基本功能实现
目录
1、环境搭建
2、按键控制灯&电机
LED
电机
垂直按键(机械按键)
3、串口调试功能
4、定时器延时和定时器中断
5、振动强弱调节
6、万年历
7、五方向按键
1、原理及分析
2、程序设计
1、环境搭建
需求:
搭建一个STM32F411CEU6工程
分析:
C / C++ 宏定义栏: STM32F411xE
在哪里找? STM32F411xE
2、按键控制灯&电机
需求:
按键控制灯和电机的开关
第一次按键:LED_ON
第二次按键:LED_OFF
第三次按键:MI_ON
第四次按键:MI_OFF
LED
创建.c和.h文件
添加文件到工程
看原理图
LED所用到的IO口
低电平点亮 高电平熄灭
输出模式
程序设计
LED初始化函数
/***********************************************
*函数名 :led_init
*函数功能 :对LED灯所用IO口初始化配置
*函数参数 :无
*函数返回值:无
*函数描述 :LED------PA7
************************************************/
void led_init(void)
{RCC->AHB1ENR |= (1<<0);GPIOA->MODER &= ~(3<<14);GPIOA->MODER |= (1<<14);GPIOA->OTYPER &= ~(1<<7);GPIOA->OSPEEDR &= ~(3<<14);GPIOA->PUPDR &= ~(3<<14);//初始状态 关GPIOA->ODR |= (1<<7);
}开关灯的宏定义
#ifndef _LED_H
#define _LED_H
#include "stm32f4xx.h" // Device header#define LED_OFF (GPIOA->ODR |= (1<<7))
#define LED_ON (GPIOA->ODR &= ~(1<<7))
#define LED_OVERTURN (GPIOA->ODR ^= (1<<7))void led_init(void);#endif电机
创建.c和.h文件
添加文件到工程
看原理图
电机所用到的IO口
高电平转动 低电平停止
输出模式
程序设计
电机初始化函数
/***********************************************
*函数名 :motor_init
*函数功能 :对电机所用IO口初始化配置
*函数参数 :无
*函数返回值:无
*函数描述 :motor------PB10
************************************************/
void motor_init(void)
{RCC->AHB1ENR |= (1<<1);GPIOB->MODER &= ~(3<<20);GPIOB->MODER |= (1<<20);GPIOB->OTYPER &= ~(1<<10);GPIOB->OSPEEDR &= ~(3<<20);GPIOB->PUPDR &= ~(3<<20);//初始状态 关GPIOB->ODR &= ~(1<<10);
}
电机转动和停止的宏定义
#ifndef _MOTOR_H
#define _MOTOR_H#include "stm32f4xx.h" // Device header#define MI_OFF (GPIOB->ODR &= ~(1<<10))
#define MI_ON (GPIOB->ODR |= (1<<10))
#define MI_OVERTURN (GPIOB->ODR ^= (1<<10))void motor_init(void);
#endif垂直按键(机械按键)
创建.c和.h文件
添加文件到工程
看原理图
按键所用到的IO口
高电平按下 低电平抬起
输入模式
程序设计
按键初始化函数
static void delay_ms(u32 ms)
{u32 i = 100 / 4 * 1000 * ms;while(i){i--;}
}/***********************************************
*函数名 :key_init
*函数功能 :对KEY所用IO口初始化配置
*函数参数 :无
*函数返回值:无
*函数描述 :KEY_OK------PA0
************************************************/
void key_init(void)
{RCC->AHB1ENR |= (1<<0);GPIOA->MODER &= ~(3<<0);GPIOA->PUPDR &= ~(3<<0);
}
按键扫描函数
/***********************************************
*函数名 :key_scan
*函数功能 :按键扫描函数
*函数参数 :无
*函数返回值:u8
*函数描述 :
************************************************/
u8 key_scan(void)
{u8 key = 0xff;static u8 key_flag = 1;//判断按键按下if(KEY && key_flag){delay_ms(15);if(KEY){key = KEY_OK;key_flag = 0;MOTOR_VAL = 1000;timer_buff[3]=0; }}//判断按键抬起if(!KEY){key_flag = 1;}return key;
}
3、串口调试功能
程序设计
串口初始化配置
/***********************************************
*函数名 :usart1_init
*函数功能 :串口1初始化配置
*函数参数 :u32 bps
*函数返回值:无
*函数描述 :USART1_Tx ---------PA9 USART1_Rx ---------PA10
************************************************/
void usart1_init(u32 bps)
{/*IO口控制器配置*///端口时钟使能RCC->AHB1ENR |= (1<<0);//端口模式配置GPIOA->MODER &= ~((3<<18) | (3<<20));GPIOA->MODER |= ((2<<18) | (2<<20));//端口输出类型GPIOA->OTYPER &= ~(1<<9);//端口输出速度GPIOA->OSPEEDR &= ~(3<<18); //2M//上下拉配置GPIOA->PUPDR &= ~((3<<18) | (3<<20));//复用功能配置GPIOA->AFR[1] &= ~(15<<4);GPIOA->AFR[1] |= (7<<4); //PA9配置串口1的发送复用功能GPIOA->AFR[1] &= ~(15<<8);GPIOA->AFR[1] |= (7<<8); //PA10配置串口1的接收复用功能/*串口1控制器配置*///串口时钟使能RCC->APB2ENR |= (1<<4);//CR1USART1->CR1 &= ~(1<<15); //16倍过采样USART1->CR1 &= ~(1<<12); //8位字长USART1->CR1 |= (1<<3) ; //发送使能USART1->CR1 |= (1<<2) ; //接收使能//CR2USART1->CR2 &= ~(3<<12); //1个停止位//BRRUSART1->BRR = 100000000/bps;/*NVIC控制器配置*///优先级分组-----------------------------主函数其他初始化上面//计算优先级编码值u32 pri = NVIC_EncodePriority (5,1,2);//设确定具体中断源NVIC_SetPriority(USART1_IRQn, pri);//使能NVIC响应通道NVIC_EnableIRQ(USART1_IRQn);//串口1空闲中断使能USART1->CR1 |= (1<<4);//串口1接收中断使能USART1->CR1 |= (1<<5);//串口使能USART1->CR1 |= (1<<13);}发送一个字节函数
