openpnp - 解决“底部相机高级校正成功后, 开机归零时,吸嘴自动校验失败的问题“
文章目录
- openpnp - 解决"底部相机高级校正成功后, 开机归零时,吸嘴自动校验失败的问题"
- 概述
- 笔记
- 问题现象1
- 问题现象2
- 原因分析
- 现在底部相机和吸嘴的位置偏差记录
- 修正底部相机位置
- 现在再看看NT1在底部相机中的位置
- 开机归零,看看是否能通过所有校验
- 配置备份很重要
- END
openpnp - 解决"底部相机高级校正成功后, 开机归零时,吸嘴自动校验失败的问题"
概述
和厂家同学讨论,他连轴的齿隙校正都不做。
经过和他的多次讨论,和自己的实验体会,才知道,因为他是做完设备初步校正后,就开始贴片。当然不需要做齿隙校正。
但是,只做设备的初步校验,设备的贴片精度和JOG控制精度要差很多。
必须做到底部相机高级校正之后,才能将设备的贴片精度和JOG控制精度提高到设备本身能达到的最高等级。
如果想让底部相机高级校正通过,就必须将齿隙校正做了,UI上有提示。
做了底部相机高级校正之后,和贴片相关的机械零件(顶部相机,底部相机,X, Y, Z, C1, C2)的安装偏差,就都被openpnp提供的补偿修正了。
我这边遇到一个新问题(以前也遇到过,不过不是每次都出现) : 底部相机高级校正后,用openpnp归零,home点校验没问题。但是2个吸嘴的自动开机校验都失败了。
以前遇到这种情况,因为自己是小白,也不知道咋处理好,只能很蠢的重新标定设备,一次标定就3个小时。标定完,这个问题也不一定会消失。
可怕的是,一旦增加了吸嘴,在NT1/NT2上装的不是设备标定时用的吸嘴的时候,还有可能会出现开机归零后的吸嘴校验失败问题。
现在用了openpnp很长时间了,一直在研究和体会openpnp的各种报错的现象。现在遇到问题,都能具体问题具体分析,确定解决问题的正确方向,然后确定出正确的具体解决方法,然后实验搞定。
被openpnp折腾怕了,在设备机械/电气零件都不移动的情况下,会在标定的每个重要节点结束后,退出openpnp, 做配置备份。
这个问题是可以重现的,这问题就好找了。

笔记
问题现象1

这个情况是相机曝光太低了,图像识别不出吸嘴。如果人眼就分辨不出吸嘴, opencv也不能分辨。

将底部相机曝光调节成既能看清吸嘴,又不至于过亮的值,我这里是-8.
这个曝光值不确定,和环境光的强弱有关系。白天和黑天的效果有点不一样,有可能是我的底部相机灯光不是很强引起的。
现在再用openpnp归零试试,是否能开机校验全部(一个home点,2个吸嘴)通过。
问题现象2

home点校验过了。
但是2个吸嘴还是校验失败
原因分析
在设备的初步校验中,有一步是底部相机初步校验。
就是将NT1移动到底部相机十字的中间开始的校验。
这步会记录底部相机的位置。
我很确定的记得,当时,是很准确的讲NT1吸嘴内部的中间对准了底部相机十字。
现在明显底部相机十字和吸嘴中心,差了不少。
出现这种情况的原因: 因为过了底部相机高级校验,有补偿存在,那么底部相机初步校验时的位置,应该发生了改变。
现在要尝试在当前情况(底部相机高级校正通过后)下, 修正底部相机的位置(通过顶部相机中心看到的底部相机中心要重合),然后再试试开机归零
现在底部相机和吸嘴的位置偏差记录
将吸嘴选为NT1, 然后在底部相机视图上右击,选择将当前吸嘴移动到底部相机中心。

将标尺刻度换为0.1mm, 可以看出,吸嘴中心和底部相机十字中心确实有偏差。
以底部相机十字为参考点,吸嘴X方向偏差为0.3mm, Y方向偏差0.5mm
修正底部相机位置
关掉顶部相机灯光,打开底部相机灯光。
用JOG面板,在顶部相机视图中,将顶部相机移动到底部相机的中心。
这个对齐必须在顶部相机中对齐,否则就不对了,因为吸嘴的偏移和顶部相机是固定的。
对齐时,用标尺不太好看,最好将光标改为圆圈,改合适的圆圈大小,可以套住顶部相机中看到的底部相机镜头的圆环。
这样对齐,比较准。

