反向代理模块开发
1 概念
1.1 反向代理概念
-
反向代理是指以代理服务器来接收客户端的请求,然后将请求转发给内部网络上的服务器,将从服务器上得到的结果返回给客户端,此时代理服务器对外表现为一个反向代理服务器。
- 对于客户端来说,反向代理就相当于目标服务器,只需要将反向代理当作目标服务器一样发送请求就可以了,并且客户端不需要进行任何设置。
1.2 特点
-
反向代理是代理服务器,为服务器收发请求,使真实服务器对客户端不可见。
原文链接:https://blog.csdn.net/Dax1_/article/details/124652162
1.3 反向代理场景

-
正向代理:A可以访问B,B可以访问C。如果A要访问C,那么要在B上面部署正向代理模块。
-
反向代理:A可以访问B,C可以访问B,B不能访问A和C;如果A要访问C,可以用反向代理。
完整的反向代理图如下所示:

不适用代理的情况下,外网不能访问企业内网的服务器;如果希望访问企业内网,必须要使用反向代理,如果要使用反向代理,企业必须要有一个公网的服务器,公网的IP。
- 正向代理只有一个模块一个服务程序;
- 而反向代理有两个模块两个服务程序:外网模块和内网模块。
2 反向代理实现
2.1 反向代理基本思路

服务程序启动的时候,内网模块向外网模块发起一个TCP连接,建立一条传输通道(称为命令通道);
之后外网模块读取路由参数配置文件,外网模块需要监听5122,5123,5128三个端口;
用户1连接了外网服务器的5122端口,外网模块通过命令通道告诉内网模块帮我连192.168.168.1.4的22端口;
内网模块向外网模块发起TCP连接,建立一条传输通道,同时内网模块连接192.168.1.4 22,整个链路就建立起来了。
外网模块外网程序:
- 外网模块没有主动的向任何服务器发起连接。
- 外网程序没有为命令通道的socket准备epoll事件(因为命令通道不需要监听,只有外网程序向内网发送命令,内网程序并不会向外网程序发送命令。)。
内网模块内网程序:
- 内网程序非阻塞socket命令通道建立之后,再设置为非阻塞的,加入epoll事件。
- 此时,内网模块与外网模块都进入事件循环,外网程序监听着路由配置文件的端口可以开始接受用户客户端的连接请求了;内网程序epoll中只有命令通道的socket,内网程序也做好了准备接收外网程序的命令。
2.2 框架流程图

