MoveIt 控制自己的真实机械臂【2】——编写 action server 端代码
完成了 MoveIt 这边 action client 的基本配置,MoveIt 理论上可以将规划好的 trajectory 以 action 的形式发布出来了,浅浅尝试一下,在 terminal 中运行 roslaunch xmate7_moveit_config_new demo.launch

报错提示他在等待 xmate_arm_controller/follow_joint_trajectory 这个 action sever 的到来,显然,他等的好辛苦,却还是没有等来所期待的人,最终遗憾地告诉大家,以 xmate_arm_controller/follow_joint_trajectory 为 action 名称的 action client 端没有被连接。
此时,rostopic list 一下:
hjs@hjs:~/new_xmate7pro_ws$ rostopic list
/attached_collision_object
/collision_object
/execute_trajectory/cancel
/execute_trajectory/feedback
/execute_trajectory/goal
/execute_trajectory/result
/execute_trajectory/status
/head_mount_kinect/depth_registered/points
/joint_states
/move_group/cancel
/move_group/display_contacts
/move_group/display_cost_sources
/move_group/display_grasp_markers
/move_group/display_planned_path
/move_group/feedback
/move_group/filtered_cloud
/move_group/goal
/move_group/monitored_planning_scene
/move_group/motion_plan_request
/move_group/ompl/parameter_descriptions
/move_group/ompl/parameter_updates
/move_group/plan_execution/parameter_descriptions
/move_group/plan_execution/parameter_updates
/move_group/planning_scene_monitor/parameter_descriptions
/move_group/planning_scene_monitor/parameter_updates
/move_group/result
/move_group/sense_for_plan/parameter_descriptions
/move_group/sense_for_plan/parameter_updates
/move_group/status
/move_group/trajectory_execution/parameter_descriptions
/move_group/trajectory_execution/parameter_updates
/pickup/cancel
/pickup/feedback
/pickup/goal
/pickup/result
/pickup/status
/place/cancel
/place/feedback
/place/goal
/place/result
/place/status
/planning_scene
/planning_scene_world
/real_controller_joint_states
/recognized_object_array
/rosout
/rosout_agg
/rviz_hjs_12716_2381460729014530723/motionplanning_planning_scene_monitor/parameter_descriptions
/rviz_hjs_12716_2381460729014530723/motionplanning_planning_scene_monitor/parameter_updates
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/feedback
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update_full
/tf
/tf_static
/trajectory_execution_event
发现根本没有 xmate_arm_controller/follow_joint_trajectory 这个名称的 action 发布出来。
想想也能理解,MoveIt 端的 action client 苦苦等了好久的另一半(action server),action server 却终究没有出现和给出回应,那么action client自然也就,没有必要再将自己的爱意(xmate_arm_controller/follow_joint_trajectory) 表达出来了。
言归正传,之前在 Gazebo 中虚拟仿真的时候,是 Gazebo 的 ros_control 插件充当了 action server 的角色,让 MoveIt 端的 client 和 Gazebo 端的 server 建立了 action 通信连接;那么现在,针对真实机械臂,没有人再充当 action server 的角色了,自然也就没有 follow_joint_trajectory 发布出来,所以下一步要做的就是自己编写一个 Movet 端的 action client 所倾慕的 action server ,并为它们牵线(配置接口),介绍它们认识(建立连接),进而实现 follow_joint_trajectory 的发布和接收。
关于 ROS action 相关知识的学习自行补上,我编写的 action server 节点如下:
# include <ros/ros.h>
# include <actionlib/server/simple_action_server.h>
# include <control_msgs/FollowJointTrajectoryAction.h>
# include <std_msgs/Float32MultiArray.h>
# include <iostream>
# include <moveit_msgs/RobotTrajectory.h>using namespace std;
// 重命名类型为 Server
typedef actionlib::SimpleActionServer<control_msgs::FollowJointTrajectoryAction> Server;// 用于存储 moveit 发送出来的轨迹数据
moveit_msgs::RobotTrajectory moveit_tra;void execute_callback(const control_msgs::FollowJointTrajectoryGoalConstPtr& goalPtr, Server* moveit_server)
{// 1、解析提交的目标值int n_joints = goalPtr->trajectory.joint_names.size();int n_tra_Points = goalPtr->trajectory.points.size();moveit_tra.joint_trajectory.header.frame_id = goalPtr->trajectory.header.frame_id;moveit_tra.joint_trajectory.joint_names = goalPtr->trajectory.joint_names;moveit_tra.joint_trajectory.points.resize(n_tra_Points);for(int i=0; i<n_tra_Points; i++) // 遍历每组路点{moveit_tra.joint_trajectory.points[i].positions.resize(n_joints);moveit_tra.joint_trajectory.points[i].velocities.resize(n_joints);moveit_tra.joint_trajectory.points[i].accelerations.resize(n_joints);moveit_tra.joint_trajectory.points[i].time_from_start = goalPtr->trajectory.points[i].time_from_start;for(int j=0;j<n_joints; j++) // 遍历每组路点中的每个关节数据{moveit_tra.joint_trajectory.points[i].positions[j] = goalPtr->trajectory.points[i].positions[j];moveit_tra.joint_trajectory.points[i].velocities[j] = goalPtr->trajectory.points[i].velocities[j];moveit_tra.joint_trajectory.points[i].accelerations[j] = goalPtr->trajectory.points[i].accelerations[j];}}cout << "The trajectory data is:" << "********************************************" << endl;cout << moveit_tra;cout << "********************************************" << "The trajectory data is finished printing." << endl;ROS_INFO("The number of joints is %d.",n_joints);ROS_INFO("The waypoints number of the trajectory is %d.",n_tra_Points);ROS_INFO("Receive trajectory successfully");moveit_server->setSucceeded();
}int main(int argc, char *argv[])
{ros::init(argc,argv,"moveit_action_server");ros::NodeHandle nh;// 创建 action 对象(NodeHandle,话题名称,回调函数解析传入的目标值,服务器是否自启动)Server moveit_server(nh,"xmate_arm_controller/follow_joint_trajectory", boost::bind(&execute_callback, _1, &moveit_server), false);// 手动启动服务器moveit_server.start();ros::spin();return 0;
}
该节点实现的功能就是:
启动了一个 xmate_arm_controller/follow_joint_trajectory 名称的 action server,而正是这个名称的 action,才是 MoveIt 端的 action client 所喜欢的,具体原因见上一篇博客5、创建 ros_controllers.yaml 文件;
在启动的 action server 回调函数中解析了 MoveIt 规划的轨迹数据,并把该轨迹数据存储到了 moveit_msgs::RobotTrajectory 类型的变量 moveit_tra 中。
验证:
terminal 1:roscore;
terminal 2: 启动 action server 节点,rosrun xmate7_demo moveit_action_server;
此时 rostopic list 结果:

