Gazebo插件相机传感器(可订阅/camera/image_raw话题)
在仿真环境中使用相机传感器,通常需要结合Gazebo插件来实现。Gazebo是一个功能强大的机器人仿真工具,支持多种传感器模型,包括相机。下面是如何在Gazebo中使用相机传感器的详细步骤。
1. 修改Xacro文件以包含Gazebo插件
首先,修改camera_sensor.xacro文件,添加Gazebo插件以启用相机传感器功能。
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- Camera Sensor --><xacro:macro name="camera_sensor" params="parent xyz rpy"><link name="camera_link"><visual><geometry><box size="0.03 0.03 0.03"/></geometry><material name="black"><color rgba="0 0 0 1"/></material></visual><collision><geometry><box size="0.03 0.03 0.03"/></geometry></collision><inertial><mass value="0.2"/><inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001"/></inertial></link><joint name="camera_joint" type="fixed"><parent link="${parent}"/><child link="camera_link"/><origin xyz="${xyz}" rpy="${rpy}"/></joint><!-- Gazebo Camera Plugin --><gazebo reference="camera_link"><sensor type="camera" name="camera_sensor"><update_rate>30.0</update_rate><camera name="camera"><horizontal_fov>1.047</horizontal_fov><image><width>640</width><height>480</height><format>R8G8B8</format></image><clip><near>0.1</near><far>100</far></clip></camera><plugin name="camera_controller" filename="libgazebo_ros_camera.so"><alwaysOn>true</alwaysOn><updateRate>30.0</updateRate><cameraName>camera</cameraName><imageTopicName>image_raw</imageTopicName><cameraInfoTopicName>camera_info</cameraInfoTopicName><frameName>camera_link</frameName><hackBaseline>0.07</hackBaseline><distortionK1>0.0</distortionK1><distortionK2>0.0</distortionK2><distortionK3>0.0</distortionK3><distortionT1>0.0</distortionT1><distortionT2>0.0</distortionT2></plugin></sensor></gazebo></xacro:macro></robot>
2. 在机器人URDF中使用相机传感器宏
在你的机器人URDF文件中,使用camera_sensor宏来添加相机传感器。
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="my_robot"><!-- Include the camera sensor xacro file --><xacro:include filename="$(find your_package_name)/urdf/camera_sensor.xacro"/><!-- Base Link --><link name="base_link"/><!-- Add the camera sensor to the robot --><xacro:camera_sensor parent="base_link" xyz="0.1 0 0.2" rpy="0 0 0"/></robot>
3. 启动Gazebo仿真
确保你已经安装了Gazebo和相关的ROS包。然后,使用以下命令启动Gazebo并加载你的机器人模型。
roslaunch your_package_name gazebo.launch
4. 查看相机图像
在Gazebo中,相机传感器会自动发布图像到ROS主题。你可以使用rqt_image_view工具查看相机图像。
rosrun rqt_image_view rqt_image_view
在rqt_image_view中选择/camera/image_raw主题,即可查看相机捕获的图像。
在 Gazebo 和 ROS 的集成中,<cameraName>, <imageTopicName>, <cameraInfoTopicName>, 和 <frameName> 这些参数用于配置摄像头传感器的发布和设置。以下是对这些参数的具体解释:
<cameraName>camera</cameraName>
- 用途:
cameraName参数指定了摄像头的名称。这个名称通常用于标识摄像头传感器在 Gazebo 中的实例。它可以帮助你在 Gazebo 中识别和管理不同的摄像头传感器。- 在 ROS 中,这个名称可能用于生成相关的 ROS 节点和话题名称,但它主要是一个标识符。
<imageTopicName>image_raw</imageTopicName>
- 用途:
imageTopicName参数指定了摄像头图像数据发布的话题名称。在这个例子中,话题名称为image_raw。- 这意味着摄像头捕获的图像数据将以
