FreeRTOS之ARM CR5栈结构操作示意图
FreeRTOS之ARM CR5栈结构操作示意图
- 1 FreeRTOS源码下载地址
- 2 ARM CR5栈结构操作宏和接口
- 2.1 portSAVE_CONTEXT宏
- 2.1.1 portSAVE_CONTEXT源码
- 2.1.2 portSAVE_CONTEXT宏操作栈结构变化示意图
- 2.2 portRESTORE_CONTEXT宏
- 2.2.1 portRESTORE_CONTEXT源码
- 2.2.2 portRESTORE_CONTEXT宏操作栈结构变化示意图
- 2.3 pxPortInitialiseStack
- 2.3.1 pxPortInitialiseStack源码
- 3.2.2 pxPortInitialiseStack栈结构变化示意图
- 2.4 pxPortInitialiseStack调用关系
- 2.5 portRESTORE_CONTEXT调用关系
- 3 参考文章
下面以FreeRTOS源码中arm cortex-r5处理器的栈处理为例来介绍栈结构操作前后变化。
1 FreeRTOS源码下载地址
https://www.freertos.org/

2 ARM CR5栈结构操作宏和接口
.macro portSAVE_CONTEXT.macro portRESTORE_CONTEXTpxPortInitialiseStack
2.1 portSAVE_CONTEXT宏
2.1.1 portSAVE_CONTEXT源码
.macro portSAVE_CONTEXT/* Save the LR and SPSR onto the system mode stack before switching tosystem mode to save the remaining system mode registers. */SRSDB sp!, #SYS_MODECPS #SYS_MODEPUSH {R0-R12, R14}/* Push the critical nesting count. */LDR R2, ulCriticalNestingConstLDR R1, [R2]PUSH {R1}#if defined( __ARM_FP )/* Does the task have a floating point context that needs saving? IfulPortTaskHasFPUContext is 0 then no. */LDR R2, ulPortTaskHasFPUContextConstLDR R3, [R2]CMP R3, #0/* Save the floating point context, if any. */FMRXNE R1, FPSCRPUSHNE {R1}VPUSHNE {D0-D15}/* Save ulPortTaskHasFPUContext itself. */PUSH {R3}#endif /* __ARM_FP *//* Save the stack pointer in the TCB. */LDR R0, pxCurrentTCBConstLDR R1, [R0]STR SP, [R1].endm
2.1.2 portSAVE_CONTEXT宏操作栈结构变化示意图

2.2 portRESTORE_CONTEXT宏
2.2.1 portRESTORE_CONTEXT源码
.macro portRESTORE_CONTEXT/* Set the SP to point to the stack of the task being restored. */LDR R0, pxCurrentTCBConstLDR R1, [R0]LDR SP, [R1]#if defined( __ARM_FP )/** Is there a floating point context to restore? If the restored* ulPortTaskHasFPUContext is zero then no.*/LDR R0, ulPortTaskHasFPUContextConstPOP {R1}STR R1, [R0]CMP R1, #0/* Restore the floating point context, if any. */VPOPNE {D0-D15}POPNE {R0}VMSRNE FPSCR, R0#endif /* __ARM_FP *//* Restore the critical section nesting depth. */LDR R0, ulCriticalNestingConstPOP {R1}STR R1, [R0]/* Ensure the priority mask is correct for the critical nesting depth. */LDR R2, ulICCPMRConstLDR R2, [R2]CMP R1, #0MOVEQ R4, #255LDRNE R4, ulMaxAPIPriorityMaskConstLDRNE R4, [R4]STR R4, [R2]/* Restore all system mode registers other than the SP (which is alreadybeing used). */POP {R0-R12, R14}/* Return to the task code, loading CPSR on the way. */RFEIA sp!.endm
2.2.2 portRESTORE_CONTEXT宏操作栈结构变化示意图