打开设备设置 => 相机 => 底部相机 => 位置
点击"学习"按钮,记录底部相机在顶部相机坐标中的位置,然后应用参数。

现在再看看NT1在底部相机中的位置
确认选择当前吸嘴是NT1
将NT1用底部相机的右键菜单功能, 移动到底部相机中心。


可以看到,现在NT1吸嘴内部中心区域已经在底部相机中心附近了,虽然还不是很精确,但是只要底部相机十字在吸嘴的内部区域中间就可以。
现在看看NT2和底部相机十字的位置关系。

现在底部相机十字也在NT2吸嘴内部区域中间。
这说明,底部相机的中心位置已经调整成功了,且定位精确性还可以。
开机归零,看看是否能通过所有校验

可以看到,归零后,home点校验成功。
吸嘴校验时,底部相机十字也始终在吸嘴内部区域的边缘位置移动,没有校验失败时哪种离的很远的感觉。

2个吸嘴都自动校验成功了。

且在校验完成后,可以看到底部相机十字最后停在NT2的中心。
那说明,这个问题的解决思路是对的,思路很清晰。
到此,这个问题(底部相机校正成功后, 开机归零时,吸嘴自动校验失败)被成功快速的搞定 😛
配置备份很重要
修正后的这个配置,就可以作为后续操作的基础配置了,备份一下不吃亏。
在openpnp中关机,退出openpnp, 进行配置文件的压缩备份。

备份的好处多多。
如果以后出现问题,就可以回到以前的重要节点上实验,看看问题是否存在。
如果改错了配置,也可以通过配置文件的比对,大致确定不对在哪里。
如果不做备份,万一配置文件坏了或不对了(自己配置失误或手误改了参数),就得重新标定设备,白白的浪费时间。
END
相关文章:
openpnp - 解决“底部相机高级校正成功后, 开机归零时,吸嘴自动校验失败的问题“
文章目录 openpnp - 解决"底部相机高级校正成功后, 开机归零时,吸嘴自动校验失败的问题"概述笔记问题现象1问题现象2原因分析现在底部相机和吸嘴的位置偏差记录修正底部相机位置现在再看看NT1在底部相机中的位置开机归零,看看是否能通过所有校…...

Python字幕滚动:为视频添加专业级动态效果!
Python实现由下向上滚动字幕 在数字媒体和编程领域,动态文本效果总能吸引观众的注意力。其中,滚动字幕是一种常见的视觉效果,经常用于视频、演示文稿和网页中。在Python中,我们可以通过多种方式来实现滚动字幕效果,比…...

Linux 系统中,将网络配置从 DHCP 改为静态 IP的几种方法
Linux 系统中,将网络配置从 DHCP 改为静态 IP 可以通过几种不同的方法来实现,下面是几种常见的方式: 方法一:使用 connman(Connection Manager) 如果你已经在使用 connman 管理网络,可以通过修…...

【jellyfin】解决Edge 浏览器播放 jellyfin 的 hevc/h265 视频“该客户端与媒体不兼容,服务器未发送兼容的媒体格式”错误
文章目录 问题原因分析解决方法 问题 在 windows 系统自带的 Edge 浏览器里网页播放 jellyfin 媒体库里的 hevc/h265 编码的视频时,总是提示 该客户端与媒体不兼容,服务器未发送兼容的媒体格式,无法播放视频。 原因分析 Edge 浏览器默认不…...

企业管理系统设计思路——毕业论文设计
根据企业对人事管理的要求,本系统可以实现以下目标: l 操作简单方便、界面简洁美观。 l 在查看员工信息时,可以对当前员工的家庭情况、培训情况进行添加、修改、删除的操作。 l 方便快捷的全方位数据查询。 l 按照指定的条件对员工进行统…...

Android 默认去掉URL网络校验,设置不进行网络校验
Android 系统连接WIFI显示网络连接受限分析处理_安卓13类原生系统网络受限-CSDN博客 package\modules\NetworkStack\src\com\android\networkstack\util\NetworkStackUtils.java public static final String CAPTIVE_PORTAL_MODE "captive_portal_mode"; //0 不…...

Python | Leetcode Python题解之第515题在每个树行中找最大值
题目: 题解: class Solution:def largestValues(self, root: Optional[TreeNode]) -> List[int]:if root is None:return []ans []q [root]while q:maxVal -inftmp qq []for node in tmp:maxVal max(maxVal, node.val)if node.left:q.append(n…...

