Ubuntu 的 ROS 2 操作系统安装与测试
引言
-
机器人操作系统(ROS, Robot Operating System)是一种广泛应用于机器人开发的开源框架,提供了丰富的库和工具,支持开发者快速构建、控制机器人并实现智能功能。
-
当前,ROS 2 的最新长期支持版本为 Humble Hawksbill,专为 Ubuntu 22.04(Jammy Jellyfish)设计,适用于 Linux 环境下的机器人控制、感知、路径规划等功能开发。
-
本文将介绍 ROS 2 Humble 的安装流程及基本测试方法,帮助读者快速掌握这一强大的机器人操作系统的基础使用。

学习目标
-
本次学习的目标是通过在 Ubuntu 系统上安装和配置 ROS 2 Humble Hawksbill,为后续的机器人开发和应用奠定基础。
-
通过本次学习,读者将掌握 ROS 2 Humble 的安装步骤、环境配置及基本操作,能够在 Ubuntu 系统上顺利使用 ROS 2 进行机器人控制、感知和算法开发。
-
同时,将学习如何创建和管理 ROS 2 工作空间、安装必要的依赖包、配置环境变量等,以确保系统支持多种机器人开发任务,为后续算法实现和仿真工作提供可靠基础。
-
安装与自己Ubuntu版本对应的ROS版本,本文ROS 2 Humble Hawksbill 主要支持 Ubuntu 22.04 (Jammy Jellyfish)。安装前请详细参考 Ubuntu版本、ROS版本与Python 版本之间的关系,