2.3 pxPortInitialiseStack
2.3.1 pxPortInitialiseStack源码
/** See header file for description.*/
StackType_t * pxPortInitialiseStack( StackType_t * pxTopOfStack,TaskFunction_t pxCode,void * pvParameters )
{/** Setup the initial stack of the task. The stack is set exactly as* expected by the portRESTORE_CONTEXT() macro.** The fist real value on the stack is the status register, which is set for* system mode, with interrupts enabled. A few NULLs are added first to ensure* GDB does not try decoding a non-existent return address.*/*pxTopOfStack = ( StackType_t ) NULL;pxTopOfStack--;*pxTopOfStack = ( StackType_t ) NULL;pxTopOfStack--;*pxTopOfStack = ( StackType_t ) NULL;pxTopOfStack--;*pxTopOfStack = ( StackType_t ) portINITIAL_SPSR;if( ( ( uint32_t ) pxCode & portTHUMB_MODE_ADDRESS ) != 0x00UL ){/* The task will start in THUMB mode. */*pxTopOfStack |= portTHUMB_MODE_BIT;}pxTopOfStack--;/* Next the return address, which in this case is the start of the task. */*pxTopOfStack = ( StackType_t ) pxCode;pxTopOfStack--;/* Next all the registers other than the stack pointer. */*pxTopOfStack = ( StackType_t ) portTASK_RETURN_ADDRESS; /* R14 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x12121212; /* R12 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x11111111; /* R11 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x10101010; /* R10 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x09090909; /* R9 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x08080808; /* R8 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x07070707; /* R7 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x06060606; /* R6 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x05050505; /* R5 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x04040404; /* R4 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x03030303; /* R3 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x02020202; /* R2 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) 0x01010101; /* R1 */pxTopOfStack--;*pxTopOfStack = ( StackType_t ) pvParameters; /* R0 *//** The task will start with a critical nesting count of 0 as interrupts are* enabled.*/pxTopOfStack--;*pxTopOfStack = portNO_CRITICAL_NESTING;#if ( configUSE_TASK_FPU_SUPPORT == 1 ){/** The task will start without a floating point context.* A task that uses the floating point hardware must call* vPortTaskUsesFPU() before executing any floating point* instructions.*/pxTopOfStack--;*pxTopOfStack = portNO_FLOATING_POINT_CONTEXT;}#elif ( configUSE_TASK_FPU_SUPPORT == 2 ){/** The task will start with a floating point context. Leave enough* space for the registers and ensure they are initialized to 0.*/pxTopOfStack -= portFPU_REGISTER_WORDS;memset( pxTopOfStack, 0x00, portFPU_REGISTER_WORDS * sizeof( StackType_t ) );pxTopOfStack--;*pxTopOfStack = pdTRUE;ulPortTaskHasFPUContext = pdTRUE;}#elif ( configUSE_TASK_FPU_SUPPORT != 0 ){#error Invalid configUSE_TASK_FPU_SUPPORT setting - configUSE_TASK_FPU_SUPPORT must be set to 0, 1, or 2.}#endif /* configUSE_TASK_FPU_SUPPORT */return pxTopOfStack;
}
3.2.2 pxPortInitialiseStack栈结构变化示意图

