数字图像稳定DIS介绍目录
之前用OpenCV做过防抖,OpenCV处理时,先处理一遍,再输出视频。二者相差还是挺大的。
前 言.......................................................................................................................................... i
1 概述 ........................................................................................................................................ 1
1.1 概念 ........................................................................................................................................................... 1
1.2 DIS基本原理 .............................................................................................................................................. 1
1.3 DIS的实现 .................................................................................................................................................. 2
2 DIS开发应用 .......................................................................................................................... 4
2.1 DIS使用 ..................................................................................................................................................... 4
2.2 参数设置 .................................................................................................................................................... 4
2.3 陀螺仪使用 ................................................................................................................................................. 9
2.3.1 陀螺仪算法的流程 ................................................................................................................................... 9
2.3.2 陀螺仪驱动参考代码 ............................................................................................................................. 10
2.3.3 适配陀螺仪和图像坐标系方向 ............................................................................................................... 11
2.3.4 镜头标定参数和timelag ........................................................................................................................ 14
2.3.5 hmax_times、vmax和曝光时间 ............................................................................................................ 14
2.3.6 初始化和启动陀螺仪 ............................................................................................................................. 14
2.3.7 陀螺仪和加速度计的配置 ...................................................................................................................... 15
2.3.8 陀螺仪防抖强度的应用方案 ................................................................................................................... 15
2.3.9 IMU传感器参数影响和选型要求 ............................................................................................................ 17
2.3.10 陀螺仪驱动对接流程 ........................................................................................................................... 19
2.4 镜头标定 .................................................................................................................................................. 20
2.4.1 棋盘格标定 ............................................................................................................................................ 20
2.4.1.1 标定工具 ............................................................................................................................................ 20
2.4.1.2 下板端 ................................................................................................................................................ 20
2.4.2 视场角标定 ............................................................................................................................................ 20
2.4.2.1 应用背景 ............................................................................................................................................ 20
2.4.2.2 FOV转换ldc_v2 ................................................................................................................................. 20
2.4.2.3 FOV转换注意事项 .............................................................................................................................. 22
2.4.2.4 FOV转换sample................................................................................................................................ 22
3 FAQ ....................................................................................................................................... 23
3.1 测试陀螺仪数值是否合理 ......................................................................................................................... 23
3.2 陀螺仪时间戳是否平滑 ............................................................................................................................. 25
3.3 正确配置和使能零偏修正功能 .................................................................................................................. 25
3.4 陀螺仪防抖没有效果 ................................................................................................................................ 26
3.5 读取IMU数据的两种方式 ........................................................................................................................ 27
插图目录
图1-1 DIS 原理图 ................................................................................................................................. 2
图2-1 DIS使用流程 .............................................................................................................................. 4
图2-2 timelag在sensor时序中的示意图(减去GYRO_LPF延时之前) ............................................ 7
图2-3 DIS获取陀螺仪数据原理图 ....................................................................................................... 11
图2-4 图像坐标系(相机朝前拍摄) .................................................................................................. 12
图2-5 陀螺仪坐标系 ........................................................................................................................... 12
图2-6 陀螺仪安装位置1 ..................................................................................................................... 13
图2-7 陀螺仪安装位置2 ..................................................................................................................... 14
图2-8 Buffer数据图 ............................................................................................................................
表格目录
表2-1 陀螺仪传感器参数影响和选型要求 ........................................................................................... 17
表2-2 加速计传感器参数影响和选型要求 ........................................................................................... 18
表2-3 FOV转换输出参数ldc_v2取值范围 .........................................................................................
相关文章:

数字图像稳定DIS介绍目录
之前用OpenCV做过防抖,OpenCV处理时,先处理一遍,再输出视频。二者相差还是挺大的。 前 言.......................................................................................................................................... …...

【人工智能-基础】SVM中的核函数到底是什么
文章目录 支持向量机(SVM)中的核函数详解1. 什么是核函数?核函数的作用:2. 核技巧:从低维到高维的映射3. 常见的核函数类型3.1 线性核函数3.2 多项式核函数3.3 高斯径向基函数(RBF核)4. 总结支持向量机(SVM)中的核函数详解 支持向量机(SVM,Support Vector Machine)…...

字节青训Marscode——8:找出整形数组中超过一半的数
问题描述 小R从班级中抽取了一些同学,每位同学都会给出一个数字。已知在这些数字中,某个数字的出现次数超过了数字总数的一半。现在需要你帮助小R找到这个数字。 测试样例 样例1: 输入:array [1, 3, 8, 2, 3, 1, 3, 3, 3] 输出…...