terminal 3: 启动 action client 节点,roslaunch xmate7_moveit_config_new demo.launch;
此时,终端不会报错,而且提示
[ INFO] [1658643437.543320231]: Added FollowJointTrajectory controller for xmate_arm_controller
将 Rviz 中的拖动球拖动,点击 Plan & Excute 会发现 terminal 2会按照我所写代码打印出 MoveIt 的轨迹数据。


可见,MoveIt 规划的轨迹,让机械臂从 home 姿态运动到目标姿态生成了 33 个路点,对应每个路点的位置、速度、加速度以及时间戳也都解析到了 moveit_tra 这个变量中了,以上验证表明我们自己实现的 action server 代码实现了和 MoveIt 端 action client 的 connect,并且拿到了 MoveIt 规划出来的轨迹数据。顺其自然,为了实现用 MoveIt 控制自己的真实机械臂的宏图大业,当然下一步就是将我们拿到的 trajectory 数据作为指令数据发送给真实的机械臂去执行,这将在下一篇文章中描述。
另外,上述示例 action server 代码实现方式比较简单,还可以将 action server 封装成类的形式,在类中编写回调函数,丰富 action 机制的使用接口,在类中初始化 action 对象可参照action 官网
相关文章:
MoveIt 控制自己的真实机械臂【2】——编写 action server 端代码
完成了 MoveIt 这边 action client 的基本配置,MoveIt 理论上可以将规划好的 trajectory 以 action 的形式发布出来了,浅浅尝试一下,在 terminal 中运行 roslaunch xmate7_moveit_config_new demo.launch 报错提示他在等待 xmate_arm_control…...

C#制作学生管理系统
定义学生类 定义一个简单的类来表示学生,包括学号、姓名、性别、年龄、电话、地址。再给其添加一个方法利于后续添加方法查看学生信息。 //定义学生类 public class student {public int ID { get; set; }//开放读写权限public string Name { get; set; }public i…...

python Pandas合并(单元格、sheet、excel )
安装 Pandas 和 openpyxl 首先,确保已经安装了 Pandas 和 openpyxl。可以通过 pip 安装: pip install pandas openpyxl 创建 DataFrame import pandas as pd # 创建 DataFrame df1 pd.DataFrame({ 姓名: [张三, 李四, 王五], 年龄: [25, 30, 35]…...