2.4 pxPortInitialiseStack调用关系
|- xTaskCreate( pxIdleTaskFunction, ...)|- prvCreateTask|- pxStack = pvPortMallocStack( ( ( ( size_t ) uxStackDepth ) * sizeof( StackType_t ) ) );|- pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) );|- prvInitialiseNewTask|- vListInitialiseItem( &( pxNewTCB->xStateListItem ) );|- vListInitialiseItem( &( pxNewTCB->xEventListItem ) );|- pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxTaskCode, pvParameters );
2.5 portRESTORE_CONTEXT调用关系
|- vTaskStartScheduler|- prvCreateIdleTasks()|- xTaskCreate( pxIdleTaskFunction, ...)|- prvCreateTask|- pxStack = pvPortMallocStack( ( ( ( size_t ) uxStackDepth ) * sizeof( StackType_t ) ) );|- pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) );|- prvInitialiseNewTask|- vListInitialiseItem( &( pxNewTCB->xStateListItem ) );|- vListInitialiseItem( &( pxNewTCB->xEventListItem ) );|- pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxTaskCode, pvParameters );|- *pxCreatedTask = ( TaskHandle_t ) pxNewTCB;|- prvAddNewTaskToReadyList|- prvInitialiseTaskLists|- prvAddTaskToReadyList|- listINSERT_END( &( pxReadyTasksLists[ ( pxTCB )->uxPriority ] ), &( ( pxTCB )->xStateListItem ) );|- xTimerCreateTimerTask()|- xTaskCreateAffinitySet|- prvCreateTask|- pxStack = pvPortMallocStack( ( ( ( size_t ) uxStackDepth ) * sizeof( StackType_t ) ) );|- pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) );|- prvInitialiseNewTask|- vListInitialiseItem( &( pxNewTCB->xStateListItem ) );|- vListInitialiseItem( &( pxNewTCB->xEventListItem ) );|- pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxTaskCode, pvParameters );|- *pxCreatedTask = ( TaskHandle_t ) pxNewTCB;|- prvAddNewTaskToReadyList|- prvInitialiseTaskLists|- prvAddTaskToReadyList|- listINSERT_END( &( pxReadyTasksLists[ ( pxTCB )->uxPriority ] ), &( ( pxTCB )->xStateListItem ) )|- pxNewTCB->uxCoreAffinityMask = uxCoreAffinityMask;|- prvAddNewTaskToReadyList( pxNewTCB );|- xPortStartScheduler()|- vPortRestoreTaskContext|- portRESTORE_CONTEXT3 参考文章
arm汇编指令之数据块传输(LDM,STM)详见
arm 处理器的堆栈操作
相关文章:
FreeRTOS之ARM CR5栈结构操作示意图
FreeRTOS之ARM CR5栈结构操作示意图 1 FreeRTOS源码下载地址2 ARM CR5栈结构操作宏和接口2.1 portSAVE_CONTEXT宏2.1.1 portSAVE_CONTEXT源码2.1.2 portSAVE_CONTEXT宏操作栈结构变化示意图 2.2 portRESTORE_CONTEXT宏2.2.1 portRESTORE_CONTEXT源码2.2.2 portRESTORE_CONTEXT宏…...

Java线程的interrupt中断、wait-notify/all(源码级分析)
实例方法: interrupt()方法是设置结束阻塞(sleep、),并且设置中断标记true isInterrupted()判断当前是否中断 静态方法: Thread.interrupted():调用这个方法的线程中断标记位还原为false 那么好,既然上面的方法作用是清晰的&…...

计网408考点讲解
IPv4...

当linux可执行文件缺少或者不兼容so库时候,如何查看版本以及缺少那些库
解决方法: ldd 命令来验证程序是否加载了正确的库: 如检查linear_elasticity可执行文件缺少的库,用下面命令: ldd linear_elasticity 可以发现下面not found就是缺少的库,还有对应的库的位置已经版本 $ ldd lin…...

文件下载的几种方式
1、使用window.open方法 url: 可以为文件存放的地址 function downloadFile(url) {window.open(url); }2、使用<a>标签进行文件下载 <a href"/多因素登录说明文档.pdf" class"link-text">说明文档</a> 3、使用fetch和Blob对象 这种…...

车联网安全学习之TBOX
Telematics BOX,简称 T-BOX,也称远程信息处理控制单元(Telematics Control Unit, TCU),集成GPS、外部通信接口、电子处理单元、微控制器、移动通信单元和存储器等功能模块。 TBOX 提供的功能有网络接入、OTA、远程控制…...

访问http网页强制跳转到了https的解决办法
目录 解决浏览器自动从 HTTP 重定向到 HTTPS 的问题问题原因:HSTS(HTTP Strict Transport Security)什么是 HSTS?HSTS 的工作原理 如何解决?1. 清除浏览器的 HSTS 信息在 Chrome 中清除 HSTS 信息:在 Firef…...

3D 生成重建016-SA3D从nerf中分割一切
3D 生成重建016-SA3D从nerf中分割一切 文章目录 0 论文工作1 方法介绍2 实验结果 0 论文工作 1 SAM的背景和目标: SAM 是一种强大的二维视觉基础模型,能够在 2D 图像中进行任意物体的分割。传统上,SAM 在二维空间表现出色,但其无…...

