C++哈希(一)
1.底层结构
顺序结构以及平衡中,元素关键码与其存储位置之间没有相对应的关系,因此在查找一个元素时,要经过关键码的多次比较。顺序查找的时间复杂度为O(N)。
理想的搜索方法:可以不经过比较,依次直接从表中直接搜索到指定元素,如果构造一种数据结构,通过某种函数使元素的存储位置与它的关键码之间能够建立----映射关系,就可以很快的查找到指定的元素。
插入元素:根据插入元素的关键码,用函数计算出这个元素的存储位置并存放
查找元素:对元素的关键码进行计算,得到的函数值去取出此位置的存储元素,并把输入的元素与此元素进行比较,若关键码相等,则查找成功
该方式为哈希(散列)方法,哈希方法中的转换函数为哈希函数,构造出来的结构为哈希表

一般是用关键码膜上该结构的总容量,得到的值就为映射后的位置下标。
2.哈希冲突
对于俩个数据元素的关键码通过哈希函数后得到的值一样,不同关键字通过相同哈希函数计算出相同的哈希值地址,该现象称为哈希冲突或哈希碰撞。
3.哈希函数
引起哈希冲突的原因可能:哈希函数设计不够合理
哈希函数设计原则:
哈希函数的定义域必须包括需要存储的全部关键码,而如果散列表允许有m个地址,则值域必须在[0 m-1]之间
哈希函数计算出来的地址能均匀分布在整个空间中
哈希函数形式相对简单
除留余数法
设散列表中允许存储的地址数位m个,取一个不大于m的数p,且p最接近或者等于m的质数作为除数,Hush(key)=key%p(p<m) ,将关键码转换为哈希地址
补充:
key%2^16表示的是取后十六位,然后key>>(32-n)(假设n=16)是把前16位移到后16位,最后把前16位和后16位异或的结果作为哈希值(key的前16位和后16位都到同一位置也就是后16位上了),把key的每一位都参与到计算,这样得出的哈希值冲突会更少一些。

哈希冲突解决
闭散列:也叫开放地址法,当发生哈希冲突时,如果哈希表未被填满,说明哈希表中心必然还有空位置,那么可以把key存放到冲突位置的下一个位置去。
找到空位置
1.线性探测
如下图要插入元素44,先通过哈希函数计算出哈希地址,44%10=4,应在4的位置,但是这个位置已经放了数据了,所以要从发生冲突的位置开始依次向后找,直到寻找到空位置为止