Java泛型:类型安全的艺术
Java泛型是JDK 5中引入的一项重要特性,它为Java带来了类型安全的机制,极大地提升了代码的可读性和可维护性。泛型允许程序员在编译时检测非法类型,从而避免了运行时的ClassCastException异常,使得代码更加健壮和可靠。 泛型的基本…...

Redis 淘汰策略 问题
前言 相关系列 《Redis & 目录》(持续更新)《Redis & 淘汰策略 & 源码》(学习过程/多有漏误/仅作参考/不再更新)《Redis & 淘汰策略 & 总结》(学习总结/最新最准/持续更新)《Redis &a…...

技术成神之路:设计模式(二十二)命令模式
相关文章:技术成神之路:二十三种设计模式(导航页) 介绍 命令模式(Command Pattern)是一种行为设计模式,允许将请求(命令)封装为对象,从而使您可以使用不同的请求、队列或记录请求日…...

facebook账号类型有哪些?
Facebook的主要账号类型 在Facebook上,用户可以基于不同的目的和需求创建不同类型的账号,主要包括以下几类: 1. 个人账号 这是最常见的Facebook账号类型,每个用户都可以创建一个个人账号,分享生活动态、与朋友互动、…...
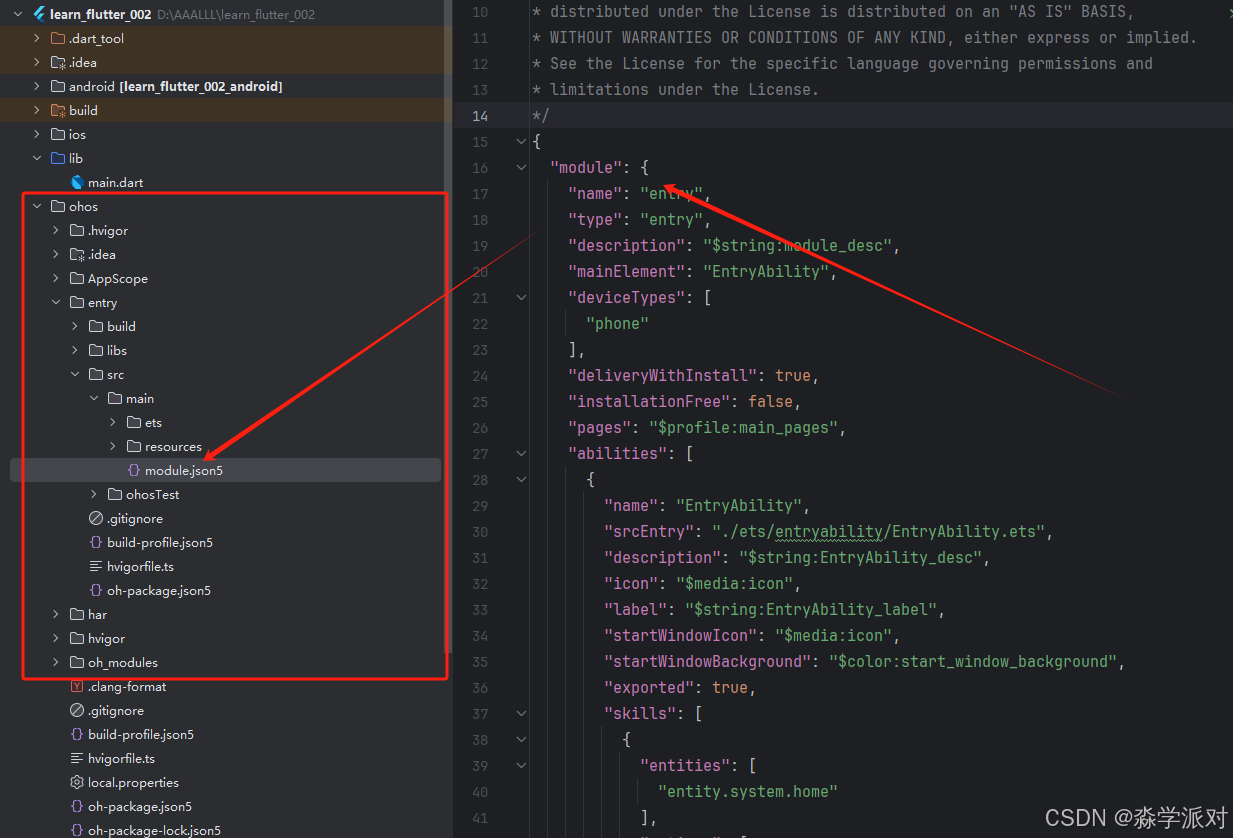
Flutter鸿蒙next 中如何实现 WebView【跳、显、适、反】等一些基础问题
✅近期推荐:求职神器 https://bbs.csdn.net/topics/619384540 🔥欢迎大家订阅系列专栏:flutter_鸿蒙next 💬淼学派语录:只有不断的否认自己和肯定自己,才能走出弯曲不平的泥泞路,因为平坦的大路…...