/***********************************************
*函数名 :usart1_send_byte
*函数功能 :串口1发送一个字节函数
*函数参数 :u8 data
*函数返回值:无
*函数描述 :
************************************************/
void usart1_send_byte(u8 data)
{//等待之前的发送完成(等待转态寄存器的发送完成位置1)while(!(USART1->SR & (1<<6)));// //把要发送的数据赋值给数据寄存器USART1->DR = data;}
发送一个字符串函数
/***********************************************
*函数名 :usart1_send_str
*函数功能 :串口1发送一个字符串函数
*函数参数 :u8 *str
*函数返回值:无
*函数描述 :
************************************************/
void usart1_send_str(u8 *str)
{while(*str != '\0'){//发送字符usart1_send_byte(*str);//下一字符的地址str++;}}中断服务函数
/***********************************************
*函数名 :USART1_IRQHandler
*函数功能 :串口1中断服务函数
*函数参数 :无
*函数返回值:无
*函数描述 :
************************************************/
u8 usart1_buff[10];void USART1_IRQHandler(void)
{u8 data;//判断是接收中断信号触发if(USART1->SR & (1<<5)){//清除中断标志位//紧急事件}//判断是空闲中断信号触发if(USART1->SR & (1<<4)){//清除中断标志位USART1->SR;USART1->DR;//紧急事件}}4、定时器延时和定时器中断
定时器延时用timer11
定时器11没有单次计数配置,只能是循环计数,
等待计数完成后,要关闭定时器。
定时器中断用timer9
注意:
时钟频率
分频
不同的芯片可能没有基本定时器6和7
程序设计
定时器11毫秒延时函数
/***********************************************
*函数名 :tim11_delay_ms
*函数功能 :定时器11延时
*函数参数 :u16 ms
*函数返回值:无
*函数描述 :100MHZ--------------100000/ms10000分频-----------10/ms
************************************************/
void tim11_delay_ms(u16 ms)
{//定时器时钟使能RCC->APB2ENR |= (1<<18);//CR1TIM11->CR1 |= (1<<7); //使能影子寄存器//TIM11->CR1 |= (1<<3); //单次计数模式TIM11->CR1 &= ~(1<<1); //产生更新事件//PSC分频寄存器TIM11->PSC = 10000-1; //10000分频//ARR重载寄存器TIM11->ARR = 10 * ms - 1;//人为产生更新事件UGTIM11->EGR |= (1<<0);//清除状态寄存器更新完成位TIM11->SR &= ~(1<<0);//使能计数器TIM11->CR1 |= (1<<0);//等待计数完成while(!(TIM11->SR & (1<<0)));//关闭定时器TIM11->CR1 &= ~(1<<0);}定时器11微秒延时函数
/***********************************************
*函数名 :TIM11_delay_us
*函数功能 :定时器11延时微秒
*函数参数 :u16 us
*函数返回值:无
*函数描述 :100MHZ--------------100/us50分频-----------2/us
************************************************/
void TIM11_delay_us(u16 us)
{//定时器时钟使能RCC->APB2ENR |= (1<<18);//CR1TIM11->CR1 |= (1<<7); //使能影子寄存器//TIM11->CR1 |= (1<<3); //单次计数模式TIM11->CR1 &= ~(1<<1); //产生更新事件//PSC分频寄存器TIM11->PSC = 50-1; //50分频//ARR重载寄存器TIM11->ARR = 2 * us - 1;//人为产生更新事件UGTIM11->EGR |= (1<<0);//清除状态寄存器更新完成位TIM11->SR &= ~(1<<0);//使能计数器TIM11->CR1 |= (1<<0);//等待计数完成while(!(TIM11->SR & (1<<0)));//关闭定时器TIM11->CR1 &= ~(1<<0);
}定时器9毫秒级定时中断函数
/***********************************************
*函数名 :tim9_interrupt_ms
*函数功能 :定时器9毫秒级定时中断
*函数参数 :u16 ms
*函数返回值:无
*函数描述 :100MHZ--------------100000/ms10000分频-----------10/ms
************************************************/
void tim9_interrupt_ms(u16 ms)
{/*定时器控制器配置*///定时器时钟使能RCC->APB2ENR |= (1<<16);//CR1TIM9->CR1 |= (1<<7); //使能影子寄存器TIM9->CR1 &= ~(1<<3); //循环计数模式TIM9->CR1 &= ~(1<<2); TIM9->CR1 &= ~(1<<1); //PSC 分频TIM9->PSC = 10000-1;//ARRTIM9->ARR = 10 * ms - 1;//EGR UG位,人为产生更新事件 状态寄存器的0号位置1;TIM9->EGR |= (1<<0);//清零状态寄存器TIM9->SR &= ~(1<<0); /*NVIC控制器配置*/ //优先级分组//计算优先级编码值u32 pri = NVIC_EncodePriority (5,1,1);//设确定具体中断源NVIC_SetPriority(TIM1_BRK_TIM9_IRQn, pri);//使能NVIC响应通道NVIC_EnableIRQ(TIM1_BRK_TIM9_IRQn);//DIER 定时中断使能TIM9->DIER |= (1<<0);//定时器使能TIM9->CR1 |= (1<<0);
}5、振动强弱调节
电机变速用PWM
通过查复用表可知:

电机-----PB10--------TIM2_CH3
程序设计
定时器2通道3输出PWM驱动电机函数
/***********************************************
*函数名 :tim2_ch3_pwm_motor
*函数功能 :定时器2通道3驱动PB10,输出PWM
*函数参数 :无
*函数返回值:无
*函数描述 :100MHZ--------------100000/ms-----100/us100分频-----------1/us周期定位1ms PB10
************************************************/
void tim2_ch3_pwm_motor(void)
{/*IO控制器配置*///端口时钟使能RCC->AHB1ENR |= (1<<1);//端口模式配置-------复用模式GPIOB->MODER &= ~(3<<20);GPIOB->MODER |= (2<<20);//输出类型GPIOB->OTYPER &= ~(1<<10);//输出速度GPIOB->OSPEEDR &= ~(3<<20);//上下拉GPIOB->PUPDR &= ~(3<<20);//复用功能寄存器GPIOB->AFR[1] &= ~(15<<8);GPIOB->AFR[1] |= (1<<8);/*通用定时器控制器配置*///定时器时钟使能RCC->APB1ENR |= (1<<0);//CR1TIM2->CR1 |= (1<<7); //重载的影子寄存器TIM2->CR1 &= ~(3<<5); //边沿对齐计数模式TIM2->CR1 &= ~(1<<4); //递增计数TIM2->CR1 &= ~(1<<3); //连续模式TIM2->CR1 &= ~(1<<2);TIM2->CR1 &= ~(1<<1);//SMCRTIM2->SMCR &= ~(7<<0); //选择内部时钟//CCMRxTIM2->CCMR2 &= ~(3<<0); //把通道3定位输出通道TIM2->CCMR2 |= (1<<3); //比较寄存器影子TIM2->CCMR2 &= ~(7<<4);TIM2->CCMR2 |= (6<<4); //PWM1//CCERTIM2->CCER &= ~(1<<9); //高电平为有效电平//PSCTIM2->PSC = 100-1;//ARRTIM2->ARR = 1000-1;//CCRxTIM2->CCR3 = 0;//EGRTIM2->EGR |= (1<<0); //人为产生更新事件//通道3打开TIM2->CCER |= (1<<8);//定时器使能TIM2->CR1 |= (1<<0);
}6、万年历
时钟源 外部低速时钟 32.768KHZ
内部低速时钟 32KHZ
程序设计
RTC初始化配置
/***********************************************
*函数名 :RTC_init
*函数功能 :RTC初始化配置
*函数参数 :无
*函数返回值:无
*函数描述 :
************************************************/
void RTC_init(RTC_t time)
{/*解除RTC和相关寄存器保护*///使能电源控制器时钟RCC->APB1ENR |= (1<<28);//PWR->CR 的DBP位写1解除RTC控制器保护 PWR->CR |= (1<<8);//秘钥寄存器写入值,解除RTC相关寄存器保护RTC->WPR = 0xca;RTC->WPR = 0x53;/*RTC时钟源设置*///使能内部低速震荡器RCC->CSR |= (1<<0);//等待内部部振荡器就绪while(!(RCC->CSR & (1<<1)));//选择内部低速时钟源RCC->BDCR |= (2<<8);//使能RTC时钟RCC->BDCR |= (1<<15);/*RTC相关寄存器*///CRRTC->CR &= ~(1<<6); //24hRTC->CR &= ~(1<<5); //开影子寄存器RTC->WPR = 0xff;/*设置初始时间*/if(RTC->BKP0R != 500){RTC->BKP0R = 500;set_time(time);}}
设置时间函数
/***********************************************
*函数名 :in_dec_out_bcd
*函数功能 :将十进制数据转换成BCD码形式
*函数参数 :u8 dec
*函数返回值:u8
*函数描述 :设置时间时候使用
************************************************/
u8 in_dec_out_bcd(u8 dec)
{return ((dec / 10) << 4) | (dec % 10);
}/***********************************************
*函数名 :set_time
*函数功能 :设置时间函数
*函数参数 :RTC_t time
*函数返回值:无
*函数描述 :
************************************************/
void set_time(RTC_t time)
{u32 temp_t = 0;u32 temp_d = 0;//解除寄存器保护RTC->WPR = 0xca;RTC->WPR = 0x53;//让日历进入初始化模式RTC->ISR |= (1<<7);//等待可以更新日历值while(!(RTC->ISR & (1<<6)));//将设置的十进制数据转换成BCD码temp_t = (in_dec_out_bcd(time.h))<<16 |(in_dec_out_bcd(time.m))<<8 |in_dec_out_bcd(time.s);temp_d =(in_dec_out_bcd(time.year-2000))<<16 |(in_dec_out_bcd(time.week))<<13 |(in_dec_out_bcd(time.mon))<<8 |(in_dec_out_bcd(time.day));//设置TR 和 DRRTC->TR = temp_t;RTC->DR = temp_d;//退出初始化模式RTC->ISR &= ~(1<<7);//激活写保护RTC->WPR = 0xff;}获取时间函数
/***********************************************
*函数名 :in_bcd_out_dec
*函数功能 :将BCD码形式数据转换成十进制
*函数参数 :u8 bcd
*函数返回值:u8
*函数描述 :获取时间使用
************************************************/
u8 in_bcd_out_dec(u8 bcd)
{return (bcd >> 4) * 10 + (bcd & 0x0f);
}/***********************************************
*函数名 :get_time
*函数功能 :获取时间函数
*函数参数 :无
*函数返回值:RTC_t
*函数描述 :
************************************************/
RTC_t get_time(void)
{RTC_t t;u32 temp_t = 0;u32 temp_d = 0;//解除寄存器保护RTC->WPR = 0xca;RTC->WPR = 0x53;//ISR寄存器中RSF位0RTC->ISR &= ~(1<<5);//等待同步完成(等待ISR寄存器中RSF位自动变为1)while(!(RTC->ISR & (1<<5)));//读出时间寄存器的值(BCD码)temp_t = RTC->TR;//ISR寄存器中RSF位0RTC->ISR &= ~(1<<5);//等待同步完成(等待ISR寄存器中RSF位自动变为1)while(!(RTC->ISR & (1<<5)));//读出日期寄存器的值(BCD码)temp_d = RTC->DR;//将读出的BCD码转换成十进制形式t.year = in_bcd_out_dec((temp_d & 0xff0000) >> 16) + 2000;t.week = in_bcd_out_dec((temp_d & 0xe000) >> 13);t.mon = in_bcd_out_dec((temp_d & 0x1f00) >> 8);t.day = in_bcd_out_dec((temp_d & 0x3f) >> 0);t.h = in_bcd_out_dec(temp_t >> 16);t.m = in_bcd_out_dec(temp_t >> 8);t.s = in_bcd_out_dec(temp_t >> 0);//激活写保护RTC->WPR = 0xff;//返回结构体变量return t;
}7、五方向按键
1、原理及分析
需求:
五方向的按键扫描函数
分析:
垂直按键不参与ADC控制
其他四方向的原理:通过ADC转换得到不同的份数,每份份数代表着不同的方向