C++ 异步编程的利器std::future和std::promise
1、背景 在现代计算机系统中,许多任务可能需要花费较长时间才能完成,例如网络请求、文件读取、大规模数据计算等。如果在程序中同步地执行这些任务,会导致主线程被阻塞,整个程序在任务执行期间无法响应其他操作,用户体…...

CRM 系统中的 **知识库功能** 的设计与实现
CRM 系统中的 **知识库功能** 旨在为用户提供一个集中的平台,用于存储、组织和管理有关系统功能、常见问题、使用技巧、操作文档等信息。它能够帮助用户高效解决问题、快速获取所需信息,从而提升使用体验并减少客户支持负担。 ### 一、知识库功能的设计…...

重学设计模式-工厂模式(简单工厂模式,工厂方法模式,抽象工厂模式)
在平常的学习和工作中,我们创建对象一般会直接用new,但是很多时候直接new会存在一些问题,而且直接new会让我们的代码变得非常繁杂,这时候就会巧妙的用到设计模式,平常我们通过力扣学习的算法可能并不会在我们工作中用到…...

【C语言】结构体(四)
本篇重点是typedef关键字 一,是什么? typedef用来定义新的数据类型,通常typedef与结构体的定义配合使用。 简单来说就是取别名 ▶ struct 是用来定义新的数据类型——结构体 ▶ typedef是给数据类型取别名。 二,为什么…...

swift类方法为什么使用表派发?
直接上答案:因为表派发允许子类重写父类的方法,并在运行时根据对象的实际类型调用正确的方法实现。 什么是表派发? 首先我们先知道的是,swift当中函数的派发机制主要分为静态派发和动态派发。动态派发又分为表派发和消息派发。 …...

php实现AES/CBC/PKCS5Padding加密
接口文档 文档给过来的案例是java程序的,参照其思路,造一个php版本 构造aes对称加密 public static function encry($data){$data "要加密的数据";$key 你的256位密钥; // 密钥应该是16字节(128位),24字节…...

Anaconda3安装及使用
Anaconda3安装及使用 Linux中安装Anaconda31.安装 Anaconda32.配置环境变量3.验证是否成功 Conda环境和包管理1.Conda 环境初始化2.Conda Env 管理3.Conda 软件包管理 Linux中安装Anaconda3 下面是在Linux中安装Anaconda3-2021.05的教程,其他版本Anaconda更换名字即…...

Argon2-cffi与argon2-cffi-bindings:深入理解及其应用
Argon2-cffi与argon2-cffi-bindings的关系 在Python密码学领域,argon2-cffi和argon2-cffi-bindings是两个经常被提及的库。尽管它们的名字相似,但它们在实现和用途上有所不同。argon2-cffi是一个提供Argon2哈希算法的Python库,而argon2-cffi-…...

spring boot+jpa接入达梦数据库
文章目录 前言依赖配置对应的domain类和repository 前言 最近有一个新项目,由于信息安全等要求只能使用达梦数据库(dm8),之前从来没用过,特此开一个笔记记录一下spring bootjpa如何使用达梦数据库完成开发。 依赖 p…...

Vite构建,用NodeJS搭建一个简单的Vite服务
Vite 是一个现代的前端构建工具,由 Vue.js 作者尤雨溪创建。它主要用于开发和构建现代 JavaScript 应用,尤其是单页应用(SPA)。Vite 相比于传统的构建工具(如 Webpack)有几个显著的优势: 即时开…...

R语言机器学习论文(六):总结
文章目录 介绍参考文献介绍 本文采用R语言对来自进行数据描述、数据预处理、特征筛选和模型构建。 最后我们获得了一个能有效区分乳腺组织的随机森林预测模型,它的性能非常好,这意味着它可能拥有非常好的临床价值。 在本文中,我们利用R语言对来自美国加州大学欧文分校的B…...
)
python---面向对象---综合案例(4)
案例描述 实现加减乘法运算 # _*_ encoding:utf-8 _*_# 计算器, 实现一些基本的操作, 加减乘除运算, 以及打印结果操作# ------------------------------------代码1-------------------------------------- def jia(n1, n2):return n1 n2def jian(n1, n2):return n1 - n2de…...

如何参加华为欧拉考试?
华为欧拉考试主要针对的是华为欧拉(EulerOS/openEuler)操作系统的认证考试,这一认证体系旨在培养和认证具备基于欧拉操作系统进行企业级应用运行基础环境搭建、管理和调测能力的工程师以及云计算架构师。以下是对华为欧拉考试的详细介绍&…...