2.3 反向代理框架实现
rinetd.cpp外网模块
/** 程序名:rinetd.cpp,反向网络代理服务程序-外网端。* 作者:张咸武
*/
#include "_public.h"
using namespace idc;// 代理路由参数的结构体。
struct st_route
{int srcport; // 源端口。char dstip[31]; // 目标主机的地址。int dstport; // 目标主机的端口。int listensock; // 监听源端口的socket。
}stroute;
vector<struct st_route> vroute; // 代理路由的容器。
bool loadroute(const char *inifile); // 把代理路由参数加载到vroute容器。int initserver(int port); // 初始化服务端的监听端口。int epollfd=0; // epoll的句柄。
int tfd=0; // 定时器的句柄。#define MAXSOCK 1024
int clientsocks[MAXSOCK]; // 存放每个socket连接对端的socket的值。
int clientatime[MAXSOCK]; // 存放每个socket连接最后一次收发报文的时间。
string clientbuffer[MAXSOCK]; // 存放每个socket发送内容的buffer。int cmdlistensock=0; // 命令通道监听的socket。
int cmdconnsock=0; // 命令通道连接的socket。void EXIT(int sig); // 进程退出函数。clogfile logfile;// cpactive pactive; // 进程心跳。int main(int argc,char *argv[])
{if (argc != 4){printf("\n");printf("Using :./rinetd logfile inifile cmdport\n\n");printf("Sample:./rinetd /tmp/rinetd.log /etc/rinetd.conf 5001\n\n");printf(" /project/tools/bin/procctl 5 /project/tools/bin/rinetd /tmp/rinetd.log /etc/rinetd.conf 5001\n\n");printf("logfile 本程序运行的日志文件名。\n");printf("inifile 代理路由参数配置文件。\n");printf("cmdport 与内网代理程序的通讯端口。\n\n");return -1;}// 关闭全部的信号和输入输出。// 设置信号,在shell状态下可用 "kill + 进程号" 正常终止些进程。// 但请不要用 "kill -9 +进程号" 强行终止。closeioandsignal(); signal(SIGINT,EXIT); signal(SIGTERM,EXIT);// 打开日志文件。if (logfile.open(argv[1])==false){printf("打开日志文件失败(%s)。\n",argv[1]); return -1;}// pactive.addpinfo(30,"rinetd"); // 设置进程的心跳超时间为30秒。// 把代理路由参数加载到vroute容器。if (loadroute(argv[2])==false) return -1;logfile.write("加载代理路由参数成功(%d)。\n",vroute.size());// 初始化命令通道的监听端口。if ( (cmdlistensock=initserver(atoi(argv[3]))) < 0 ){ logfile.write("initserver(%s) failed.\n",argv[3]); EXIT(-1);}// 等待内网程序的连接请求,cmdlistensock是阻塞的,并且没有交给epoll。struct sockaddr_in client;socklen_t len = sizeof(client);cmdconnsock = accept(cmdlistensock,(struct sockaddr*)&client,&len);if (cmdconnsock < 0){logfile.write("accept() failed.\n"); EXIT(-1);}logfile.write("与内部的命令通道已建立(cmdconnsock=%d)。\n",cmdconnsock);// 初始化服务端用于监听外网的socket。for (int ii=0;ii<vroute.size();ii++){if ( (vroute[ii].listensock=initserver(vroute[ii].srcport)) < 0 ){logfile.write("initserver(%d) failed.\n",vroute[ii].srcport); EXIT(-1);}// 把监听socket设置成非阻塞。fcntl(vroute[ii].listensock,F_SETFL,fcntl(vroute[ii].listensock,F_GETFD,0)|O_NONBLOCK);}// 创建epoll句柄。epollfd=epoll_create(1);struct epoll_event ev; // 声明事件的数据结构。// 为监听外网的socket准备可读事件。for (int ii=0;ii<vroute.size();ii++){ev.events=EPOLLIN; // 读事件。ev.data.fd=vroute[ii].listensock; epoll_ctl(epollfd,EPOLL_CTL_ADD,vroute[ii].listensock,&ev); // 把监听外网的socket的读事件加入epollfd中。}// 创建定时器。tfd=timerfd_create(CLOCK_MONOTONIC,TFD_NONBLOCK|TFD_CLOEXEC); // 创建timerfd。struct itimerspec timeout;memset(&timeout,0,sizeof(struct itimerspec));timeout.it_value.tv_sec = 20; // 超时时间为20秒。timeout.it_value.tv_nsec = 0;timerfd_settime(tfd,0,&timeout,NULL); // 开始计时。// 为定时器准备事件。ev.events=EPOLLIN; ev.data.fd=tfd;epoll_ctl(epollfd,EPOLL_CTL_ADD,tfd,&ev); // 把定时器的读事件加入epollfd中。struct epoll_event evs[10]; // 存放epoll返回的事件。while (true){// 等待监视的socket有事件发生。int infds=epoll_wait(epollfd,evs,10,-1);// 返回失败。if (infds < 0) { logfile.write("epoll() failed。"); EXIT(-1); }// 遍历epoll返回的已发生事件的数组evs。for (int ii=0;ii<infds;ii++){// 如果定时器的时间已到,有三件事要做:1)更新进程的心跳;2)向命令通道发送心跳报文;3)清理空闲的客户端socket。if (evs[ii].data.fd==tfd){// logfile.write("定时器时间已到。\n");timerfd_settime(tfd,0,&timeout,0); // 重新开始计时。// pactive.uptatime(); // 1)更新进程心跳;// 2)向命令通道发送心跳报文;char buffer[256];strcpy(buffer,"<activetest>");if (send(cmdconnsock,buffer,strlen(buffer),0)<=0){logfile.write("与内网程序的命令通道已断开。\n"); EXIT(-1);}// 3)清理空闲的客户端socket。for (int jj=0;jj<MAXSOCK;jj++){// 如果客户端socket空闲的时间超过80秒就关掉它。if ( (clientsocks[jj]>0) && ((time(0)-clientatime[jj])>80) ){logfile.write("client(%d,%d) timeout。\n",clientsocks[jj],clientsocks[clientsocks[jj]]);close(clientsocks[jj]); close(clientsocks[clientsocks[jj]]);// 把数组中对端的socket置空,这一行代码和下一行代码的顺序不能乱。clientsocks[clientsocks[jj]]=0;// 把数组中本端的socket置空,这一行代码和上一行代码的顺序不能乱。clientsocks[jj]=0;}}continue;}// 如果发生事件的是监听的listensock,表示外网有新的客户端连上来。int jj=0;for (jj=0;jj<vroute.size();jj++){if (evs[ii].data.fd==vroute[jj].listensock){// 从已连接队列中获取一个已准备好的外网客户端的socket。