通过原理图用到的是PA3
通过查表知道用到ADC1的通道3

四个按键方向接在ADC1的3号通道上,不同的方向接了不同的电阻,不同的按键方向就会体现不同的电压值,不同电压值通过AD转换,就会体现出不同的份数.不同的份数就可以识别不同方向的按键.
2、程序设计
设计ADC相关程序
ADC的配置方式有两种:中断的方式获取数据、查询等待的方式获取数据
查询等待的方式:
ADC初始化配置函数
/***********************************************
*函数名 :adc1_ch3_Init
*函数功能 :ADC1通道3
*函数参数 :无
*函数返回值:无
*函数描述 :PA3-----ADC1_CH3------四方向按键
************************************************/
void adc1_ch3_Init(void)
{/*IO口控制器配置*///端口时钟使能RCC->AHB1ENR |= (1<<0);GPIOA->MODER &= ~(3<<6);GPIOA->MODER |= (3<<6); //模拟模式/*ADC控制器配置*///ADC控制器时钟使能RCC->APB2ENR |= (1<<8);//CR1ADC1->CR1 &= ~(3<<24); //精度12位ADC1->CR1 |= (1<<8); //扫描模式//CR2ADC1->CR2 &= ~(1<<11); //右对齐ADC1->CR2 |= (1<<10); //每个转换完成标志位就置1ADC1->CR2 &= ~(1<<1); //单次//SMPRADC1->SMPR2 |= (7<<9); //通道3,480个周期//SQR1ADC1->SQR1 &= ~(0xf<<20); //一共有一个转换 //SQR3ADC1->SQR3 &= ~(0x1f<<0);ADC1->SQR3 |= (3<<0); //第一个转换是3号通道//CCRADC->CCR &= ~(3<<16);ADC->CCR |= (1<<16); //4分频//ADC使能ADC1->CR2 |= (1<<0);
}获取转换数据函数
/***********************************************
*函数名 :get_adc1_data
*函数功能 :获取adc1的转换数据
*函数参数 :无
*函数返回值:u16
*函数描述 :PA3-----ADC1_CH3------四方向按键
************************************************/
u16 get_adc1_data(void)
{u16 data;//开始转换ADC1->CR2 |= (1<<30);//等待转换完成 while(!(ADC1->SR & (1<<1)));//获取转换数据到变量data = ADC1->DR;//返回转换值return data;
}
通过调用ADC的获取函数,再通过测试按键,得到不同方向的份数值
KEY_UP 1000~1100
KEY_Down 1300~1400
KEY_L >=4000
KEY_R 2000~2100
设计四方向按键相关程序
四方向按键扫描函数
/***********************************************
*函数名 :fun_key_init
*函数功能 :五方向按键初始化
*函数参数 :无
*函数返回值:无
*函数描述 :
************************************************/
void fun_key_init(void)
{key_init();adc1_ch3_Init();
}/***********************************************
*函数名 :fun_key_scan
*函数功能 :五方向按键扫描函数
*函数参数 :无
*函数返回值:u8
*函数描述 :
************************************************/
u8 fun_key_scan(void)
{u16 data;u8 key_data = 0xff;static u8 adc_flag = 1;//四方向按键data = get_adc1_data();if(adc_flag && data >= 1000 && data <= 1100 ) //UP{adc_flag = 0;key_data = KEY_UP;}else if(adc_flag && data >= 1300 && data <= 1400) //Down{adc_flag = 0;key_data = KEY_Down;}else if(adc_flag && data > 4000) //left{adc_flag = 0;key_data = KEY_Left;}else if(adc_flag && data >= 2000 && data <= 2100) //right{adc_flag = 0;key_data = KEY_Right;}if(data < 20){//解锁标志位adc_flag = 1;}return key_data;
}
结合垂直按键写出五方向按键扫描函数
/***********************************************
*函数名 :fun_key_scan
*函数功能 :五方向按键扫描函数
*函数参数 :无
*函数返回值:u8
*函数描述 :
************************************************/
u8 fun_key_scan(void)
{u16 data;u8 key_data = 0xff;static u8 adc_flag = 1;//垂直按键key_data = key_scan();//四方向按键data = get_adc1_data();if(adc_flag && data >= 1000 && data <= 1100 ) //UP{adc_flag = 0;key_data = KEY_UP;}else if(adc_flag && data >= 1300 && data <= 1400) //Down{adc_flag = 0;key_data = KEY_Down;}else if(adc_flag && data > 4000) //left{adc_flag = 0;key_data = KEY_Left;}else if(adc_flag && data >= 2000 && data <= 2100) //right{adc_flag = 0;key_data = KEY_Right;}if(data < 20){//解锁标志位adc_flag = 1;}return key_data;
}
若想要实现,按住不抬起能每隔一秒返回一次键值?
利用定时中断,超时检测1S解锁一次标志位
u8 fun_key_scan(void)
{u16 data;u8 key_data = 0xff;static u8 adc_flag = 1;//垂直按键key_data = key_scan();//四方向按键data = get_adc1_data();if(adc_flag && data >= 1000 && data <= 1100 ) //UP{adc_flag = 0;key_data = KEY_UP;timer_buff[3]=0; //开始1s计时MOTOR_VAL = 1000;}else if(adc_flag && data >= 1300 && data <= 1400) //Down{adc_flag = 0;key_data = KEY_Down;timer_buff[3]=0; //开始1s计时MOTOR_VAL = 1000;}else if(adc_flag && data > 4000) //left{adc_flag = 0;key_data = KEY_Left;timer_buff[3]=0; //开始1s计时MOTOR_VAL = 1000;}else if(adc_flag && data >= 2000 && data <= 2100) //right{adc_flag = 0;key_data = KEY_Right;timer_buff[3]=0; //开始1s计时MOTOR_VAL = 1000;}if(data < 20 || timer_buff[3]==1000){//解锁标志位adc_flag = 1;}return key_data;
}
相关文章:
基本功能实现
目录 1、环境搭建 2、按键控制灯&电机 LED 电机 垂直按键(机械按键) 3、串口调试功能 4、定时器延时和定时器中断 5、振动强弱调节 6、万年历 7、五方向按键 1、原理及分析 2、程序设计 1、环境搭建 需求: 搭建一个STM32F411CEU6工程 分析: C / C 宏定义栏…...

《那个让服务器“跳舞”的bug》
在程序的世界里,bug 就像隐藏在暗处的小怪兽,时不时跳出来捣乱。而在我的职业生涯中,有一个bug让我至今难忘,它不仅让项目差点夭折,还让我熬了无数个通宵。这个故事发生在一个风和日丽的下午,我们正在开发一…...

Python 网络爬虫进阶:动态网页爬取与反爬机制应对
在上一篇文章中,我们学习了如何使用 Python 构建一个基本的网络爬虫。然而,在实际应用中,许多网站使用动态内容加载或实现反爬机制来阻止未经授权的抓取。因此,本篇文章将深入探讨以下进阶主题: 如何处理动态加载的网…...