image_raw话题发布。你可以订阅这个话题来获取摄像头的原始图像数据。
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
- 用途:
cameraInfoTopicName参数指定了摄像头信息发布的话题名称。在这个例子中,话题名称为camera_info。- 这个话题发布的是摄像头的内参信息(如焦距、中心点、畸变系数等),通常用于图像处理和计算机视觉算法。
- 例如,在使用 OpenCV 或 ROS 的图像处理库(如
image_proc)时,需要这个信息来进行图像校正和处理。
<frameName>camera_link</frameName>
- 用途:
frameName参数指定了摄像头数据的参考坐标系。在这个例子中,坐标系名称为camera_link。- 这意味着摄像头捕获的图像数据将以
camera_link坐标系为参考系。这对于坐标系转换和数据对齐非常重要。
话题名称总结
-
图像话题名称:
image_raw- 发布的内容:摄像头捕获的原始图像数据。
- 数据类型:通常是
sensor_msgs/Image或sensor_msgs/CompressedImage。
-
摄像头信息话题名称:
camera_info- 发布的内容:摄像头的内参信息(如焦距、中心点、畸变系数等)。
- 数据类型:
sensor_msgs/CameraInfo。
示例配置
假设你在 Gazebo 中配置了一个摄像头传感器,如下所示:
<gazebo reference="camera_link"><sensor type="camera" name="camera"><update_rate>30.0</update_rate><cameraName>camera</cameraName><imageTopicName>image_raw</imageTopicName><cameraInfoTopicName>camera_info</cameraInfoTopicName><frameName>camera_link</frameName><plugin name="camera_controller" filename="libgazebo_ros_camera.so"><alwaysOn>true</alwaysOn><updateRate>30.0</updateRate><cameraName>camera</cameraName><imageTopicName>/camera/image_raw</imageTopicName><cameraInfoTopicName>/camera/camera_info</cameraInfoTopicName><frameName>camera_link</frameName></plugin></sensor>
</gazebo>
总结
<cameraName>:用于标识摄像头传感器。<imageTopicName>:指定摄像头图像数据发布的话题名称。<cameraInfoTopicName>:指定摄像头信息发布的话题名称。<frameName>:指定摄像头数据的参考坐标系。
这些参数确保摄像头数据在正确的坐标系中发布,并且可以通过指定的话题名称获取图像和摄像头信息,方便后续的图像处理和计算机视觉应用。
创建ROS节点来订阅图像话题
创建一个新的C++文件,例如image_subscriber.cpp,并添加以下代码:
#include <ros/ros.h>
#include <sensor_msgs/Image.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>void imageCallback(const sensor_msgs::ImageConstPtr& msg)
{try{// Convert ROS Image message to OpenCV imagecv::Mat cv_image = cv_bridge::toCvShare(msg, "bgr8")->image;// Display the imagecv::imshow("Image window", cv_image);cv::waitKey(3);}catch (cv_bridge::Exception& e){ROS_ERROR("cv_bridge exception: %s", e.what());}
}int main(int argc, char** argv)
{ros::init(argc, argv, "image_subscriber");ros::NodeHandle nh;// Subscribe to the image topicros::Subscriber sub = nh.subscribe("/camera/image_raw", 1, imageCallback);ros::spin();cv::destroyAllWindows();return 0;
}
2. 编译C++节点(如果使用C++)
如果使用C++,你需要将这个节点添加到你的ROS包的CMakeLists.txt文件中。首先,确保安装了OpenCV和必要的ROS依赖项。
在你的CMakeLists.txt文件中添加以下内容:
find_package(OpenCV REQUIRED)
find_package(catkin REQUIRED COMPONENTSroscppsensor_msgscv_bridge
)add_executable(image_subscriber src/image_subscriber.cpp)
target_link_libraries(image_subscriber ${catkin_LIBRARIES} ${OpenCV_LIBRARIES})通过在Xacro文件中添加Gazebo相机插件,你可以在仿真环境中模拟相机传感器,并将其数据发布到ROS主题。这样,你就可以在仿真环境中使用相机数据进行各种机器人任务的开发和测试。
相关文章:
)
Gazebo插件相机传感器(可订阅/camera/image_raw话题)
在仿真环境中使用相机传感器,通常需要结合Gazebo插件来实现。Gazebo是一个功能强大的机器人仿真工具,支持多种传感器模型,包括相机。下面是如何在Gazebo中使用相机传感器的详细步骤。 1. 修改Xacro文件以包含Gazebo插件 首先,修…...

