目标检测,图像分割,超分辨率重建
目标检测和图像分割
目标检测和图像分割是计算机视觉中的两个不同任务,它们的输出形式也有所不同。下面我将分别介绍这两个任务的输出。图像分割又可以分为:语义分割、实例分割、全景分割。
-
语义分割(Semantic Segmentation):语义分割的目标是对图像中的每个像素打上类别标签,区分图像中不同类别的对象,但不区分同一类别中的不同个体。例如,在城市街景中,所有的树木都会被标记为“树”这一类别,而不会区分具体的每一棵树。
-
实例分割(Instance Segmentation):实例分割不仅要将每个像素归类到某个类别,还要区分同类中的不同个体。这意味着,在同一图像中,不同车辆会被识别并分别标记,每辆车都有一个独特的实例ID。
-
全景分割(Panoptic Segmentation):全景分割是语义分割和实例分割的结合。它对图像中的每个像素进行分类,同时区分出不同的实例。全景分割既包括了对物体的识别(如语义分割),也包括了对物体具体实例的区分(如实例分割),适用于需要同时识别和区分图像中所有对象的场景。
输出
目标检测任务的输出通常包括以下内容:
-
边界框(Bounding Boxes):对于图像中的每个目标,检测模型会输出一个或多个边界框,这些边界框以坐标形式表示目标的位置。常见的坐标格式有:
- (x_min, y_min, x_max, y_max):表示边界框左上角和右下角的坐标。
- (x_center, y_center, width, height):表示边界框中心点的坐标以及边界框的宽度和高度。
-
类别标签(Class Labels):每个边界框还会伴随一个类别标签,表示框内目标的类别。例如,在COCO数据集中,类别标签可以是“人”、“汽车”、“猫”等。
-
置信度(Confidence Scores):除了类别标签,模型还会为每个边界框输出一个置信度分数,表示模型对检测结果的确定程度。这个分数通常是一个介于0到1之间的值。
-
额外信息:在某些情况下,目标检测模型还可能输出额外信息,如目标的姿态、动作或其他属性。
图像分割任务的输出通常包括以下内容:
-
分割图(Segmentation Masks):图像分割模型会输出一个与输入图像大小相同的二维数组(对于灰度图像)或三维数组(对于彩色图像),每个像素的值表示该像素所属的类别或实例。例如,在语义分割中,不同的类别会有不同的标签;在实例分割中,每个实例会有一个唯一的标识符。
-
类别标签(Class Labels):在语义分割中,每个像素的值通常对应一个类别标签。在实例分割中,除了类别标签,每个实例还会有一个唯一的标识符。
-
概率图(Probability Maps):在某些分割模型中,输出可能包括一个概率图,表示每个像素属于每个类别的概率。
-
边界(Boundaries):在某些高级的分割任务中,模型还可能输出目标的边界信息,如轮廓或边缘。
-
全景分割(Panoptic Segmentation):全景分割结合了语义分割和实例分割的特点,输出既包括每个像素的类别信息,也包括每个实例的标识符。
end: 目标检测和图像分割的输出形式多样,具体取决于任务的性质和应用场景。这些输出可以用于进一步的分析、处理或作为其他计算机视觉任务的输入。
原理
目标检测是指在图像中识别和定位感兴趣的目标(物体)。它不仅要识别出图像中的目标类别,还要确定目标的位置,通常通过绘制边界框(bounding box)来表示。目标检测的基本原理包括以下几个步骤:
-
特征提取:使用卷积神经网络(CNN)从图像中提取特征。这些特征能够捕捉到图像中的局部和全局信息。
-
区域建议网络(Region Proposal Network, RPN):在某些模型中,如Faster R-CNN,使用RPN来快速生成可能包含目标的区域建议。
-
分类和边界框回归:对于每个区域建议,网络需要预测它是否包含目标以及目标的具体类别,同时还要调整边界框的位置,使其更准确地包围目标。
-
非极大值抑制(Non-Maximum Suppression, NMS):由于多个区域建议可能会重叠,NMS用于合并重叠的边界框,以确保每个目标只被检测一次。
-
损失函数:常用的损失函数包括交叉熵损失(用于分类)和Smooth L1损失(用于边界框回归)。Focal Loss是另一种损失函数,专门设计来解决类别不平衡问题。
图像分割是指将图像划分为多个部分或区域,每个区域包含具有相同属性的像素点。图像分割可以分为语义分割、实例分割和全景分割等。图像分割的基本原理包括:
-
像素级分类:图像分割需要对图像中的每个像素进行分类,确定它属于哪个目标或背景。
-
特征提取:与目标检测类似,图像分割也使用CNN来提取图像特征。
-
编码器-解码器架构:许多分割模型采用编码器-解码器结构,其中编码器逐步降低空间维度并提取特征,解码器则逐步恢复空间维度并进行像素级分类。
-
跳跃连接(Skip Connections):为了恢复细节信息,跳跃连接将编码器中的高分辨率特征与解码器中的对应层连接起来。
-
上下文信息:全局上下文信息对于分割非常重要,它可以帮助模型理解图像的整体结构和内容。
-
损失函数:图像分割常用的损失函数包括交叉熵损失和Dice损失,它们衡量预测分割图和真实分割图之间的差异。
-
后处理:在某些情况下,可能需要后处理步骤,如形态学操作或条件随机场(CRF),以改进分割结果。
目标检测和图像分割都是复杂的问题,涉及到深度学习、特征提取和像素级预测等多个方面。随着技术的发展,这些领域的研究不断深入,新的方法和模型也在不断涌现。
异同
相同点:
-
特征提取:两者都依赖于深度学习模型,尤其是卷积神经网络(CNN,transformer等),从图像中提取特征。
-
像素级分析:无论是目标检测还是图像分割,都需要对图像中的每个像素进行分析,以确定它们属于哪个类别或目标。
-
深度学习架构:两者都可以使用类似的深度学习架构,如R-CNN系列、YOLO、SSD等。
-
数据集:两者经常使用相同的数据集进行训练和评估,例如PASCAL VOC、COCO等。
-
应用场景:两者都广泛应用于自动驾驶、监控、医疗影像分析等领域。
不同点:
-
输出结果:
- 目标检测:输出图像中每个目标的类别和位置(通常是边界框),以及每个目标的置信度。
- 图像分割:输出每个像素的类别标签,即对图像中的每个像素进行分类,区分属于不同目标或背景的像素。
-
任务复杂度:
- 目标检测:通常只需要识别和定位目标,不需要区分目标内部的像素。