创建可直接用 root 用户 ssh 登陆的 Docker 镜像
有时候我们在 Mac OS X 或 Windows 平台下需要开发以 Linux 为运行时的应用,IDE 或可直接使用 Docker 容器,或 SSH 远程连接。本地命令行下操作虽然可以用 docker exec 连接正在运行的容器,但 IDE 远程连接的话 SSH 总是一种较为通用的连接方…...

wordpress 中添加图片放大功能
功能描述 使用 Fancybox 实现图片放大和灯箱效果。自动为文章内容中的图片添加链接,使其支持 Fancybox。修改了 header.php 和 footer.php 以引入必要的 CSS 和 JS 文件。在 functions.php 中通过过滤器自动为图片添加 data-fancybox 属性。 最终代码 1. 修改 hea…...

数据结构 (7)线性表的链式存储
前言 线性表是一种基本的数据结构,用于存储线性序列的元素。线性表的存储方式主要有两种:顺序存储和链式存储。链式存储,即链表,是一种非常灵活和高效的存储方式,特别适用于需要频繁插入和删除操作的场景。 链表的基本…...

库的操作.
创建、删除数据库 创建语法: CREATE DATABASE [IF NOT EXISTS] db_name[ ]是可选项,IF NOT EXISTS 是表明如果不存在才能创建数据库 //查看数据库,假设7行 show databases; //创建数据库 --- 本质在Linux创建一个目录 create database databa…...
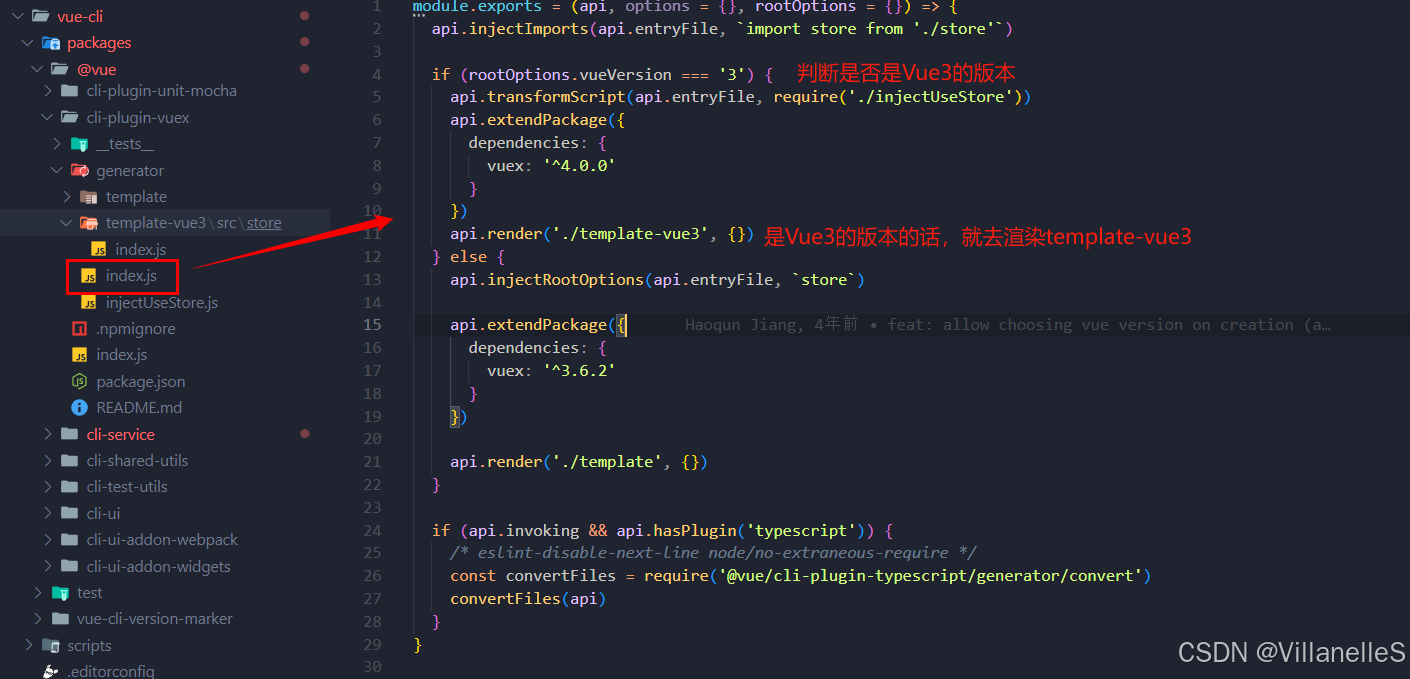
Vue进阶之Vue CLI服务—@vue/cli-service Vuex
Vue CLI服务—vue/cli-service & Vuex vue/cli-service初识bin/vue-cli-service.js代码执行解读 Vuexgenerator/index.jsstore/index.js插件化的能力怎么引入呢? vue/cli-service 初识 第一块是上一个讲述的cli是把我们代码的配置项,各种各样的插件…...

导入100道注会cpa题的方法,导入试题,自己刷题
一、问题描述 复习备考的小伙伴们,往往希望能够利用零碎的时间和手上的试题,来复习和备考 用一个能够导入自己试题的刷题工具,既能加强练习又能利用好零碎时间,是一个不错的解决方案 目前市面上刷题工具存下这些问题 1、要收费…...

数据库操作、锁特性
1. DML、DDL和DQL是数据库操作语言的三种主要类型 1.1 DML(Data Manipulation Language)数据操纵语言 DML是用于检索、插入、更新和删除数据库中数据的SQL语句。 主要的DML语句包括: SELECT:用于查询数据库中的数据。 INSERT&a…...

学习笔记039——SpringBoot整合Redis
文章目录 1、Redis 基本操作Redis 默认有 16 个数据库,使用的是第 0 个,切换数据库添加数据/修改数据查询数据批量添加批量查询删除数据查询所有的 key清除当前数据库清除所有数据库查看 key 是否存在设置有效期查看有效期 2、Redis 数据类型String追加字…...

(笔记)简单了解ZYNQ
1、zynq首先是一个片上操作系统(Soc),结合了arm(PS)和fpga(PL)两部分组成 Zynq系统主要由两部分组成:PS(Processing System)和PL(Programmable L…...

大众点评小程序mtgsig1.2算法
测试效果: var e function _typeof(o) {return "function" typeof Symbol && "symbol" typeof Symbol.iterator? function (o) {return typeof o;}: function (o) {return o && "function" typeof Symbol &…...
七牛云AIGC内容安全方案助力企业合规创新
随着人工智能生成内容(AIGC)技术的飞速发展,内容审核的难度也随之急剧上升。在传统审核场景中,涉及色情、政治、恐怖主义等内容的标准相对清晰明确,但在AIGC的应用场景中,这些界限变得模糊且难以界定。用户可能通过交互性引导AI生成违规内容,为审核工作带来了前所未有的不可预测…...