机器视觉:9点标定的原理与实现
一、什么是标定 标定就是将机器视觉处理得到的像素坐标转换成实际项目中使用到的毫米坐标。简单说即使看看实际单位距离内有几个像素,如下图所示,10mm的距离内有222个像素,那像素坐标和实际的毫米坐标就有个比例关系了。 二、九点标定 9点标…...

《深度学习》 了解YOLO基本知识
目录 一、关于YOLO 1、什么是YOLO 2、经典的检测方法 1)one-stage单阶段检测 模型指标介绍: 2)two-stage多阶段检测 二、关于mAP指标 1、概念 2、IOU 3、关于召回率和准确率 4、示例 5、计算mAP 一、关于YOLO 1、什么是YOLO YOL…...

什么是Kubernetes?K8s基础与工作原理
什么是 Kubernetes(K8s)? Kubernetes,通常简称为 K8s,是一个用于自动化部署、扩展和管理容器化应用程序的开源容器编排平台。它由 Google 于 2014 年开源,后来交由 CNCF(Cloud Native Computin…...

HTML5新增属性
1、HTML5 1.1 新增布局标签 header:用于定义文档或者section的页眉;footer:用于定义页面或section的底部信息;nav:用于定位页面上的导航链接部分;article:用于定位文档或者页面中的独立部分&a…...
---持续更新)
软件开发术语(E开头)---持续更新
e—business 电子商务EAI (enterprise application integration)企业应用程序集成(整合)EBCO (empty base class optimization) 空基类优化(机制)Edge and Vertex Connectivity 割边/割点 Edge Coloring 边染色 EDI (Dlectronic Data Interchange)电子数据交换effic…...

多机器人编队避障算法(1)
文章目录 前言一、基于感知的避障1.基于感知的Epuck2避障思路(理论)2.基于感知的Epuck2避障实现(现实)3.距离传感器结合红外传感器修复避障Bug4.问题5.代码逻辑图 二、基于人工势场力的避障1.基于人工势场的Epuck2避障思路(理论)2.基于人工势场力的Epuck2避障实现(现实) 三、两…...

【网站项目】SpringBoot401超市收银系统
🙊作者简介:拥有多年开发工作经验,分享技术代码帮助学生学习,独立完成自己的项目或者毕业设计。 代码可以私聊博主获取。🌹赠送计算机毕业设计600个选题excel文件,帮助大学选题。赠送开题报告模板ÿ…...

KD树详解:多维数据高效搜索的利器
摘要 在处理多维数据时,如何高效地进行搜索与查询成为一个关键问题。KD树(K-Dimensional Tree)作为一种高效的多维数据结构,广泛应用于计算机视觉、机器人导航、数据库检索等领域。本文将详细介绍KD树的基本概念、结构、构建算法…...

【网络】每天掌握一个Linux命令 - iftop
在Linux系统中,iftop是网络管理的得力助手,能实时监控网络流量、连接情况等,帮助排查网络异常。接下来从多方面详细介绍它。 目录 【网络】每天掌握一个Linux命令 - iftop工具概述安装方式核心功能基础用法进阶操作实战案例面试题场景生产场景…...