阿里云整理(二)
阿里云整理 1. 访问网站2. 专业名词2.1 域名2.2 域名备案2.3 云解析DNS2.4 CDN2.5 WAF 1. 访问网站 用户使用浏览器访问网站大体分为几个过程: 用户在浏览器输入域名URL,例如www.baidu.com。 不过,浏览器并不知道为该域名提供服务的服务器具…...

qt基本部分控件用法(一)
前言: 以前 windows下做工具主要是MFC,趁有点空时间,研究了QT,感觉跟MFC 差不多,VS 比 QT CREATOR 还是强大,不过QT可以跨平台,功能更强大,MFC 只能在win平台下.; 1:环境…...

【Linux】环境ChatGLM-4-9B 模型之 openai API 服务
一、摘要 最近看到 Function Call 比较感兴趣,它的核心是赋予大模型能够调用外部API的能力,能够解决大模型功能扩展性问题,允许模型调用外部数据库或API,提供特定领域的详细信息;解决信息实时性问题,模型可以实时获取最新数据;解决数据局限性问题,大模型训练数据虽多但…...

Too many open files 问题处理
某个简单的 python 服务,运行一段时间就崩溃。查看日志后发现有一个系统错误 OSError: Errno24 Too many open files要理解这个问题,首先要理解什么是文件描述符,可以参考我的另一篇文章(Linux 系统文件描述符(File Descriptor&a…...

CentOS 7 环境下常见的操作和配置
目录 1. CentOS 7 中的 vsftpd 配置与使用 安装与启动 vsftpd 配置 vsftpd(/etc/vsftpd/vsftpd.conf) 常见命令 2. 使用 yum 包管理器 3. 安全性与防火墙配置 开放端口 4. 使用 systemd 管理服务 5. SELinux 配置 查看 SELinux 状态 临时禁用…...

HTTP(超文本传输协议)
HTTP是万维网通信的基础构成,是一个简单的请求相应协议,基于TCP之上80号端口 通信原理 DNS解析 将域名甩个DNS服务器解析,将域名化为IP访问 建立TCP连接 如图,客户端先发送一个sys置位seq为x(任意值)的…...
-readIndexRead)
etcd-v3.5release-(3)-readIndexRead
笔记1:读操作包括两种,readIndex和serilizable,readIndex指一致性读,一旦a读到了数据x,那么a及a以后的数据都能读到x,readIndex读会先确认本leader是不是有效地leader,如果有效则记录此刻的comm…...

IPv6 NA RTR/SOL/OVR标志位,单播多播选择,ndppd代理和kernel配置
NA消息用单播还是多播的判断理由 单播回复(Unicast): 如果客户端发送 RS 消息时,使用的是一个全局地址或链路本地地址作为源地址,则 RA 消息会单播回复到客户端的源地址。这种方式减少了网络中的广播流量,…...

C语言程序设计P5-4【应用函数进行程序设计 | 第四节】——知识要点:数组作函数参数
知识要点:数组作函数参数 视频: 目录 一、任务分析 二、必备知识与理论 三、任务实施 一、任务分析 任务要求用选择法对数组中的 10 个整数按由小到大的顺序排序,前面在讲解数组时讲冒泡法排序曾提到选择法排序的思想。 所谓选择法就是…...

PostgreSQL数据库连接:psqlODBC驱动安装与配置实战指南
本文还有配套的精品资源,点击获取 简介:本文将提供详细的psqlODBC驱动程序在Windows操作系统上的安装和配置指南,使用户能够通过ODBC标准连接到PostgreSQL数据库。安装步骤涵盖获取安装文件、运行安装向导、选择安装路径、完成安装以及配置…...

【NLP 8、normalization归一化函数:sigmoid、softmax】
目录 Normalization(归一化) 1.特点 目的 应用场景 输出范围 2. Sigmoid 函数 目的 应用场景 输出范围 3. Softmax 函数 目的 应用场景 输出范围 "燃尽最后的本能,意志力会带你杀出重围" —— 24.12.2 Normalization&#…...