struct sockaddr_in client;socklen_t len = sizeof(client);int srcsock = accept(vroute[jj].listensock,(struct sockaddr*)&client,&len);if (srcsock<0) break;if (srcsock>=MAXSOCK) {logfile.write("连接数已超过最大值%d。\n",MAXSOCK); close(srcsock); break;}// 通过命令通道向内网程序发送命令,把路由参数传给它。char buffer[256];memset(buffer,0,sizeof(buffer));sprintf(buffer,"<dstip>%s</dstip><dstport>%d</dstport>",vroute[jj].dstip,vroute[jj].dstport);if (send(cmdconnsock,buffer,strlen(buffer),0)<=0){logfile.write("与内网的命令通道已断开。\n"); EXIT(-1);}// 接受内网程序的连接,这里的accept()是阻塞的。int dstsock=accept(cmdlistensock,(struct sockaddr*)&client,&len);if (dstsock<0) { close(srcsock); break; }if (dstsock>=MAXSOCK){logfile.write("连接数已超过最大值%d。\n",MAXSOCK); close(srcsock); close(dstsock); break;}// 把内网和外网客户端的socket对接在一起。// 为新连接的两个socket准备可读事件,并添加到epoll中。ev.data.fd=srcsock; ev.events=EPOLLIN;epoll_ctl(epollfd,EPOLL_CTL_ADD,srcsock,&ev);ev.data.fd=dstsock; ev.events=EPOLLIN;epoll_ctl(epollfd,EPOLL_CTL_ADD,dstsock,&ev);// 更新clientsocks数组中两端soccket的值和活动时间。clientsocks[srcsock]=dstsock; clientatime[srcsock]=time(0); clientsocks[dstsock]=srcsock; clientatime[dstsock]=time(0);logfile.write("accept port %d client(%d,%d) ok。\n",vroute[jj].srcport,srcsock,dstsock);break;}}// 如果jj<vroute.size(),表示事件在上面的for循环中已被处理。if (jj<vroute.size()) continue;// 如果是客户端连接的socke有事件,分三种情况:1)客户端有报文发过来;2)客户端连接已断开;3)有数据要发给客户端。// 如果从通道一端的socket读取到了数据,把数据存放在对端socket的缓冲区中。// if (evs[ii].events==EPOLLIN) // 不要这么写,有读事件是1,有写事件是4,如果读和写都有,是5。if (evs[ii].events&EPOLLIN) // 判断是否为读事件。 {char buffer[5000]; // 存放从接收缓冲区中读取的数据。int buflen=0; // 从接收缓冲区中读取的数据的大小。// 从通道的一端读取数据。if ( (buflen=recv(evs[ii].data.fd,buffer,sizeof(buffer),0)) <= 0 ){// 如果连接已断开,需要关闭通道两端的socket。logfile.write("client(%d,%d) disconnected。\n",evs[ii].data.fd,clientsocks[evs[ii].data.fd]);close(evs[ii].data.fd); // 关闭客户端的连接。close(clientsocks[evs[ii].data.fd]); // 关闭客户端对端的连接。clientsocks[clientsocks[evs[ii].data.fd]]=0; // 把数组中对端的socket置空,这一行代码和下一行代码的顺序不能乱。clientsocks[evs[ii].data.fd]=0; // 把数组中本端的socket置空,这一行代码和上一行代码的顺序不能乱。continue;}// 成功的读取到了数据,把接收到的报文内容原封不动的发给通道的对端。// logfile.write("from %d to %d,%d bytes。\n",evs[ii].data.fd,clientsocks[evs[ii].data.fd],buflen);// send(clientsocks[evs[ii].data.fd],buffer,buflen,0);logfile.write("from %d,%d bytes\n",evs[ii].data.fd,buflen);// 把读取到的数据追加到对端socket的buffer中。clientbuffer[clientsocks[evs[ii].data.fd]].append(buffer,buflen);// 修改对端socket的事件,增加写事件。ev.data.fd=clientsocks[evs[ii].data.fd];ev.events=EPOLLIN|EPOLLOUT;epoll_ctl(epollfd,EPOLL_CTL_MOD,ev.data.fd,&ev);// 更新通道两端socket的活动时间。clientatime[evs[ii].data.fd]=time(0); clientatime[clientsocks[evs[ii].data.fd]]=time(0); }// 判断客户端的socket是否有写事件(发送缓冲区没有满)。if (evs[ii].events&EPOLLOUT){// 把socket缓冲区中的数据发送出去。int writen=send(evs[ii].data.fd,clientbuffer[evs[ii].data.fd].data(),clientbuffer[evs[ii].data.fd].length(),0);// 以下代码模拟不能一次发完全部数据的场景。//int ilen;//if (clientbuffer[evs[ii].data.fd].length()>10) ilen=10;//else ilen=clientbuffer[evs[ii].data.fd].length();//int writen=send(evs[ii].data.fd,clientbuffer[evs[ii].data.fd].data(),ilen,0);logfile.write("to %d,%d bytes\n",evs[ii].data.fd,writen);// 删除socket缓冲区中已成功发送的数据。clientbuffer[evs[ii].data.fd].erase(0,writen);// 如果socket缓冲区中没有数据了,不再关心socket的写件事。if (clientbuffer[evs[ii].data.fd].length()==0){ev.data.fd=evs[ii].data.fd;ev.events=EPOLLIN;epoll_ctl(epollfd,EPOLL_CTL_MOD,ev.data.fd,&ev);}}}}return 0;
}// 初始化服务端的监听端口。
int initserver(const int port)
{int sock = socket(AF_INET,SOCK_STREAM,0);if (sock < 0){logfile.write("socket(%d) failed.\n",port); return -1;}int opt = 1; unsigned int len = sizeof(opt);setsockopt(sock,SOL_SOCKET,SO_REUSEADDR,&opt,len);struct sockaddr_in servaddr;servaddr.sin_family = AF_INET;servaddr.sin_addr.s_addr = htonl(INADDR_ANY);servaddr.sin_port = htons(port);if (bind(sock,(struct sockaddr *)&servaddr,sizeof(servaddr)) < 0 ){logfile.write("bind(%d) failed.\n",port); close(sock); return -1;}if (listen(sock,5) != 0 ){logfile.write("listen(%d) failed.\n",port); close(sock); return -1;}return sock;
}// 把代理路由参数加载到vroute容器。
bool loadroute(const char *inifile)