- 图像分割:需要对图像中的每个像素进行分类,任务更为复杂,尤其是在处理细粒度结构和目标边界时。
-
目标识别:
- 目标检测:关注的是目标的识别和定位,不区分目标内部的像素。
- 图像分割:不仅识别目标,还区分目标内部的像素,提供更详细的目标形状和结构信息。
-
实例区分:
- 目标检测:通常不区分相同类别的不同实例,除非使用实例分割模型。
- 图像分割:在实例分割任务中,需要区分相同类别的不同实例,为每个实例分配唯一的标识符。
-
性能指标:
- 目标检测:常用的性能指标包括平均精度(AP)、精确率-召回率曲线(PR Curve)等。
- 图像分割:常用的性能指标包括交并比(IoU)、Dice系数、像素准确率等。
-
计算资源和速度:
- 目标检测:通常需要较少的计算资源,可以更快地处理图像。
- 图像分割:由于需要对每个像素进行分类,通常需要更多的计算资源和时间。
总的来说,目标检测和图像分割虽然在技术实现上有相似之处,但它们的应用目标和输出结果有明显区别。目标检测更侧重于识别和定位目标,而图像分割则提供了更细致的像素级信息。
评价指标
| 指标名称 | 定义 | 原理 | 使用场景 | 取值范围 |
|---|---|---|---|---|
| AP (Average Precision) | 平均精度,用于衡量精度和召回率的综合能力。 | 通过计算精度-召回曲线下的面积来得到。常常结合多个IoU阈值(如0.5, 0.75)来综合评估。 | 目标检测任务,综合考虑精度和召回率,评估模型的整体性能。 | [0, 1] |
| mAP (mean Average Precision) | 综合精度的平均值,表示模型在不同类别和不同IoU阈值下的检测能力。 | 计算每个类别的AP值,取所有类别的平均值。AP是精度-召回曲线下的面积积分。 | 目标检测任务,评估模型在多个类别上的综合检测能力。 | [0, 1] |
| AP50/75 (Average Precision at IoU=0.5 and IoU=0.75) | 在IoU阈值为0.5或0.75时的平均精度。 | 在不同的IoU阈值下计算AP。通常评估在较宽松和较严格的IoU阈值下的检测性能。 | 目标检测任务,特别用于评估模型在不同IoU重叠度下的表现。 | [0, 1] |
| IoU (Intersection over Union) | 预测框与真实框重叠的区域占两者联合区域的比例。 | IoU = 交集面积 / 并集面积。值越大表示预测框和真实框重叠越多,精度越高。 | 目标检测,评估预测框与真实框的重叠程度,通常在检测结果的后处理过程中使用。 | [0, 1] |
| mIoU (mean Intersection over Union) | 语义分割任务中每个类别的IoU的平均值。 | 计算每个类别的IoU,然后取平均值,表示模型在多个类别上的综合表现。 | 语义分割任务,评估模型在多个类别上分割精度的平均值,尤其适用于多类别的图像分割任务。 | [0, 1] |
| Dice Coefficient | 衡量两个集合相似度的指标,通常用于图像分割任务中,表示分割结果与真实标签的相似度。 | Dice = 2 × (交集面积) / (A区域面积 + B区域面积)。值越大,表示预测分割与真实标签的重叠越多。 | 图像分割任务,特别是实例分割或医学图像分割,评估模型在分割任务中的精度。 | [0, 1] |
| Dice Score | 与Dice Coefficient相似,用于图像分割任务中衡量预测分割区域与真实标签的重叠度。 | 计算预测结果与真实标签之间的相似度,值越高表示分割效果越好。 | 语义分割、实例分割任务,尤其在医学图像分析中应用广泛,用于衡量分割结果与真实标签的重叠情况。 | [0, 1] |
| FPS (Frames per Second) | 每秒钟处理的图像帧数,用于衡量模型的实时性。 | FPS = 总处理帧数 / 处理所需时间。表示模型推理的速度,越高越好。 | 实时检测任务,如自动驾驶、视频监控、实时人脸识别等,评估模型的推理速度。 | [0, ∞) |
| FLOPs (Floating Point Operations) | 浮点运算次数,表示模型计算复杂度。 | 计算网络中各层的浮点运算次数,衡量模型的计算复杂度。 | 评估模型计算资源的消耗,特别在资源受限的设备(如移动端、嵌入式设备)上的效率。 | [0, ∞) |
APdet 和 APloc 总结:
| 指标 | 含义 | 计算步骤 | 公式 |
|---|---|---|---|
| APdet | 平均精度(Detection) | 1. 计算每个检测框的 IoU(预测框与真实框的交并比)。 2. 对所有检测框按置信度进行排序。 3. 计算 Precision 和 Recall。 4. 绘制 Precision-Recall 曲线。 5. 计算每个类别的 AP。 6. 计算所有类别的 mAP(平均AP)。 |  |
| APloc | 平均定位精度(Localization) | 1. 计算每个检测框的 IoU(预测框与真实框的交并比)。 2. 选择适当的 IoU 阈值(通常为 0.5)。 3. 计算 Precision 和 Recall,重点考虑 定位准确度。 4. 绘制 Precision-Recall 曲线。 5. 计算 APloc。 |  |
| APdet vs APloc | 评估目标检测模型的能力 | - APdet:关注目标检测的 整体效果(包括物体识别和定位)。 - APloc:专注于目标检测中的 定位精度。 | - APdet:考虑识别和定位的综合效果。 - APloc:主要评估定位准确性,不关注类别匹配。 |
关键差异:
- APdet:综合评估 目标检测的整体效果,包括物体的识别与定位,计算方式涉及 Precision-Recall 曲线和 IoU 阈值。
- APloc:专注于 定位精度,通过计算预测框与真实框之间的 IoU,评估检测框的 位置准确性。
计算过程总结:
- APdet:通过多个 IoU 阈值(例如,IoU ≥ 0.5、0.75)计算每个类别的平均精度,然后求 mAP(所有类别的平均值)。
- APloc:通常基于较低的 IoU 阈值(例如,IoU ≥ 0.5)来计算 定位精度,重点衡量目标框的空间重叠与准确性。
无监督缺陷检测
无监督缺陷检测任务没有标签数据,传统的准确率、召回率等标准指标不适用。在无监督情境下,可以采用以下指标来评估模型效果:

无监督的缺陷检测评估主要依赖于以下几个方面:
- 重建误差:用于衡量模型在重建图像时,缺陷区域的重建不准确,通常通过MSE或SSIM来量化。
- 聚类质量:通过聚类算法将正常和异常区域分开,利用轮廓系数等评估聚类效果。
- 异常评分:通过计算每个区域或像素的异常分数,找出缺陷区域,评估模型识别缺陷的能力。
- 阈值和区域检测:设定重建误差或异常分数的阈值,找出缺陷区域。
超分辨率重建
吵分辨率重建模型的精度指标
| 指标 | 定义 | 原理 | 使用场景 | 取值范围 |
|---|---|---|---|---|
| PSNR | 峰值信噪比(Peak Signal-to-Noise Ratio) | 衡量重建图像与原始图像之间的误差,越高越好。基于均方误差(MSE)的反比关系。 | 主要用于评估图像的像素级误差,适用于比较图像的精确度。 | 通常取值在 20 ~ 40 dB 之间,值越大表示质量越高。 |
| SSIM | 结构相似性指数(Structural Similarity Index) | 衡量图像的结构相似度,考虑亮度、对比度和结构信息。 | 适用于评估感知质量,常用于超分辨率、图像压缩等领域。 | 取值范围:[-1, 1],值越接近 1 表示结构越相似。 |
| LPIPS | 学习感知图像补丁相似度(Learned Perceptual Image Patch Similarity) | 基于深度学习的感知相似度,利用预训练卷积神经网络(如 VGG)来衡量图像间的感知差异。 | 主要用于感知质量评估,尤其适合图像生成和超分辨率任务。 | 无明确范围,但值越低表示图像越相似。 |
| MAE | 平均绝对误差(Mean Absolute Error) | 衡量像素间的绝对差异。计算原始图像和重建图像之间的每个像素的差异,并求平均。 | 用于量化像素级误差,适用于对比不同图像之间的差异。 | 取值范围:[0, ∞],越小表示误差越小。 |
| MSE | 均方误差(Mean Squared Error) | 衡量像素间的平方误差,重建图像与原图的误差的平方值的平均。 | 主要用于图像恢复、图像去噪等任务的精度评估。 | 取值范围:[0, ∞],越小表示误差越小。 |
| VIF | 视觉信息保真度(Visual Information Fidelity) | 评估图像中保留的视觉信息,模拟人眼感知图像质量。 | 用于超分辨率和生成图像的视觉质量评估,特别关注视觉信息的保真度。 | 取值范围:[0, 1],值越大表示质量越好。 |
| FID | 弗雷歇距离(Fréchet Inception Distance) | 衡量生成图像与真实图像的分布差异,基于 Inception 网络的特征分布进行比较。 | 主要用于生成图像的质量评估,特别是图像生成任务中。 | 取值范围:[0, ∞],值越小表示生成图像与真实图像的分布越接近。 |
| NIQE | 自然图像质量评估(Natural Image Quality Evaluator) | 无参考的图像质量评估方法,通过图像的统计特性与自然图像的模型进行比较。 | 适用于没有参考图像的场景,评估图像的自然性和质量。 | 取值范围:[0, ∞],值越小表示图像越自然。 |
总结:
- PSNR 和 MSE 常用于基于像素的误差评估,尤其适用于工程应用中的精度度量。
- SSIM 和 LPIPS 更侧重感知质量评估,尤其适用于图像生成和超分辨率任务。
- VIF 和 FID 提供了更符合人类视觉感知的评估方式,适合用于生成模型的质量评价。
- MAE 和 MSE 是较简单的度量,但在精度上有效。
- NIQE 是无参考评估指标,适合在没有原始高分辨率图像时使用。
公开数据集
| 数据集名称 | 任务 | 特点 | 标签类型 | 标签意义 | 网址 |
|---|---|---|---|---|---|
| ImageNet | 图像分类、目标检测、图像分割等 | 包含1000类,1400万张图像,覆盖多个物体类别 | 类别标签 | 每个标签表示图像中的物体类别,广泛用于分类任务 | ImageNet |
