ROS2简介与Ubuntu24.04中安装指南
- 之前安装了一个版本,但是不愿意写blog,现在想想自己就是个沙子
- 立个flag,每次配置项目,写流程blog
ROS简介
ROS(Robot Operating System)是一个开源的机器人软件平台,提供了许多工具和库来帮助开发机器人应用。ROS的不同版本有不同的命名和发布策略,其中“Jazzy”和“Rolling”是两个不同的版本。
-
ROS Jazzy:
- ROS Jazzy是ROS 2的一个特定版本,通常是指ROS 2的某个稳定版本(如ROS 2 Foxy的后续版本)。它是一个长期支持(LTS)版本,意味着它会在较长时间内获得支持和更新。
- Jazzy版本通常会包含经过充分测试的功能和API,适合需要稳定性的生产环境。
-
ROS Rolling:
- ROS Rolling是一个滚动发布版本,意味着它是一个持续更新的版本,包含最新的功能和改进。与Jazzy不同,Rolling版本不保证稳定性,因为它会不断接收新的代码和功能。
- 适合开发者和研究人员,他们希望使用最新的功能和技术,但需要注意可能会遇到不稳定或不兼容的问题。
总结来说,ROS Jazzy适合需要稳定和长期支持的应用,而ROS Rolling则适合希望使用最新功能的开发者。选择哪个版本取决于你的项目需求和对稳定性的要求。
github和gitlab的区别
GitHub和GitLab都是流行的版本控制和协作平台,主要用于代码托管和项目管理。尽管它们有许多相似之处,但也存在一些关键区别:
-
托管方式:
- GitHub:主要是一个基于云的服务,用户可以在GitHub的服务器上托管代码。GitHub也提供了GitHub Enterprise版本,允许企业在自己的服务器上托管代码。
- GitLab:同样提供基于云的服务,但也允许用户在自己的服务器上自托管GitLab实例。GitLab的自托管版本功能丰富,适合需要完全控制代码和数据的企业。
-
功能:
- GitHub:以其强大的社区和开源项目而闻名,提供了Pull Request(拉取请求)功能,便于代码审查和合并。GitHub还提供GitHub Actions用于CI/CD(持续集成/持续交付)。
- GitLab:提供更全面的DevOps工具链,包括内置的CI/CD功能、问题跟踪、代码审查、容器注册表等。GitLab的集成功能使得从代码开发到部署的整个流程更加顺畅。
-
用户界面:
- GitHub:界面简洁,易于使用,特别适合开源项目和社区协作。
- GitLab:界面相对复杂,功能更多,适合需要全面项目管理和DevOps功能的团队。
-
社区和开源:
- GitHub:虽然GitHub本身是一个私有平台,但它托管了大量的开源项目,社区活跃。
- GitLab:GitLab本身是开源的,用户可以访问其源代码并根据需要进行修改。GitLab的开源版本提供了许多功能,适合开发者和团队使用。
-
定价:
- GitHub:提供免费和付费计划,免费计划有一些限制,适合个人和小型项目。
- GitLab:同样提供免费和付费计划,免费计划功能相对丰富,适合团队使用。
总的来说,选择GitHub还是GitLab取决于团队的需求、项目的性质以及对功能和控制的要求。
参考文档(安装ROS2)
主要:https://docs.ros.org/en/rolling/Installation/Alternatives/Ubuntu-Install-Binary.html
- ros2官方文档,采用binary安装,因为之前从源码安装貌似和ubuntu24.04的库函数版本冲突,
- 更新,该方法因为
rosdep update更新无效而失败, - 软件包安装有3种方式:deb、binary、source,可以直接从.deb安装
真正的主要文档:https://docs.ros.org/en/rolling/Installation/Ubuntu-Install-Debs.html
ustc软件源:https://mirrors.ustc.edu.cn/help/ros2.html
- 不知道如何apt安装,是不是更新软件源之后可以直接apt install ros-versionx?
aliyun软件源:https://developer.aliyun.com/mirror/ros2?spm=a2c6h.13651102.0.0.29161b11f0jrwL
版本过低(<=20.04)
Path2(成功)-deb
按照.deb文档安装,
流程概述:添加软件源之后
sudo apt install ros-rolling-desktop
测试,完结撒花💐
source /opt/ros/rolling/setup.sh
ros2 run demo_nodes_cpp talker