{cifile ifile;if (ifile.open(inifile)==false){logfile.write("打开代理路由参数文件(%s)失败。\n",inifile); return false;}string strbuffer;ccmdstr cmdstr;while (true){if (ifile.readline(strbuffer)==false) break;// 删除说明文字,#后面的部分。auto pos=strbuffer.find("#");if (pos!=string::npos) strbuffer.resize(pos);replacestr(strbuffer," "," ",true); // 把两个空格替换成一个空格,注意第四个参数。deletelrchr(strbuffer,' '); // 删除两边的空格。// 拆分参数。cmdstr.splittocmd(strbuffer," ");if (cmdstr.size()!=3) continue;memset(&stroute,0,sizeof(struct st_route));cmdstr.getvalue(0,stroute.srcport); // 源端口。cmdstr.getvalue(1,stroute.dstip); // 目标地址。cmdstr.getvalue(2,stroute.dstport); // 目标端口。vroute.push_back(stroute);}return true;
}void EXIT(int sig)
{logfile.write("程序退出,sig=%d。\n\n",sig);// 关闭监听内网程序的socket。close(cmdlistensock);// 关闭内网程序与服务端的命令通道。close(cmdconnsock);// 关闭全部监听的socket。for (auto &aa:vroute)if (aa.listensock>0) close(aa.listensock);// 关闭全部客户端的socket。for (auto aa:clientsocks)if (aa>0) close(aa);close(epollfd); // 关闭epoll。close(tfd); // 关闭定时器。exit(0);
}rinetdin.cpp代码:
/** 程序名:rinetdin.cpp,反向网络代理服务程序-内网端。* 作者:张咸武
*/
#include "_public.h"
using namespace idc;int cmdconnsock; // 内网程序与外网程序的命令通道的socket。int epollfd=0; // epoll的句柄。
int tfd=0; // 定时器的句柄。#define MAXSOCK 1024
int clientsocks[MAXSOCK]; // 存放每个socket连接对端的socket的值。
int clientatime[MAXSOCK]; // 存放每个socket连接最后一次收发报文的时间。
string clientbuffer[MAXSOCK]; // 存放每个socket发送内容的buffer。// 向目标ip和端口发起socket连接,bio取值:false-非阻塞io,true-阻塞io。
int conntodst(const char *ip,const int port,bool bio=false);void EXIT(int sig); // 进程退出函数。clogfile logfile;// cpactive pactive; // 进程心跳。int main(int argc,char *argv[])
{if (argc != 4){printf("\n");printf("Using :./rinetdin logfile ip port\n\n");printf("Sample:./rinetdin /tmp/rinetdin.log 192.168.192.136 5001\n\n");printf(" /project/tools/bin/procctl 5 /project/tools/bin/rinetdin /tmp/rinetdin.log 192.168.150.128 5001\n\n");printf("logfile 本程序运行的日志文件名。\n");printf("ip 外网代理程序的ip地址。\n");printf("port 外网代理程序的通讯端口。\n\n\n");return -1;}// 关闭全部的信号和输入输出。// 设置信号,在shell状态下可用 "kill + 进程号" 正常终止些进程。// 但请不要用 "kill -9 +进程号" 强行终止。closeioandsignal(); signal(SIGINT,EXIT); signal(SIGTERM,EXIT);// 打开日志文件。if (logfile.open(argv[1])==false){printf("打开日志文件失败(%s)。\n",argv[1]); return -1;}// pactive.addpInfo(30,"inetd"); // 设置进程的心跳超时间为30秒。// 建立与外网程序的命令通道,采用阻塞的socket。if ((cmdconnsock=conntodst(argv[2],atoi(argv[3]),true))<0){logfile.write("tcpclient.connect(%s,%s) 失败。\n",argv[2],argv[3]); return -1;}logfile.write("与外部的命令通道已建立(cmdconnsock=%d)。\n",cmdconnsock);// 命令通道建立之后,再设置为非阻塞的。fcntl(cmdconnsock,F_SETFL,fcntl(cmdconnsock,F_GETFD,0)|O_NONBLOCK);// 创建epoll句柄。epollfd=epoll_create(1);struct epoll_event ev; // 声明事件的数据结构。// 为命令通道的socket准备可读事件。ev.events=EPOLLIN;ev.data.fd=cmdconnsock;epoll_ctl(epollfd,EPOLL_CTL_ADD,cmdconnsock,&ev);// 创建定时器。tfd=timerfd_create(CLOCK_MONOTONIC,TFD_NONBLOCK|TFD_CLOEXEC); // 创建timerfd。struct itimerspec timeout;memset(&timeout,0,sizeof(struct itimerspec));timeout.it_value.tv_sec = 20; // 超时时间为20秒。timeout.it_value.tv_nsec = 0;timerfd_settime(tfd,0,&timeout,0); // 开始计时。// 为定时器准备事件。ev.events=EPOLLIN; ev.data.fd=tfd;epoll_ctl(epollfd,EPOLL_CTL_ADD,tfd,&ev); // 把定时器的读事件加入epollfd中。// pactive.addpinfo(30,"rinetdin"); // 设置进程的心跳超时间为30秒。struct epoll_event evs[10]; // 存放epoll返回的事件。while (true){// 等待监视的socket有事件发生。int infds=epoll_wait(epollfd,evs,10,-1);// 返回失败。if (infds < 0) { logfile.write("epoll() failed。\n"); EXIT(-1); }// 遍历epoll返回的已发生事件的数组evs。for (int ii=0;ii<infds;ii++){// 如果定时器的时间已到,有两件事要做:1)设置进程的心跳;2)清理空闲的客户端socket。if (evs[ii].data.fd==tfd){// logfile.write("定时器时间已到。\n");timerfd_settime(tfd,0,&timeout,NULL); // 重新开始计时。// pactive.uptatime(); // 1)更新进程心跳。// 2)清理空闲的客户端socket。for (int jj=0;jj<MAXSOCK;jj++){// 如果客户端socket空闲的时间超过80秒就关掉它。if ( (clientsocks[jj]>0) && ((time(0)-clientatime[jj])>80) ){logfile.write("client(%d,%d) timeout。\n",clientsocks[jj],clientsocks[clientsocks[jj]]);close(clientsocks[jj]); close(clientsocks[clientsocks[jj]]);clientsocks[clientsocks[jj]]=0; // 把数组中对端的socket置空,这一行代码和下一行代码的顺序不能乱。clientsocks[jj]=0; // 把数组中本端的socket置空,这一行代码和上一行代码的顺序不能乱。}}continue;}// 如果发生事件的是命令通道。if (evs[ii].data.fd==cmdconnsock){// 读取命令通道socket报文内容。char buffer[256];memset(buffer,0,sizeof(buffer));if (recv(cmdconnsock,buffer,sizeof(buffer),0)<=0){logfile.write("与外网的命令通道已断开。\n"); EXIT(-1);}// 如果收到的是心跳报文。if (strcmp(buffer,"<activetest>")==0) continue;// 如果收到的是新建连接的命令。// 向外网服务端发起连接请求。int srcsock=conntodst(argv[2],atoi(argv[3]));if (srcsock<0) continue;if (srcsock>=MAXSOCK){logfile.write("连接数已超过最大值%d。