基于YOLO11/v10/v8/v5深度学习的煤矿传送带异物检测系统设计与实现【python源码+Pyqt5界面+数据集+训练代码】
《------往期经典推荐------》
一、AI应用软件开发实战专栏【链接】
| 项目名称 | 项目名称 |
|---|---|
| 1.【人脸识别与管理系统开发】 | 2.【车牌识别与自动收费管理系统开发】 |
| 3.【手势识别系统开发】 | 4.【人脸面部活体检测系统开发】 |
| 5.【图片风格快速迁移软件开发】 | 6.【人脸表表情识别系统】 |
| 7.【YOLOv8多目标识别与自动标注软件开发】 | 8.【基于YOLOv8深度学习的行人跌倒检测系统】 |
| 9.【基于YOLOv8深度学习的PCB板缺陷检测系统】 | 10.【基于YOLOv8深度学习的生活垃圾分类目标检测系统】 |
| 11.【基于YOLOv8深度学习的安全帽目标检测系统】 | 12.【基于YOLOv8深度学习的120种犬类检测与识别系统】 |
| 13.【基于YOLOv8深度学习的路面坑洞检测系统】 | 14.【基于YOLOv8深度学习的火焰烟雾检测系统】 |
| 15.【基于YOLOv8深度学习的钢材表面缺陷检测系统】 | 16.【基于YOLOv8深度学习的舰船目标分类检测系统】 |
| 17.【基于YOLOv8深度学习的西红柿成熟度检测系统】 | 18.【基于YOLOv8深度学习的血细胞检测与计数系统】 |
| 19.【基于YOLOv8深度学习的吸烟/抽烟行为检测系统】 | 20.【基于YOLOv8深度学习的水稻害虫检测与识别系统】 |
| 21.【基于YOLOv8深度学习的高精度车辆行人检测与计数系统】 | 22.【基于YOLOv8深度学习的路面标志线检测与识别系统】 |
| 23.【基于YOLOv8深度学习的智能小麦害虫检测识别系统】 | 24.【基于YOLOv8深度学习的智能玉米害虫检测识别系统】 |
| 25.【基于YOLOv8深度学习的200种鸟类智能检测与识别系统】 | 26.【基于YOLOv8深度学习的45种交通标志智能检测与识别系统】 |
| 27.【基于YOLOv8深度学习的人脸面部表情识别系统】 | 28.【基于YOLOv8深度学习的苹果叶片病害智能诊断系统】 |
| 29.【基于YOLOv8深度学习的智能肺炎诊断系统】 | 30.【基于YOLOv8深度学习的葡萄簇目标检测系统】 |
| 31.【基于YOLOv8深度学习的100种中草药智能识别系统】 | 32.【基于YOLOv8深度学习的102种花卉智能识别系统】 |
| 33.【基于YOLOv8深度学习的100种蝴蝶智能识别系统】 | 34.【基于YOLOv8深度学习的水稻叶片病害智能诊断系统】 |
| 35.【基于YOLOv8与ByteTrack的车辆行人多目标检测与追踪系统】 | 36.【基于YOLOv8深度学习的智能草莓病害检测与分割系统】 |
| 37.【基于YOLOv8深度学习的复杂场景下船舶目标检测系统】 | 38.【基于YOLOv8深度学习的农作物幼苗与杂草检测系统】 |
| 39.【基于YOLOv8深度学习的智能道路裂缝检测与分析系统】 | 40.【基于YOLOv8深度学习的葡萄病害智能诊断与防治系统】 |
| 41.【基于YOLOv8深度学习的遥感地理空间物体检测系统】 | 42.【基于YOLOv8深度学习的无人机视角地面物体检测系统】 |
| 43.【基于YOLOv8深度学习的木薯病害智能诊断与防治系统】 | 44.【基于YOLOv8深度学习的野外火焰烟雾检测系统】 |
| 45.【基于YOLOv8深度学习的脑肿瘤智能检测系统】 | 46.【基于YOLOv8深度学习的玉米叶片病害智能诊断与防治系统】 |
| 47.【基于YOLOv8深度学习的橙子病害智能诊断与防治系统】 | 48.【基于深度学习的车辆检测追踪与流量计数系统】 |
| 49.【基于深度学习的行人检测追踪与双向流量计数系统】 | 50.【基于深度学习的反光衣检测与预警系统】 |
| 51.【基于深度学习的危险区域人员闯入检测与报警系统】 | 52.【基于深度学习的高密度人脸智能检测与统计系统】 |
| 53.【基于深度学习的CT扫描图像肾结石智能检测系统】 | 54.【基于深度学习的水果智能检测系统】 |
| 55.【基于深度学习的水果质量好坏智能检测系统】 | 56.【基于深度学习的蔬菜目标检测与识别系统】 |
| 57.【基于深度学习的非机动车驾驶员头盔检测系统】 | 58.【太基于深度学习的阳能电池板检测与分析系统】 |
| 59.【基于深度学习的工业螺栓螺母检测】 | 60.【基于深度学习的金属焊缝缺陷检测系统】 |
| 61.【基于深度学习的链条缺陷检测与识别系统】 | 62.【基于深度学习的交通信号灯检测识别】 |
| 63.【基于深度学习的草莓成熟度检测与识别系统】 | 64.【基于深度学习的水下海生物检测识别系统】 |
| 65.【基于深度学习的道路交通事故检测识别系统】 | 66.【基于深度学习的安检X光危险品检测与识别系统】 |
| 67.【基于深度学习的农作物类别检测与识别系统】 | 68.【基于深度学习的危险驾驶行为检测识别系统】 |
| 69.【基于深度学习的维修工具检测识别系统】 | 70.【基于深度学习的维修工具检测识别系统】 |
| 71.【基于深度学习的建筑墙面损伤检测系统】 |
二、机器学习实战专栏【链接】,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
五、YOLOv8改进专栏【链接】,持续更新中~~
六、YOLO性能对比专栏【链接】,持续更新中~
《------正文------》
基本功能演示
基于YOLO11/v10/v8/v5深度学习的煤矿传送带异物检测系统设计与实现【python源码+Pyqt5界面+数据集+训练代码】
摘要:煤矿开采过程中,传送带是运输煤炭的关键设备之一。然而,在实际运作中,传送带上可能会出现非煤炭物质,即“异物”,如机械零件或其他大块物体,这些异物不仅会损坏传送带本身,还可能引起严重的安全事故,甚至导致生产中断。本文基于
YOLOv11/v10/v8/v5的深度学习框架,通过3089张实际场景中煤矿传送带异物的相关图片,训练了可进行煤矿传送带异物目标检测的模型,可以分别检测2种类别:['异物部件','大块物体'],同时全面对比分析了YOLOv5n、YOLOv8n、YOLOv10n、YOLO11这4种模型在验证集上的评估性能表现。最终基于训练好的模型制作了一款带UI界面的煤矿传送带异物检测系统,更便于进行功能的展示。该系统是基于python与PyQT5开发的,支持图片、视频以及摄像头进行目标检测,并保存检测结果。本文提供了完整的Python代码和使用教程,给感兴趣的小伙伴参考学习,完整的代码资源文件获取方式见文末。
文章目录
- 基本功能演示
- 研究背景
- 主要工作内容
- 一、软件核心功能介绍及效果演示
- 软件主要功能
- 界面参数设置说明
- 检测结果说明
- 主要功能说明
- (1)图片检测说明
- (2)视频检测说明
- (3)摄像头检测说明
- (4)保存图片与视频检测说明
- 二、YOLOv5/v8/v10/11介绍
- 二、模型训练、评估与推理
- 1. 数据集准备与训练
- 2.模型训练
- 3. 训练结果评估
- 4. 使用模型进行推理
- 三、YOLOv5/v8/v10/11性能对比分析
- 1.常用评估参数介绍
- 2. 模型训练过程对比
- 3.各模型性能评估
- 4.模型总体性能对比
- 四、可视化系统制作
- Pyqt5详细介绍
- 系统制作
- 【获取方式】
点击跳转至文末《完整相关文件及源码》获取
研究背景
煤矿开采过程中,传送带是运输煤炭的关键设备之一。然而,在实际运作中,传送带上可能会出现非煤炭物质,即“异物”,如机械零件或其他大块物体,这些异物不仅会损坏传送带本身,还可能引起严重的安全事故,甚至导致生产中断。基于YOLO深度学习框架开发的煤矿传送带异物检测系统,能够自动识别并分类两种主要类型的异物——异物部件和大块物体,这对于保障煤矿安全生产、提高生产效率以及减少维护成本具有极其重要的意义。
其主要应用场景有:
实时监控与警报:在煤矿生产线上安装该系统后,可以持续监控传送带运行状态,一旦检测到异物立即发出警报,促使工作人员迅速采取措施移除异物,避免潜在的安全事故。
预防性维护:通过长期收集的数据分析,该系统可以帮助企业更好地理解哪些环节容易产生异物,并据此采取相应预防措施,比如改善矿井内部环境或加强员工培训。
质量控制:除了防止异物进入下一加工阶段外,该系统还可以辅助于原料筛选过程,确保最终产品的纯净度。
事故调查:如果不幸发生了与传送带相关的事故,此系统提供的记录可以作为重要证据,帮助分析事故原因,从而采取有效措施防止类似事件再次发生。
远程管理:对于大型矿业集团来说,通过中央控制系统接入该异物检测功能,可以实现对分布在各地矿山传送带状况的远程监控,便于统一调度资源处理紧急情况。
总之,煤矿传送带异物检测系统的建立极大地提高了矿区作业的安全水平,减少了因异物引起的故障停机时间和经济损失。它不仅仅是一种简单的监控手段,更是推动煤炭行业向智能化转型的重要组成部分。通过集成先进的人工智能技术,该系统为实现更加安全高效的采矿作业提供了强有力的技术支撑。随着人工智能技术的不断发展,相信未来这类系统将会变得更加智能化、可靠化,成为保障矿山安全运营不可或缺的一部分。
主要工作内容
本文的主要内容包括以下几个方面:
搜集与整理数据集:搜集整理实际场景中煤矿传送带异物的相关数据图片,并进行相应的数据处理,为模型训练提供训练数据集;训练模型:基于整理的数据集,根据最前沿的YOLOv11/v10/v8/v5目标检测技术训练目标检测模型,实现对需要检测的对象进行有效检测的功能;模型性能对比:对训练出的4种模型在验证集上进行了充分的结果评估和对比分析,主要目的是为了揭示每个模型在关键指标(如Precision、Recall、mAP50和mAP50-95等指标)上的优劣势。这不仅帮助我们在实际应用中选择最适合特定需求的模型,还能够指导后续模型优化和调优工作,以期获得更高的检测准确率和速度。最终,通过这种系统化的对比和分析,我们能更好地理解模型的鲁棒性、泛化能力以及在不同类别上的检测表现,为开发更高效的计算机视觉系统提供坚实的基础。可视化系统制作:基于训练出的目标检测模型,搭配Pyqt5制作的UI界面,用python开发了一款界面简洁的软件系统,可支持图片、视频以及摄像头检测,同时可以将图片或者视频检测结果进行保存。其目的是为检测系统提供一个用户友好的操作平台,使用户能够便捷、高效地进行检测任务。
软件初始界面如下图所示:

检测结果界面如下:

一、软件核心功能介绍及效果演示
软件主要功能
1. 可用于常见煤矿传送带异物检测与识别,分为2个检测类别:['异物部件','大块物体'];
2. 支持图片、视频及摄像头进行检测,同时支持图片的批量检测;
3. 界面可实时显示目标位置、目标总数、置信度、用时等信息;
4. 支持图片或者视频的检测结果保存;
5. 支持将图片的检测结果保存为csv文件;
界面参数设置说明

置信度阈值:也就是目标检测时的conf参数,只有检测出的目标框置信度大于该值,结果才会显示;
交并比阈值:也就是目标检测时的iou参数,对检测框重叠比例iou大于该阈值的目标框进行过滤【也就是说假如两检测框iou大于该值的话,会过滤掉其中一个,该值越小,重叠框会越少】;
检测结果说明

显示标签名称与置信度:表示是否在检测图片上标签名称与置信度,显示默认勾选,如果不勾选则不会在检测图片上显示标签名称与置信度;
总目标数:表示画面中检测出的目标数目;
目标选择:可选择单个目标进行位置信息、置信度查看。
目标位置:表示所选择目标的检测框,左上角与右下角的坐标位置。默认显示的是置信度最大的一个目标信息;
主要功能说明
功能视频演示见文章开头,以下是简要的操作描述。
(1)图片检测说明
点击打开图片按钮,选择需要检测的图片,或者点击打开文件夹按钮,选择需要批量检测图片所在的文件夹,操作演示如下:
点击目标下拉框后,可以选定指定目标的结果信息进行显示。
点击保存按钮,会对检测结果进行保存,存储路径为:save_data目录下,同时会将图片检测信息保存csv文件。
注:1.右侧目标位置默认显示置信度最大一个目标位置,可用下拉框进行目标切换。所有检测结果均在左下方表格中显示。
(2)视频检测说明
点击视频按钮,打开选择需要检测的视频,就会自动显示检测结果,再次点击可以关闭视频。
点击保存按钮,会对视频检测结果进行保存,存储路径为:save_data目录下。
(3)摄像头检测说明
点击打开摄像头按钮,可以打开摄像头,可以实时进行检测,再次点击,可关闭摄像头。
(4)保存图片与视频检测说明
点击保存按钮后,会将当前选择的图片【含批量图片】或者视频的检测结果进行保存,对于图片图片检测还会保存检测结果为csv文件,方便进行查看与后续使用。检测的图片与视频结果会存储在save_data目录下。
【注:暂不支持视频文件的检测结果保存为csv文件格式。】
保存的检测结果文件如下:

图片文件保存的csv文件内容如下,包括图片路径、目标在图片中的编号、目标类别、置信度、目标坐标位置。
注:其中坐标位置是代表检测框的左上角与右下角两个点的x、y坐标。

二、YOLOv5/v8/v10/11介绍
关于YOLOv5/v8/v10/v11模型的详细介绍可以参考之前分享的博客文章《YOLOv5/v8/v10/v11详细介绍:网络结构,创新点》,地址:
https://a-xu-ai.blog.csdn.net/article/details/143272589

二、模型训练、评估与推理
本文主要基于YOLOv5n、YOLOv8n、YOLOv10n、YOLO11n这4种模型进行模型的训练,训练完成后对4种模型在验证集上的表现进行全面的性能评估及对比分析。模型训练和评估流程基本一致,包括:数据集准备、模型训练、模型评估。
下面主要以最新的YOLO11为例进行训练过程的详细讲解,YOLOv5、YOLOv8与YOLOv10的训练过程类似。
1. 数据集准备与训练
通过网络上搜集关于实际场景中煤矿传送带异物的相关图片,并使用Labelimg标注工具对每张图片进行标注,分2个检测类别,分别是['异物部件','大块物体']。
最终数据集一共包含3089张图片,其中训练集包含2421张图片,验证集包含442张图片,测试集包含226张图片。
部分图像及标注如下图所示:



数据集各类别数目分布情况如下:

2.模型训练
准备好数据集后,将图片数据以如下格式放置在项目目录中。在项目目录中新建datasets目录,同时将检测的图片分为训练集与验证集放入Data目录下。

同时我们需要新建一个data.yaml文件,用于存储训练数据的路径及模型需要进行检测的类别。YOLOv11在进行模型训练时,会读取该文件的信息,用于进行模型的训练与验证。data.yaml的具体内容如下:
train: D:\2MyCVProgram\2DetectProgram\ForeignObjectDetection_v11\datasets\Data\train
val: D:\2MyCVProgram\2DetectProgram\ForeignObjectDetection_v11\datasets\Data\valid
test: D:\2MyCVProgram\2DetectProgram\ForeignObjectDetection_v11\datasets\Data\testnc: 2
names: ['bolt', 'bulk']
注:train与val后面表示需要训练图片的路径,建议直接写自己文件的绝对路径。
数据准备完成后,通过调用train.py文件进行模型训练,epochs参数用于调整训练的轮数,batch参数用于调整训练的批次大小【根据内存大小调整,最小为1】,optimizer设定的优化器为SGD,训练代码如下:
#coding:utf-8
from ultralytics import YOLO
import matplotlib
matplotlib.use('TkAgg')# 模型配置文件
model_yaml_path = "ultralytics/cfg/models/11/yolo11.yaml"
#数据集配置文件
data_yaml_path = 'datasets/Data/data.yaml'
#预训练模型
pre_model_name = 'yolo11n.pt'if __name__ == '__main__':#加载预训练模型model = YOLO(model_yaml_path).load(pre_model_name)#训练模型results = model.train(data=data_yaml_path,epochs=150, # 训练轮数batch=4, # batch大小name='train_v11', # 保存结果的文件夹名称optimizer='SGD') # 优化器
模型常用训练超参数参数说明:
YOLO11 模型的训练设置包括训练过程中使用的各种超参数和配置。这些设置会影响模型的性能、速度和准确性。关键的训练设置包括批量大小、学习率、动量和权重衰减。此外,优化器、损失函数和训练数据集组成的选择也会影响训练过程。对这些设置进行仔细的调整和实验对于优化性能至关重要。
以下是一些常用的模型训练参数和说明:
| 参数名 | 默认值 | 说明 |
|---|---|---|
model | None | 指定用于训练的模型文件。接受指向 .pt 预训练模型或 .yaml 配置文件。对于定义模型结构或初始化权重至关重要。 |
data | None | 数据集配置文件的路径(例如 coco8.yaml).该文件包含特定于数据集的参数,包括训练数据和验证数据的路径、类名和类数。 |
epochs | 100 | 训练总轮数。每个epoch代表对整个数据集进行一次完整的训练。调整该值会影响训练时间和模型性能。 |
patience | 100 | 在验证指标没有改善的情况下,提前停止训练所需的epoch数。当性能趋于平稳时停止训练,有助于防止过度拟合。 |
batch | 16 | 批量大小,有三种模式:设置为整数(例如,’ Batch =16 ‘), 60% GPU内存利用率的自动模式(’ Batch =-1 ‘),或指定利用率分数的自动模式(’ Batch =0.70 ')。 |
imgsz | 640 | 用于训练的目标图像尺寸。所有图像在输入模型前都会被调整到这一尺寸。影响模型精度和计算复杂度。 |
device | None | 指定用于训练的计算设备:单个 GPU (device=0)、多个 GPU (device=0,1)、CPU (device=cpu),或苹果芯片的 MPS (device=mps). |
workers | 8 | 加载数据的工作线程数(每 RANK 多 GPU 训练)。影响数据预处理和输入模型的速度,尤其适用于多 GPU 设置。 |
name | None | 训练运行的名称。用于在项目文件夹内创建一个子目录,用于存储训练日志和输出结果。 |
pretrained | True | 决定是否从预处理模型开始训练。可以是布尔值,也可以是加载权重的特定模型的字符串路径。提高训练效率和模型性能。 |
optimizer | 'auto' | 为训练模型选择优化器。选项包括 SGD, Adam, AdamW, NAdam, RAdam, RMSProp 等,或 auto 用于根据模型配置进行自动选择。影响收敛速度和稳定性 |
lr0 | 0.01 | 初始学习率(即 SGD=1E-2, Adam=1E-3) .调整这个值对优化过程至关重要,会影响模型权重的更新速度。 |
lrf | 0.01 | 最终学习率占初始学习率的百分比 = (lr0 * lrf),与调度程序结合使用,随着时间的推移调整学习率。 |
3. 训练结果评估
在深度学习中,我们通常用损失函数下降的曲线来观察模型训练的情况。YOLOv11在训练时主要包含三个方面的损失:定位损失(box_loss)、分类损失(cls_loss)和动态特征损失(dfl_loss),在训练结束后,可以在runs/目录下找到训练过程及结果文件,如下所示:

各损失函数作用说明:
定位损失box_loss:预测框与标定框之间的误差(GIoU),越小定位得越准;
分类损失cls_loss:计算锚框与对应的标定分类是否正确,越小分类得越准;
动态特征损失(dfl_loss):DFLLoss是一种用于回归预测框与目标框之间距离的损失函数。在计算损失时,目标框需要缩放到特征图尺度,即除以相应的stride,并与预测的边界框计算Ciou Loss,同时与预测的anchors中心点到各边的距离计算回归DFLLoss。
本文训练结果如下:

我们通常用PR曲线来体现精确率和召回率的关系,本文训练结果的PR曲线如下。mAP表示Precision和Recall作为两轴作图后围成的面积,m表示平均,@后面的数表示判定iou为正负样本的阈值。mAP@.5:表示阈值大于0.5的平均mAP,可以看到本文模型目标检测的mAP@0.5值为0.911,结果还是不错的。

模型验证集上的评估结果如下:

4. 使用模型进行推理
模型训练完成后,我们可以得到一个最佳的训练结果模型best.pt文件,在runs/train/weights目录下。我们可以使用该文件进行后续的推理检测。
图片检测代码如下:
#coding:utf-8
from ultralytics import YOLO
import cv2# 所需加载的模型目录
path = 'models/best.pt'
# 需要检测的图片地址
img_path = "TestFiles/-_000915_0722_jpg.rf.198e7cd98460e7108583bcdee64a03aa.jpg"# 加载预训练模型
model = YOLO(path, task='detect')# 检测图片
results = model(img_path)
print(results)
res = results[0].plot()
# res = cv2.resize(res,dsize=None,fx=2,fy=2,interpolation=cv2.INTER_LINEAR)
cv2.imshow("YOLOv8 Detection", res)
cv2.waitKey(0)
执行上述代码后,会将执行的结果直接标注在图片上,结果如下:

更多检测结果示例如下:


三、YOLOv5/v8/v10/11性能对比分析
本文在介绍的数据集上分别训练了YOLOv5n、YOLOv8n、YOLOv10n、YOLO11n这4种模型用于对比分析,训练轮数为150个epoch。主要分析这4种模型的训练结果在Precision(精确度)、Recall(召回率)、mAP50、mAP50-95、F1-score等性能指标上的表现,以选出更适合本数据集的最优模型。
4种模型基本信息如下:
| Model | size (pixels) | mAPval 50-95 | params (M) | FLOPs (B) |
|---|---|---|---|---|
| YOLOv5n | 640 | 34.3 | 2.6 | 7.7 |
| YOLOv8n | 640 | 37.3 | 3.2 | 8.7 |
| YOLOv10n | 640 | 38.5 | 2.7 | 6.7 |
| YOLOv11n | 640 | 39.5 | 2.6 | 6.5 |
FlOPs(floating point operations):浮点运算次数,用于衡量算法/模型的复杂度。
params (M):表示模型的参数量
这3种模型都是各个YOLO系列种最小尺寸结构的模型,在模型参数与计算量上都相差不大,属于同一个级别的模型,因此能够进行横向的对比分析。
1.常用评估参数介绍

-
Precision(精确度):
-
精确度是针对预测结果的准确性进行衡量的一个指标,它定义为预测为正例(即预测为目标存在)中真正正例的比例。
-
公式:

-
其中,TP(True Positives)是正确预测为正例的数量,FP(False Positives)是错误预测为正例的数量。
-
-
Recall(召回率):
-
召回率衡量的是模型检测到所有实际正例的能力,即预测为正例的样本占所有实际正例的比例。
-
公式:

-
其中,FN(False Negatives)是错误预测为负例(即漏检)的数量。
-
-
mAP50(平均精度,Mean Average Precision at Intersection over Union 0.5):
- mAP50是目标检测中一个非常重要的指标,它衡量的是模型在IoU(交并比)阈值为0.5时的平均精度。IoU是一个衡量预测边界框与真实边界框重叠程度的指标。
- mAP50通常在多个类别上计算,然后取平均值,得到整体的平均精度。
- 计算方法:对于每个类别,首先计算在IoU阈值为0.5时的精度-召回率曲线(Precision-Recall Curve),然后计算曲线下的面积(AUC),最后对所有类别的AUC取平均值。
这三个指标共同提供了对目标检测模型性能的全面评估:
- 精确度(Box_P)关注预测的准确性,即减少误检(FP)。
- 召回率(Box_R)关注检测的完整性,即减少漏检(FN)。
- mAP50提供了一个平衡精确度和召回率的指标,同时考虑了模型在不同类别上的表现。
在实际应用中,根据具体需求,可能会更侧重于精确度或召回率,例如在需要减少误报的场合,可能会更重视精确度;而在需要确保所有目标都被检测到的场合,可能会更重视召回率。mAP50作为一个综合指标,能够帮助研究者和开发者平衡这两个方面,选择最合适的模型。
- mAP50-95:
- 这是衡量目标检测模型在不同IoU阈值下性能的指标。IoU是预测的边界框与真实边界框之间的重叠程度,mAP50-95计算了从IoU为0.5到0.95的范围内,模型的平均精度。
- 精度-召回率曲线在不同的IoU阈值上绘制,然后计算曲线下的面积(AUC),最后取这些AUC的平均值,得到mAP50-95。
- 这个指标反映了模型在不同匹配严格度下的性能,对于评估模型在实际应用中的泛化能力非常重要。
- F1分数:
-
这是精确度和召回率的调和平均数,能够平衡两者的影响,是一个综合考虑精确度和召回率的指标。
-
公式:

-
当精确度和召回率差距较大时,F1分数能够提供一个更全面的模型性能评估。
-
2. 模型训练过程对比
YOLOv5n、YOLOv8n、YOLOv10n、YOLO11n这4种模型的训练过程损失曲线与性能曲线如下。
训练过程的损失曲线对比如下:

训练过程中的精确度(Precision)、召回率(Recall)、平均精确度(Mean Average Precision, mAP)等参数的对比如下:

直观的从曲线上看,4种模型在模型精度上看,差别不是很大。下面对具体的性能数值进行详细分析。
3.各模型性能评估
在YOLOv5n、YOLOv8n、YOLOv10n、YOLO11n这3种模型训练完成后,我们可以通过验证集对各个模型分别进行性能评估。
YOLOv5n模型在验证集上的性能评估结果如下:

表格列说明:
Class:表示模型的检测类别名称;
Images:表示验证集图片数目;
Instances:表示在所有图片中目标数;
P:表示精确度Precison;
R:表示召回率Recall;
mAP50:表示IoU(交并比)阈值为0.5时的平均精度。
mAP50-95:表示从IoU为0.5到0.95的范围内【间隔0.05】,模型的平均精度。
表格行说明:
第一行all,除Instances是
所有类别目标数之和,其他参数表示所有类别对应列参数的平均值;
其他行,表示每一个类别对应参数的值。
YOLOv8n模型在验证集上的性能评估结果如下:

YOLOv10n模型在验证集上的性能评估结果如下:

YOLO11模型在验证集上的性能评估结果如下:

4.模型总体性能对比
下面我们从总体的平均指标上对YOLOv5n、YOLOv8n、YOLOv10n、YOLO11n这4种模型进行对比分析。
下表是YOLOv5n、YOLOv8n、YOLOv10n、YOLO11n这4不同模型目标检测结果的整体性能平均指标对比情况:
| Model | Precision | Recall | mAP50 | mAP50-95 | F1-score |
|---|---|---|---|---|---|
| YOLOv5n | 88.10 | 80.30 | 89.90 | 59.50 | 84.00 |
| YOLOv8n | 84.90 | 82.80 | 89.10 | 58.70 | 83.80 |
| YOLOv10n | 85.70 | 76.50 | 87.50 | 57.70 | 80.80 |
| YOLO11n | 86.30 | 81.90 | 91.10 | 60.30 | 84.00 |
为了方便更加直观的查看与对比各个结果,同样我们将表格绘制成图表的形式进行分析。

