ubuntu+ROS推视频流至网络
目录
概述
工具
ros_rtsp
接受流
web_video_server
源码安装
二进制安装
ros接收rtsp视频流
总结
概述
ros_rtsp功能包可以将ros视频流以rtsp形式推送
web_video_server功能包可以将ros视频话题推HTTP流
rocon_rtsp_camera_relay可以接受同一网段下的rtsp视频流输出为ros话题信息,进行再处理
工具
ubuntu系统PC
接发工具为siyi遥控器,siyi云台相机等
siyi遥控器带安卓系统,里面的qgc地面站可以接收rtsp视频流,而siyi云台连接网口后会自动发送rtsp流
ros_rtsp
提前建好工作空间
cd catkin_ws
git clone https://github.com/CircusMonkey/ros_rtsp.git
cd ..
catkin_make -DCATKIN_WHITELIST_PACKAGES="ros_rtsp" #这行指令为单独编译这个包 进入config修改配置文件

更改下面的source参数为相机话题
终端输入
roslaunch ros_rtsp rtsp_streams.launch

在浏览器中输入
rtsp://0.0.0.0:8554/front
会直接打开视频,较高延迟
接受流
对于一些设备自带接受rtsp流视频的软件
或者直接在浏览器输入
web_video_server
源码安装
cd catkin_ws/src
git clone https://github.com/RobotWebTools/web_video_server.git
cd ..
catkin_make
二进制安装
sudo apt-get install ros-$ROS_DISTRO-web-video-server建议源码安装,方便更改IP地址和话题
进入launch编辑启动文件web_video_server.launch
<launch><node pkg="web_video_server" type="web_video_server" name="web_video_server" output="screen"><param name="port" type="int" value="8080" /><param name="address" type="string" value="10.255.77.205" /><param name="server_threads" type="int" value="1" /><param name="ros_threads" type="string" value="2" /><param name="width" type="int" value="1280" /><param name="height" type="int" value="1080" /><param name="quality" type="int" value="90" /></node>
</launch>port为端口,默认8080
address为ip地址,一般为自己电脑地址
打开一个相机驱动launch(任意相机都可)
roslaunch usb_acm usb_cam.launch然后输入
roslaunch web_video_server web_video_server.launch 他会自动将相机图像话题推流

在同一局域网下的设备进入浏览器输入
10.255.77.205:8080
会打开

这里有所有的相机话题,延迟很低
ros接收rtsp视频流
git clone https://github.com/robotics-in-concert/rocon_devices进入catkin_ws进行编译
catkin_make -DCATKIN_WHITELIST_PACKAGES="rocon_rtsp_camera_relay"这行指令为单独编译这个包
修改launch文件

<launch><arg name="video_stream_url" default="rtsp://0.0.0.0:8554/back"/><node pkg="rocon_rtsp_camera_relay" name="rtsp_camera_relay" type="rocon_rtsp_camera_relay_node"><param name="video_stream_url" value="$(arg video_stream_url)"/></node>
</launch>更改ip即可
输入
roslaunch rocon_rtsp_camera_relay rtsp_camera_relay.launch
可以查看话题

和普通相机驱动一样,可以查看画面和内参(camera_info)

不过这里内参是空的,是由于他无法读取ros标定的相机参数,可以在代码里进行修改
读取文件或直接复制内参
增加如下代码进行手动赋值
ci.distortion_model = "head_camera";ci.D = {0.03893528054100122, -0.3485441168559756, 0.03216230030094155, 0.003306613122592447, 0};ci.K = {666.7638040975144, 0, 307.7119479657995, 0, 675.2068368652186, 292.3638681443858, 0, 0, 1};ci.R = {1, 0, 0, 0, 1, 0, 0, 0, 1};ci.P = {665.2471923828125, 0, 308.53816715844, 0, 0, 662.948486328125, 302.4687334700211, 0, 0, 0, 1, 0};这里的内参如何而来,可以用ros自带的相机标定工具,标定完成后生成的head_camera文件内有相机内参。
文件在/.ros/camera_info里

一行一行复制过来即可。
这样话题就有数据了。

总结
对于大部分相机或图像信息推送rtsp流的形式,直接用网线连接省去了wifi这一步骤,所以就需要进行ros接受流来处理图像信息,可以进行识别或图像处理的二次开发。
(http流是否也可以直接连网线,本人没有试过)
感谢观看!
相关文章:
ubuntu+ROS推视频流至网络
目录 概述 工具 ros_rtsp 接受流 web_video_server 源码安装 二进制安装 ros接收rtsp视频流 总结 概述 ros_rtsp功能包可以将ros视频流以rtsp形式推送 web_video_server功能包可以将ros视频话题推HTTP流 rocon_rtsp_camera_relay可以接受同一网段下的rtsp视频流输出为…...