应用升级/灾备测试时使用guarantee 闪回点迅速回退
1.场景 应用要升级,当升级失败时,数据库回退到升级前. 要测试系统,测试完成后,数据库要回退到测试前。 相对于RMAN恢复需要很长时间, 数据库闪回只需要几分钟。 2.技术实现 数据库设置 2个db_recovery参数 创建guarantee闪回点,不需要开启数据库闪回。…...
VB.net复制Ntag213卡写入UID
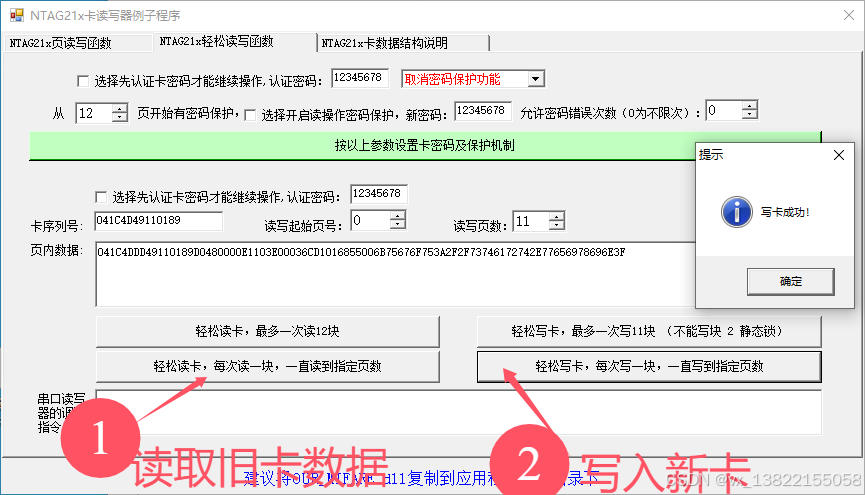
本示例使用的发卡器:https://item.taobao.com/item.htm?ftt&id615391857885 一、读取旧Ntag卡的UID和数据 Private Sub Button15_Click(sender As Object, e As EventArgs) Handles Button15.Click轻松读卡技术支持:网站:Dim i, j As IntegerDim cardidhex, …...