OJ在线编程常见输入输出练习【JavaScript】
(注:本文是对【JavaScript Node 】 ACM模式,常见输入输出练习相关内容的介绍!!!) 牛客竞赛_ACM/NOI/CSP/CCPC/ICPC算法编程高难度练习赛_牛客竞赛OJ 一、ACM模式下的编辑页面 二、ACM模式下&a…...

新能源汽车空调系统:绿色出行的舒适保障
在新能源汽车迅速发展的今天,空调系统作为提升驾乘舒适度的重要组成部分,发挥着不可或缺的作用。新能源汽车空调系统主要由压缩机、冷凝器、节流装置和蒸发器四大件组成,它们协同工作,为车内提供适宜的温度和湿度环境。 一、压缩…...

Date工具类详细汇总-Date日期相关方法
# 1024程序员节 | 征文 # 目录 简介 Date工具类单元测试 Date工具类 简介 本文章是个人总结实际工作中常用到的Date工具类,主要包含Java-jdk8以下版本的Date相关使用方法,可以方便的在工作中灵活的应用,在个人工作期间频繁使用这些时间的格…...

TMUX1308PWR规格书 数据手册 具有注入电流控制功能的 5V 双向 8:1单通道和 4:1 双通道多路复用器芯片
TMUX1308 和 TMUX1309 为通用互补金属氧化物半导体 (CMOS) 多路复用器 (MUX)。TMUX1308 是 8:1单通道(单端)多路复用器,而 TMUX1309 是 4:1 双通道(差分)多路复用器。这些器件可在源极 (Sx) 和漏极 (Dx) 引脚上支持从 …...

证件照怎么换底色?简单又快速!不看后悔
一、引言 证件照在我们的生活中有着广泛的应用,无论是求职、考试还是办理各种证件,都需要用到不同底色的证件照。传统的换底色方法往往比较复杂,需要一定的专业技能和软件操作经验。但是现在,有了更简单快捷的方法,让你…...

Rust 基础语法与常用特性
Rust 跨界:全面掌握跨平台应用开发 第一章:快速上手 Rust 1.2 基础语法与常用特性 1.2.1 数据类型与控制流 数据类型 Rust 提供了丰富的内置数据类型,主要分为标量类型和复合类型。 标量类型 标量类型表示单一的值,Rust 中…...
一、开发环境的搭建
环境搭建步骤: 下载软件安装软件运行软件 其他: Visual studio 安装包文件:https://www.alipan.com/s/nd5RgzD4e3b 下载软件 在浏览器中搜索Visual studio,选择如图的选项 点击该区域,进入该页面,【或…...

Docker:存储原理
Docker:存储原理 镜像联合文件系统overlay镜像存储结构容器存储结构 存储卷绑定挂载存储卷结构 镜像 联合文件系统 联合文件系统Union File System是一种分层,轻量且高效的文件系统。其将整个文件系统分为多个层,层与层之间进行覆盖&#x…...

ts:数组的常用方法(push、pop、shift、unshift、splice、slice)
前端css中filter的使用 一、主要内容说明二、例子(一)、push方法(尾添加)1.源码1 (push方法)2.源码1运行效果 (二)、pop方法(尾删除)1.源码2(pop方…...

物联网网关确保设备安全
物联网(IoT)网关在确保设备安全方面扮演着至关重要的角色。 作为连接物联网设备和云端或企业系统的中介,物联网网关可以实施多种安全措施来保护设备和数据。 是物联网网关确保设备安全的关键方法: 1. 设备认证和授权 认证&…...
Vue学习笔记(五)
Class绑定 数据绑定的一个常见需求场景式操纵元素的CSS class列表,因为class是attribute,我们可以和其他attribute一样使用v-bind将它们和动态的字符串绑定。但是,在处理比较复杂的绑定时,通过拼接生成字符串是麻烦且易出错的。因此…...

Nestjs返回格式小结
在 NestJS 中,除了 text/event-stream(用于 Server-Sent Events)之外,还有多种格式的返回方式,具体取决于你的应用需求。以下是一些常见的返回格式及其示例: 1. JSON 格式 Get(json) getJsonResponse(Res…...
【力扣刷题实战】相同的树
大家好,我是小卡皮巴拉 文章目录 目录 力扣题目: 相同的树 题目描述 示例 1: 示例 2: 示例 3: 解题思路 题目理解 算法选择 具体思路 解题要点 完整代码(C语言) 兄弟们共勉 &#…...