PHP 去掉特殊不可见字符 “\u200e“
描述 最近在排查网站业务时,发现有数据匹配失败的情况 肉眼上完全看不出问题所在 当把字符串 【M24308/23-14F】复制出来发现 末尾有个不可见的字符 使用删除键或左右移动时才会发现 最后测试通过 var_dump 打印 发现这个"空字符"占了三个长度 …...

深度学习—BP算法梯度下降及优化方法Day37
梯度下降 1.公式 w i j n e w w i j o l d − α ∂ E ∂ w i j w_{ij}^{new} w_{ij}^{old} - \alpha \frac{\partial E}{\partial w_{ij}} wijnewwijold−α∂wij∂E α为学习率 当α过小时,训练时间过久增加算力成本,α过大则容易造成越过最…...

elasticsearch8.16 docker-compose 多机器集群安装
在网上找了一圈, 发现要么就是单机版的部署了多个节点, 很少有多台机器部署集群的, 有些就拿官网的例子写一写, 没有实战经验, 下面分享一个教程, 实实在在的多台机器, 每台机器部署2个节点的例子 先上.env , docker-compose.yml文件, 这个文件是核心, 里面掺杂太多坑, 已经帮你…...

Flink--API 之 Source 使用解析
目录 一、Flink Data Sources 分类概览 (一)预定义 Source (二)自定义 Source 二、代码实战演示 (一)预定义 Source 示例 基于本地集合 基于本地文件 基于网络套接字(socketTextStream&…...

uniapp在小程序连接webScoket实现余额支付
webScoket文档:uni.connectSocket(OBJECT) | uni-app官网 /plugins/event.js const Dep function() {this.Evens Object.create(null); } class Event {constructor({dep new Dep()} {}) {if (dep.constructor Object && Object.keys(dep).length 0…...

Spring Boot【三】
自动注入 xml中可以在bean元素中通过autowire属性来设置自动注入的方式: <bean id"" class"" autowire"byType|byName|constructor|default" /> byName:按照名称进行注入 byType:按类型进行注入 constr…...

R 因子
R 因子 引言 在金融领域,风险管理和投资策略的优化一直是核心议题。传统的风险度量工具,如波动率、Beta系数等,虽然在一定程度上能够帮助投资者理解市场的波动和资产的相对风险,但它们往往无法全面捕捉到市场动态的复杂性。因此…...

【博主推荐】C# Winform 拼图小游戏源码详解(附源码)
文章目录 前言摘要1.设计来源拼图小游戏讲解1.1 拼图主界面设计1.2 一般难度拼图效果1.3 普通难度拼图效果1.4 困难难度拼图效果1.5 地域难度拼图效果1.6 内置五种拼图效果 2.效果和源码2.1 动态效果2.2 源代码 源码下载结束语 前言 在数字浪潮汹涌澎湃的时代,程序开…...

深入解析 MySQL 启动方式:`systemctl` 与 `mysqld` 的对比与应用
目录 前言1. 使用 systemctl 启动 MySQL1.1 什么是 systemctl1.2 systemctl 启动 MySQL 的方法1.3 应用场景1.4 优缺点优点缺点 2. 使用 mysqld 命令直接启动 MySQL2.1 什么是 mysqld2.2 mysqld 启动 MySQL 的方法2.3 应用场景2.4 优缺点优点缺点 3. 对比分析结语 前言 MySQL …...