激活命令
source /opt/ros/rolling/setup.sh
source /opt/ros/rolling/setup.sh 是在ROS系统中用来设置环境变量的脚本。该脚本会将ROS的主要路径和其他必要路径添加到系统的环境变量中,以便正确地运行ROS命令和程序。
具体来说,该脚本会将以下路径添加到环境变量中:
/opt/ros/rolling/: ROS安装目录,包括核心包和工具。/opt/ros/rolling/setup.bash: ROS的设置脚本。/opt/ros/rolling/share: ROS包的共享目录。/opt/ros/rolling/bin: ROS命令和工具的可执行文件目录。
通过运行这个脚本,可以为当前终端会话设置正确的ROS环境,以便使用ROS系统。
Question
- ubuntu如何apt搜索软件包的某个版本?
- 按关键字查询
sudo apt search ros-rolling

2. 如何修改apt search,只返回软件名中出现关键字的条目,不返回描述中出现关键字的条目
- 采用正则表达式+grep
sudo apt search ros | grep "^ros"
- 实用技巧——ubuntu执行前一条指令
sudo !!
Path1-binary
- 直接执行
rosdep update
报错如下:
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
ERROR: error loading sources list:The read operation timed out
开启global魔法,赋能终端,retry,make it~
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
Skip end-of-life distro "ardent"
Skip end-of-life distro "bouncy"
Skip end-of-life distro "crystal"
Skip end-of-life distro "dashing"
Skip end-of-life distro "eloquent"
Skip end-of-life distro "foxy"
Skip end-of-life distro "galactic"
Skip end-of-life distro "groovy"
Add distro "humble"
Skip end-of-life distro "hydro"
Skip end-of-life distro "indigo"
Add distro "iron"
Skip end-of-life distro "jade"
Add distro "jazzy"
Skip end-of-life distro "kinetic"
Skip end-of-life distro "lunar"
Skip end-of-life distro "melodic"
Add distro "noetic"
ERROR: error loading sources list:The read operation timed out (https://raw.githubusercontent.com/ros/rosdistro/master/noetic/distribution.yaml)
相关文章:
ROS2简介与Ubuntu24.04中安装指南
之前安装了一个版本,但是不愿意写blog,现在想想自己就是个沙子立个flag,每次配置项目,写流程blog ROS简介 ROS(Robot Operating System)是一个开源的机器人软件平台,提供了许多工具和库来帮助…...
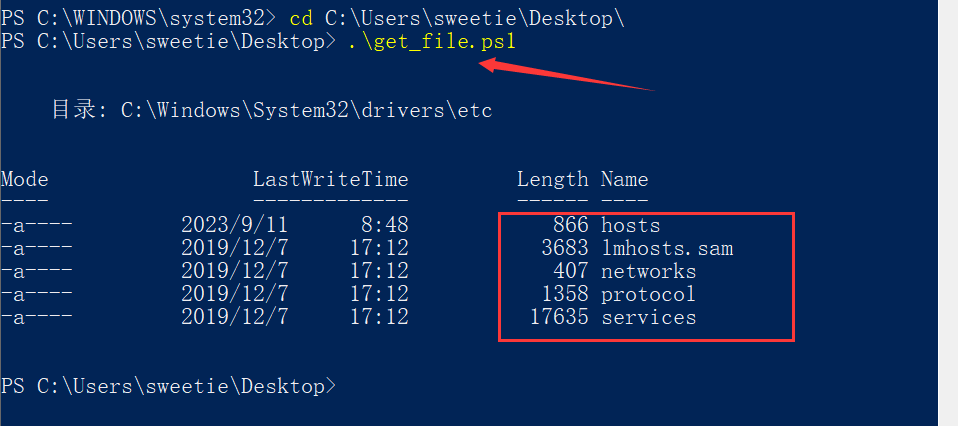
命令行工具PowerShell使用体验
命令行工具PowerShell使用 PowerShell是微软开发的一种面向对象的命令行Shell和脚本语言环境,它允许用户通过命令行的方式管理操作系统。相较于传统CMD,PowerShell增加了面向对象的程序设计框架,拥有更强大的功能和扩展性。使用PowerShell可…...

MongoDB 详解:深入理解与探索
在当今的数据库领域,MongoDB 以其独特的特性和强大的功能,成为了众多开发者和企业的首选。本文将对 MongoDB 进行详细的介绍,包括其特点、应用场景、流程图以及源码分析。 一、MongoDB 概述 MongoDB 是一个基于分布式文件存储的开源数据库系…...