华三(HCL)和华为(eNSP)模拟器共存安装手册
接上章叙述,解决同一台PC上同时部署华三(HCL)和华为(eNSP)模拟器。原因就是华三HCL 的老版本如v2及以下使用VirtualBox v5版本,可以直接和eNSP兼容Oracle VirtualBox,而其他版本均使用Oracle VirtualBox v6以上的版本,…...

信息学奥赛一本通 1448:【例题1】电路维修 | 洛谷 P4667 [BalticOI 2011 Day1] Switch the Lamp On 电路维修
【题目链接】 ybt 1448:【例题1】电路维修 洛谷 P4667 [BalticOI 2011 Day1] Switch the Lamp On 电路维修 【题目考点】 1. 双端队列广搜(0-1BFS) 【解题思路】 整个电路是由一个个的正方形的电路元件组成,每个正方形有四个…...

k8s删除网络组件错误
k8s集群删除calico网络组件重新部署flannel网络组件,再部署pod后出现报错不能分配ip地址 plugin type"calico" failed (add): error getting ClusterInformation: connection is unauthorized: Unauthorized 出现该问题是因为删除网络组件后,网…...

MySQL之JDBC
我们在学习完了数据库的基本操作后,希望和我们的Java程序建立连接,那么我们今天就来一探究竟JDBC是如何让Java程序与数据库建立连接的 1. 什么是JDBC JDBC(Java Data Base Connectivity, Java数据库连接) 是Java程序和数据库之间…...

音视频入门基础:MPEG2-TS专题(10)——PAT简介
一、引言 当某个transport packet的TS Header中的PID属性的值为0x0000时,该transport packet的payload为Program association table ,即 PAT表。PAT表包含所有PMT表的目录列表,将program_number和PMT表的PID相关联,获取数据的起始…...

ElementUI:el-drawer实现在父组件区域内打开抽屉组件非全屏
我们在开发ElementUI的时候遇到抽屉组件全屏的问题,但是我们需要在指定div中展示出来,上代码: 1、在el-drawer中增加属性 el-drawerstyle"position: absolute"z-index"-1":append-to-body"false">// do s…...

Vue教程|搭建vue项目|Vue-CLI2.x 模板脚手架
一、项目构建环境准备 在构建Vue项目之前,需要搭建Node环境以及Vue-CLI脚手架,由于本篇文章为上一篇文章的补充,也是为了给大家分享更为完整的搭建vue项目方式,所以环境准备部分采用Vue教程|搭建vue项目|V…...

jmeter学习(7)命令行控制
jmeter -n -t E:\IOT\test2.jmx -l E:\IOT\output\output.jtl -j E:\IOT\output\jmeter.log -e -o E:\IOT\output\report IOT下创建output 文件夹,jmx文件名避免中文,再次执行output.jtl不能有数据要删除...

BGP协议路由黑洞
一、实验环境 1、分公司与运营商AS自治系统内运行IGP路由协议OSPF、RIP或静态路由,AS自治系统内通过IBGP路由协议建立BGP邻居关系。 2、公司AS自治系统与运营商AS自治系统间运行EBGP路由协议。 3、通过loopback建立IBGP与EBGP邻居关系,发挥loopback建立…...