| COCO | 目标检测、图像分割、关键点检测 | 包含20万目标实例,33万张图像,图像描述 | 类别标签、边界框、分割掩码、关键点 | 目标检测标签、实例分割、关键点坐标等 | COCO |
| MNIST | 手写数字分类 | 70,000张28x28像素的灰度图像,10个数字类别 | 数字标签 | 每个标签表示图像中的数字(0-9) | MNIST |
| Pascal VOC | 目标检测、图像分割、图像分类 | 20类目标,标注了边界框和分割掩码 | 类别标签、边界框、分割掩码 | 目标检测的类别和位置,图像分割的像素级标签 | Pascal VOC |
| ADE20K | 语义分割 | 20,000+张图像,150个类别 | 类别标签 | 每个像素的类别标签,适用于语义分割任务 | ADE20K |
| LFW | 人脸识别 | 13,000多张图像,5,749个不同人 | 人物标签 | 每个标签表示图像中的人的身份 | LFW |
| Fashion-MNIST | 服装分类 | 70,000张28x28像素图像,10种服装类别 | 类别标签 | 每个标签表示图像中的服装类别 | Fashion-MNIST |
| Kitti | 目标检测、深度估计、立体视觉 | 车载相机和激光雷达数据,适用于自动驾驶 | 类别标签、边界框、深度标签 | 目标类别及位置,深度估计标签,适用于立体视觉任务 | Kitti |
| CIFAR-10 | 图像分类 | 32x32像素,10类目标,共70,000张图像 | 类别标签 | 每个标签表示图像所属的类别(如猫、狗、飞机等) | CIFAR-10 |
| CIFAR-100 | 图像分类 | 32x32像素,100类目标,共60,000张图像 | 类别标签 | 每个标签表示图像所属的类别(100类动物、物体等) | CIFAR-100 |
| SUN RGB-D | 3D物体检测、图像分割、语义分割 | 来自RGB和深度传感器的10,000多张室内图像 | 类别标签、3D点云标签 | 物体类别标签、3D点云数据 | SUN RGB-D |
| Cityscapes | 城市街景图像分割 | 高分辨率城市街景图像,应用于自动驾驶 | 类别标签、边界框、实例分割标签 | 每个像素的类别标签,适用于城市街景理解 | Cityscapes |
| Oxford Pets | 物体分类、图像分割 | 7,349张宠物图像,37种宠物类别 | 类别标签、分割掩码 | 每张图像的宠物类别,像素级分割标签 | Oxford Pets |
| Iris Dataset | 分类任务 | 包含150个鸢尾花样本,4个特征(花萼、花瓣长度等) | 类别标签 | 每个样本的类别标签(Setosa, Versicolor, Virginica) | Iris Dataset |
| Flickr8k/Flickr30k | 图像描述 | 各自包含8,000和30,000张图像,每张图像有5个描述 | 文字描述标签 | 图像的自然语言描述,描述图像中的物体、场景等 | Flickr8k / Flickr30k |
| WIDER FACE | 人脸检测 | 包含32,203张图像,400,000+标注人脸框 | 人脸边界框标签 | 每张图像中人脸的位置,适用于人脸检测任务 | WIDER FACE |
| Stanford Dogs | 物体分类 | 包含120个犬种的20,580张图像 | 类别标签 | 每张图像的犬种标签,适用于犬种分类 | Stanford Dogs |
| DeepFashion | 服装分类、服装识别 | 80,000+张图像,包含服装类别和属性标签 | 类别标签、服装属性标签、边界框标签 | 每张图像的服装类别,属性(如颜色、材质)和边界框 | DeepFashion |
相关文章:
目标检测,图像分割,超分辨率重建
目标检测和图像分割 目标检测和图像分割是计算机视觉中的两个不同任务,它们的输出形式也有所不同。下面我将分别介绍这两个任务的输出。图像分割又可以分为:语义分割、实例分割、全景分割。 语义分割(Semantic Segmentation)&…...