学习内容
1 设置系统语言环境
ROS 2 Humble Hawksbill是ROS 2的稳定版本之一,支持Ubuntu Jammy (22.04)。安装此版本在最新的平台上使用ROS 2进行机器人开发。
确保系统支持UTF-8编码格式。对于Docker等最小化环境,执行以下命令:
locale # 查看当前编码
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # 验证设置2 设置软件源
在Ubuntu系统中添加ROS 2的APT软件源。
2.1 确保Ubuntu的universe仓库已启用
# 在Ubuntu系统中添加ROS 2的APT软件源
sudo apt install software-properties-common
# 确保Ubuntu的universe仓库已启用
sudo add-apt-repository universe2.2 添加ROS 2的GPG密钥
# 添加ROS 2的GPG密钥
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg2.3 添加ROS 2的APT源到系统源列表
# 添加ROS 2的APT源到系统源列表
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null3 安装ROS 2 Humble包
3.1 环境配置
更新APT缓存并确保系统已更新。
# 更新APT缓存并确保系统已更新
sudo apt update
# 更新系统以避免系统包冲突
sudo apt upgrade 3.2 根据需求选择安装的ROS 2版本
3.2.1 桌面版安装(推荐):包括ROS、RViz、示例和教程,适合开发和仿真。
# 安装推荐的桌面版(包括ROS、RViz、示例、教程)
sudo apt install ros-humble-desktop3.2.2 基础版安装(精简版):仅包含通信库、消息包和命令行工具,不包括GUI工具。
# 安装基础版(仅包含核心通信库和命令行工具)
sudo apt install ros-humble-ros-base3.2.3 开发工具安装:提供编译器和其他构建ROS包的工具。
# 开发工具(编译器等)
sudo apt install ros-dev-tools4 环境配置
4.1 环境配置
每次在终端中使用ROS 2时,都需要source环境配置文件:
# source环境配置文件
source /opt/ros/humble/setup.bash4.2 简化操作
为了简化操作,可以将其添加到.bashrc文件中,使其在每次新终端启动时自动source:
# 在.bashrc中加入ROS的环境变量设置,使其每次启动终端时自动加载
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc# 更新.bashrc文件使其生效
source ~/.bashrc5 验证安装
安装完成后,验证安装的ROS 2 Humble系统是否可以正常使用。
5.1 检查ROS 2版本
# 检查ROS 2版本
ros2 --version输出安装的ROS 2版本,本文安装为 humble,如果输出正确版本说明ROS 2已经成功安装。
5.2 检查ROS 2环境
# 检查ROS 2环境
echo $ROS_DOMAIN_ID- 若显示出设定的ROS_DOMAIN_ID,则表明环境配置正确。
- 如果没有输出,请重新执行source /opt/ros/humble/setup.bash,或将此命令添加至~/.bashrc文件中。
5.3 ROS 2核心
- 在ROS 2中,不再需要像ROS 1那样手动启动roscore。
- ROS 2的通信机制是基于DDS中间件,自动处理节点间的发现和通信。
5.4 运行ROS 2示例节点(验证ROS 2通信机制)
ROS 2提供了一些示例节点,可以用来验证安装:
# 发布消息
ros2 run demo_nodes_cpp talker然后在另一个终端运行:
# 接收消息
ros2 run demo_nodes_py listener若两个节点能够正常通信并在终端显示传输的消息,则说明ROS 2已经正确安装并配置完毕。
小结
- 通过本次安装与配置,在Ubuntu系统上成功部署了ROS 2 Humble环境,并验证了其核心功能的运行情况。
- 本文详细介绍了从设置系统语言、配置APT源,到安装ROS 2及其基本工具包的各个步骤,同时也展示了环境配置和通信测试的方法。完成这些步骤后,用户可以顺利使用ROS 2进行机器人应用的开发和实验,为后续的工作打下坚实基础。
- ROS 2 Humble版本在通信机制、性能和灵活性上相较于ROS 1有显著提升,更适合复杂的机器人系统开发。未来,可以进一步学习ROS 2的开发工具和实际项目应用,实现机器人功能的扩展与优化。
欢迎大家评论留言!!!
友情提示:
- 专栏:Turtlebot3 PC端ROS环境搭建与仿真
- 下一节:Ubuntu 的 ROS 操作系统turtlebot3环境搭建
相关文章:
Ubuntu 的 ROS 2 操作系统安装与测试
引言 机器人操作系统(ROS, Robot Operating System)是一种广泛应用于机器人开发的开源框架,提供了丰富的库和工具,支持开发者快速构建、控制机器人并实现智能功能。 当前,ROS 2 的最新长期支持版本为 Humble Hawksbil…...
在双显示器环境中利用Sunshine与Moonlight实现游戏串流的同时与电脑其他任务互不干扰
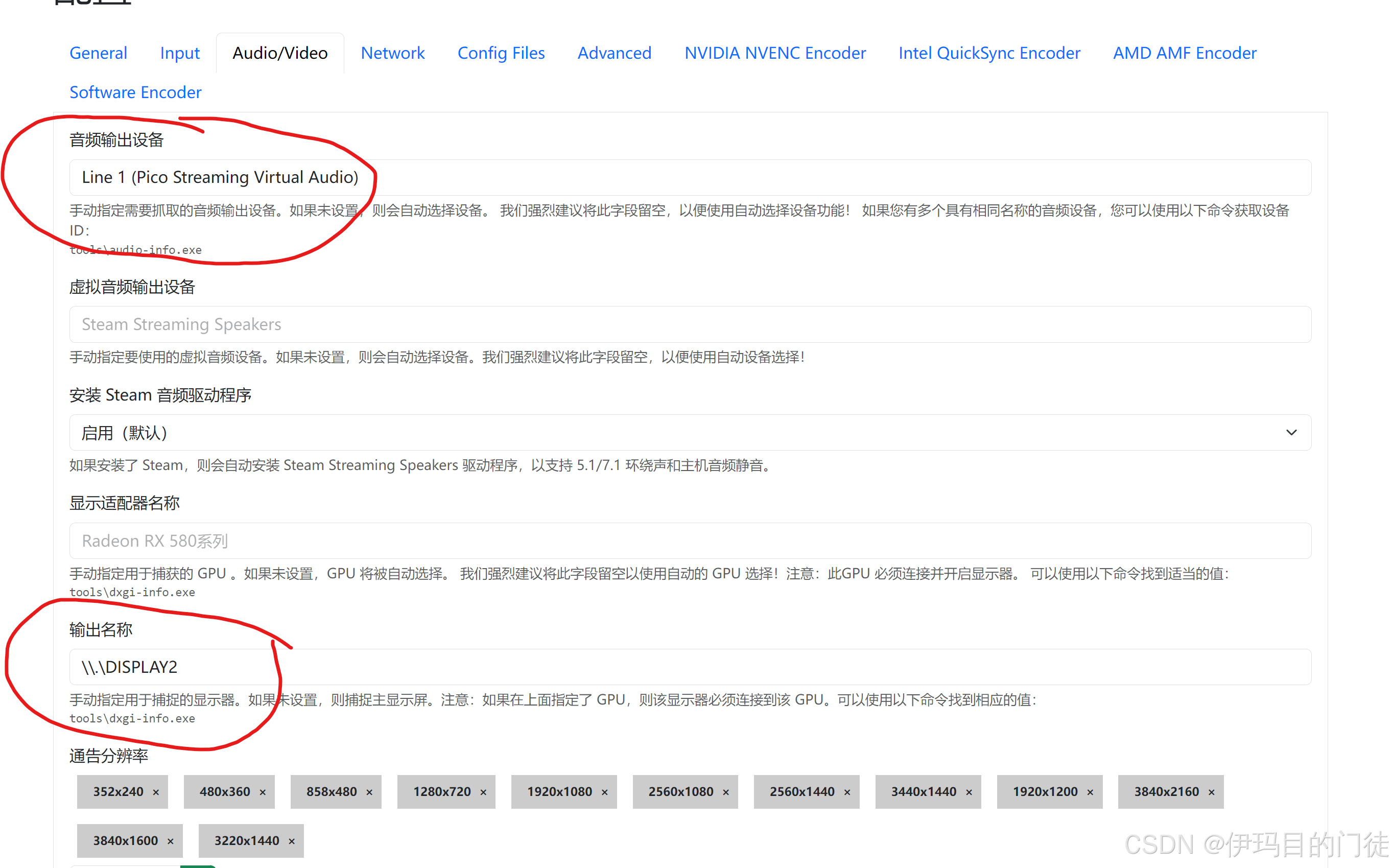
我和老婆经常会同时需要操作家里的电脑,在周末老婆有时要用电脑加班上网办公,而我想在难得的周末好好地Game一下(在客厅用电视机或者平板串流),但是电脑只有一个,以往我一直都是把电脑让给老婆,…...