存储结构及关系(一)
学习目标 描述数据库的逻辑结构列出段类型及其用途列出控制块空间使用的关键字获取存储结构信息 段的类型 段是数据库中占用空间的对象。它们使用数据库数据文件中的空间。介绍不同类型的段。 表 表是在数据库中存储数据的最常用方法。表段用于存储既没有集群也没有分区的表…...

玄机应急:linux入侵排查webshell查杀日志分析
目录 第一章linux:入侵排查 1.web目录存在木马,请找到木马的密码提交 2.服务器疑似存在不死马,请找到不死马的密码提交 3.不死马是通过哪个文件生成的,请提交文件名 4.黑客留下了木马文件,请找出黑客的服务器ip提交 5.黑客留…...

python爬虫安装教程
Python爬虫是用于从网站上自动抓取信息的程序。在开始之前,请确保您了解并遵守目标网站的服务条款,尊重版权法,并且在合理合法的范围内使用爬虫技术。 安装环境 安装Python:首先确保您的计算机上已经安装了Python。推荐版本为3.…...

田忌赛马五局三胜问题matlab代码
问题描述:在可以随机选择出场顺序的情况下,如果把比赛规则从三局两胜制改为五局三胜制,齐王胜出的概率是上升了还是下降了?五局三胜的赛制下,大家的马重新分为5个等级。前提条件仍然是齐王每种等级的马都优于田忌同等级…...

Spring循环依赖问题的解决
项目启动提示如下异常: The dependencies of some of the beans in the application context form a cycle 这表明在我们的应用中存在了循环依赖,示例: Bean A 中注入了Bean B依赖,然后 Bean B 中注入了Bean A依赖。也就是说&…...

KAN-Transfomer——基于新型神经网络KAN的时间序列预测
1.数据集介绍 ETT(电变压器温度):由两个小时级数据集(ETTh)和两个 15 分钟级数据集(ETTm)组成。它们中的每一个都包含 2016 年 7 月至 2018 年 7 月的七种石油和电力变压器的负载特征。 traffic(交通) :描…...

鸿蒙学习自由流转与分布式运行环境-价值与架构定义(1)
文章目录 价值与架构定义1、价值2、架构定义 随着个人设备数量越来越多,跨多个设备间的交互将成为常态。基于传统 OS 开发跨设备交互的应用程序时,需要解决设备发现、设备认证、设备连接、数据同步等技术难题,不但开发成本高,还存…...

【k8s深入理解之 Scheme 补充-2】理解 register.go 暴露的 AddToScheme 函数
AddToScheme 函数 AddToScheme 就是为了对外暴露,方便别人调用,将当前Group组的信息注册到其 Scheme 中,以便了解该 Group 组的数据结构,用于后续处理 项目版本用途使用场景k8s.io/apiV1注册资源某一外部版本数据结构࿰…...

uni-app写的微信小程序每次换账号登录时出现缓存上一个账号数据的问题
uni-app写的微信小程序每次更换另外账号登录时出现缓存上一个账号数据的问题? 清除缓存数据:在 onShow 钩子中,我们将 powerStations、list 和 responseRoles 的值重置为初始状态,以清除之前的缓存数据。重新获取数据:…...

数据分析流程中的Lambda架构,以及数据湖基于Hadoop、Spark的实现
文章目录 一、Lambda架构1、Lambda的三层架构2、简单解释:3、Lambda架构的优缺点 二、数据湖基于Hadoop、Spark的实现1、架构2、数据管理(存储层的辅助功能) 一、Lambda架构 1、Lambda的三层架构 Batch View(批处理视图层&#…...
css实现圆环展示百分比,根据值动态展示所占比例
代码如下 <view class""><view class"circle-chart"><view v-if"!!num" class"pie-item" :style"{background: conic-gradient(var(--one-color) 0%,#E9E6F1 ${num}%),}"></view><view v-else …...