微信小程序 城市点击后跳转 并首页显示被点击城市
在微信小程序中,渲染出城市列表后,如何点击城市,就跳转回到首页,并在首页显示所点击的城市呢? 目录 一、定义点击城市的事件 二、首页的处理 首页:点击成都市会跳转到城市列表 城市列表:点击…...

Linux - nfs服务器
五、nfs服务器 1、基础 NFS服务器可以让PC将网络中的NFS服务器共享的目录挂载到本地端的文件系统中,而在本地端的系统 中看来,那个远程主机的目录就好像是自己的一个磁盘分区一样。 由于NFS支持的功能比较多,而不同的功能都会使用不同的程…...

uniapp图片上传预览uni.chooseImage、uni.previewImage
文章目录 1.上传图片2.预览图片 1.上传图片 uni.chooseImage(OBJECT) 从本地相册选择图片或使用相机拍照。 App端如需要更丰富的相机拍照API(如直接调用前置摄像头),参考plus.camera 微信小程序从基础库 2.21.0 开始, wx.choos…...

C++ 字符串中数字识别
【问题描述】 输入一个字符串,含有数字和非数字字符,如“sumabc234;while(abc700)tab{ass346;bssabc267;}”,将其中连续的数字作为一个整数,依次存放到一个数组nums中。例如,234放在nums[0],700放在nums[1…...

学术中常见理论归纳总结-不定期更新
1.信息传播类 1.1 扩散创新理论 创新扩散理论是传播效果研究的经典理论之一,是由美国学者埃弗雷特罗杰斯(E.M.Rogers)于20世纪60年代提出的一个关于通过媒介劝服人们接受新观念、新事物、新产品的理论,侧重大众传播对社会和文化的影响。 1927-1941年进行的“艾奥瓦杂交玉…...

ModelSim怎么修改字体及大小
点击TOOLS 选择PERFERENCES选择下一级菜单的TEXTFONT/CHOOSE/选择字体和大小最后不要忘记点apply再退出...

图片预处理技术介绍4——降噪
图片预处理 大家好,我是阿赵。 这一篇将两种基础的降噪算法。 之前介绍过均值模糊和高斯模糊。如果从降噪的角度来说,模糊算法也算是降噪的一类,所以之前介绍的两种模糊可以称呼为均值降噪和高斯降噪。不过模糊算法对原来的图像特征的…...

Scrapy管道设置和数据保存
1.1 介绍部分: 文字提到常用的Web框架有Django和Flask,接下来将学习一个全球范围内流行的爬虫框架Scrapy。 1.2 内容部分: Scrapy的概念、作用和工作流程 Scrapy的入门使用 Scrapy构造并发送请求 Scrapy模拟登陆 Scrapy管道的使用 Scrapy中…...

D84【python 接口自动化学习】- pytest基础用法
day84 pytest常用断言类型 学习日期:20241130 学习目标:pytest基础用法 -- pytest常用断言类型 学习笔记: 常用断言类型 代码实践 def test_assert():assert 11assert 1!2assert 1<2assert 2>1assert 1>1assert 1<1assert a…...

如何正确书写sh文件/sh任务?bash任务
正确书写xx.sh文件的方式为: source /usr/local/miniconda3/bin/activate condaEnv export CUDA_VISIBLE_DEVICES0 cd /hy-tmp/test export PYTHONPATH"xxx:$PYTHONPATH" python AAA.py python BBB.py python CCC.py 直接运行: bash xx.sh 即可…...
)
多线程篇-5--线程分类(线程类型,springboot中常见线程类型,异步任务线程)
常见的线程类型包括用户线程(User Threads)、守护线程(Daemon Threads)、主线程(Main Thread)、工作线程(Worker Threads)和线程池中的线程。 一、用户线程(User Thread…...

docker快速部署gitlab
文章目录 场景部署步骤默认账号密码效果 场景 新增了一台机器, 在初始化本地开发环境,docker快速部署gitlab 部署步骤 编写dockerfile version: 3.7services:gitlab:image: gitlab/gitlab-ce:latestcontainer_name: gitlabrestart: alwayshostname: gitlabenviron…...

C# 数据类型详解:掌握数据类型及操作为高效编码奠定基础
本文将带你深入了解C#中各种数据类型的特点、用途和最佳实践,让你不仅能熟练运用基本类型,还能掌握如何在实际项目中做出最合适的选择。 目录 C#基本语法 C#数据类型 C#类型转换 C#变量常量 C#基本语法 在学习C#之前我们要先知道C#的基础构建是由哪些…...

burp2
声明! 学习视频来自B站up主 **泷羽sec** 有兴趣的师傅可以关注一下,如涉及侵权马上删除文章,笔记只是方便各位师傅的学习和探讨,文章所提到的网站以及内容,只做学习交流,其他均与本人以及泷羽sec团队无关&a…...

[ACTF2020 新生赛]BackupFile--详细解析
信息搜集 让我们寻找源文件,目录扫描: 找到了/index.php.bak文件,也就是index.php的备份文件。 后缀名是.bak的文件是备份文件,是文件格式的扩展名。 我们访问这个路径,就会直接下载该备份文件。 我们把.bak后缀删掉…...

循环神经网络(RNN)简述
RNN及其变体 1、概述 (一)、概念 RNN(Recurrent Neural Network), 中文称作循环神经网络, 它一般以序列数据为输入, 通过网络内部的结构设计有效捕捉序列之间的关系特征, 一般也是以序列形式进行输出。 RNN的循环机制使模型隐层**上一时间步产生的结果, 能够作为当下时间步…...

九、Ubuntu Linux操作系统
一、Ubuntu简介 Ubuntu Linux是由南非人马克沙特尔沃思(Mark Shutteworth)创办的基于Debian Linux的操作系统,于2004年10月公布Ubuntu是一个以桌面应用为主的Linux发行版操作系统Ubuntu拥有庞大的社区力量,用户可以方便地从社区获得帮助其官方网站:http…...