【python】windows pip 安装 module 提示 Microsoft Visual C++ 14.0 is required 处理方法
参考链接:https://blog.csdn.net/qzzzxiaosheng/article/details/12511900 1.问题引入 在使用pip 安装一些module经常会出现报错: Microsoft Visual C 14.0 is required. Get it with “Microsoft Visual C Build Tools很明显这是缺少C的编译的相关依…...

python爬虫案例——猫眼电影数据抓取之字体解密,多套字体文件解密方法(20)
文章目录 1、任务目标2、网站分析3、代码编写1、任务目标 目标网站:猫眼电影(https://www.maoyan.com/films?showType=2) 要求:抓取该网站下,所有即将上映电影的预约人数,保证能够获取到实时更新的内容;如下: 2、网站分析 进入目标网站,打开开发者模式,经过分析,我…...

go sync.WaitGroup
1、数据结构 type WaitGroup struct {noCopy noCopystate atomic.Uint64 // high 32 bits are counter, low 32 bits are waiter count.sema uint32 } 计数器:原子变量,高32位用于为协程计数,低32位为等待计数(被Wait阻塞等待&a…...

Libevent库-http通信不同请求方式的处理
做项目的时候用到了http通信,同事用libevent库写的,特此记录后端从前端拿到消息后的处理方式 void CHTTPTest::request(const std::any & data) {// data 是从前端拿到的数据void *obj std::any_cast<void *>(data); // std::any是C17新标准…...
关于node全栈项目打包发布linux项目问题总集
1.用pm2部署nest 说明:如果一开始将nest直接打包放到linux服务器上用pm2执行则会报错,这是因为tsconfig.build.tsbuildinfo文件的路径以及相关依赖问题。 报错会为:什么东西找不到.... 所以建议以下为步骤一步一步配置 将整个nest添加压缩包直…...

常见的上、下采样方法
常见的上采样方法 反卷积(Deconvolution)或转置卷积(Transpose Convolution):通过学习可逆卷积核来进行上采样,增加特征图的尺寸。插值(Interpolation)ÿ…...

如何解决 java.rmi.NotBoundException: RMI 中没有绑定的对象问题?亲测有效的解决方法!
java.rmi.NotBoundException 是 Java RMI(Remote Method Invocation)中的一个常见异常,它通常出现在远程方法调用过程中,表示在 RMI 注册表中找不到指定的绑定对象。换句话说,当客户端尝试查找一个远程对象(…...

设计模式:14、抽象工厂模式(配套)
目录 0、定义 1、抽象工厂模式的四种角色 2、抽象工厂的UML类图 3、示例代码 0、定义 提供一个创建一系列或相互依赖对象的接口,而无须指定它们具体的类。 1、抽象工厂模式的四种角色 抽象产品(Product):一个抽象类或接口&a…...

Linux环境基础开发工具使用
目录 1. Linux软件包管理器yum 1.1 什么是软件包 1.2 Linux软件生态 1.3 关于rzsz 1.4 注意事项 1.5 查看软件包 2. Linux编辑器-vim使用 2.1 vim的基本概念 2.2 vim的基本操作 2.3 简单vim配置 3. 编译器gcc/g 3.1 背景知识 3.2 gcc编译选项 3.2.1 预处理…...