从上述数据中,我们可以看出:
-
在精确率(Precision)方面,YOLOv5n模型表现出色,其精确率高达88.10%,位居首位。相比之下,YOLOv8n模型的精确率最低,为84.90%,这表明在所有被预测为正例的样本中,YOLOv5n模型具有最高的准确度。
-
当考虑召回率(Recall)时,YOLOv8n模型的表现最为突出,其召回率达到了82.80%,领先于其他模型。而YOLOv10n模型的召回率最低,仅为76.50%,这意味着在所有实际为正类的样本中,YOLOv8n模型具有最高的识别能力。
-
在平均精度@IoU=0.5(mAP50)的评估指标上,YOLO11n模型取得了最佳成绩,其mAP50达到了91.10%。相反,YOLOv10n模型在这一指标上的表现最差,mAP50为87.50%,显示出YOLO11n模型在IoU阈值为0.5时具有更高的精度。
-
对于平均精度@IoU=0.5-0.95(mAP50-95)的评估,YOLO11n模型同样表现优异,其mAP50-95达到了60.30%,位居第一。而YOLOv10n模型的表现最差,仅有57.70%,这表明在不同IoU阈值下,YOLO11n模型具有更稳定的性能和更好的效果。
-
从F1分数(F1-score)的角度来看,YOLOv5n和YOLO11n模型并列第一,均获得了84.00%的F1-score。YOLOv10n模型以80.80%的F1-score排在最后,说明在精确率和召回率的综合评价中,YOLOv5n和YOLO11n模型的表现最为出色。
当然,我们除了从整体的平均指标上对比之外,也可以单独对比相同类别在不同模型上的指标表现,以查看不同模型在各个类别上的优劣势。 此处不再赘述。
结论:
基于模型的评估结果来看,YOLO11n整体来看似乎是最优秀的模型,在大多数评测指标上都取得了最好的成绩或接近最好的成绩,是最佳选择。
四、可视化系统制作
基于上述训练出的目标检测模型,为了给此检测系统提供一个用户友好的操作平台,使用户能够便捷、高效地进行检测任务。博主基于Pyqt5开发了一个可视化的系统界面,通过图形用户界面(GUI),用户可以轻松地在图片、视频和摄像头实时检测之间切换,无需掌握复杂的编程技能即可操作系统。【系统详细展示见第一部分内容】
Pyqt5详细介绍
关于Pyqt5的详细介绍可以参考之前的博客文章:《Python中的Pyqt5详细介绍:基本机构、部件、布局管理、信号与槽、跨平台》,地址:
https://a-xu-ai.blog.csdn.net/article/details/143273797
系统制作
博主基于Pyqt5框架开发了此款煤矿传送带异物检测系统,即文中第一部分的演示内容,能够很好的支持图片、视频及摄像头进行检测,同时支持检测结果的保存。
通过图形用户界面(GUI),用户可以轻松地在图片、视频和摄像头实时检测之间切换,无需掌握复杂的编程技能即可操作系统。这不仅提升了系统的可用性和用户体验,还使得检测过程更加直观透明,便于结果的实时观察和分析。此外,GUI还可以集成其他功能,如检测结果的保存与导出、检测参数的调整,从而为用户提供一个全面、综合的检测工作环境,促进智能检测技术的广泛应用。

关于该系统涉及到的完整源码、UI界面代码、数据集、训练代码、训练好的模型、测试图片视频等相关文件,均已打包上传,感兴趣的小伙伴可以通过下载链接自行获取。
【获取方式】

本文涉及到的完整全部程序文件:包括python源码、数据集、训练好的结果文件、训练代码、UI源码、测试图片视频等(见下图),获取方式见文末:

注意:该代码基于Python3.9开发,运行界面的主程序为
MainProgram.py,其他测试脚本说明见上图。为确保程序顺利运行,请按照程序运行说明文档txt配置软件运行所需环境。
相关文章:
基于YOLO11/v10/v8/v5深度学习的煤矿传送带异物检测系统设计与实现【python源码+Pyqt5界面+数据集+训练代码】
《------往期经典推荐------》 一、AI应用软件开发实战专栏【链接】 项目名称项目名称1.【人脸识别与管理系统开发】2.【车牌识别与自动收费管理系统开发】3.【手势识别系统开发】4.【人脸面部活体检测系统开发】5.【图片风格快速迁移软件开发】6.【人脸表表情识别系统】7.【…...

mysql-workbench 导入csv格式数据报错:Unhandled exception: Could not determine delimiter
xlsx文件中第二行某个单元格有换行符,csv文件中用双引号包起来了,但是python 在采样的时候,只读了前两行,readline可不认识csv的规则。csv文件可以识别双引号包起来的换行符是单元格内部的换行,python的readline识别不…...

使用Python简单实现客户端界面
服务端实现 import threading import timeimport wx from socket import socket, AF_INET, SOCK_STREAMclass LServer(wx.Frame):def __init__(self):wx.Frame.__init__(self, None, id1002, titleL服务器端界面, poswx.DefaultPosition, size(400, 450))# 窗口中添加面板pl …...

15分钟学 Go 第 43 天:前端与Go的结合
第43天:前端与Go的结合 目标:了解Go如何与前端交互,前端使用Vue.js 在现代Web开发中,Go语言常用于后端开发,而Vue.js是一个流行的前端框架,用于构建用户界面。结合二者,可以构建高效、可维护的…...

解决SRS推送webrtc流卡顿问题
目录 1.问题描述2.原因分析3.ffmpeg去掉B帧的方法3.1 命令行推流3.2 ffmpeg源码推流 1.问题描述 使用ffmpeg通过rtmp协议推流给SRS,然后浏览器通过webrtc拉取播放流,经多次测试发现webrtc播放流总是卡顿,而拉取rtmp流是正常的。 2.原因分析…...

GDPU Andriod移动应用 Broadcast Receiver
聆听广播,跟着节拍吧。 计时器 新建一个名为PhoneStateMonitor的工程; 实现一个应用运行时长的计时器,并在界面上刷新计数器,要求包括: (1)在Layout中包含两个TextView控件,横向分…...

CSP/信奥赛C++刷题训练:经典例题 - 栈(1):洛谷P3056 :[USACO12NOV] Clumsy Cows S
CSP/信奥赛C刷题训练:经典例题 - 栈(1):洛谷P3056 :[USACO12NOV] Clumsy Cows S 题目描述 Bessie the cow is trying to type a balanced string of parentheses into her new laptop, but she is sufficiently clums…...

WiFi一直获取不到IP地址是怎么回事?
在当今这个信息化时代,WiFi已成为我们日常生活中不可或缺的一部分。无论是家庭、办公室还是公共场所,WiFi都为我们提供了便捷的无线互联网接入。然而,有时我们可能会遇到WiFi连接后无法获取IP地址的问题,这不仅影响了我们的网络使…...

蓝牙BLE开发——iOS 每次写入数据超过200字节报错?
iOS 写入数据超过200字节报错 文章目录 iOS 写入数据超过200字节报错官方建议:报错问题解决 writeblecharacteristicvalue 官方建议: 并行调用多次会存在写失败的可能性。APP不会对写入数据包大小做限制,但系统与蓝牙设备会限制蓝牙4.0单次…...

Ascend Extension for PyTorch是个what?
1 Ascend Extension for PyTorch Ascend Extension for PyTorch 插件是基于昇腾的深度学习适配框架,使昇腾NPU可以支持PyTorch框架,为PyTorch框架的使用者提供昇腾AI处理器的超强算力。 项目源码地址请参见Ascend/Pytorch。 昇腾为基于昇腾处理器和软…...

学习docker第五弹-----高级篇start-Dockerfile
docker目录 1 Dockerfile是什么2 Dockerfile能干嘛3 如何书写Dockerfile3.1 Dockerfile构建过程解析3.2 小总结3.3 Dockerfile的基本知识3.5 保留字FROMMAINTAINERRUN 有两种方式EXPOSEWORKDIRENVUSERVOLUMEADDCMDENTRYPOINT 4 后记 1 Dockerfile是什么 Dockerfile顾名思义就是…...

【Elasticsearch】Elasticsearch集成Spring Boot
Elasticsearch集成Spring Boot 概述 Spring Data Elasticsearch 介绍一、环境初始化二、实战入门1、定义数据实体类2、定义Dao层3、框架集成-SpringData-集成测试-索引操作4、框架集成-SpringData-集成测试-文档操作5、框架集成-SpringData-集成测试-文档搜索 概述 Spring Data…...