.net的winfrom程序 窗体透明打开窗体时出现在屏幕右上角
窗体透明, 将Form的属性Opacity,由默认的100% 调整到 80%,这个数字越小越透明(尽量别低于50%,不信你试试看)! 打开窗体时出现在屏幕右上角 //构造函数 public frmCalendarList() {InitializeComponent();//打开窗体&…...
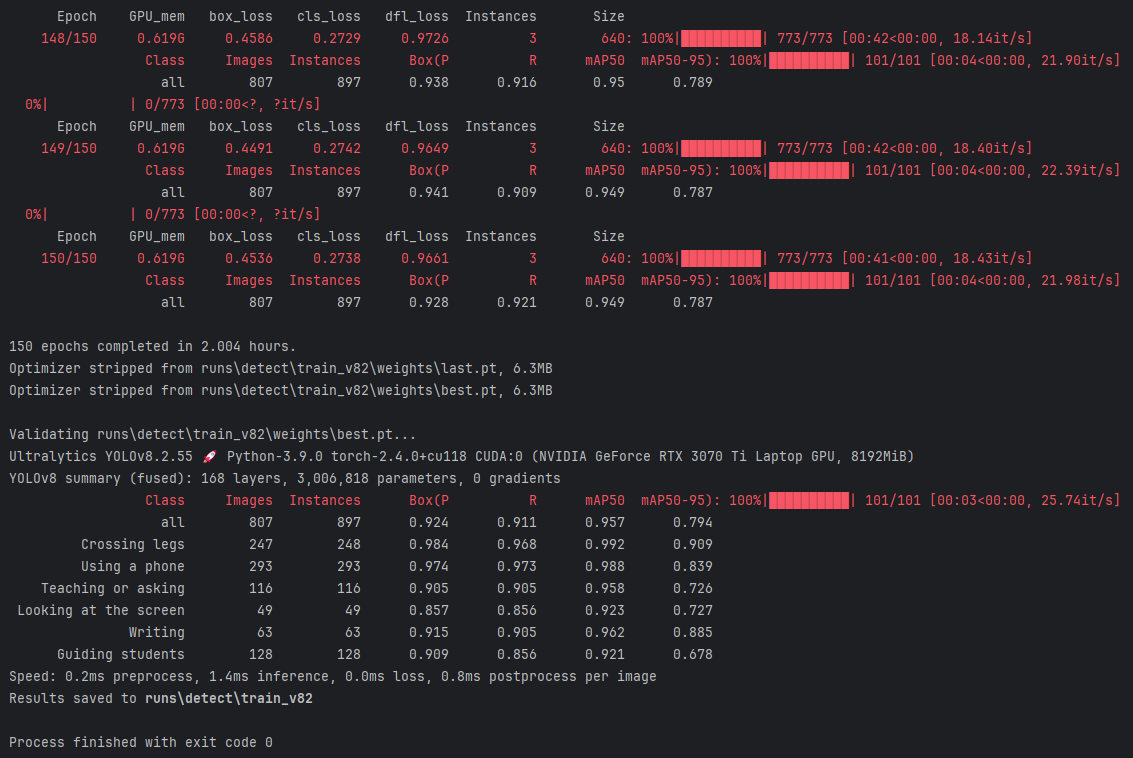
基于YOLOv8深度学习的智慧课堂教师上课行为检测系统研究与实现(PyQt5界面+数据集+训练代码)
随着人工智能技术的迅猛发展,智能课堂行为分析逐渐成为提高教学质量和提升教学效率的关键工具之一。在现代教学环境中,能够实时了解教师的课堂表现和行为,对于促进互动式教学和个性化辅导具有重要意义。传统的课堂行为分析依赖于人工观测&…...

使用 Tkinter 创建一个简单的 GUI 应用程序来合并视频和音频文件
使用 Tkinter 创建一个简单的 GUI 应用程序来合并视频和音频文件 Python 是一门强大的编程语言,它不仅可以用于数据处理、自动化脚本,还可以用于创建图形用户界面 (GUI) 应用程序。在本教程中,我们将使用 Python 的标准库模块 tkinter 创建一…...

【C++笔记】模板进阶
前言 各位读者朋友们大家好!上一期我们讲了stack、queue以及仿函数。先前我们讲过模板的初阶内容,这一期我们来更深入的学习一下模板。 一. 非类型模板参数 1.1 非类型模板参数 模板参数分为类型形参和类类型形参: 类型形参:…...

Soul App创始人张璐团队亮相GITEX GLOBAL 2024,展示多模态AI的交互创新
随着全球AI领域的竞争加剧,越来越多的科技巨头和创新企业纷纷致力于多模态AI的开发。2024年10月14日至18日,GITEX GLOBAL海湾信息技术博览会在迪拜举行,吸引了超过6700家全球科技巨头和创新公司参与,展示了智能互联、人工智能等领域的新成果。 此次展会中,Soul App创始人张璐团…...