SpringBoot 新冠密接者跟踪系统:校园疫情防控的智能守护者
摘 要 信息数据从传统到当代,是一直在变革当中,突如其来的互联网让传统的信息管理看到了革命性的曙光,因为传统信息管理从时效性,还是安全性,还是可操作性等各个方面来讲,遇到了互联网时代才发现能补上自古…...

【Ubuntu】E: Unable to locate package xxx
报错描述 在 Ubuntu 上 执行 apt install xxx 出现下面的报错: 即无法定位到该 Package,一般形式如下: # apt install xxx Reading package lists... Done Building dependency tree... Done Reading state information... Done E: Unable …...

逻辑回归:给不确定性划界的分类大师
想象你是一名医生。面对患者的检查报告(肿瘤大小、血液指标),你需要做出一个**决定性判断**:恶性还是良性?这种“非黑即白”的抉择,正是**逻辑回归(Logistic Regression)** 的战场&a…...
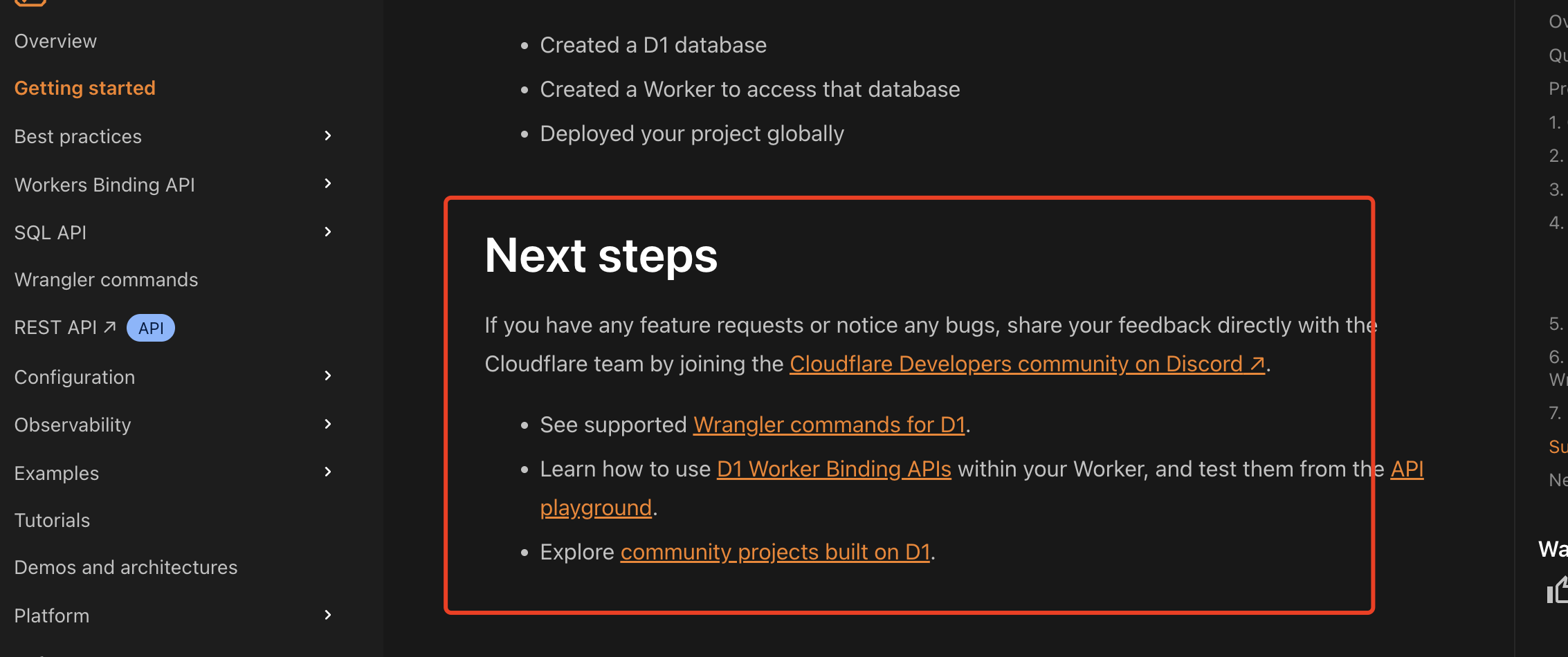
通过Wrangler CLI在worker中创建数据库和表
官方使用文档:Getting started Cloudflare D1 docs 创建数据库 在命令行中执行完成之后,会在本地和远程创建数据库: npx wranglerlatest d1 create prod-d1-tutorial 在cf中就可以看到数据库: 现在,您的Cloudfla…...
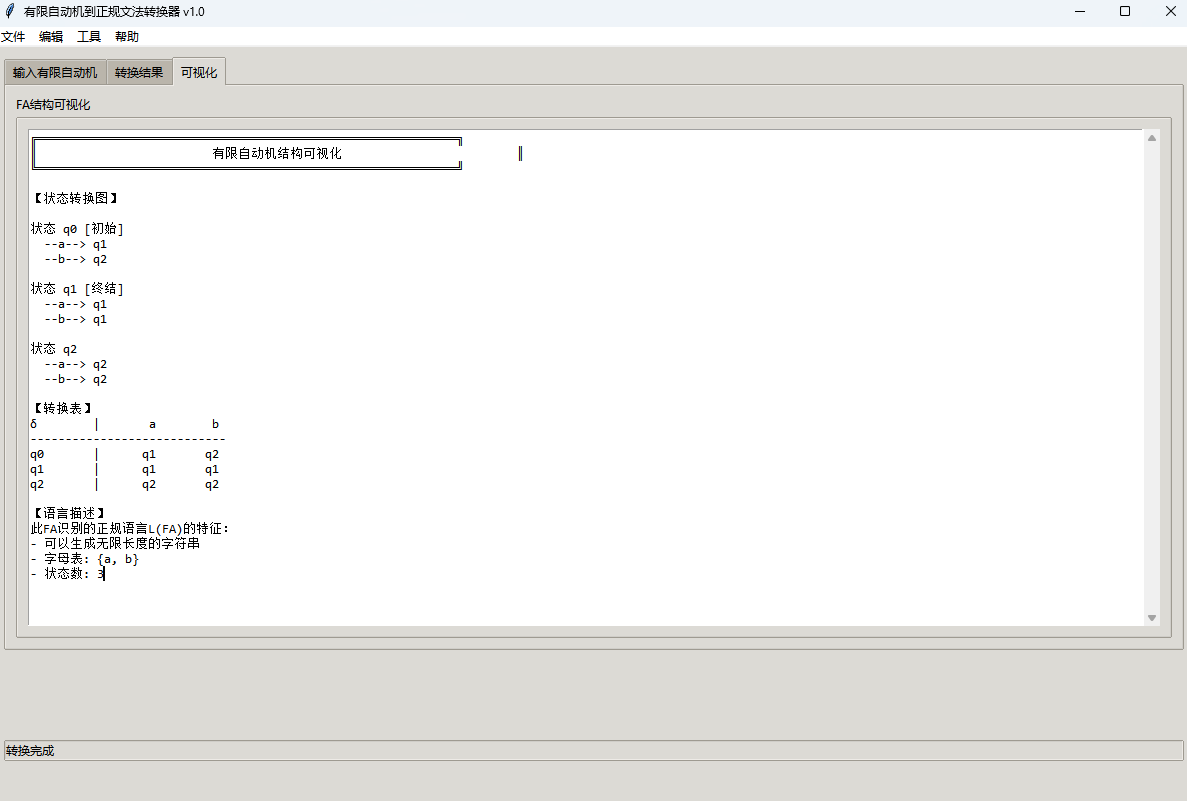
有限自动机到正规文法转换器v1.0