HarmonyOS 移
什么是HarmonyOS HarmonyOS 中文名字是 鸿蒙操作系统 中国神话传说盘古在昆仑山开天辟地之前,世界是一团混沌状的元气,这种自然的元气叫做鸿蒙,那个时代成为鸿蒙时代华为公司的操作系统以鸿蒙取名,是不是有开天辟地之寓意&#x…...
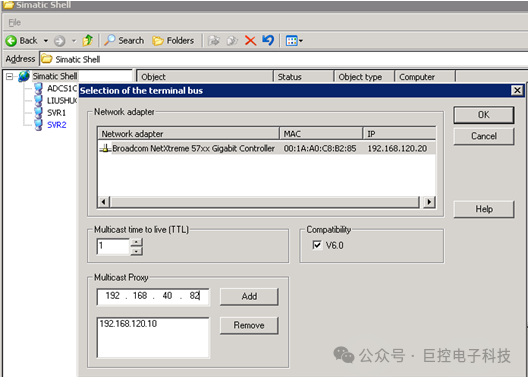
跨子网的WinCC客户机/服务器如何实现通讯?
为了更有效地利用有限的IP地址,为了减少广播对网络带宽的占用从而提高带宽,为了实现在不同子网中应用不同的安全策略从而提高网络安全性,现场通常要求划分子网,将安全等级要求不同的计算机安置在不同的子网中,分开管理…...

java 面向对象高级
1.final关键字 class Demo{public static void main(String[] args) {final int[] anew int[]{1,2,3};// anew int[]{4,5,6}; 报错a[0]5;//可以,解释了final修饰引用性变量,变量存储的地址不能被改变,但地址所指向的对象的内容可以改变} }什…...

递推经典例题 - 爬楼梯
一、题目阅读 题目描述 一段楼梯有n级台阶。你每次可以跨一个、两个或者三个台阶。 请问走上n级台阶有几种方案?答案对998244353取模。 输入格式 一行一个数n。 输出格式 一行一个数,表示方案数。 样例 Input 1 3 Output 1 4 样例解释 1 1 1 3 1 2 …...

OpenCV视觉分析之目标跟踪(12)找到局部的最大值函数meanShift()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 在反向投影图像上找到一个对象。 meanShift 是一种用于图像处理和计算机视觉领域的算法,特别适用于目标跟踪、图像分割等任务。该算…...
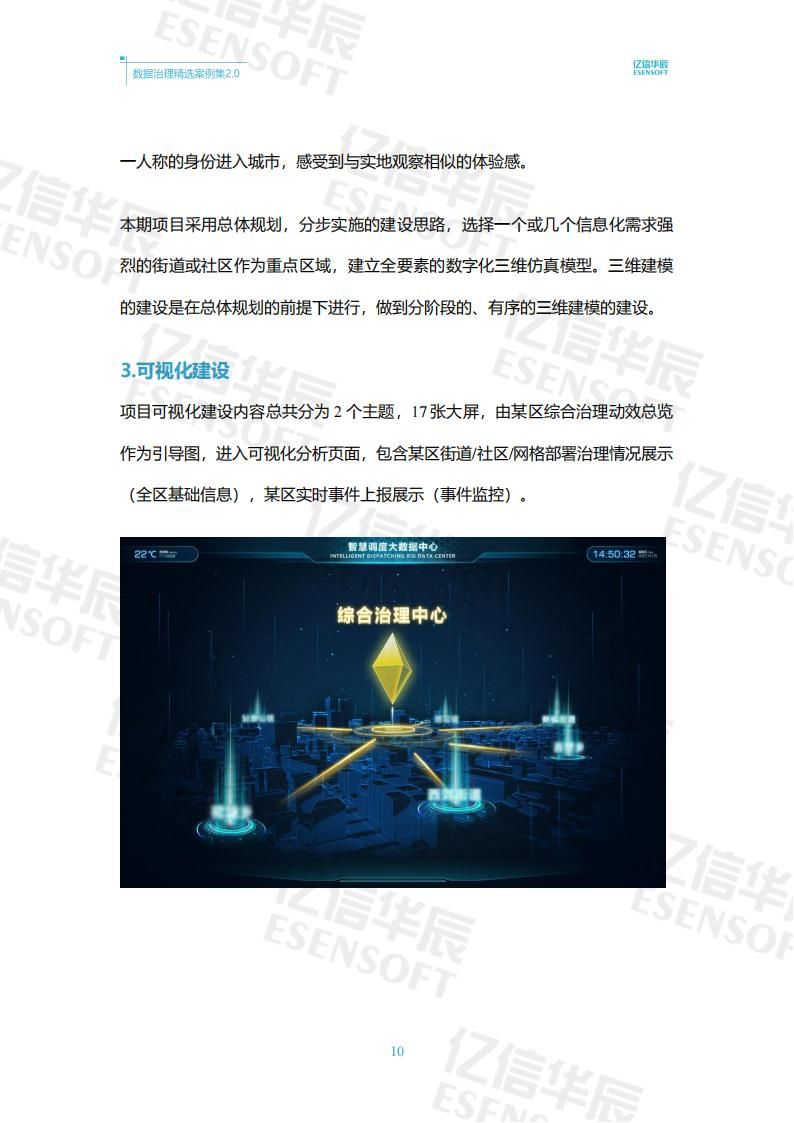
《数据治理精选案例集2.0(2024版)》592页PDF(已授权分享)
《亿信华辰数据治理精选案例集2.0》是北京亿信华辰软件有限责任公司倾力打造的专业数据治理案例集,汇集了100个一线政企数据治理实践案例,覆盖13大行业和500业务场景,通过深入剖析数据治理难题,提供了新思路和实战经验,…...