使用 Elasticsearch 构建食谱搜索(一)
作者:来自 Elastic Andre Luiz 了解如何使用 Elasticsearch 构建基于语义搜索的食谱搜索。 简介 许多电子商务网站都希望增强其食谱搜索体验。正确使用语义搜索可以让客户根据更自然的查询(例如 “something for Valentines Day - 情人节的礼物” 或 “…...

sealos部署K8s,安装docker时master节点突然NotReady
1、集群正常运行中,在集群master-1上安装了dockerharbor,却发现master-1节点NotReady,使用的网络插件为 Cilium #安装docker和harbor(docker运行正常) rootmaster-1:/etc/apt# apt install docker-ce5:19.03.15~3-0~u…...

使用vite+react+ts+Ant Design开发后台管理项目(五)
前言 本文将引导开发者从零基础开始,运用vite、react、react-router、react-redux、Ant Design、less、tailwindcss、axios等前沿技术栈,构建一个高效、响应式的后台管理系统。通过详细的步骤和实践指导,文章旨在为开发者揭示如何利用这些技术…...

Spring Boot实现多数据源连接和切换
文章目录 前言一、多数据源配置与切换方案二、实现步骤1. 创建多个 DataSource 配置类2. 创建 DataSource 配置类3. 创建动态数据源路由类4. 实现 DynamicDataSource 类5. 创建 DataSourceContextHolder 来存储当前的数据源标识6. AOP 方式切换数据源7. 自定义注解来指定数据源…...
发布 VectorTraits v3.0(支持 X86架构的Avx512系列指令集,支持 Wasm架构及PackedSimd指令集等)
文章目录 支持 X86架构的Avx512系列指令集支持Avx512时的输出信息 支持 Wasm架构及PackedSimd指令集支持PackedSimd时的输出信息VectorTraits.Benchmarks.Wasm 使用说明 新增了向量方法支持 .NET 8.0 新增的向量方法提供交织与解交织的向量方法YGroup3Unzip的范例代码 提供重新…...
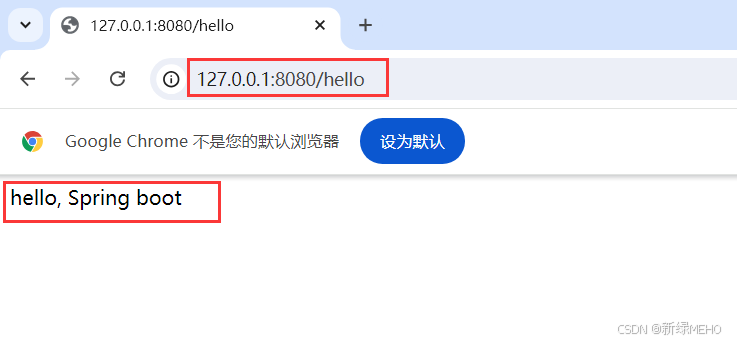
详解如何创建SpringBoot项目
目录 点击New Project 选择依赖 简单使用SpringBoot 前面已经讲解了如何获取IDEA专业版,下面将以此为基础来讲解如何创建SpringBoot项目。 点击New Project 选择依赖 注意,在选择SpringBoot版本时,不要选择带SNAPSHOT的版本。 这样&#…...

IT架构管理
目录 总则 IT架构管理目的 明确组织与职责 IT架构管理旨在桥接技术实施与业务需求之间的鸿沟,通过深入理解业务战略和技术能力,推动技术创新以支持业务增长,实现技术投资的最大价值。 设定目标与范围 IT架构管理的首要目的是确立清晰的组织…...

Feign入门实践
引言 随着微服务架构的兴起,服务间的通信变得越来越频繁和复杂。为了简化服务之间的调用过程,提高开发效率和系统的可维护性,Spring Cloud 生态系统提供了多种解决方案,其中 OpenFeign 是一种声明式的 HTTP 客户端,它使…...

Leetcode 买卖股票的最佳时机 Ⅱ
使用贪心算法来解决此问题,通过在价格上涨的每一天买入并在第二天卖出的方式,累计所有上涨的利润,以实现最大收益。关键点是从第二天开始遍历,并且只要当前比前一天价格高,我们就在前一天买入然后第二天卖出去。下面是…...