1 项目简介 这是一个功能强大的有限自动机(Finite Automaton, FA)到正规文法(Regular Grammar)转换器,它配备了一个直观且完整的图形用户界面,使用户能够轻松地进行操作和观察。该程序基于编译原理中的经典…...
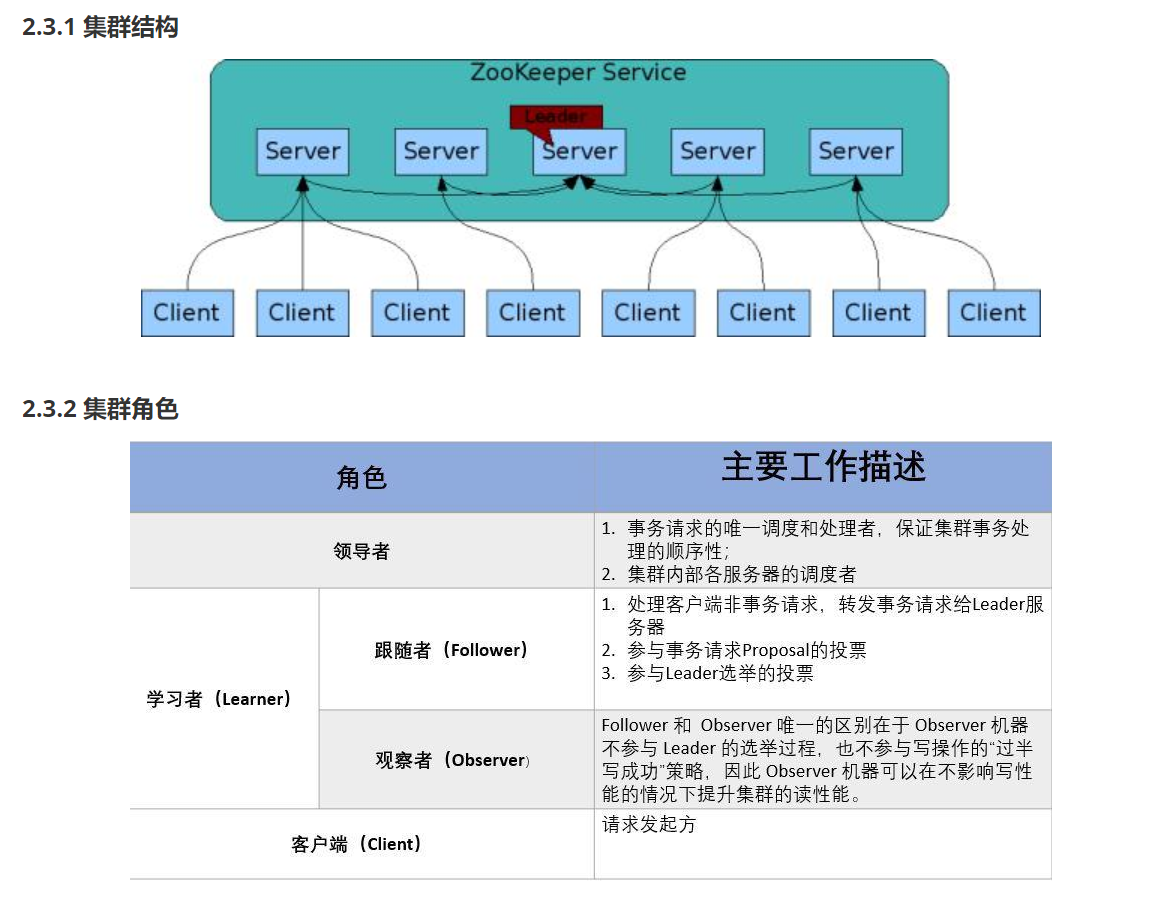
HDFS分布式存储 zookeeper
hadoop介绍 狭义上hadoop是指apache的一款开源软件 用java语言实现开源框架,允许使用简单的变成模型跨计算机对大型集群进行分布式处理(1.海量的数据存储 2.海量数据的计算)Hadoop核心组件 hdfs(分布式文件存储系统)&a…...
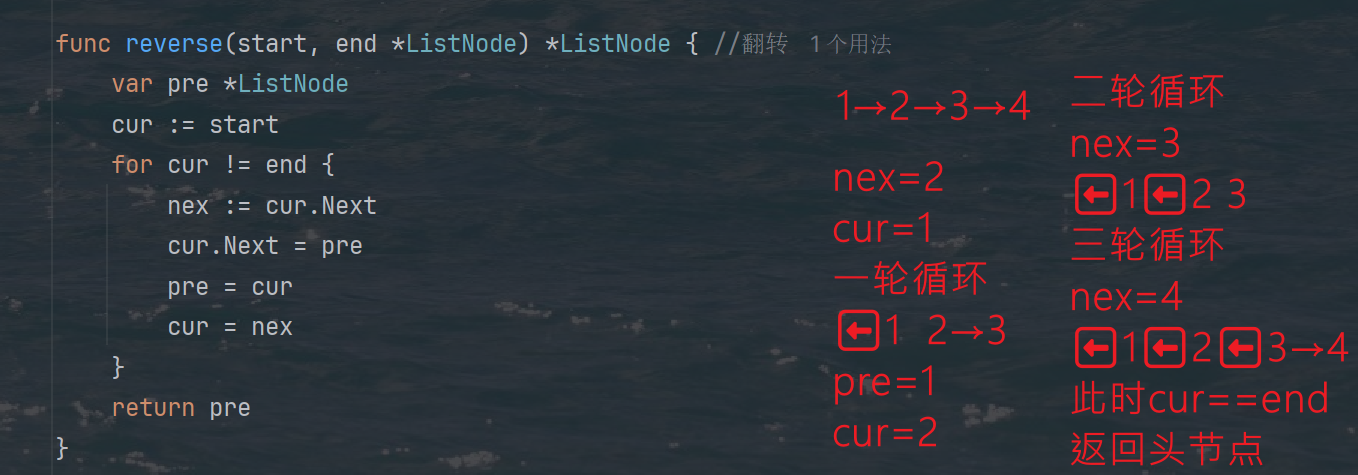
力扣热题100 k个一组反转链表题解
题目: 代码: func reverseKGroup(head *ListNode, k int) *ListNode {cur : headfor i : 0; i < k; i {if cur nil {return head}cur cur.Next}newHead : reverse(head, cur)head.Next reverseKGroup(cur, k)return newHead }func reverse(start, end *ListNode) *ListN…...
并发编程 - go版
1.并发编程基础概念 进程和线程 A. 进程是程序在操作系统中的一次执行过程,系统进行资源分配和调度的一个独立单位。B. 线程是进程的一个执行实体,是CPU调度和分派的基本单位,它是比进程更小的能独立运行的基本单位。C.一个进程可以创建和撤销多个线程;同一个进程中…...