\n",MAXSOCK); close(srcsock); continue;}// 从命令报文内容中获取目标服务器的地址和端口。char dstip[11];int dstport;getxmlbuffer(buffer,"dstip",dstip,30);getxmlbuffer(buffer,"dstport",dstport);// 向目标服务器的地址和端口发起socket连接。int dstsock=conntodst(dstip,dstport);if (dstsock<0) { close(srcsock); continue; }if (dstsock>=MAXSOCK){ logfile.write("连接数已超过最大值%d。\n",MAXSOCK); close(srcsock); close(dstsock); continue;} // 把内网和外网的socket对接在一起。logfile.write("新建内外网通道(%d,%d) ok。\n",srcsock,dstsock);// 为新连接的两个socket准备可读事件,并添加到epoll中。ev.data.fd=srcsock; ev.events=EPOLLIN;epoll_ctl(epollfd,EPOLL_CTL_ADD,srcsock,&ev);ev.data.fd=dstsock; ev.events=EPOLLIN;epoll_ctl(epollfd,EPOLL_CTL_ADD,dstsock,&ev);// 更新clientsocks数组中两端soccket的值和活动时间。clientsocks[srcsock]=dstsock; clientsocks[dstsock]=srcsock;clientatime[srcsock]=time(0); clientatime[dstsock]=time(0);continue;}// 如果是客户端连接的socke有事件,分三种情况:1)客户端有报文发过来;2)客户端连接已断开;3)有数据要发给客户端。// 如果从通道一端的socket读取到了数据,把数据存放在对端socket的缓冲区中。// if (evs[ii].events==EPOLLIN) // 不要这么写,有读事件是1,有写事件是4,如果读和写都有,是5。if (evs[ii].events&EPOLLIN) // 判断是否为读事件。 {char buffer[5000]; // 存放从接收缓冲区中读取的数据。int buflen=0; // 从接收缓冲区中读取的数据的大小。// 从通道的一端读取数据。if ( (buflen=recv(evs[ii].data.fd,buffer,sizeof(buffer),0)) <= 0 ){// 如果连接已断开,需要关闭通道两端的socket。logfile.write("client(%d,%d) disconnected。\n",evs[ii].data.fd,clientsocks[evs[ii].data.fd]);close(evs[ii].data.fd); // 关闭客户端的连接。close(clientsocks[evs[ii].data.fd]); // 关闭客户端对端的连接。clientsocks[clientsocks[evs[ii].data.fd]]=0; // 把数组中对端的socket置空,这一行代码和下一行代码的顺序不能乱。clientsocks[evs[ii].data.fd]=0; // 把数组中本端的socket置空,这一行代码和上一行代码的顺序不能乱。continue;}// 成功的读取到了数据,把接收到的报文内容原封不动的发给通道的对端。// logfile.write("from %d to %d,%d bytes。\n",evs[ii].data.fd,clientsocks[evs[ii].data.fd],buflen);// send(clientsocks[evs[ii].data.fd],buffer,buflen,0);logfile.write("from %d,%d bytes\n",evs[ii].data.fd,buflen);// 把读取到的数据追加到对端socket的buffer中。clientbuffer[clientsocks[evs[ii].data.fd]].append(buffer,buflen);// 修改对端socket的事件,增加写事件。ev.data.fd=clientsocks[evs[ii].data.fd];ev.events=EPOLLIN|EPOLLOUT;epoll_ctl(epollfd,EPOLL_CTL_MOD,ev.data.fd,&ev);// 更新通道两端socket的活动时间。clientatime[evs[ii].data.fd]=time(0); clientatime[clientsocks[evs[ii].data.fd]]=time(0); }// 判断客户端的socket是否有写事件(发送缓冲区没有满)。if (evs[ii].events&EPOLLOUT){// 把socket缓冲区中的数据发送出去。int writen=send(evs[ii].data.fd,clientbuffer[evs[ii].data.fd].data(),clientbuffer[evs[ii].data.fd].length(),0);// 以下代码模拟不能一次发完全部数据的场景。//int ilen;//if (clientbuffer[evs[ii].data.fd].length()>10) ilen=10;//else ilen=clientbuffer[evs[ii].data.fd].length();//int writen=send(evs[ii].data.fd,clientbuffer[evs[ii].data.fd].data(),ilen,0);logfile.write("to %d,%d bytes\n",evs[ii].data.fd,writen);// 删除socket缓冲区中已成功发送的数据。clientbuffer[evs[ii].data.fd].erase(0,writen);// 如果socket缓冲区中没有数据了,不再关心socket的写件事。if (clientbuffer[evs[ii].data.fd].length()==0){ev.data.fd=evs[ii].data.fd;ev.events=EPOLLIN;epoll_ctl(epollfd,EPOLL_CTL_MOD,ev.data.fd,&ev);}}}}return 0;
}// 向目标地址和端口发起socket连接。
int conntodst(const char *ip,const int port,bool bio)
{// 第1步:创建客户端的socket。int sockfd;if ( (sockfd = socket(AF_INET,SOCK_STREAM,0))==-1) return -1; // 第2步:向服务器发起连接请求。struct hostent* h;if ( (h = gethostbyname(ip)) == 0 ) { close(sockfd); return -1; }struct sockaddr_in servaddr;memset(&servaddr,0,sizeof(servaddr));servaddr.sin_family = AF_INET;servaddr.sin_port = htons(port); // 指定服务端的通讯端口。memcpy(&servaddr.sin_addr,h->h_addr,h->h_length);// 把socket设置为非阻塞。if (bio==false) fcntl(sockfd,F_SETFL,fcntl(sockfd,F_GETFD,0)|O_NONBLOCK);if (connect(sockfd, (struct sockaddr *)&servaddr,sizeof(servaddr))<0){if (errno!=EINPROGRESS){logfile.write("connect(%s,%d) failed.\n",ip,port); return -1;}}return sockfd;
}void EXIT(int sig)
{logfile.write("程序退出,sig=%d。\n\n",sig);// 关闭内网程序与外网程序的命令通道。close(cmdconnsock);// 关闭全部客户端的socket。for (auto aa:clientsocks)if (aa>0) close(aa);close(epollfd); // 关闭epoll。close(tfd); // 关闭定时器。exit(0);
}
相关文章:
反向代理模块开发
1 概念 1.1 反向代理概念 反向代理是指以代理服务器来接收客户端的请求,然后将请求转发给内部网络上的服务器,将从服务器上得到的结果返回给客户端,此时代理服务器对外表现为一个反向代理服务器。 对于客户端来说,反向代理就相当于…...
海康面阵、线阵、读码器及3D相机接线说明
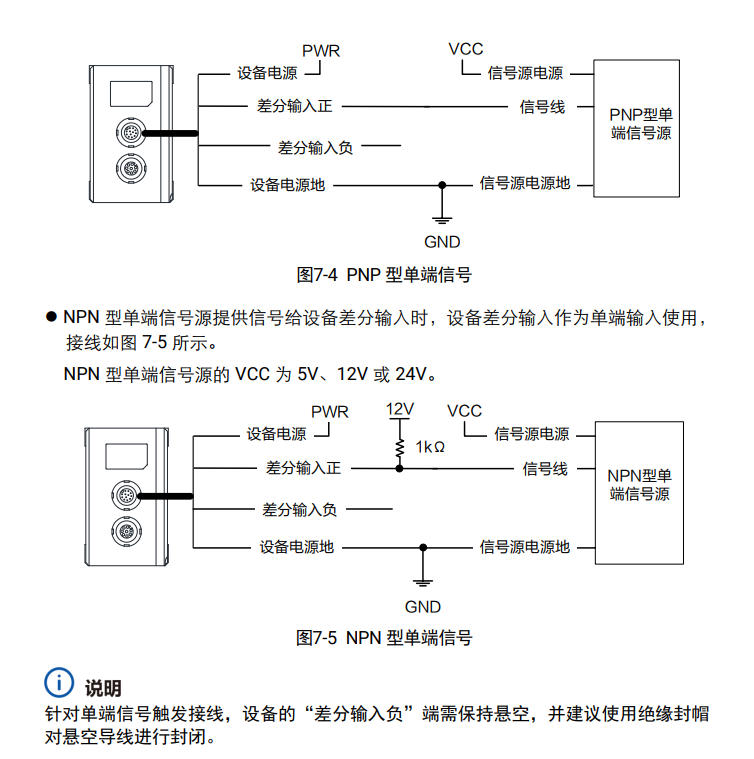
为帮助用户快速了解和配置海康系列设备的接线方式,本文将针对海康面阵相机、线阵相机、读码器和3D相机的主要接口及接线方法进行全面整理和说明。 一、海康面阵相机接线说明 海康面阵相机使用6-pin P7接口,其功能设计包括电源输入、光耦隔离信号输入输出…...