ffmpeg.wasm 在浏览器运行ffmpeg操作视频
利用ffmpeg.wasm,可以在浏览器里运行ffmpeg,实现对音视频的操作 参考链接: https://blog.csdn.net/jchsgwbr/article/details/143252044 https://gitee.com/CXBalCai/ffmpeg-template 其他参考 https://github.com/ffmpegwasm/ffmpeg.wasm https://b…...
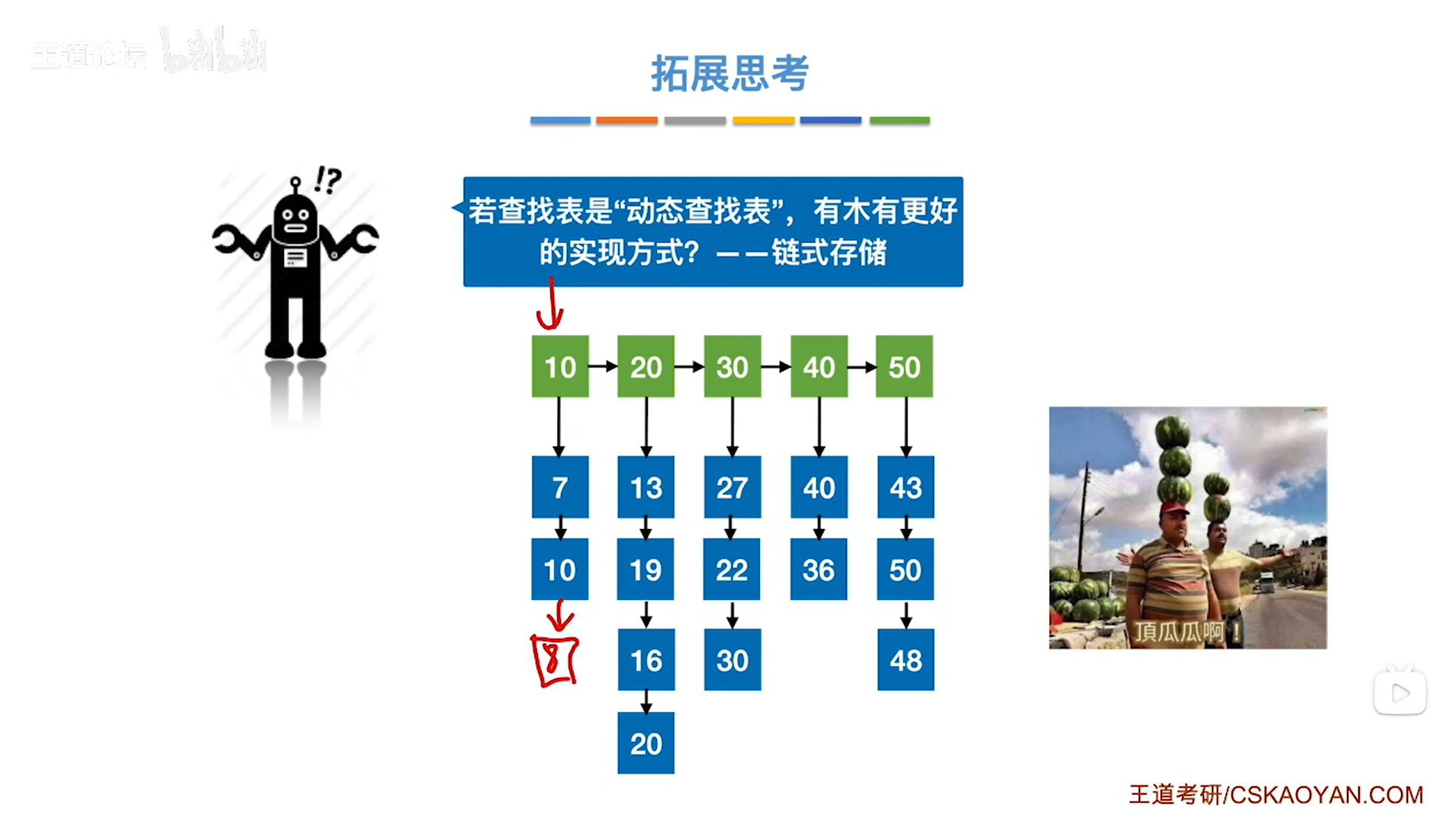
7.4.分块查找
一.分块查找的算法思想: 1.实例: 以上述图片的顺序表为例, 该顺序表的数据元素从整体来看是乱序的,但如果把这些数据元素分成一块一块的小区间, 第一个区间[0,1]索引上的数据元素都是小于等于10的, 第二…...

模型参数、模型存储精度、参数与显存
模型参数量衡量单位 M:百万(Million) B:十亿(Billion) 1 B 1000 M 1B 1000M 1B1000M 参数存储精度 模型参数是固定的,但是一个参数所表示多少字节不一定,需要看这个参数以什么…...
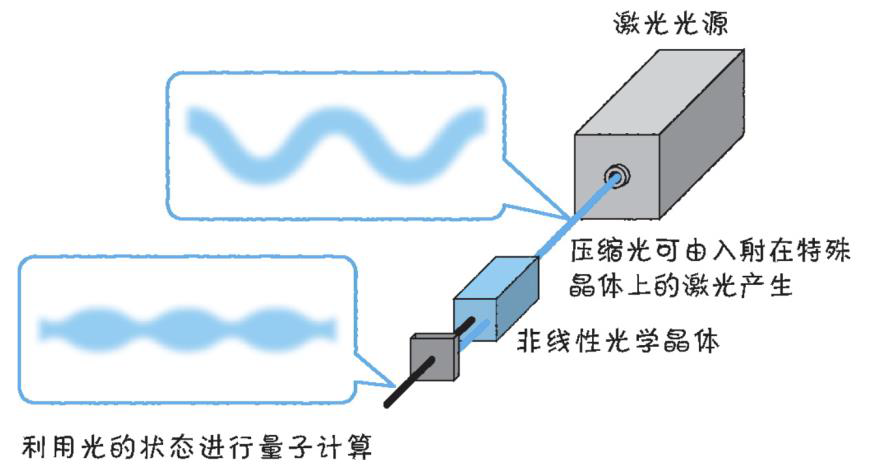
以光量子为例,详解量子获取方式
光量子技术获取量子比特可在室温下进行。该方式有望通过与名为硅光子学(silicon photonics)的光波导(optical waveguide)芯片制造技术和光纤等光通信技术相结合来实现量子计算机。量子力学中,光既是波又是粒子。光子本…...