算法预刷题Day9:BM28 二叉树的最大深度
描述: 描述 求给定二叉树的最大深度, 深度是指树的根节点到任一叶子节点路径上节点的数量。 最大深度是所有叶子节点的深度的最大值。 (注:叶子节点是指没有子节点的节点。) 思路: 当前节点的最大高度 ma…...

exp_lr_scheduler理解
1. exp_lr_scheduler理解 这行代码定义了一个学习率调度器,用于动态调整训练过程中优化器的学习率。让我们分解并解释其含义: 1. exp_lr_scheduler 是什么? exp_lr_scheduler 是一个 学习率调度器(LR Scheduler),由 torch.optim.lr_scheduler.StepLR 创建,旨在按照预…...

Algorithm:河内之塔
1. 说明 河内之塔(Towers of Hanoi)是法国人 M.Claus(Lucas)于1883年从泰国带至法国的,河内为越战时北越的首都,即现在的胡志明市;1883年法国数学家 Edouard Lucas 曾提及这个故事,据…...

集中管理与实时审计:构建Linux集群(1300台服务器)日志平台的最佳实践
简介 随着企业IT基础设施的不断扩大,Linux服务器的数量也日益增多,传统的单机日志管理方式已无法满足对日志数据集中管理、审计和分析的需求。尤其是在大型集群环境中,如何高效地收集、存储和分析日志成为了一项重要的技术挑战。 背景 在实…...
)
rknn优化教程(二)
文章目录 1. 前述2. 三方库的封装2.1 xrepo中的库2.2 xrepo之外的库2.2.1 opencv2.2.2 rknnrt2.2.3 spdlog 3. rknn_engine库 1. 前述 OK,开始写第二篇的内容了。这篇博客主要能写一下: 如何给一些三方库按照xmake方式进行封装,供调用如何按…...

Python爬虫实战:研究feedparser库相关技术
1. 引言 1.1 研究背景与意义 在当今信息爆炸的时代,互联网上存在着海量的信息资源。RSS(Really Simple Syndication)作为一种标准化的信息聚合技术,被广泛用于网站内容的发布和订阅。通过 RSS,用户可以方便地获取网站更新的内容,而无需频繁访问各个网站。 然而,互联网…...
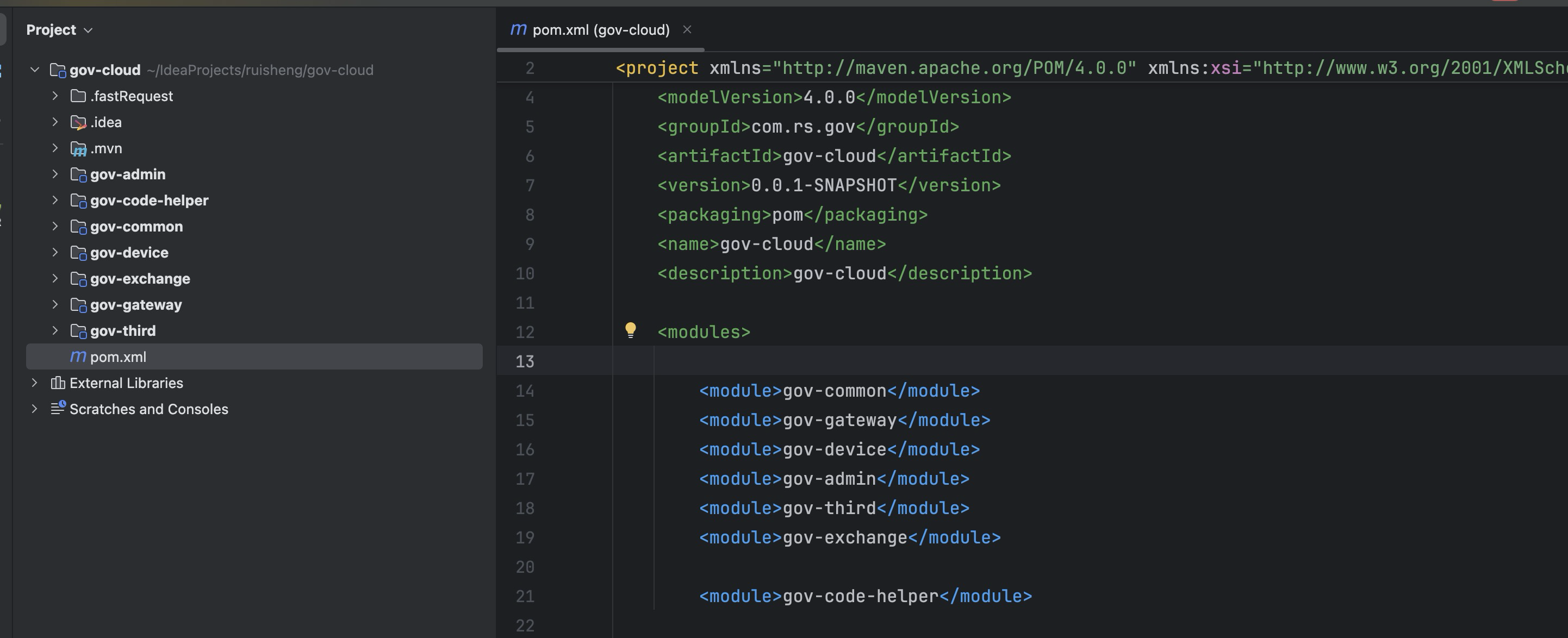
最新SpringBoot+SpringCloud+Nacos微服务框架分享
文章目录 前言一、服务规划二、架构核心1.cloud的pom2.gateway的异常handler3.gateway的filter4、admin的pom5、admin的登录核心 三、code-helper分享总结 前言 最近有个活蛮赶的,根据Excel列的需求预估的工时直接打骨折,不要问我为什么,主要…...
CSS | transition 和 transform的用处和区别
省流总结: transform用于变换/变形,transition是动画控制器 transform 用来对元素进行变形,常见的操作如下,它是立即生效的样式变形属性。 旋转 rotate(角度deg)、平移 translateX(像素px)、缩放 scale(倍数)、倾斜 skewX(角度…...