AI与ArcGIS Pro的地理空间分析和可视化
AI思维已经成为一种必备的能力,ArcGIS Pro3的卓越性能与ChatGPT的智能交互相结合,将会为您打造了一个全新的工作流程! 那么如何将火热的ChatGPT与ArcGIS Pro3相结合,使我们无需自己进行复杂的编程,通过强大的ChatGPT辅助我们完成地…...

详解HTML5语言
文章目录 前言任务一 认识HTML5任务描述:知识一 HTML5基础知识 任务二 HTML 5语义元素任务描述:知识一 HTML5新增结构元素知识二 HTML5文本语义元素 总结 前言 HTML5是一个新的网络标准,现在仍处于发展阶段。目标是取代现有的HTML 4.01和XHT…...

docker compose一键启动ES集群和kibana
集群启用了XPACK后,只有第一次可以启动成功。要是宕机了。就启动不了了。(除非删除data目录所有数据)生产环境 启用了后 建议配置 自定义证书。 services:es01:image: "docker.elastic.co/elasticsearch/elasticsearch:7.17.25"co…...

遗传算法与深度学习实战(25)——使用Keras构建卷积神经网络
遗传算法与深度学习实战(25)——使用Keras构建卷积神经网络 0. 前言1. 卷积神经网络基本概念1.1 卷积1.2 步幅1.3 填充1.4 激活函数1.5 池化 2. 使用 Keras 构建卷积神经网络3. CNN 层的问题4. 模型泛化小结系列链接 0. 前言 卷积神经网络 (Convolution…...