书生大模型实战营-玩转HF/魔搭社区闯关任务
通过Github Codespace下载InternLM模型并运行 本篇博客是记录《书生大模型实战营第四期-玩转HF/魔搭/魔乐》章节的闯关任务从HF上下载模型文件,对实战营感兴趣的小伙伴也可以扫码报名哦。 一、通过模版创建Codespace环境 访问codespace 点击Jupyter Notebook 模版…...
:原理、应用与发展趋势的深度解析)
混响(Reverb):原理、应用与发展趋势的深度解析
目录 引言1. 混响的基本原理2. 混响的应用3. 混响的技术实现4. 混响的未来发展趋势5. 总结 引言 混响(Reverb)是音频信号处理中的重要概念之一,在自然界和音频工程中都扮演着关键角色。从音乐制作到语音识别,从电影音效到虚拟现实…...
)
Java学习教程,从入门到精通,Java修饰符语法知识点及案例代码(23)
1.Java修饰符语法知识点及案例代码 Java修饰符用于改变类、方法、变量、接口等元素的行为和可见性。主要分为两大类:访问修饰符和非访问修饰符。 访问修饰符(Access Modifiers) public 提供最大的访问权限,任何类都可以访问。使…...

钉钉小程序使用getApp实现类型provide inject的功能 应用场景:解决页面同步子组件弹窗的滚动问题
前言:在开发钉钉小程序的时候 组件内部的弹窗滚动会带着视图同步滚动 所以需要在组件内部弹窗显示的时候禁用视图的scroll滚动 由于我组件封装的比较深 不可能逐级传递 dd也么有provide的语法 所以我使用的getApp 完成控制的效果 最终完美运行 觉得有帮助相互关注一下 后续会持…...

标准化 Git 提交信息的约定
在使用 Git 进行版本控制时,良好的提交信息可以帮助团队成员更好地理解每次提交的目的和影响。为了规范化提交信息,一些团队采用了特定的格式或约定,比如 Angular 团队提出的 Commit Message Conventions。这种规范有助于自动化工具的使用&am…...
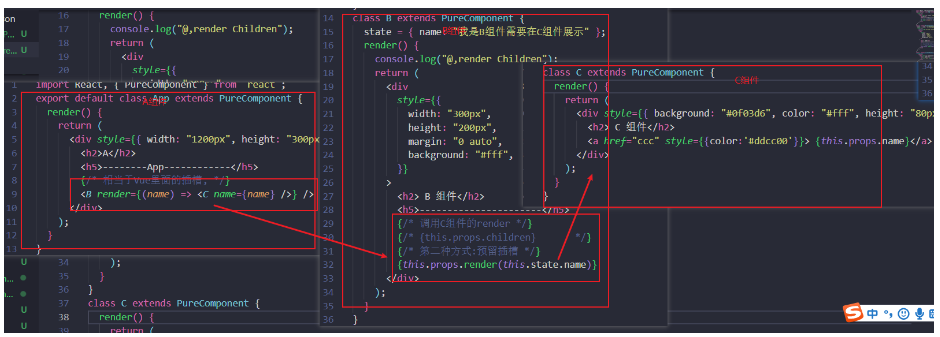
React教程(详细版)
React教程(详细版) 1,简介 1.1 概念 react是一个渲染html界面的一个js库,类似于vue,但是更加灵活,写法也比较像原生js,之前我们写出一个完成的是分为html,js,css&…...
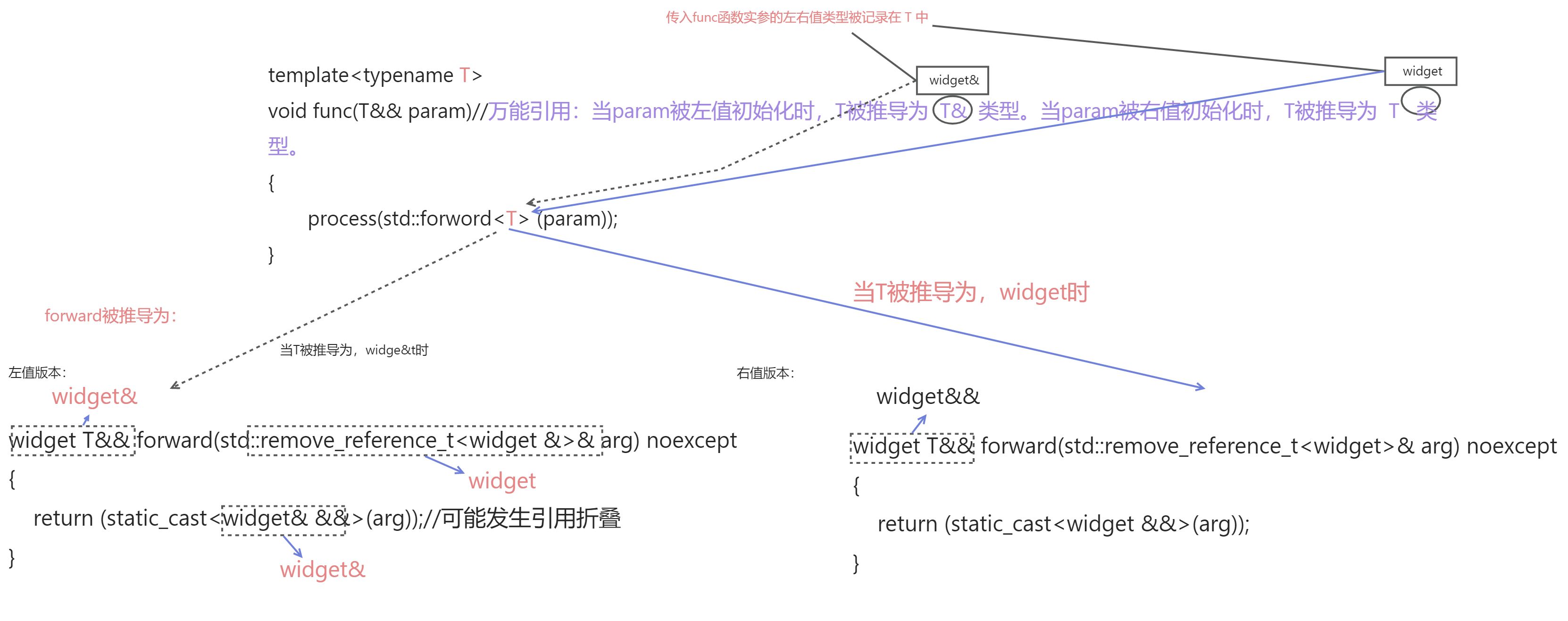
Perfect Forwarding(完美转发)
文章目录 1. 引用折叠2. 万能引用3. 完美转发3.1对比:std::move and std::forward比较 3.2使用时机3.3 返回值优化(RVO)两个前提条件注意事项 4. 完美转发失败情况完美转发失败五种情况 完美转发的实现要依赖于模版类型推导和引用折叠和万能引用。 1. 引…...