鸿蒙ArkTS 与安卓Android-底层逻辑对比
鸿蒙OS(ArkTS) 架构: 鸿蒙OS采用了微内核架构,其核心操作系统将设备的硬件资源和服务进行模块化,微内核负责最基本的服务(如调度、通信、同步等),而其他功能则由用户空间的进程提供。…...
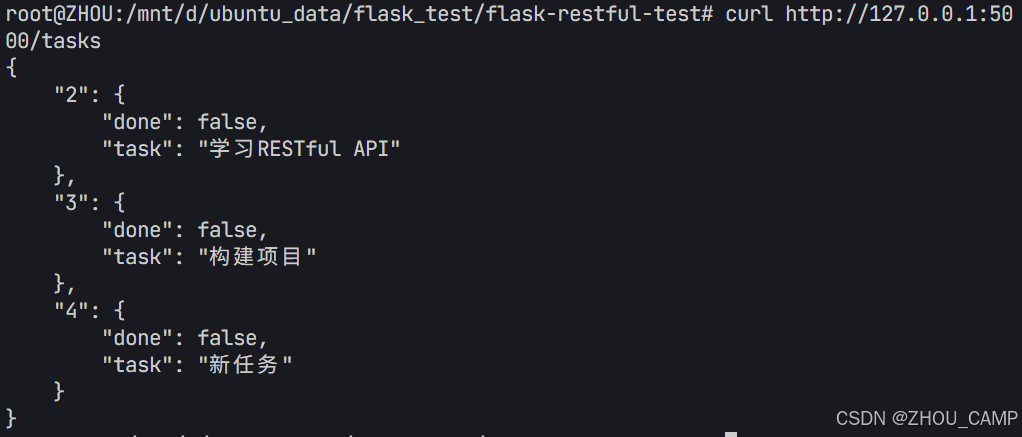
Flask RESTful 示例
目录 1. 环境准备2. 安装依赖3. 修改main.py4. 运行应用5. API使用示例获取所有任务获取单个任务创建新任务更新任务删除任务 中文乱码问题: 下面创建一个简单的Flask RESTful API示例。首先,我们需要创建环境,安装必要的依赖,然后…...

《Qt C++ 与 OpenCV:解锁视频播放程序设计的奥秘》