pytest+allure生成报告显示loading和404
pytestallure执行测试脚本后,通常会在电脑的磁盘上建立一个临时文件夹,里面存放allure测试报告,但是这个测试报告index.html文件单独去打开,却显示loading和404, 这个时候就要用一些办法来解决这个报告显示的问题了。 用命令产生…...

为何划分 Vue 项目结构组件?划分结构和组件解决了什么问题?为什么要这么做?
在一个大型 Vue 项目中,合理的目录结构和组件划分至关重要。良好的结构可以提高开发效率,减少维护成本,并使得团队合作更加顺畅。下面我将详细讲解如何在 Vue 项目中进行目录结构和组件划分,并结合实际项目代码示例进行说明。 1. 为什么要划分结构和组件? 1.1 提高可维护…...

springboot中使用mongodb完成评论功能
pom文件中引入 <!-- mongodb --> <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-data-mongodb</artifactId> </dependency> yml中配置连接 data:mongodb:uri: mongodb://admin:1234561…...

Dubbo的RPC泛化调用
目录 一、RPC泛化调用的应用场景 二、Dubbo RPC泛化调用的实现原理 三、Dubbo RPC泛化调用的实现步骤 四、示例代码 五、泛化调用怎么发现提供该接口的服务及服务的IP和端口? Dubbo的RPC泛化调用是一种在调用方没有服务方提供的API的情况下,对服务方…...

【k8s深入理解之 Scheme】全面理解 Scheme 的注册机制、内外部版本、自动转换函数、默认填充函数、Options等机制
参考 【k8s基础篇】k8s scheme3 之序列化_基于schema进行序列化-CSDN博客【k8s基础篇】k8s scheme4 之资源数据结构与资源注册_kubernetes 的scheam-CSDN博客常见问题答疑 【k8s深入理解之 Scheme 补充-1】理解 Scheme 中资源的注册以及 GVK 和 go 结构体的映射-CSDN博客【k8s深…...

接口性能优化宝典:解决性能瓶颈的策略与实践
目录 一、直面索引 (一)索引优化的常见场景 (二)如何检查索引的使用情况 (三)如何避免索引失效 (四)强制选择索引 二、提升 SQL 执行效率 (一)避免不必…...

雨晨 Windows Server 2025 数据中心 极简 26311.5000
文件: 雨晨 Windows Server 2025 数据中心 极简 26311.5000 install.esd 大小: 1740910278 字节 修改时间: 2024年11月29日, 星期五, 19:00:20 MD5: 5B946B9DED569E04917E804B25A0F736 SHA1: E78BB430B3E0397F6ACFEB821CF85EA7CFB5A00F CRC32: B3F76BD7 常规制作旨在测试YCDIS…...

关于IDE的相关知识之三【插件安装、配置及推荐的意义】
成长路上不孤单😊😊😊😊😊😊 【14后😊///C爱好者😊///持续分享所学😊///如有需要欢迎收藏转发///😊】 今日分享关于ide插件安装、配置及推荐意义的相关内容…...

JSP+Servlet实现列表分页功能
分享一种最简单的JSPServlet实现分页的方式! 旧:无分页功能的查询列表功能,仅供参考! Servlet try {Connection conn null;PreparedStatement ps null;ResultSet rs null;List<Dept> arrayList null;conn DBUtil.get…...

操作系统存储器相关习题
1 为什么要配置层次式存储器? 设置多个存储器可以使存储器两端的硬件能并行工作; 采用多级存储系统特别是Cache技术,是减轻存储器带宽对系统性能影响的最佳结构方案; 在微处理机内部设置各种缓冲存储器,减轻对存储器存取的压力。…...