ElasticSearch备考 -- Cross cluster replication(CCR)
一、题目 操作在cluster1(local)中操作索引task,复制到cluster2(remote)中 二、思考 CCR 我们可以对标MySQL 理解为为主从,后者备份。主节点负责写入数据,从/备节点负责同步时主节点的数据。 …...

windows C#-异常处理
C# 程序员使用 try 块来对可能受异常影响的代码进行分区。 关联的 catch 块用于处理生成的任何异常。 finally 块包含无论 try 块中是否引发异常都会运行的代码,如发布 try 块中分配的资源。 try 块需要一个或多个关联的 catch 块或一个 finally 块,或两…...

边缘计算在智能制造中的应用
💓 博客主页:瑕疵的CSDN主页 📝 Gitee主页:瑕疵的gitee主页 ⏩ 文章专栏:《热点资讯》 边缘计算在智能制造中的应用 边缘计算在智能制造中的应用 边缘计算在智能制造中的应用 引言 边缘计算概述 定义与原理 发展历程 …...

点云开发:从入门到精通的全面教程
简介 点云技术已成为计算机视觉、自动驾驶、3D重建等领域的重要组成部分。本教程旨在引导你从零基础开始学习点云开发,深入理解其背后的数学原理,并提供实用的开发技巧。 章节目录 点云技术概述 点云的定义及应用场景点云数据的来源和采集工具点云数据…...
【含文档】基于ssm+jsp的商店会员系统(含源码+数据库+lw)
1.开发环境 开发系统:Windows10/11 架构模式:MVC/前后端分离 JDK版本: Java JDK1.8 开发工具:IDEA 数据库版本: mysql5.7或8.0 数据库可视化工具: navicat 服务器: apache tomcat 主要技术: Java,Spring,SpringMvc,mybatis,mysql,vue 2.视频演示地址 3.功能 系统定义了两个…...

【大数据学习 | kafka高级部分】文件清除原理
2. 两种文件清除策略 kafka数据并不是为了做大量存储使用的,主要的功能是在流式计算中进行数据的流转,所以kafka中的数据并不做长期存储,默认存储时间为7天 那么问题来了,kafka中的数据是如何进行删除的呢? 在Kafka…...

dolphin 配置data 从文件导入hive 实践(一)
datax 支持多种数据源的相互读写,作为开源软件,提供了离线采集功能,方便系统开发,过程中遇到诸多配置,需要开发者自己探索,免费同样有成本 配置模板 {"setting": {},"job": {"s…...
)
Docker Compose部署Rabbitmq(脚本下载延迟插件)
整个工具的代码都在Gitee或者Github地址内 gitee:solomon-parent: 这个项目主要是总结了工作上遇到的问题以及学习一些框架用于整合例如:rabbitMq、reids、Mqtt、S3协议的文件服务器、mongodb github:GitHub - ZeroNing/solomon-parent: 这个项目主要是…...