AI生成的一个.netcore 经典后端架构
下面是一个完整的 .NET Core 后端项目示例,使用 Dapper 作为轻量级 ORM 访问 Oracle 数据库,并实现高性能架构。我们将实现学生表、课程表、成绩表和班级表的基本增删改查功能,以及查询某个班级学生成绩的功能,并使用自定义缓存来…...
)
浏览器访问 AWS ECS 上部署的 Docker 容器(监听 80 端口)
✅ 一、ECS 服务配置 Dockerfile 确保监听 80 端口 EXPOSE 80 CMD ["nginx", "-g", "daemon off;"]或 EXPOSE 80 CMD ["python3", "-m", "http.server", "80"]任务定义(Task Definition&…...
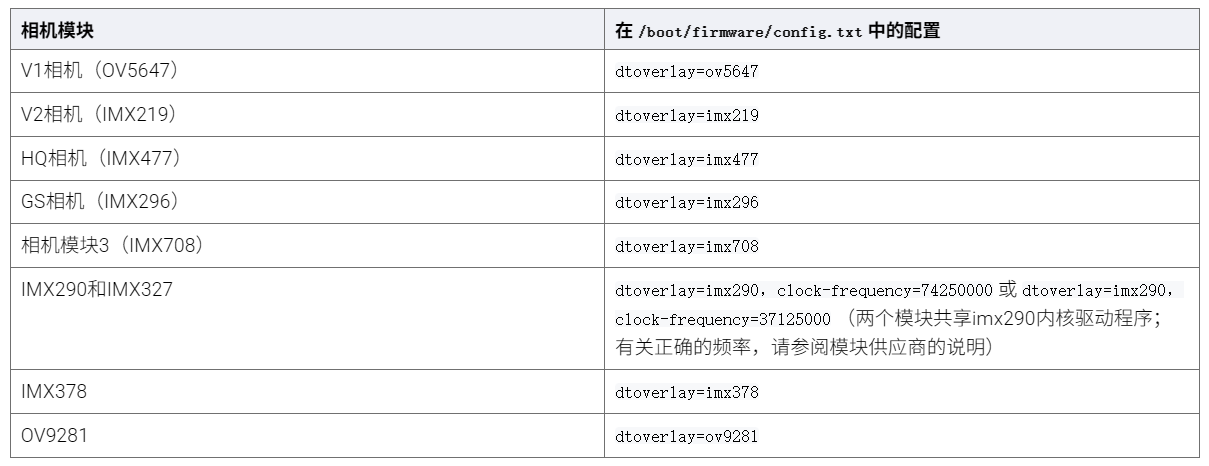
树莓派超全系列教程文档--(61)树莓派摄像头高级使用方法
树莓派摄像头高级使用方法 配置通过调谐文件来调整相机行为 使用多个摄像头安装 libcam 和 rpicam-apps依赖关系开发包 文章来源: http://raspberry.dns8844.cn/documentation 原文网址 配置 大多数用例自动工作,无需更改相机配置。但是,一…...
)
React Native 导航系统实战(React Navigation)
导航系统实战(React Navigation) React Navigation 是 React Native 应用中最常用的导航库之一,它提供了多种导航模式,如堆栈导航(Stack Navigator)、标签导航(Tab Navigator)和抽屉…...

【SpringBoot】100、SpringBoot中使用自定义注解+AOP实现参数自动解密
在实际项目中,用户注册、登录、修改密码等操作,都涉及到参数传输安全问题。所以我们需要在前端对账户、密码等敏感信息加密传输,在后端接收到数据后能自动解密。 1、引入依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId...

电脑插入多块移动硬盘后经常出现卡顿和蓝屏
当电脑在插入多块移动硬盘后频繁出现卡顿和蓝屏问题时,可能涉及硬件资源冲突、驱动兼容性、供电不足或系统设置等多方面原因。以下是逐步排查和解决方案: 1. 检查电源供电问题 问题原因:多块移动硬盘同时运行可能导致USB接口供电不足&#x…...
《通信之道——从微积分到 5G》读书总结
第1章 绪 论 1.1 这是一本什么样的书 通信技术,说到底就是数学。 那些最基础、最本质的部分。 1.2 什么是通信 通信 发送方 接收方 承载信息的信号 解调出其中承载的信息 信息在发送方那里被加工成信号(调制) 把信息从信号中抽取出来&am…...

论文浅尝 | 基于判别指令微调生成式大语言模型的知识图谱补全方法(ISWC2024)
笔记整理:刘治强,浙江大学硕士生,研究方向为知识图谱表示学习,大语言模型 论文链接:http://arxiv.org/abs/2407.16127 发表会议:ISWC 2024 1. 动机 传统的知识图谱补全(KGC)模型通过…...

【AI学习】三、AI算法中的向量
在人工智能(AI)算法中,向量(Vector)是一种将现实世界中的数据(如图像、文本、音频等)转化为计算机可处理的数值型特征表示的工具。它是连接人类认知(如语义、视觉特征)与…...

Ascend NPU上适配Step-Audio模型
1 概述 1.1 简述 Step-Audio 是业界首个集语音理解与生成控制一体化的产品级开源实时语音对话系统,支持多语言对话(如 中文,英文,日语),语音情感(如 开心,悲伤)&#x…...

OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别
OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别 直接训练提示词嵌入向量的核心区别 您提到的代码: prompt_embedding = initial_embedding.clone().requires_grad_(True) optimizer = torch.optim.Adam([prompt_embedding...