QUICK 调试camera-xml解析
本文主要介绍如何在QUICK QCS6490使能相机模组。QCS6490的相机基于CameraX的框架,只需通过配置XML文件,设置相机模组的相关参数,就可以点亮相机。本文主要介绍Camera Sensor Module XML和Camera Sensor XML配置的解析,这中间需要c…...

【linux】shell脚本编写基础
shell 脚本关键字: 1、变量定义:前后不能空格 输入: zhao"Joe" echo ${zhao} echo "I am ${zhao}" 输出: yuxin I am Joe2、echo 输出 输入: echo "123" 输出: 1233、readonly 定义变…...

STM32 外设简介
STM32 外设简介 STM32 是由意法半导体 (STMicroelectronics) 开发的一系列基于 ARM Cortex 内核的微控制器,广泛应用于嵌入式系统中。STM32 系列的一个重要特点是其丰富而强大的外设模块,支持多种接口和功能,能满足工业控制、物联网、消费电…...

Django-Vue3-Admin - 现代化的前后端分离权限管理系统
项目介绍 Django-Vue3-Admin是一个基于RBAC(Role-Based Access Control)模型的综合性基础开发平台,专注于权限控制,支持列级别的细粒度权限管理。该项目采用前后端分离架构,技术栈包括: 后端: Django Django REST …...

Java JVM 面试题详解:JVM运行原理、内存模型、堆栈方法区、GC垃圾回收、JIT编译、类加载机制与线上调优全攻略
1. JVM 到底是什么?为什么 Java 程序离不开它?JVM,全称 Java Virtual Machine,可以理解为 Java 字节码的运行平台。Java 代码先被 javac 编译成 class 字节码,再由 JVM 负责加载、解释、编译、执行和管理内存。这样 Ja…...

避坑指南:CubeMX配置STM32F429三重ADC时,ADC2/3的DMA请求为啥点不了?附手动开启代码
STM32F429三重ADC配置疑难解析:当CubeMX无法启用ADC2/3的DMA请求时如何手动突破限制 在嵌入式开发中,STM32系列微控制器因其丰富的外设资源而备受青睐,其中ADC(模数转换器)模块的性能直接影响信号采集系统的精度与速度…...
)
告别卡顿!用WebRTC-Streamer在浏览器里丝滑播放海康/大华监控(附完整代码)
告别卡顿!用WebRTC-Streamer在浏览器里丝滑播放海康/大华监控(附完整代码) 监控视频的实时查看一直是许多开发者和运维人员头疼的问题。传统的解决方案如Flash早已被淘汰,而基于FLV.js的方案又常常面临延迟高、卡顿、标签页切换暂…...

共享麻将室无人化运营:技术架构、硬件选型与实战避坑指南
1. 项目概述:当传统棋牌室遇上“无人化”浪潮最近几年,如果你留意过城市里的商业形态,会发现一个挺有意思的现象:那些曾经需要前台、服务员、保洁阿姨的传统棋牌室,特别是麻将馆,正在悄然“变身”。它们门口…...

MoocDownloader:三步轻松下载中国大学MOOC课程,实现离线学习自由
MoocDownloader:三步轻松下载中国大学MOOC课程,实现离线学习自由 【免费下载链接】MoocDownloader An MOOC downloader implemented by .NET. 一枚由 .NET 实现的 MOOC 下载器. 项目地址: https://gitcode.com/gh_mirrors/mo/MoocDownloader 你是…...

SharpCompress实战:一个方法搞定C#里ZIP压缩打包,附赠RAR/7Z解压和TAR.GZ创建教程
C#压缩解压全能手册:用SharpCompress玩转ZIP/RAR/7Z/TAR.GZ 在开发日志管理系统、文件上传模块或数据备份工具时,文件压缩解压功能就像空气一样不可或缺。但面对ZIP、RAR、7Z、TAR.GZ这些格式各异的压缩包,不少开发者都会陷入API选择的困境。…...

告别Hello World:用Scala REPL在Ubuntu上实战计算级数,附完整代码与权限避坑
从Hello World到实战:用Scala REPL在Ubuntu上高效计算级数 当Java开发者第一次接触Scala时,往往会被其函数式编程范式和简洁语法所吸引。但真正要将其应用于实际问题解决时,却常因环境配置和实战经验不足而却步。本文将带你跳过传统语法学习阶…...
的抗血管生成效应:对Wnt/β-catenin通路的洞察)
抗IL-3R-α阻断抗体处理的肿瘤来源内皮细胞外泌体(EVs)的抗血管生成效应:对Wnt/β-catenin通路的洞察
引言血管生成,即从已有血管中形成新血管的过程,是肿瘤生长和转移的关键过程。肿瘤微环境中的促血管生成因子在促进这一过程中起着关键作用。在这些因子中,具有促血管生成特性的细胞因子白细胞介素-3(IL-3)由乳腺癌和卵…...
)
计算机毕业设计Python深度学习面向农户的农业知识问答机器人 大数据毕业设计(源码+LW+PPT+讲解)
温馨提示:本人主页置顶文章(点我)开头有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:本人主页置顶文章(点我)开头有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:本人主页置顶文章(点我)开头有 CSDN 平台…...

对比直接使用官方API通过聚合平台管理网站AI调用的体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用官方API与通过聚合平台管理网站AI调用的体验 作为一名网站开发者,在项目中集成大模型能力已成为常态。早期…...