PAN/FPN
import torch import torch.nn as nn import torch.nn.functional as F import mathclass LowResQueryHighResKVAttention(nn.Module):"""方案 1: 低分辨率特征 (Query) 查询高分辨率特征 (Key, Value).输出分辨率与低分辨率输入相同。"""def __…...
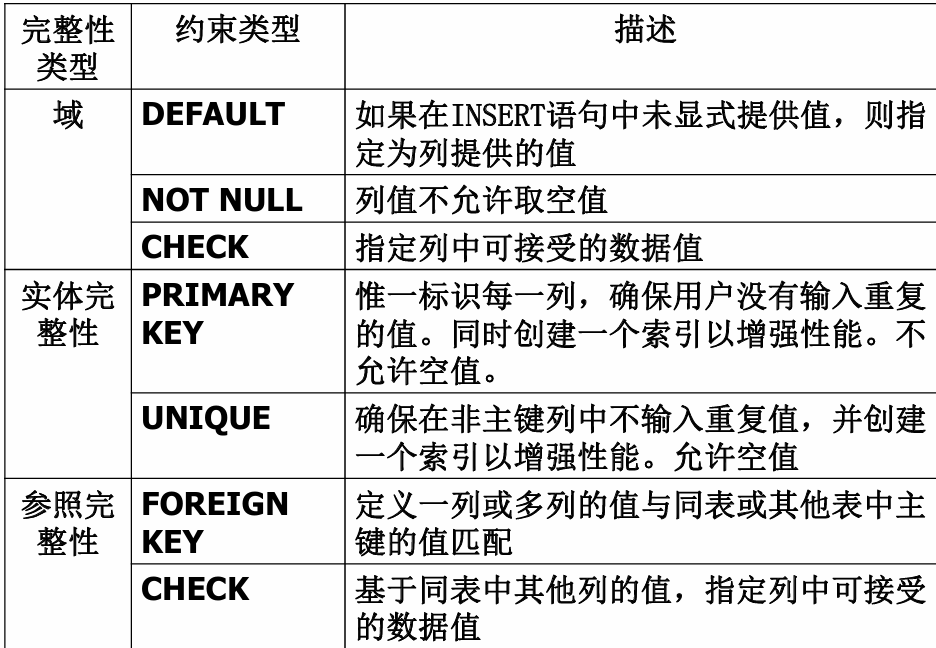
七、数据库的完整性
七、数据库的完整性 主要内容 7.1 数据库的完整性概述 7.2 实体完整性 7.3 参照完整性 7.4 用户定义的完整性 7.5 触发器 7.6 SQL Server中数据库完整性的实现 7.7 小结 7.1 数据库的完整性概述 数据库完整性的含义 正确性 指数据的合法性 有效性 指数据是否属于所定…...
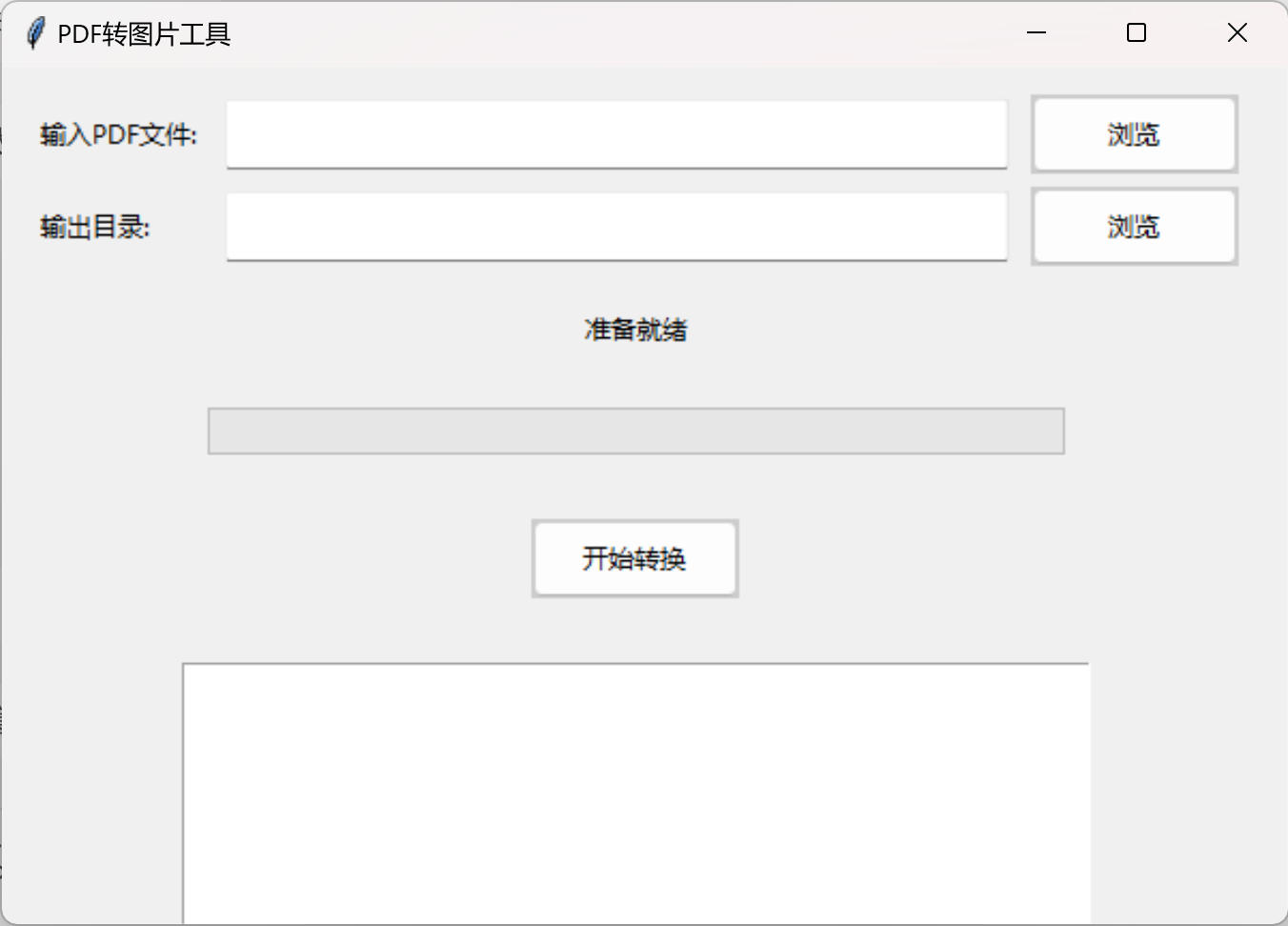
免费PDF转图片工具
免费PDF转图片工具 一款简单易用的PDF转图片工具,可以将PDF文件快速转换为高质量PNG图片。无需安装复杂的软件,也不需要在线上传文件,保护您的隐私。 工具截图 主要特点 🚀 快速转换:本地转换,无需等待上…...
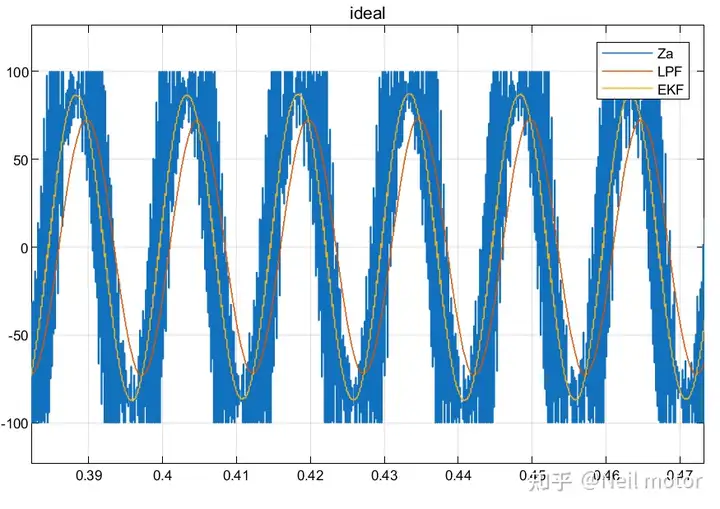
永磁同步电机无速度算法--基于卡尔曼滤波器的滑模观测器
一、原理介绍 传统滑模观测器采用如下结构: 传统SMO中LPF会带来相位延迟和幅值衰减,并且需要额外的相位补偿。 采用扩展卡尔曼滤波器代替常用低通滤波器(LPF),可以去除高次谐波,并且不用相位补偿就可以获得一个误差较小的转子位…...