[大语言模型]在个人电脑上部署ollama 并进行管理,最后配置AI程序开发助手.
ollama官网: 下载 https://ollama.com/ 安装 查看可以使用的模型 https://ollama.com/search 例如 https://ollama.com/library/deepseek-r1/tags # deepseek-r1:7bollama pull deepseek-r1:7b改token数量为409622 16384 ollama命令说明 ollama serve #:…...

如何配置一个sql server使得其它用户可以通过excel odbc获取数据
要让其他用户通过 Excel 使用 ODBC 连接到 SQL Server 获取数据,你需要完成以下配置步骤: ✅ 一、在 SQL Server 端配置(服务器设置) 1. 启用 TCP/IP 协议 打开 “SQL Server 配置管理器”。导航到:SQL Server 网络配…...

验证redis数据结构
一、功能验证 1.验证redis的数据结构(如字符串、列表、哈希、集合、有序集合等)是否按照预期工作。 2、常见的数据结构验证方法: ①字符串(string) 测试基本操作 set、get、incr、decr 验证字符串的长度和内容是否正…...

vxe-table vue 表格复选框多选数据,实现快捷键 Shift 批量选择功能
vxe-table vue 表格复选框多选数据,实现快捷键 Shift 批量选择功能 查看官网:https://vxetable.cn 效果 代码 通过 checkbox-config.isShift 启用批量选中,启用后按住快捷键和鼠标批量选取 <template><div><vxe-grid v-bind"gri…...