2.删除
采用闭散列处理哈希冲突时,不能随便物理删除哈希表中已有的元素,若直接删除元素会影响其它元素的搜索,比如删除4,那么查找44时根据计算的哈希地址就是4的位置,当44不在4位置在后面。所以通过枚举用标记的方式来删除元素。
enum State
{
EMPTY,
EXIST,
DELETE
};
3.哈希表扩容
散列表的载荷因子定义:a=填入表中的个数/散列表的长度
对于开放定址法, 载荷因子应该限制在0.7~0.8以下,
线性探测优点:实现简单
线性探测缺点:一旦发生哈希冲突,所有的冲突连在一起,容易产生数据堆积,在查找时需要进行多次比较,导致搜索效率降低。
二次探测
线性探测的缺陷是产生冲突的数据堆积到一块,这与其找找的下一个位置有关,从发生冲突的位置向后找空位置可能会发生的问题,二次探测就是为了避免该现象的出现。
hash=hash0+i^2 or hash=hash0+i^2
代码实现
1.枚举定义状态
设置三个状态存在,空,删除
enum State
{EXIST,EMPTY,DELETE
};
2.定义存在哈希表里面的数据
pair模板,first表示键值,second表示值
template<class K,class V>
struct HashData
{pair<K, V> _kv;State _state = EMPTY;
};
3.哈希表的构造
内联函数里面提供的数字就是质数,有28个,这里lower_bound是选一个大于等于n的数字,这里的n也就是哈希表的存储个数,返回处使用了三目操作符,如果不是最后一个就是pos,如果是最后一个就要返回最后一个的前一个。
HashTable():_tables(__stl_next_prime(0)),_n(0)
{}
inline unsigned long __stl_next_prime(unsigned long n)
{// Note: assumes long is at least 32 bits.static const int __stl_num_primes = 28;static const unsigned long __stl_prime_list[__stl_num_primes] = {53, 97, 193, 389, 769,1543, 3079, 6151, 12289, 24593,49157, 98317, 196613, 393241, 786433,1572869, 3145739, 6291469, 12582917, 25165843,50331653, 100663319, 201326611, 402653189, 805306457,1610612741, 3221225473, 4294967291};const unsigned long* first = __stl_prime_list;const unsigned long* last = __stl_prime_list + __stl_num_primes;const unsigned long* pos = lower_bound(first, last, n);return pos == last ? *(last - 1) : *pos;
}4.哈希表的插入
首先要判断插入的元素是否已经存在,接着是判断载荷因子是否超过0.7,这里把_n*10所以和7比较,如果大于7就要扩容了,哈希表扩容则原来的存储位置在新的里面是不一样的,因为之前的存储是旧的size,扩容后是新的size,哈希函数得出的值改变了,所以存储位置要重新计算,这里newht的空间还是去之前的28个里面选,这里+1是因为28个数字对应不同区间,所以只需要加一就会到下一个区间,还要判断旧表每一个位置的状态是否是存在的,说明之前是由元素在这个位置上,则把此处的元素再作为Insert的参数重新插入,最后交换地址,如果没超过0.7,则就正常插入,通过模来得到哈希值,然后还要线性检测是否此位置为空位置,while循环后就找到了空位置,则插入并改变状态为存在,并把已经存储的个数n++。
bool Insert(const pair<K, V>& kv)
{if (Find(kv.first))return false;if (_n * 10 / _tables.size() >= 7){HashTable<K, V> newht;newht._tables.resize(__stl_next_prime(_tables.size() + 1));for (auto& data : _tables){if (data._state == EXIST){newht.Insert(data._kv);}}_tables.swap(newht._tables);}size_t hash0 = kv.first % _tables.size();size_t hashi = hash0;size_t i = 1;int flag = 1;while (_tables[hashi]._state == EXIST){hashi = (hash0 + i) % _tables.size();++i;///二次探测////// hashi=(hash0+(i*i*flag))%_tables.size();/// ///}_tables[hashi]._kv = kv;_tables[hashi]._state = EXIST;++_n;return true;}5.哈希表的查找
这里查找需要注意的是位置被占了,可能在哈希函数得出的值的后面或者前面,先得到要查找的键的哈希值,然后用循环来寻找,先看是否为空,空说明不存在,如果不为空还要判断键值是否一样,不一样就线性检测去遍历,找到就返回此处的地址。
HashData<K, V>* Find(const K& key)
{size_t hash0 = key % _tables.size();size_t hashi = hash0;size_t i = 1;while (_tables[hashi]._state != EMPTY){if (_tables[hashi]._state == EXIST && _tables[hashi]._kv.first == key){return &_tables[hashi];}hashi = (hash0 + i) % _tables.size();++i;}return nullptr;
}6.哈希表的删除
前面已经提到不能删除,只改变状态为删除状态就行,先用Find去找到指定位置,判断是否找到,找到就只改变状态变量。
bool Erase(const K& key)
{HashData<K, V>* ret = Find(key);if (ret){ret->_state = DELETE;return true;}else{return false;}
}总代码
HashTable.h
#pragma once#include<vector>enum State
{EXIST,EMPTY,DELETE
};template<class K,class V>
struct HashData
{pair<K, V> _kv;State _state = EMPTY;
};template<class K,class V>
class HashTable
{
public:HashTable():_tables(__stl_next_prime(0)),_n(0){}inline unsigned long __stl_next_prime(unsigned long n){// Note: assumes long is at least 32 bits.static const int __stl_num_primes = 28;static const unsigned long __stl_prime_list[__stl_num_primes] = {53, 97, 193, 389, 769,1543, 3079, 6151, 12289, 24593,49157, 98317, 196613, 393241, 786433,1572869, 3145739, 6291469, 12582917, 25165843,50331653, 100663319, 201326611, 402653189, 805306457,1610612741, 3221225473, 4294967291};const unsigned long* first = __stl_prime_list;const unsigned long* last = __stl_prime_list + __stl_num_primes;const unsigned long* pos = lower_bound(first, last, n);return pos == last ? *(last - 1) : *pos;}bool Insert(const pair<K, V>& kv){if (Find(kv.first))return false;if (_n * 10 / _tables.size() >= 7){HashTable<K, V> newht;newht._tables.resize(__stl_next_prime(_tables.size() + 1));for (auto& data : _tables){if (data._state == EXIST){newht.Insert(data._kv);}}_tables.swap(newht._tables);}size_t hash0 = kv.first % _tables.size();size_t hashi = hash0;size_t i = 1;int flag = 1;while (_tables[hashi]._state == EXIST){hashi = (hash0 + i) % _tables.size();++i;///二次探测////// hashi=(hash0+(i*i*flag))%_tables.size();/// ///}_tables[hashi]._kv = kv;_tables[hashi]._state = EXIST;++_n;return true;}HashData<K, V>* Find(const K& key){size_t hash0 = key % _tables.size();size_t hashi = hash0;size_t i = 1;while (_tables[hashi]._state != EMPTY){if (_tables[hashi]._state == EXIST && _tables[hashi]._kv.first == key){return &_tables[hashi];}hashi = (hash0 + i) % _tables.size();++i;}return nullptr;}bool Erase(const K& key){HashData<K, V>* ret = Find(key);if (ret){ret->_state = DELETE;return true;}else{return false;}}private:vector<HashData<K, V>> _tables;size_t _n;
};
test.c
#define _CRT_SECURE_NO_WARNINGS 1#include<iostream>
#include<set>
#include<unordered_set>using namespace std;
#include"HashTable.h"
int main()
{//int a[] = { 19,30,52,63,11,22 };int a[] = { 19,30,5,36,13,20,21,12 };HashTable<int, int> ht;for (auto e : a){ht.Insert({ e, e });}//ht.Insert({ 15, 15 });ht.Erase(30);if (ht.Find(20)){cout << "找到了" << endl;}if (ht.Find(30)){cout << "找到了" << endl;}else{cout << "没有找到" << endl;}return 0;
}相关文章:
C++哈希(一)
1.底层结构 顺序结构以及平衡中,元素关键码与其存储位置之间没有相对应的关系,因此在查找一个元素时,要经过关键码的多次比较。顺序查找的时间复杂度为O(N)。 理想的搜索方法:可以不经过比较,依次直接从表中直接搜索…...