代码随想录刷题day30
1、零钱兑换II 给你一个整数数组 coins 表示不同面额的硬币,另给一个整数 amount 表示总金额。 请你计算并返回可以凑成总金额的硬币组合数。如果任何硬币组合都无法凑出总金额,返回 0 。 假设每一种面额的硬币有无限个。 题目数据保证结果符合 32 位带…...
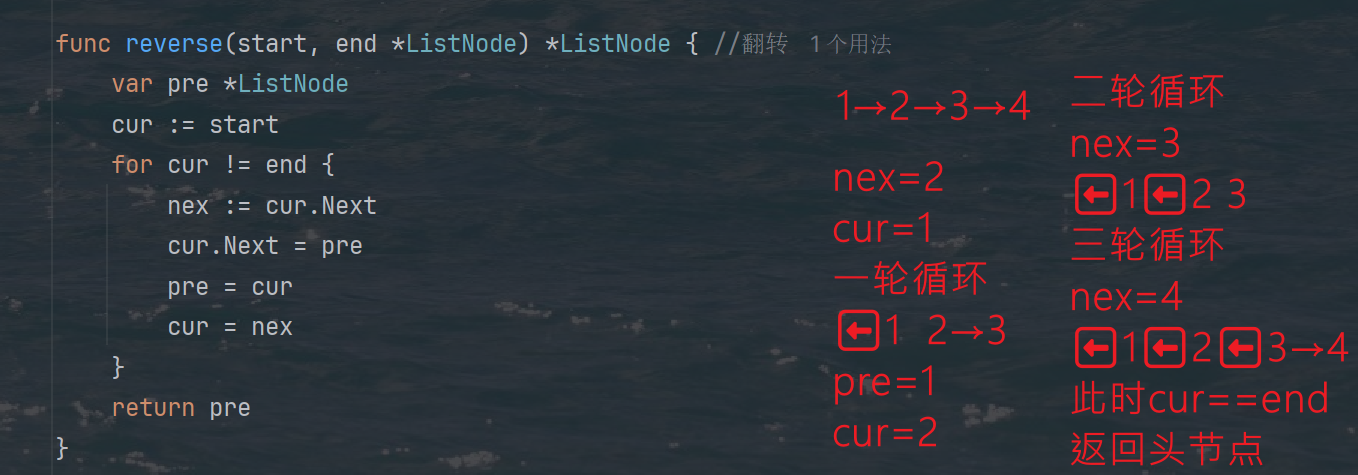
力扣热题100 k个一组反转链表题解
题目: 代码: func reverseKGroup(head *ListNode, k int) *ListNode {cur : headfor i : 0; i < k; i {if cur nil {return head}cur cur.Next}newHead : reverse(head, cur)head.Next reverseKGroup(cur, k)return newHead }func reverse(start, end *ListNode) *ListN…...
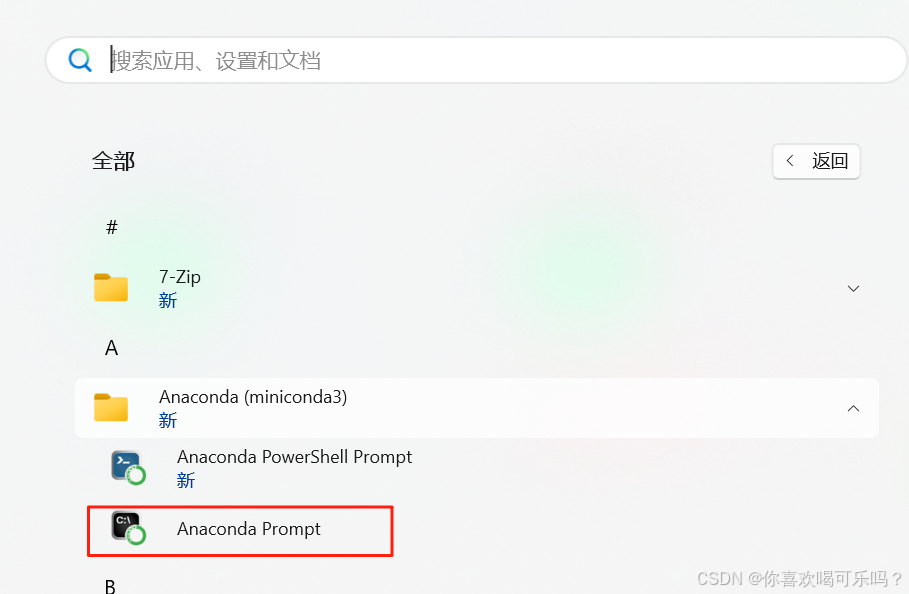
Windows安装Miniconda
一、下载 https://www.anaconda.com/download/success 二、安装 三、配置镜像源 Anaconda/Miniconda pip 配置清华镜像源_anaconda配置清华源-CSDN博客 四、常用操作命令 Anaconda/Miniconda 基本操作命令_miniconda创建环境命令-CSDN博客...
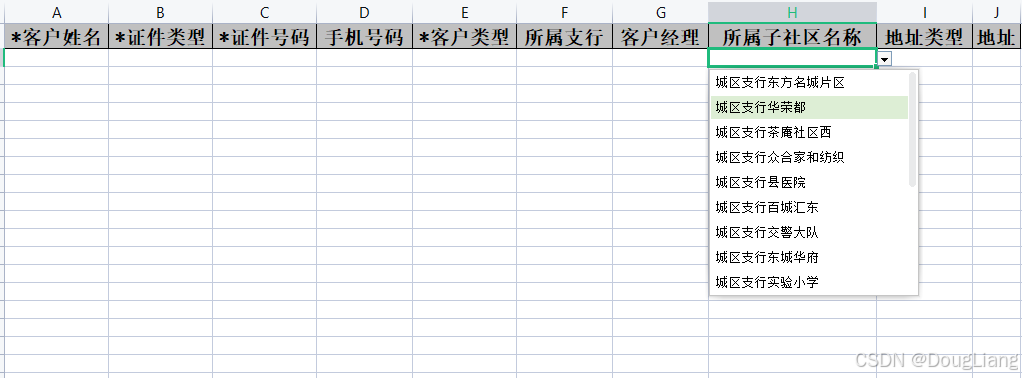
关于easyexcel动态下拉选问题处理
前些日子突然碰到一个问题,说是客户的导入文件模版想支持部分导入内容的下拉选,于是我就找了easyexcel官网寻找解决方案,并没有找到合适的方案,没办法只能自己动手并分享出来,针对Java生成Excel下拉菜单时因选项过多导…...

Python网页自动化Selenium中文文档
1. 安装 1.1. 安装 Selenium Python bindings 提供了一个简单的API,让你使用Selenium WebDriver来编写功能/校验测试。 通过Selenium Python的API,你可以非常直观的使用Selenium WebDriver的所有功能。 Selenium Python bindings 使用非常简洁方便的A…...

EasyRTC音视频实时通话功能在WebRTC与智能硬件整合中的应用与优势
一、WebRTC与智能硬件整合趋势 随着物联网和实时通信需求的爆发式增长,WebRTC作为开源实时通信技术,为浏览器与移动应用提供免插件的音视频通信能力,在智能硬件领域的融合应用已成必然趋势。智能硬件不再局限于单一功能,对实时…...

当下AI智能硬件方案浅谈
背景: 现在大模型出来以后,打破了常规的机械式的对话,人机对话变得更聪明一点。 对话用到的技术主要是实时音视频,简称为RTC。下游硬件厂商一般都不会去自己开发音视频技术,开发自己的大模型。商用方案多见为字节、百…...