引言:探索视频播放程序设计之旅 在当今数字化时代,多媒体应用已渗透到我们生活的方方面面,从日常的视频娱乐到专业的视频监控、视频会议系统,视频播放程序作为多媒体应用的核心组成部分,扮演着至关重要的角色。无论是在个人电脑、移动设备还是智能电视等平台上,用户都期望…...
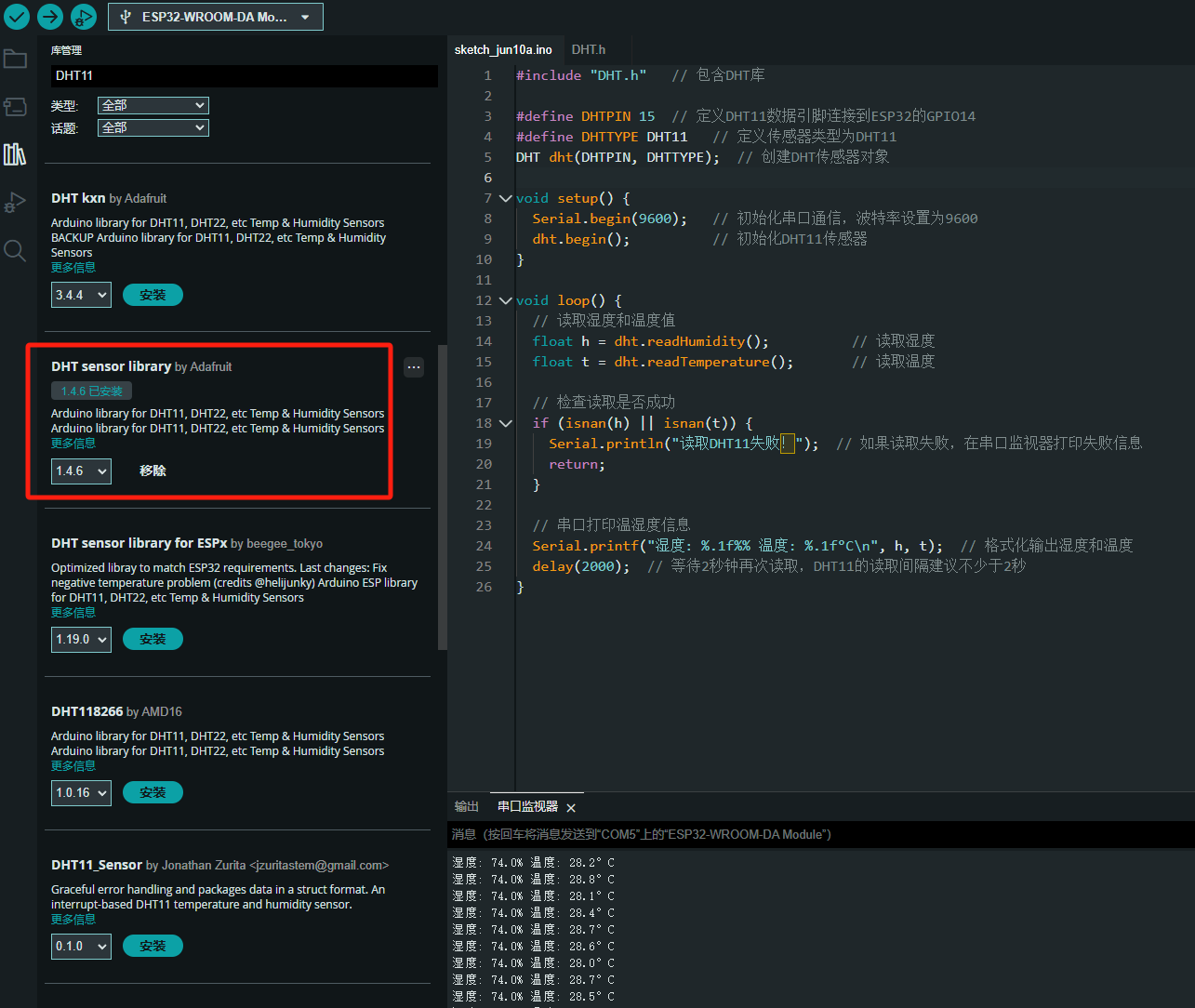
ESP32读取DHT11温湿度数据
芯片:ESP32 环境:Arduino 一、安装DHT11传感器库 红框的库,别安装错了 二、代码 注意,DATA口要连接在D15上 #include "DHT.h" // 包含DHT库#define DHTPIN 15 // 定义DHT11数据引脚连接到ESP32的GPIO15 #define D…...