阿拉丁论文助手:一键点亮学术之路
在学术研究的海洋中,每一位学者都渴望拥有一盏能够照亮前行道路的神灯。阿拉丁论文助手,正是这样一盏神奇的灯,它以其先进的人工智能技术和丰富的学术资源,为学者们的学术写作提供了全方位的支持。 一、阿拉丁论文助手简介 阿拉丁…...

视频码率到底是什么?详细说明
视频码率(Video Bitrate)是指在单位时间内(通常是每秒)传输或处理的视频数据量,用比特(bit)表示。它通常用来衡量视频文件的压缩程度和质量,码率越高,视频质量越好&#…...

嵌入式学习(17)-stm32F407串口使用注意事项
一、概述 配置串口时串口的接收一直不好使,对比例程发现了问题: 在网上也找了一些资料供参考“STM32F4的串口RX引脚不能被设置为输入是因为串口的接收(RX)功能是由硬件电路实现的,无法通过软件配置来控制。串口接收功…...

汽车48V电气系统
汽车48V电气系统 汽车48V电气系统汽车48V电气系统设计汽车48V电气系统测试汽车48V系统是48V供电和12V供电共存的么?48V供电系统是如何与12V供电系统共存的?48V电气系统测试的难点有哪些?在汽车48V电气系统通信测试中,如何向12V的控制器和48V的控制器供电?汽车48V电气系统通…...

【人工智能基础05】决策树模型习题
文章目录 1. 归一化对决策树的影响2. 选择决策树模型3. 决策树计算4. 基尼系数的优势5. 在叶子上使用线性模型的优缺点 1. 归一化对决策树的影响 题目:对于一些机器学习模型(例如,神经网络),对特征进行归一化(normaliz…...

rockit 学习、开发笔记(六)(VENC)
前言 上节我们讲到了VDEC解码模块,那当然少不了VENC编码模块了,一般有编解码的需求都是为了压缩视频的大小,方便减少传输所占用的带宽。 概述 VENC 模块,即视频编码模块。本模块支持多路实时编码,且每路编码独立&am…...

spring技术点
引入对象 Autowired 和 Resource的区别 Autowired 和 Resource的区别 valid 参数校验 jarkata进行SpringMVC校验 常规当前进行校验的配置操作,参考文档如下进行操作。 SpringMVC校验注解不生效 List类型参数校验 由于list类型默认不能进行标注校验实现&#x…...

R语言使用“纽约市数据集中的优步皮卡”数据创建不同年度时间范围的可视化
一、项目背景 为了分析纽约市优步(https://baike.baidu.com/item/Uber/14900884)皮卡在不同年度的使用情况,需要利用R语言进行数据可视化。通过对比不同年度的数据,可以揭示出优步皮卡使用的趋势和变化。 二、数据准备 数据集&a…...