麦当劳自助点餐机——实现
餐厅自助点餐优点 1. 降低服务成本: - 减少了对服务员数量的需求,降低了人力成本。 - 减轻了服务员的工作负担,使其能够更专注于提供优质的服务,如解决顾客的特殊需求和处理复杂问题。 2. 提升点餐效率和准确性…...

C++ STL CookBook 6:STL Containers (I)
目录 顺序容器 关联容器 容器适配器 使用统一擦除函数从容器中删除指定项 在恒定时间内对一个对排序不敏感的vector中删除项目 如果不确定自己访问容器会不会越界,那就使用.at方法而不是[] 在我们开始之前,先来回顾一下传统的经典的几个容器&#…...

行转列实现方式总结
前言 在日常开发中遇到了,需要对表中数据某个字段行数据转成列,个人觉得这中做目前想到两种, 一种是sql 操作, 另一种代码中做逻辑处理。 方式一 Java 操作 import lombok.Data;import java.util.ArrayList; import java.util.H…...

【go从零单排】初探goroutine
🌈Don’t worry , just coding! 内耗与overthinking只会削弱你的精力,虚度你的光阴,每天迈出一小步,回头时发现已经走了很远。 📗概念 Goroutines 是 Go 语言中的一种轻量级线程,用于并发编程。它们允许程…...

HarmonyOS NEXT应用元服务开发Intents Kit(意图框架服务)本地搜索接入方案
一、方案概述 当用户使用应用/元服务时,开发者可以按照标准意图Schema向系统共享数据,并支持意图调用(空调用与传参调用),以实现用户点击卡片后,可后台执行功能(例如播放指定歌曲)或…...

C语言可变参数列表编程实战指南:从基础概念到高级应用的全面解析
引言 在C语言中,可变参数列表的功能使得函数能够灵活地处理不确定数量的输入参数。本文将深入探讨可变参数列表的基础概念、技术原理及其在实际编程中的应用,帮助开发者更好地理解和使用这一特性。 一、可变参数列表的基本概念 1.1 什么是可变参数列表…...

AndroidStudio-文本显示
一、设置文本的内容 1.方式: (1)在XML文件中通过属性:android:text设置文本 例如: <?xml version"1.0" encoding"utf-8"?> <LinearLayout xmlns:android"http://schemas.andr…...
HBuilderX运行微信小程序,编译的文件在哪,怎么运行
1. 点击HBuilderX顶部的运行-运行到小程序模拟器-微信开发者工具,就会开始编译 2. 编译完成后的文件在根目录找到 unpackage -- dist -- dev -- mp-weixin, 这里面就是编译后的文件,如果未跳转到开发者工具,那可能是没设置启动路径࿰…...

百亿AI数字人社会初现:Project Sid展示智能代理文明进化路径
项目背景 Project Sid 是一项开创性的AI代理人文明实验,旨在通过新开发的认知架构 PIANO 探讨AI代理人是否能够在大规模数字社会中实现文明的演进。这项实验不仅展示了社会进步、角色分化、治理体系及文化传播等特征,还揭示了一个包含百亿“数字人类”的社会可能性。 PIANO…...

代码随想录训练营Day21 | 491.递增子序列 - 46.全排列 - 47.全排列 II - 332.重新安排行程 - 51.N皇后 - 37.解数独
491.递增子序列 题目链接:491.递增子序列思路:和子集那道题思路很像,每次在数组中选择一个数,选过的数不能选择,这里要求集合数量必须大于2个才能符合,仍然需要去重,但这里选额的是子序列&…...

Linux应用开发之网络套接字编程(实例篇)
服务端与客户端单连接 服务端代码 #include <sys/socket.h> #include <sys/types.h> #include <netinet/in.h> #include <stdio.h> #include <stdlib.h> #include <string.h> #include <arpa/inet.h> #include <pthread.h> …...

内存分配函数malloc kmalloc vmalloc
内存分配函数malloc kmalloc vmalloc malloc实现步骤: 1)请求大小调整:首先,malloc 需要调整用户请求的大小,以适应内部数据结构(例如,可能需要存储额外的元数据)。通常,这包括对齐调整,确保分配的内存地址满足特定硬件要求(如对齐到8字节或16字节边界)。 2)空闲…...