关于iview组件中使用 table , 绑定序号分页后序号从1开始的解决方案
问题描述:iview使用table 中type: "index",分页之后 ,索引还是从1开始,试过绑定后台返回数据的id, 这种方法可行,就是后台返回数据的每个页面id都不完全是按照从1开始的升序,因此百度了下,找到了…...
HTML 列表、表格、表单
1 列表标签 作用:布局内容排列整齐的区域 列表分类:无序列表、有序列表、定义列表。 例如: 1.1 无序列表 标签:ul 嵌套 li,ul是无序列表,li是列表条目。 注意事项: ul 标签里面只能包裹 li…...

成都鼎讯硬核科技!雷达目标与干扰模拟器,以卓越性能制胜电磁频谱战
在现代战争中,电磁频谱已成为继陆、海、空、天之后的 “第五维战场”,雷达作为电磁频谱领域的关键装备,其干扰与抗干扰能力的较量,直接影响着战争的胜负走向。由成都鼎讯科技匠心打造的雷达目标与干扰模拟器,凭借数字射…...
多种风格导航菜单 HTML 实现(附源码)
下面我将为您展示 6 种不同风格的导航菜单实现,每种都包含完整 HTML、CSS 和 JavaScript 代码。 1. 简约水平导航栏 <!DOCTYPE html> <html lang"zh-CN"> <head><meta charset"UTF-8"><meta name"viewport&qu…...

爬虫基础学习day2
# 爬虫设计领域 工商:企查查、天眼查短视频:抖音、快手、西瓜 ---> 飞瓜电商:京东、淘宝、聚美优品、亚马逊 ---> 分析店铺经营决策标题、排名航空:抓取所有航空公司价格 ---> 去哪儿自媒体:采集自媒体数据进…...

学习STC51单片机32(芯片为STC89C52RCRC)OLED显示屏2
每日一言 今天的每一份坚持,都是在为未来积攒底气。 案例:OLED显示一个A 这边观察到一个点,怎么雪花了就是都是乱七八糟的占满了屏幕。。 解释 : 如果代码里信号切换太快(比如 SDA 刚变,SCL 立刻变&#…...
基于 TAPD 进行项目管理
起因 自己写了个小工具,仓库用的Github。之前在用markdown进行需求管理,现在随着功能的增加,感觉有点难以管理了,所以用TAPD这个工具进行需求、Bug管理。 操作流程 注册 TAPD,需要提供一个企业名新建一个项目&#…...
与常用工具深度洞察App瓶颈)
iOS性能调优实战:借助克魔(KeyMob)与常用工具深度洞察App瓶颈
在日常iOS开发过程中,性能问题往往是最令人头疼的一类Bug。尤其是在App上线前的压测阶段或是处理用户反馈的高发期,开发者往往需要面对卡顿、崩溃、能耗异常、日志混乱等一系列问题。这些问题表面上看似偶发,但背后往往隐藏着系统资源调度不当…...
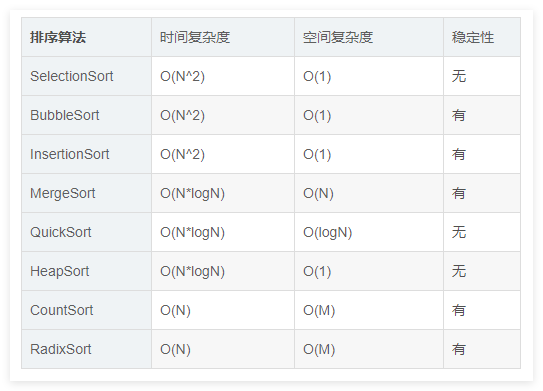
排序算法总结(C++)
目录 一、稳定性二、排序算法选择、冒泡、插入排序归并排序随机快速排序堆排序基数排序计数排序 三、总结 一、稳定性 排序算法的稳定性是指:同样大小的样本 **(同样大小的数据)**在排序之后不会改变原始的相对次序。 稳定性对基础类型对象…...