电阻计RM3544、RM3545的使用
目录: 一、电阻计与PC通讯 1、硬件连接 2、RmLogger.exe的使用 二、RM3545测量35uΩ电阻 一、电阻计与PC通讯 1、硬件连接 可以设置USB或COM口(串口)连接PC,也可以设置为“打印”输出。 1)使用USB连接PC 2)使用串口连接PC …...

Unity 策略游戏地图上的网格是如何实现的
在Unity中实现策略游戏地图上的网格,主要涉及到地图数据的处理、地图的加载与渲染、以及玩家在地图上的移动与碰撞检测等关键步骤。以下是对这些步骤的详细解释: 一、地图数据的处理 收集地图数据:这包括地形高度、地形纹理、建筑物、树木等…...

《鸟哥的Linux私房菜基础篇》---4 Linux档案的压缩与打包
目录 一、常见的压缩包的扩展名 二、常见的压缩和解压指令 1、tar 2、tar gzip(.tar.gz) (或 .tgz) 3、tar bzip2(.tar.bz2) 4、zip 5、gzip 6、bzip2 7、xz 8、rar 9、7z 三、安装解压工具 一、常见的压缩包的扩展…...

Springboot 2.7+解决跨域问题,到底是在SpringBoot中添加拦截器还是修改Nginx配置
文章目录 1摘要2 核心代码2.1 SpringBoot 全局跨域拦截器2.2 Nginx 配置跨域处理2.3 Nginx 和 SpringBoot 同时添加允许跨域处理会怎么样? 3 推荐参考资料 1摘要 跨域问题报错信息: Referrer Policy:strict-origin-when-cross-origin跨域问题是在前后端分离的情况…...

Spring中Bean的作用域深入剖析与技术实践
前言 Spring框架作为Java企业级应用开发中的中流砥柱,提供了强大的依赖注入(DI)和面向切面编程(AOP)等功能。在Spring框架中,Bean的作用域(Scope)是一个非常重要的概念,…...
)
Python爬虫实战:抓取拼多多商品详情数据(基于pdd.item_get接口)
在当前的电商市场中,拼多多以其独特的拼团模式和优惠价格吸引了大量用户,成为继淘宝、京东之后的又一大电商平台。对于数据分析和市场研究者来说,获取拼多多的商品详情数据显得尤为重要。本文将介绍如何使用Python爬虫技术,通过调…...

工具类-列表请求工具 useList
useList 用于列表请求的基于 vue 3 的 hooks,接收请求函数、请求参数等数据,自动生成请求请求函数,分页信息等 本文有涉及到 http 请求工具和接口返回格式的内容: http 工具:一个基于 axios 封装的请求工具Response…...

Scala中的正则表达式01
规则类型具体规则示例说明单字符大多数字符匹配自身正则表达式 abc,文本 abca 匹配 a,b 匹配 b,c 匹配 c方括号 [ ][ ] 定义字符集,匹配其一[abc],文本 a、b 或 c[abc] 匹配 a、b 或者 c排除字符集 [^ ][^ ] 开头加 ^&…...

基于SpringBoot的养老院管理系统的设计与实现
一、前言 随着人口老龄化的加剧,养老院作为老年人养老的重要场所,其管理的高效性和科学性显得尤为重要。传统的养老院管理方式多依赖人工操作,存在信息记录不及时、不准确,管理流程繁琐,资源调配困难等问题。利用信息技…...
)
Ansible变量详解(变量定义+变量优先级+变量注册+层级定义变量+facts缓存变量)
本篇文章详细给大家介绍Ansible变量,变量适合管理剧本中每个项目的动态值,或是某些值在多个地方重复使用,如果将此值设置为变量再在其他地方调用会方便许多。会用变量,才算真正会用Ansible,话不多说,直接开…...