【51单片机】LED点阵屏 原理 + 使用
学习使用的开发板:STC89C52RC/LE52RC 编程软件:Keil5 烧录软件:stc-isp 开发板实图: 文章目录 LED点阵屏显示原理74HC595 编码LED点阵屏显示笑脸LED点阵屏显示动画 LED点阵屏 点阵屏在开发板的右上角,注意使用前需要…...
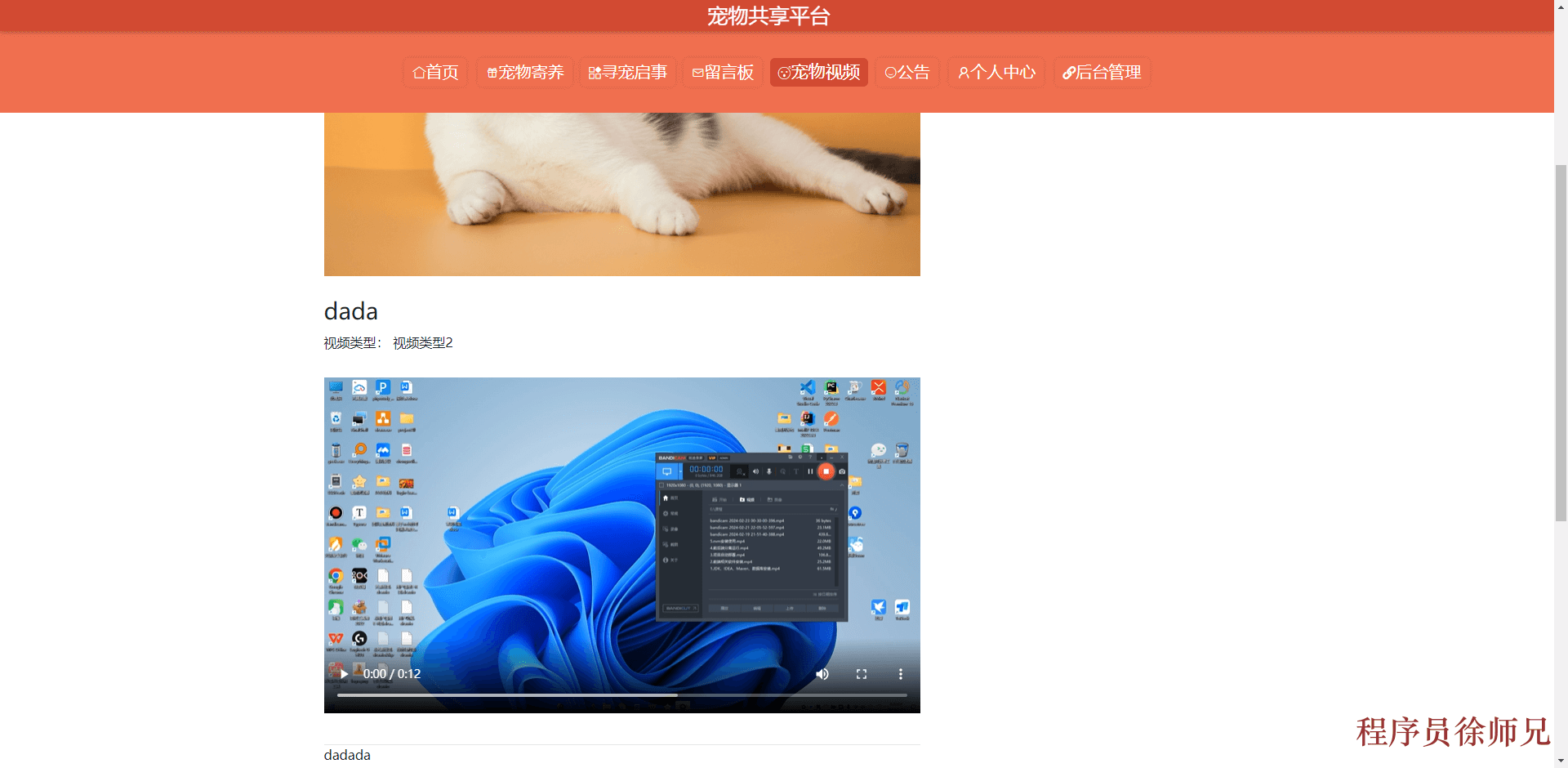
Java基于SpringBoot+Vue的宠物共享平台的设计与实现(附源码,文档)
博主介绍:✌程序员徐师兄、7年大厂程序员经历。全网粉丝12w、csdn博客专家、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取源码联系🍅 👇🏻 精彩专栏推荐订阅👇…...
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility 1. 实验室环境1.1 实验室环境1.2 小测试 2. The Endor System2.1 部署应用2.2 检查现有策略 3. Cilium 策略实体3.1 创建 allow-all 网络策略3.2 在 Hubble CLI 中验证网络策略源3.3 …...

django filter 统计数量 按属性去重
在Django中,如果你想要根据某个属性对查询集进行去重并统计数量,你可以使用values()方法配合annotate()方法来实现。这里有两种常见的方法来完成这个需求: 方法1:使用annotate()和Count 假设你有一个模型Item,并且你想…...
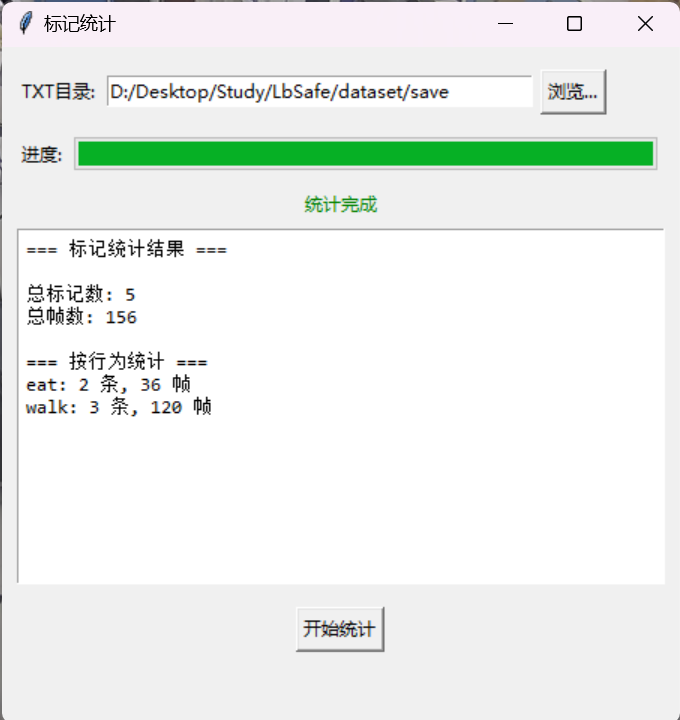
视频行为标注工具BehaviLabel(源码+使用介绍+Windows.Exe版本)
前言: 最近在做行为检测相关的模型,用的是时空图卷积网络(STGCN),但原有kinetic-400数据集数据质量较低,需要进行细粒度的标注,同时粗略搜了下已有开源工具基本都集中于图像分割这块,…...
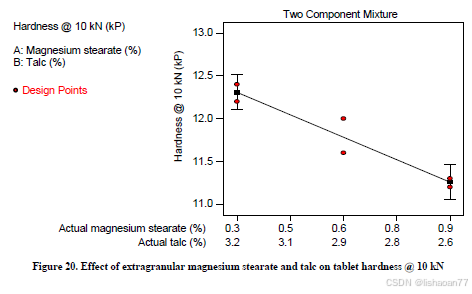
R语言速释制剂QBD解决方案之三
本文是《Quality by Design for ANDAs: An Example for Immediate-Release Dosage Forms》第一个处方的R语言解决方案。 第一个处方研究评估原料药粒径分布、MCC/Lactose比例、崩解剂用量对制剂CQAs的影响。 第二处方研究用于理解颗粒外加硬脂酸镁和滑石粉对片剂质量和可生产…...

