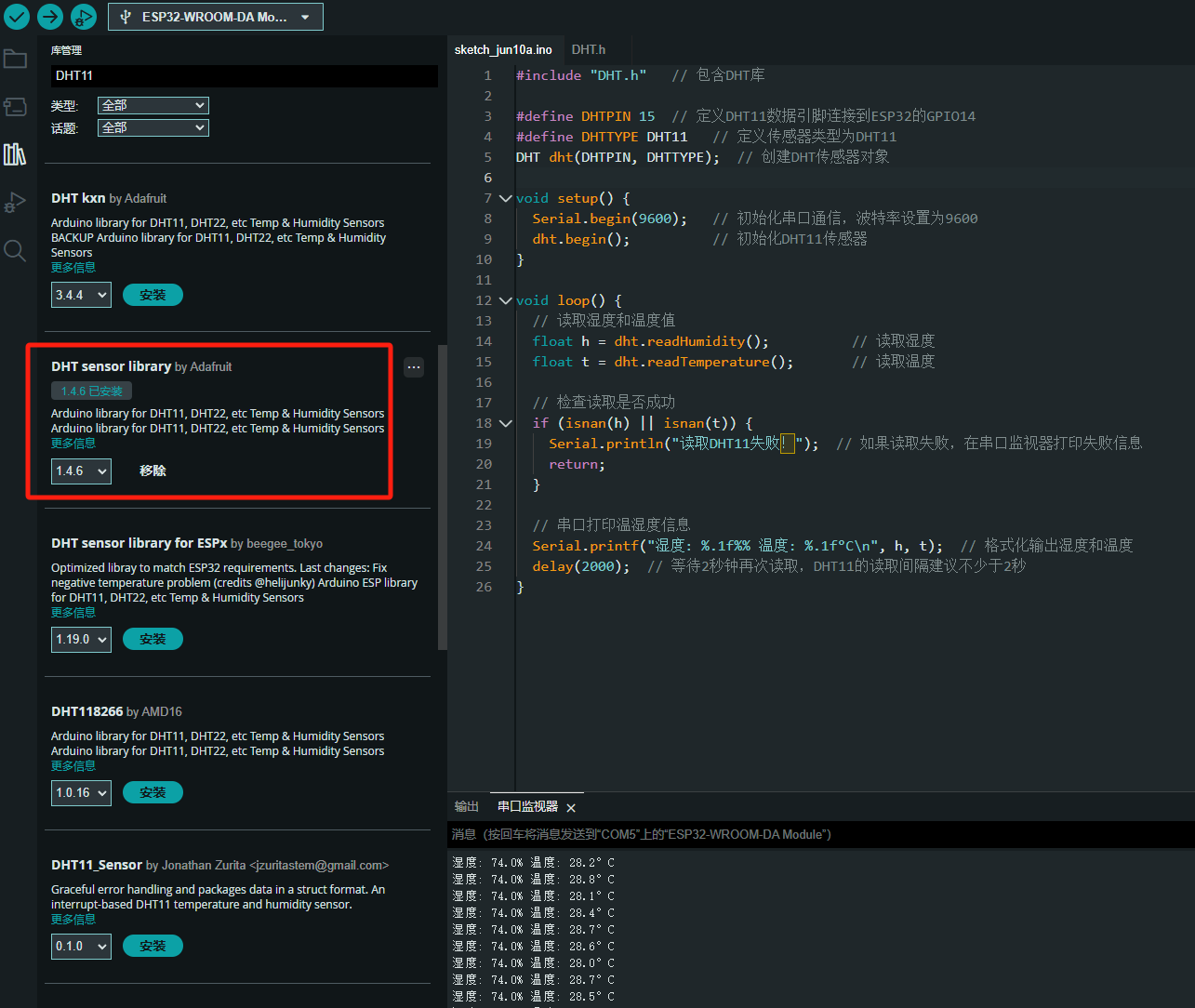
ESP32读取DHT11温湿度数据
芯片:ESP32 环境:Arduino 一、安装DHT11传感器库 红框的库,别安装错了 二、代码 注意,DATA口要连接在D15上 #include "DHT.h" // 包含DHT库#define DHTPIN 15 // 定义DHT11数据引脚连接到ESP32的GPIO15 #define D…...
vue3+vite项目中使用.env文件环境变量方法
vue3vite项目中使用.env文件环境变量方法 .env文件作用命名规则常用的配置项示例使用方法注意事项在vite.config.js文件中读取环境变量方法 .env文件作用 .env 文件用于定义环境变量,这些变量可以在项目中通过 import.meta.env 进行访问。Vite 会自动加载这些环境变…...

Mysql中select查询语句的执行过程
目录 1、介绍 1.1、组件介绍 1.2、Sql执行顺序 2、执行流程 2.1. 连接与认证 2.2. 查询缓存 2.3. 语法解析(Parser) 2.4、执行sql 1. 预处理(Preprocessor) 2. 查询优化器(Optimizer) 3. 执行器…...