PHP露营地管理平台小程序系统源码
⛺️【露营新风尚】露营地管理平台系统全攻略⛺️ 🏕️一、露营热潮下的管理难题:如何高效运营露营地?🤔 随着露营文化的兴起,越来越多的人选择在大自然中享受宁静与自由。然而,露营地的管理却面临着诸多…...
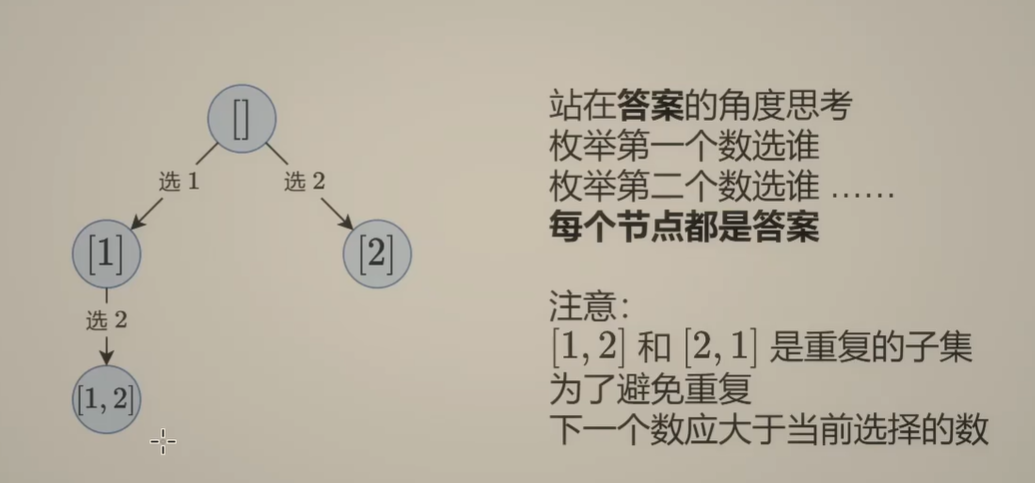
Day131 | 灵神 | 回溯算法 | 子集型 子集
Day131 | 灵神 | 回溯算法 | 子集型 子集 78.子集 78. 子集 - 力扣(LeetCode) 思路: 笔者写过很多次这道题了,不想写题解了,大家看灵神讲解吧 回溯算法套路①子集型回溯【基础算法精讲 14】_哔哩哔哩_bilibili 完…...
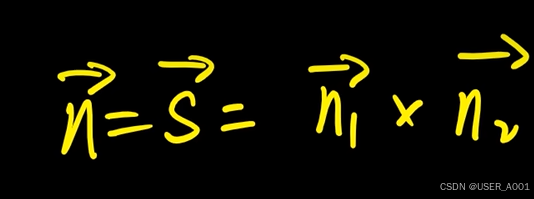
高等数学(下)题型笔记(八)空间解析几何与向量代数
目录 0 前言 1 向量的点乘 1.1 基本公式 1.2 例题 2 向量的叉乘 2.1 基础知识 2.2 例题 3 空间平面方程 3.1 基础知识 3.2 例题 4 空间直线方程 4.1 基础知识 4.2 例题 5 旋转曲面及其方程 5.1 基础知识 5.2 例题 6 空间曲面的法线与切平面 6.1 基础知识 6.2…...