Go语言多线程问题
打印零与奇偶数(leetcode 1116) 方法1:使用互斥锁和条件变量 package mainimport ("fmt""sync" )type ZeroEvenOdd struct {n intzeroMutex sync.MutexevenMutex sync.MutexoddMutex sync.Mutexcurrent int…...
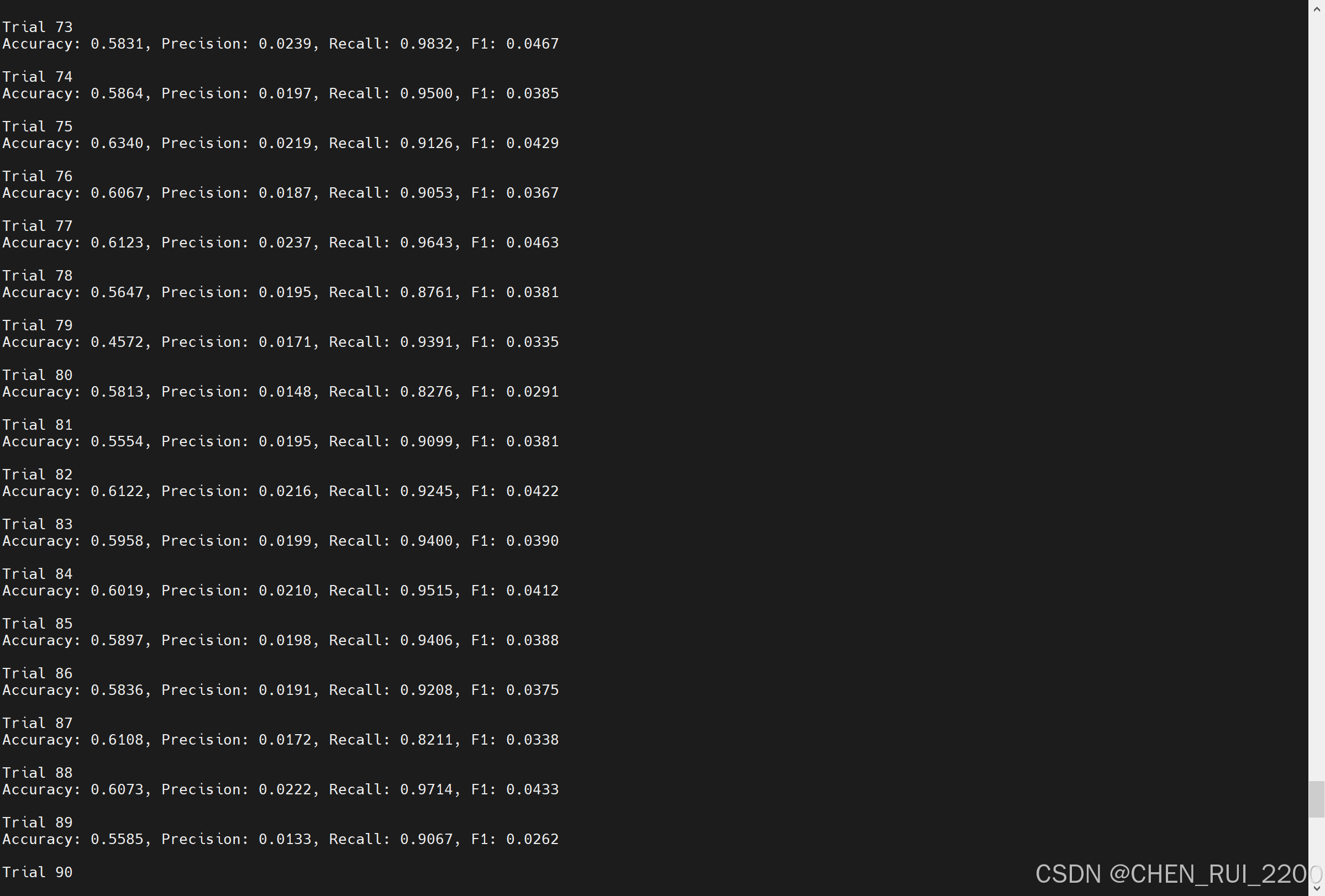
逻辑回归暴力训练预测金融欺诈
简述 「使用逻辑回归暴力预测金融欺诈,并不断增加特征维度持续测试」的做法,体现了一种逐步建模与迭代验证的实验思路,在金融欺诈检测中非常有价值,本文作为一篇回顾性记录了早年间公司给某行做反欺诈预测用到的技术和思路。百度…...

Vite中定义@软链接
在webpack中可以直接通过符号表示src路径,但是vite中默认不可以。 如何实现: vite中提供了resolve.alias:通过别名在指向一个具体的路径 在vite.config.js中 import { join } from pathexport default defineConfig({plugins: [vue()],//…...

实战三:开发网页端界面完成黑白视频转为彩色视频
一、需求描述 设计一个简单的视频上色应用,用户可以通过网页界面上传黑白视频,系统会自动将其转换为彩色视频。整个过程对用户来说非常简单直观,不需要了解技术细节。 效果图 二、实现思路 总体思路: 用户通过Gradio界面上…...
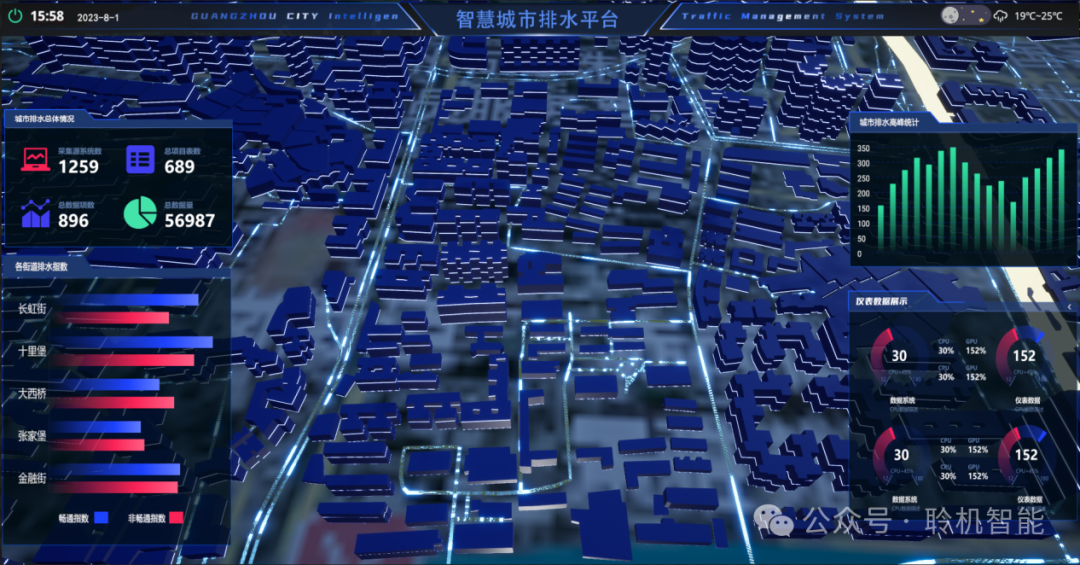
从零开始了解数据采集(二十八)——制造业数字孪生
近年来,我国的工业领域正经历一场前所未有的数字化变革,从“双碳目标”到工业互联网平台的推广,国家政策和市场需求共同推动了制造业的升级。在这场变革中,数字孪生技术成为备受关注的关键工具,它不仅让企业“看见”设…...
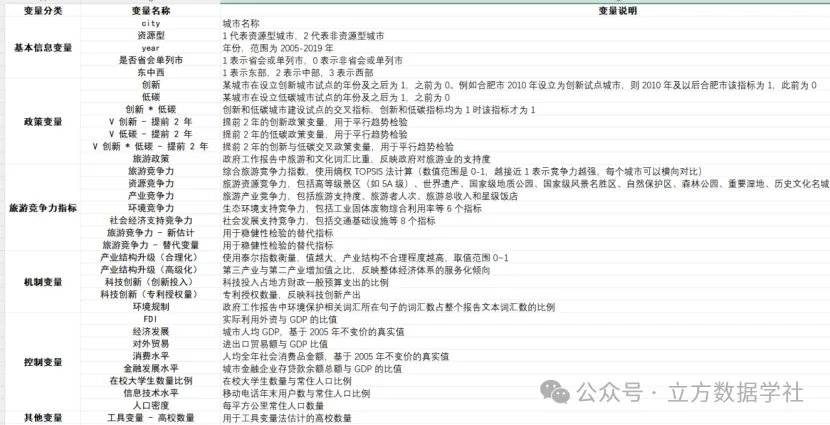
【免费数据】2005-2019年我国272个地级市的旅游竞争力多指标数据(33个指标)
旅游业是一个城市的重要产业构成。旅游竞争力是一个城市竞争力的重要构成部分。一个城市的旅游竞争力反映了其在旅游市场竞争中的比较优势。 今日我们分享的是2005-2019年我国272个地级市的旅游竞争力多指标数据!该数据集源自2025年4月发表于《地理学报》的论文成果…...