深度学习之模型压缩三驾马车:模型剪枝、模型量化、知识蒸馏
一、引言 在深度学习中,我们训练出的神经网络往往非常庞大(比如像 ResNet、YOLOv8、Vision Transformer),虽然精度很高,但“太重”了,运行起来很慢,占用内存大,不适合部署到手机、摄…...

边缘计算网关提升水产养殖尾水处理的远程运维效率
一、项目背景 随着水产养殖行业的快速发展,养殖尾水的处理成为了一个亟待解决的环保问题。传统的尾水处理方式不仅效率低下,而且难以实现精准监控和管理。为了提升尾水处理的效果和效率,同时降低人力成本,某大型水产养殖企业决定…...
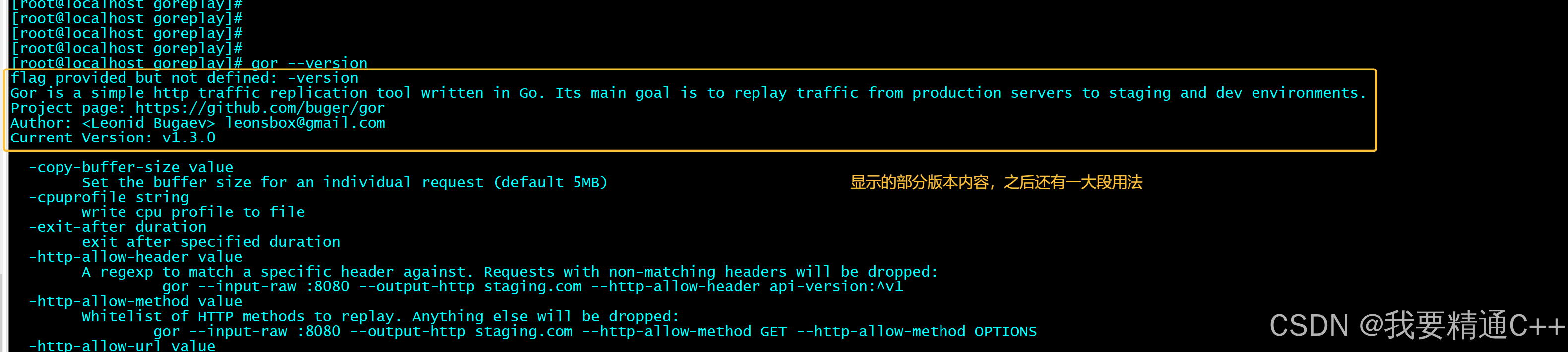
goreplay
1.github地址 https://github.com/buger/goreplay 2.简单介绍 GoReplay 是一个开源的网络监控工具,可以记录用户的实时流量并将其用于镜像、负载测试、监控和详细分析。 3.出现背景 随着应用程序的增长,测试它所需的工作量也会呈指数级增长。GoRepl…...