Golang | Leetcode Golang题解之第515题在每个树行中找最大值
题目: 题解: func largestValues(root *TreeNode) (ans []int) {if root nil {return}q : []*TreeNode{root}for len(q) > 0 {maxVal : math.MinInt32tmp : qq nilfor _, node : range tmp {maxVal max(maxVal, node.Val)if node.Left ! nil {q …...

Zookeeper 对于 Kafka 的作用是什么?
大家好,我是锋哥。今天分享关于【Zookeeper 对于 Kafka 的作用是什么?】面试题?希望对大家有帮助; Zookeeper 对于 Kafka 的作用是什么? 1000道 互联网大厂Java工程师 精选面试题-Java资源分享网 ZooKeeper 在 Kafka…...

Thread类及线程的核心操作
一. Thread类的常见构造方法 1. Thread() Thread类无参的构造方法, 用于创建Thread类的实例对象. 2. Thread(String name) 带一个参数的Thread类构造方法, 创建一个线程对象, 并给其命名. [注]: 如果不专门给线程命名, 那么线程默认的名字就是Thread-0, Thread-1, Thread-…...

算法|牛客网华为机试11-20C++
牛客网华为机试 上篇:算法|牛客网华为机试1-10C 文章目录 HJ11 数字颠倒HJ12 字符串反转HJ13 句子逆序HJ14 字符串排序HJ15 求int型正整数在内存中存储时1的个数HJ16 购物单HJ17 坐标移动HJ18 识别有效的IP地址和掩码并进行分类统计HJ19 简单错误记录HJ20 密码验证…...

利用最小二乘法找圆心和半径
#include <iostream> #include <vector> #include <cmath> #include <Eigen/Dense> // 需安装Eigen库用于矩阵运算 // 定义点结构 struct Point { double x, y; Point(double x_, double y_) : x(x_), y(y_) {} }; // 最小二乘法求圆心和半径 …...

conda相比python好处
Conda 作为 Python 的环境和包管理工具,相比原生 Python 生态(如 pip 虚拟环境)有许多独特优势,尤其在多项目管理、依赖处理和跨平台兼容性等方面表现更优。以下是 Conda 的核心好处: 一、一站式环境管理:…...
idea大量爆红问题解决
问题描述 在学习和工作中,idea是程序员不可缺少的一个工具,但是突然在有些时候就会出现大量爆红的问题,发现无法跳转,无论是关机重启或者是替换root都无法解决 就是如上所展示的问题,但是程序依然可以启动。 问题解决…...
: K8s 核心概念白话解读(上):Pod 和 Deployment 究竟是什么?)
云原生核心技术 (7/12): K8s 核心概念白话解读(上):Pod 和 Deployment 究竟是什么?
大家好,欢迎来到《云原生核心技术》系列的第七篇! 在上一篇,我们成功地使用 Minikube 或 kind 在自己的电脑上搭建起了一个迷你但功能完备的 Kubernetes 集群。现在,我们就像一个拥有了一块崭新数字土地的农场主,是时…...
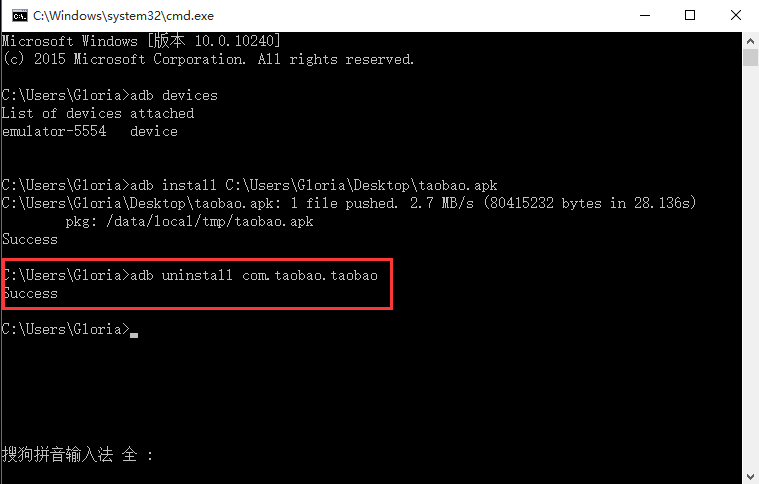
Appium+python自动化(十六)- ADB命令
简介 Android 调试桥(adb)是多种用途的工具,该工具可以帮助你你管理设备或模拟器 的状态。 adb ( Android Debug Bridge)是一个通用命令行工具,其允许您与模拟器实例或连接的 Android 设备进行通信。它可为各种设备操作提供便利,如安装和调试…...
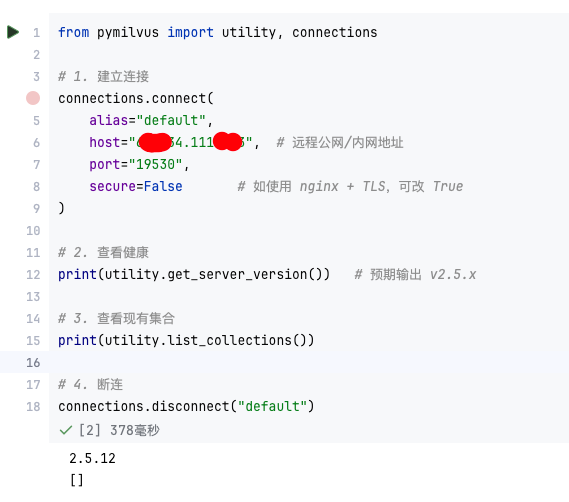
【大模型RAG】Docker 一键部署 Milvus 完整攻略
本文概要 Milvus 2.5 Stand-alone 版可通过 Docker 在几分钟内完成安装;只需暴露 19530(gRPC)与 9091(HTTP/WebUI)两个端口,即可让本地电脑通过 PyMilvus 或浏览器访问远程 Linux 服务器上的 Milvus。下面…...