解锁数据库简洁之道:FastAPI与SQLModel实战指南
在构建现代Web应用程序时,与数据库的交互无疑是核心环节。虽然传统的数据库操作方式(如直接编写SQL语句与psycopg2交互)赋予了我们精细的控制权,但在面对日益复杂的业务逻辑和快速迭代的需求时,这种方式的开发效率和可…...
HTML 列表、表格、表单
1 列表标签 作用:布局内容排列整齐的区域 列表分类:无序列表、有序列表、定义列表。 例如: 1.1 无序列表 标签:ul 嵌套 li,ul是无序列表,li是列表条目。 注意事项: ul 标签里面只能包裹 li…...

Java多线程实现之Callable接口深度解析
Java多线程实现之Callable接口深度解析 一、Callable接口概述1.1 接口定义1.2 与Runnable接口的对比1.3 Future接口与FutureTask类 二、Callable接口的基本使用方法2.1 传统方式实现Callable接口2.2 使用Lambda表达式简化Callable实现2.3 使用FutureTask类执行Callable任务 三、…...

【android bluetooth 框架分析 04】【bt-framework 层详解 1】【BluetoothProperties介绍】
1. BluetoothProperties介绍 libsysprop/srcs/android/sysprop/BluetoothProperties.sysprop BluetoothProperties.sysprop 是 Android AOSP 中的一种 系统属性定义文件(System Property Definition File),用于声明和管理 Bluetooth 模块相…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个生活电费的缴纳和查询小程序
一、项目初始化与配置 1. 创建项目 ohpm init harmony/utility-payment-app 2. 配置权限 // module.json5 {"requestPermissions": [{"name": "ohos.permission.INTERNET"},{"name": "ohos.permission.GET_NETWORK_INFO"…...

涂鸦T5AI手搓语音、emoji、otto机器人从入门到实战
“🤖手搓TuyaAI语音指令 😍秒变表情包大师,让萌系Otto机器人🔥玩出智能新花样!开整!” 🤖 Otto机器人 → 直接点明主体 手搓TuyaAI语音 → 强调 自主编程/自定义 语音控制(TuyaAI…...
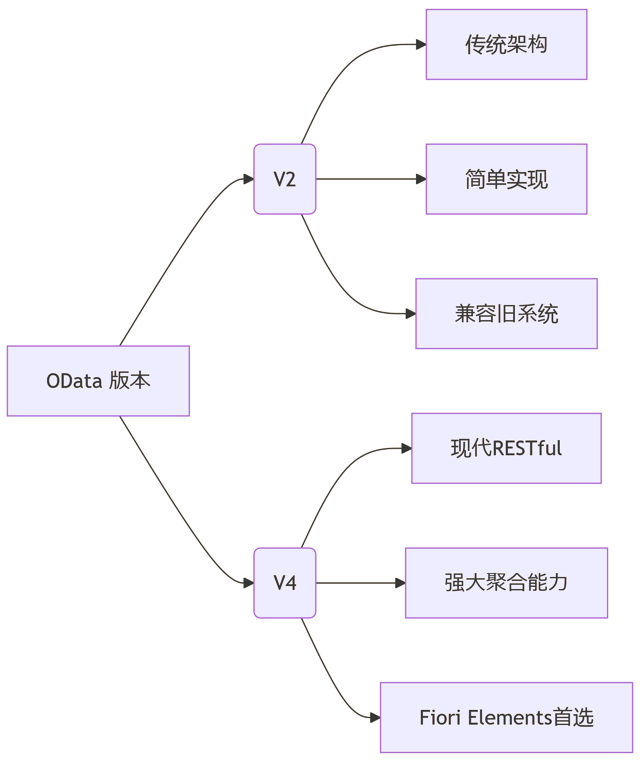
SAP学习笔记 - 开发26 - 前端Fiori开发 OData V2 和 V4 的差异 (Deepseek整理)
上一章用到了V2 的概念,其实 Fiori当中还有 V4,咱们这一章来总结一下 V2 和 V4。 SAP学习笔记 - 开发25 - 前端Fiori开发 Remote OData Service(使用远端Odata服务),代理中间件(ui5-middleware-simpleproxy)-CSDN博客…...
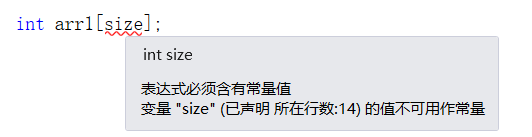
C++使用 new 来创建动态数组
问题: 不能使用变量定义数组大小 原因: 这是因为数组在内存中是连续存储的,编译器需要在编译阶段就确定数组的大小,以便正确地分配内存空间。如果允许使用变量来定义数组的大小,那么编译器就无法在编译时确定数组的大…...