【FTP】ftp文件传输会丢包吗?批量几百个文件传输,有一些文件没有传输完整,如何解决?
FTP(File Transfer Protocol)本身是一个基于 TCP 的协议,理论上不会丢包。但 FTP 文件传输过程中仍可能出现文件不完整、丢失或损坏的情况,主要原因包括: ✅ 一、FTP传输可能“丢包”或文件不完整的原因 原因描述网络…...

比特币:固若金汤的数字堡垒与它的四道防线
第一道防线:机密信函——无法破解的哈希加密 将每一笔比特币交易比作一封在堡垒内部传递的机密信函。 解释“哈希”(Hashing)就是一种军事级的加密术(SHA-256),能将信函内容(交易细节…...
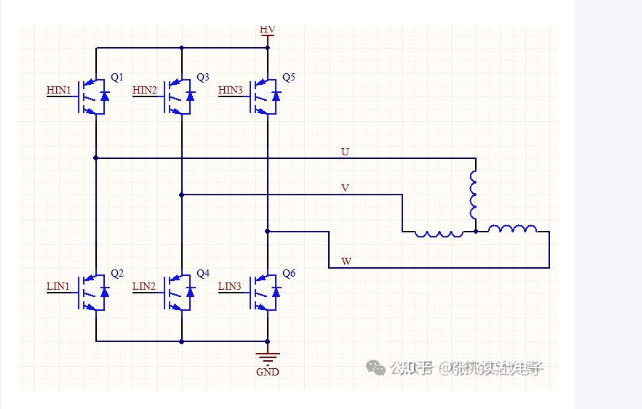
运动控制--BLDC电机
一、电机的分类 按照供电电源 1.直流电机 1.1 有刷直流电机(BDC) 通过电刷与换向器实现电流方向切换,典型应用于电动工具、玩具等 1.2 无刷直流电机(BLDC) 电子换向替代机械电刷,具有高可靠性,常用于无人机、高端家电…...

Java求职者面试指南:Spring、Spring Boot、Spring MVC与MyBatis技术点解析
Java求职者面试指南:Spring、Spring Boot、Spring MVC与MyBatis技术点解析 第一轮:基础概念问题 请解释Spring框架的核心容器是什么?它的作用是什么? 程序员JY回答:Spring框架的核心容器是IoC容器(控制反转…...

【芯片仿真中的X值:隐藏的陷阱与应对之道】
在芯片设计的世界里,X值(不定态)就像一个潜伏的幽灵。它可能让仿真测试顺利通过,却在芯片流片后引发灾难性后果。本文将揭开X值的本质,探讨其危害,并分享高效调试与预防的实战经验。 一、X值的本质与致…...
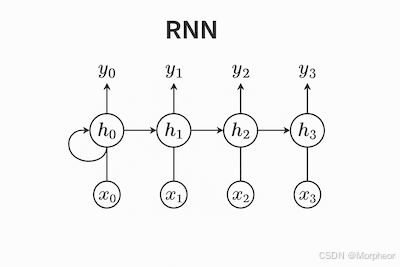
循环神经网络(RNN):从理论到翻译
循环神经网络(RNN)是一种专为处理序列数据设计的神经网络,如时间序列、自然语言或语音。与传统的全连接神经网络不同,RNN具有"记忆"功能,通过循环传递信息,使其特别适合需要考虑上下文或顺序的任…...