抖音增长新引擎:品融电商,一站式全案代运营领跑者
抖音增长新引擎:品融电商,一站式全案代运营领跑者 在抖音这个日活超7亿的流量汪洋中,品牌如何破浪前行?自建团队成本高、效果难控;碎片化运营又难成合力——这正是许多企业面临的增长困局。品融电商以「抖音全案代运营…...

linux 错误码总结
1,错误码的概念与作用 在Linux系统中,错误码是系统调用或库函数在执行失败时返回的特定数值,用于指示具体的错误类型。这些错误码通过全局变量errno来存储和传递,errno由操作系统维护,保存最近一次发生的错误信息。值得注意的是,errno的值在每次系统调用或函数调用失败时…...
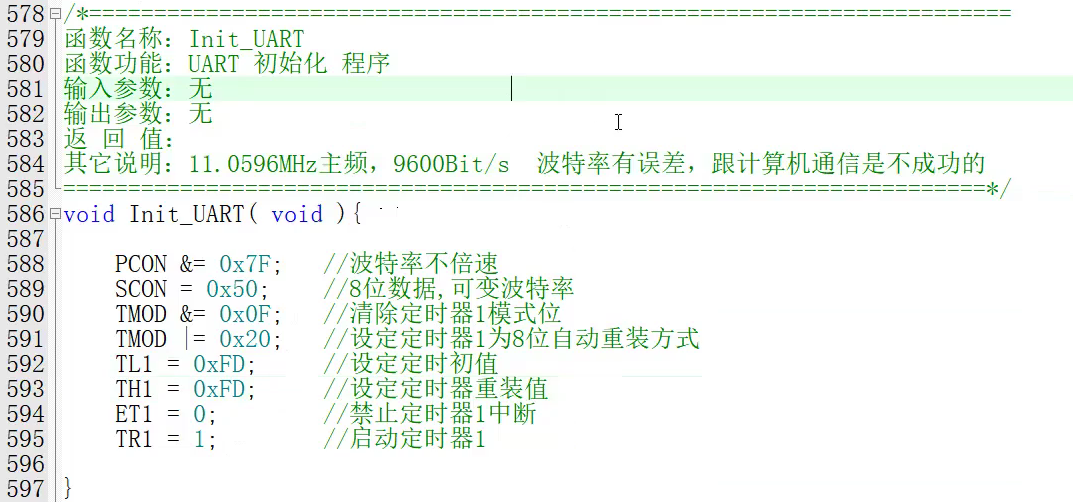
【单片机期末】单片机系统设计
主要内容:系统状态机,系统时基,系统需求分析,系统构建,系统状态流图 一、题目要求 二、绘制系统状态流图 题目:根据上述描述绘制系统状态流图,注明状态转移条件及方向。 三、利用定时器产生时…...

MySQL用户和授权
开放MySQL白名单 可以通过iptables-save命令确认对应客户端ip是否可以访问MySQL服务: test: # iptables-save | grep 3306 -A mp_srv_whitelist -s 172.16.14.102/32 -p tcp -m tcp --dport 3306 -j ACCEPT -A mp_srv_whitelist -s 172.16.4.16/32 -p tcp -m tcp -…...