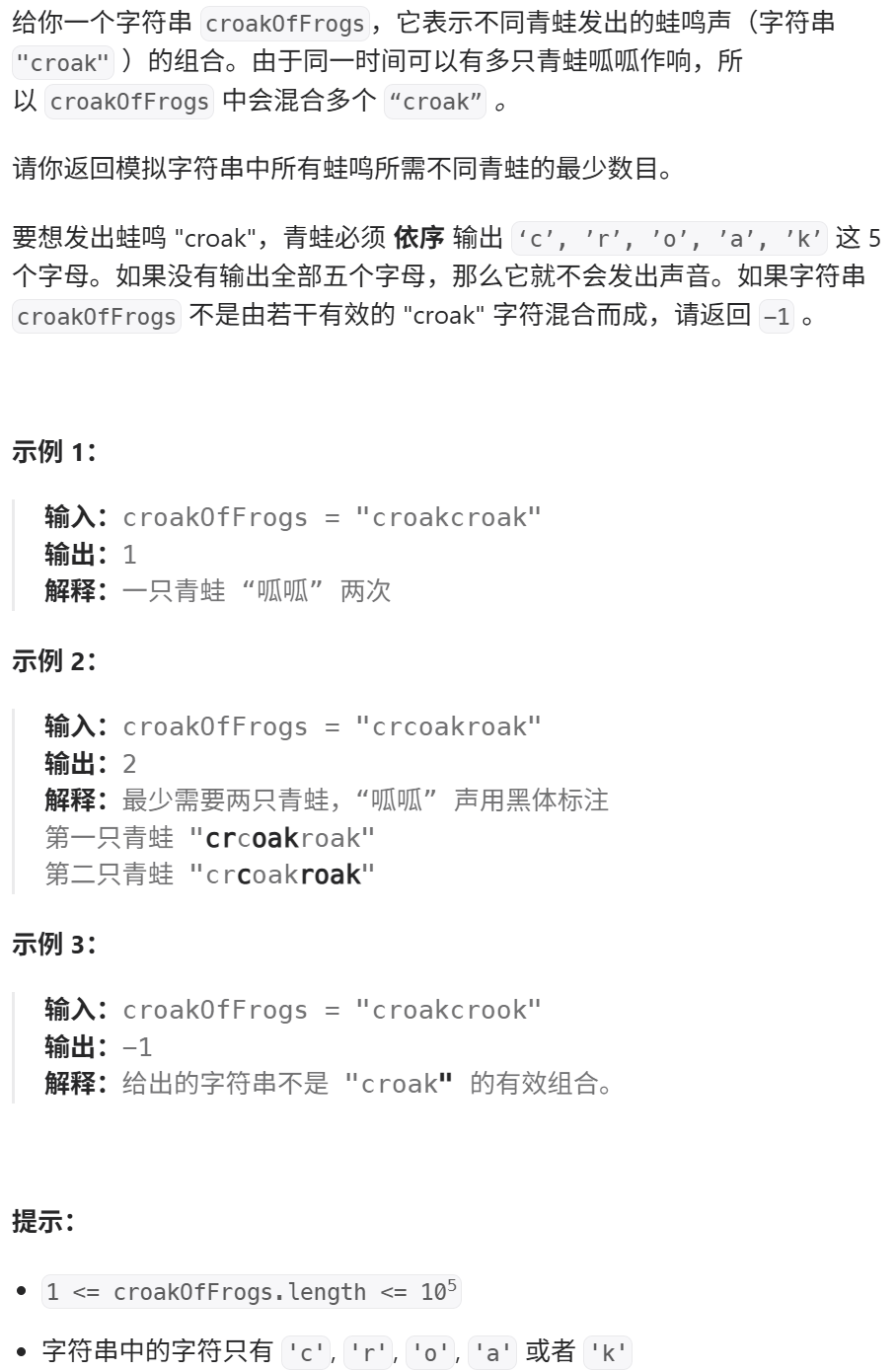
算法:模拟
1.替换所有的问号 1576. 替换所有的问号 - 力扣(LeetCode) 遍历字符串:通过外层循环逐一检查每个字符。遇到 ? 时处理: 内层循环遍历小写字母(a 到 z)。对每个字母检查是否满足: 与…...
推荐 github 项目:GeminiImageApp(图片生成方向,可以做一定的素材)
推荐 github 项目:GeminiImageApp(图片生成方向,可以做一定的素材) 这个项目能干嘛? 使用 gemini 2.0 的 api 和 google 其他的 api 来做衍生处理 简化和优化了文生图和图生图的行为(我的最主要) 并且有一些目标检测和切割(我用不到) 视频和 imagefx 因为没 a…...

「全栈技术解析」推客小程序系统开发:从架构设计到裂变增长的完整解决方案
在移动互联网营销竞争白热化的当下,推客小程序系统凭借其裂变传播、精准营销等特性,成为企业抢占市场的利器。本文将深度解析推客小程序系统开发的核心技术与实现路径,助力开发者打造具有市场竞争力的营销工具。 一、系统核心功能架构&…...