对WWDC 2025 Keynote 内容的预测
借助我们以往对苹果公司发展路径的深入研究经验,以及大语言模型的分析能力,我们系统梳理了多年来苹果 WWDC 主题演讲的规律。在 WWDC 2025 即将揭幕之际,我们让 ChatGPT 对今年的 Keynote 内容进行了一个初步预测,聊作存档。等到明…...

Qt Http Server模块功能及架构
Qt Http Server 是 Qt 6.0 中引入的一个新模块,它提供了一个轻量级的 HTTP 服务器实现,主要用于构建基于 HTTP 的应用程序和服务。 功能介绍: 主要功能 HTTP服务器功能: 支持 HTTP/1.1 协议 简单的请求/响应处理模型 支持 GET…...
:爬虫完整流程)
Python爬虫(二):爬虫完整流程
爬虫完整流程详解(7大核心步骤实战技巧) 一、爬虫完整工作流程 以下是爬虫开发的完整流程,我将结合具体技术点和实战经验展开说明: 1. 目标分析与前期准备 网站技术分析: 使用浏览器开发者工具(F12&…...
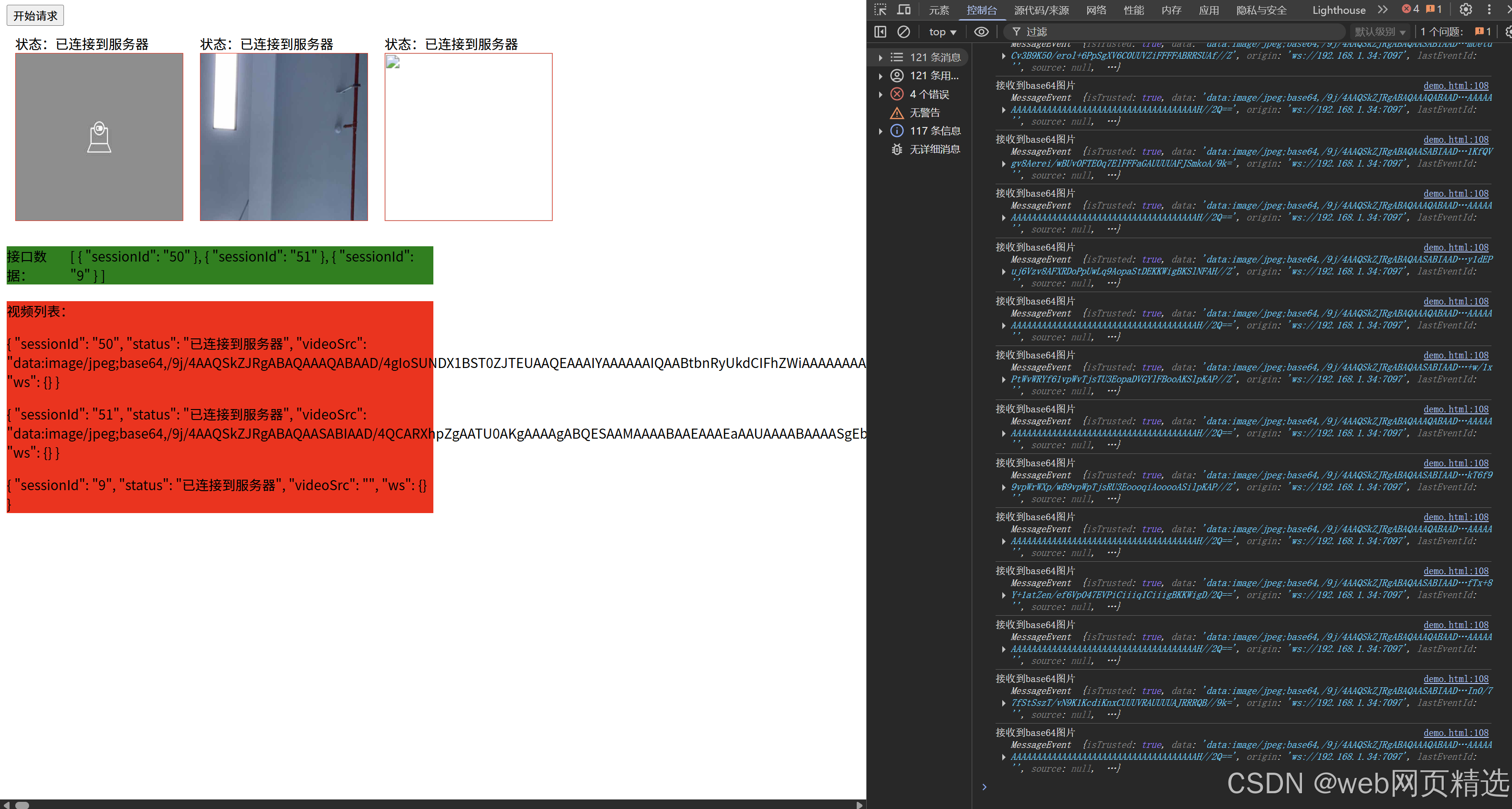
uniapp微信小程序视频实时流+pc端预览方案
方案类型技术实现是否免费优点缺点适用场景延迟范围开发复杂度WebSocket图片帧定时拍照Base64传输✅ 完全免费无需服务器 纯前端实现高延迟高流量 帧率极低个人demo测试 超低频监控500ms-2s⭐⭐RTMP推流TRTC/即构SDK推流❌ 付费方案 (部分有免费额度&#x…...