PL0语法,分析器实现!
简介 PL/0 是一种简单的编程语言,通常用于教学编译原理。它的语法结构清晰,功能包括常量定义、变量声明、过程(子程序)定义以及基本的控制结构(如条件语句和循环语句)。 PL/0 语法规范 PL/0 是一种教学用的小型编程语言,由 Niklaus Wirth 设计,用于展示编译原理的核…...

汇编常见指令
汇编常见指令 一、数据传送指令 指令功能示例说明MOV数据传送MOV EAX, 10将立即数 10 送入 EAXMOV [EBX], EAX将 EAX 值存入 EBX 指向的内存LEA加载有效地址LEA EAX, [EBX4]将 EBX4 的地址存入 EAX(不访问内存)XCHG交换数据XCHG EAX, EBX交换 EAX 和 EB…...
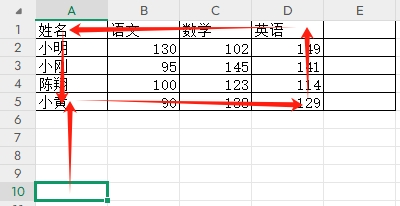
3-11单元格区域边界定位(End属性)学习笔记
返回一个Range 对象,只读。该对象代表包含源区域的区域上端下端左端右端的最后一个单元格。等同于按键 End 向上键(End(xlUp))、End向下键(End(xlDown))、End向左键(End(xlToLeft)End向右键(End(xlToRight)) 注意:它移动的位置必须是相连的有内容的单元格…...
零基础在实践中学习网络安全-皮卡丘靶场(第九期-Unsafe Fileupload模块)(yakit方式)
本期内容并不是很难,相信大家会学的很愉快,当然对于有后端基础的朋友来说,本期内容更加容易了解,当然没有基础的也别担心,本期内容会详细解释有关内容 本期用到的软件:yakit(因为经过之前好多期…...

CSS设置元素的宽度根据其内容自动调整
width: fit-content 是 CSS 中的一个属性值,用于设置元素的宽度根据其内容自动调整,确保宽度刚好容纳内容而不会超出。 效果对比 默认情况(width: auto): 块级元素(如 <div>)会占满父容器…...
C++:多态机制详解
目录 一. 多态的概念 1.静态多态(编译时多态) 二.动态多态的定义及实现 1.多态的构成条件 2.虚函数 3.虚函数的重写/覆盖 4.虚函数重写的一些其他问题 1).协变 2).析构函数的重写 5.override 和 final关键字 1&#…...
push [特殊字符] present
push 🆚 present 前言present和dismiss特点代码演示 push和pop特点代码演示 前言 在 iOS 开发中,push 和 present 是两种不同的视图控制器切换方式,它们有着显著的区别。 present和dismiss 特点 在当前控制器上方新建视图层级需要手动调用…...
)
C++课设:简易日历程序(支持传统节假日 + 二十四节气 + 个人纪念日管理)
名人说:路漫漫其修远兮,吾将上下而求索。—— 屈原《离骚》 创作者:Code_流苏(CSDN)(一个喜欢古诗词和编程的Coder😊) 专栏介绍:《编程项目实战》 目录 一、为什么要开发一个日历程序?1. 深入理解时间算法2. 练习面向对象设计3. 学习数据结构应用二、核心算法深度解析…...