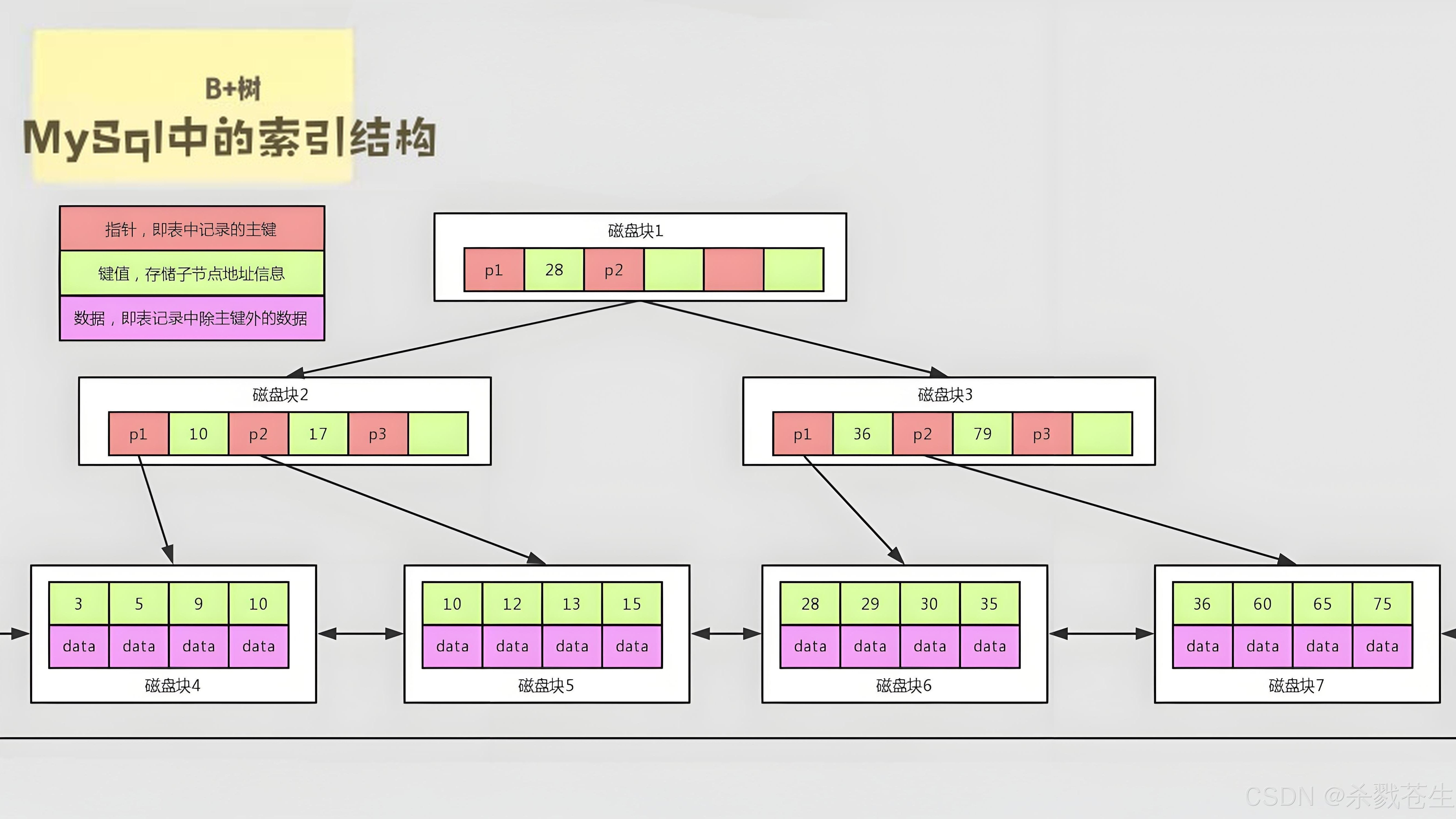
ElasticSearch搜索引擎之倒排索引及其底层算法
文章目录 一、搜索引擎1、什么是搜索引擎?2、搜索引擎的分类3、常用的搜索引擎4、搜索引擎的特点二、倒排索引1、简介2、为什么倒排索引不用B+树1.创建时间长,文件大。2.其次,树深,IO次数可怕。3.索引可能会失效。4.精准度差。三. 倒排索引四、算法1、Term Index的算法2、 …...

AI编程--插件对比分析:CodeRider、GitHub Copilot及其他
AI编程插件对比分析:CodeRider、GitHub Copilot及其他 随着人工智能技术的快速发展,AI编程插件已成为提升开发者生产力的重要工具。CodeRider和GitHub Copilot作为市场上的领先者,分别以其独特的特性和生态系统吸引了大量开发者。本文将从功…...

React---day11
14.4 react-redux第三方库 提供connect、thunk之类的函数 以获取一个banner数据为例子 store: 我们在使用异步的时候理应是要使用中间件的,但是configureStore 已经自动集成了 redux-thunk,注意action里面要返回函数 import { configureS…...