面向对象系统的分析和设计
来源:《设计模式精解-GOF23种设计模式解析》 作者:k_eckel k_eckels mindview - 博客园 (cnblogs.com) --------- 面向对象系统的分析和设计实际上追求的就是两点: (1)高内聚 (2)低耦合 …...
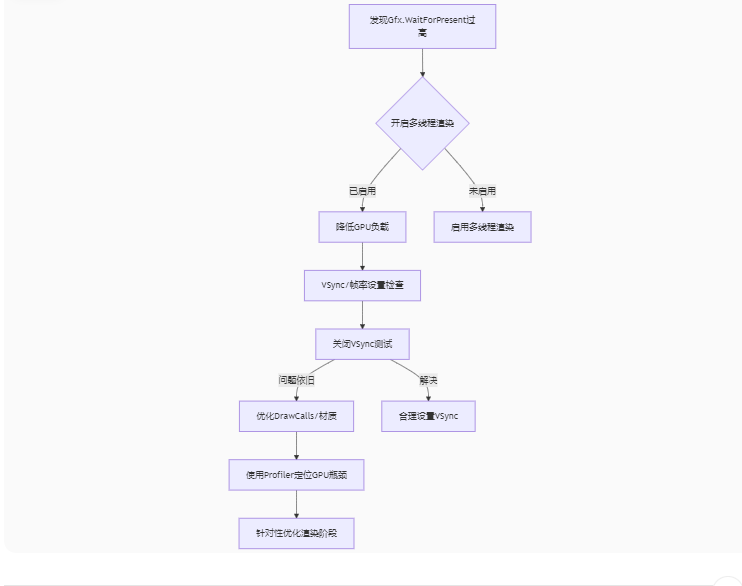
Unity3D中Gfx.WaitForPresent优化方案
前言 在Unity中,Gfx.WaitForPresent占用CPU过高通常表示主线程在等待GPU完成渲染(即CPU被阻塞),这表明存在GPU瓶颈或垂直同步/帧率设置问题。以下是系统的优化方案: 对惹,这里有一个游戏开发交流小组&…...
)
Spring Boot 实现流式响应(兼容 2.7.x)
在实际开发中,我们可能会遇到一些流式数据处理的场景,比如接收来自上游接口的 Server-Sent Events(SSE) 或 流式 JSON 内容,并将其原样中转给前端页面或客户端。这种情况下,传统的 RestTemplate 缓存机制会…...

为什么需要建设工程项目管理?工程项目管理有哪些亮点功能?
在建筑行业,项目管理的重要性不言而喻。随着工程规模的扩大、技术复杂度的提升,传统的管理模式已经难以满足现代工程的需求。过去,许多企业依赖手工记录、口头沟通和分散的信息管理,导致效率低下、成本失控、风险频发。例如&#…...

linux 错误码总结
1,错误码的概念与作用 在Linux系统中,错误码是系统调用或库函数在执行失败时返回的特定数值,用于指示具体的错误类型。这些错误码通过全局变量errno来存储和传递,errno由操作系统维护,保存最近一次发生的错误信息。值得注意的是,errno的值在每次系统调用或函数调用失败时…...

2025盘古石杯决赛【手机取证】
前言 第三届盘古石杯国际电子数据取证大赛决赛 最后一题没有解出来,实在找不到,希望有大佬教一下我。 还有就会议时间,我感觉不是图片时间,因为在电脑看到是其他时间用老会议系统开的会。 手机取证 1、分析鸿蒙手机检材&#x…...

(转)什么是DockerCompose?它有什么作用?
一、什么是DockerCompose? DockerCompose可以基于Compose文件帮我们快速的部署分布式应用,而无需手动一个个创建和运行容器。 Compose文件是一个文本文件,通过指令定义集群中的每个容器如何运行。 DockerCompose就是把DockerFile转换成指令去运行。 …...

selenium学习实战【Python爬虫】
selenium学习实战【Python爬虫】 文章目录 selenium学习实战【Python爬虫】一、声明二、学习目标三、安装依赖3.1 安装selenium库3.2 安装浏览器驱动3.2.1 查看Edge版本3.2.2 驱动安装 四、代码讲解4.1 配置浏览器4.2 加载更多4.3 寻找内容4.4 完整代码 五、报告文件爬取5.1 提…...

Golang——6、指针和结构体
指针和结构体 1、指针1.1、指针地址和指针类型1.2、指针取值1.3、new和make 2、结构体2.1、type关键字的使用2.2、结构体的定义和初始化2.3、结构体方法和接收者2.4、给任意类型添加方法2.5、结构体的匿名字段2.6、嵌套结构体2.7、嵌套匿名结构体2.8、结构体的继承 3、结构体与…...

使用SSE解决获取状态不一致问题
使用SSE解决获取状态不一致问题 1. 问题描述2. SSE介绍2.1 SSE 的工作原理2.2 SSE 的事件格式规范2.3 SSE与其他技术对比2.4 SSE 的优缺点 3. 实战代码 1. 问题描述 目前做的一个功能是上传多个文件,这个上传文件是整体功能的一部分,文件在上传的过程中…...
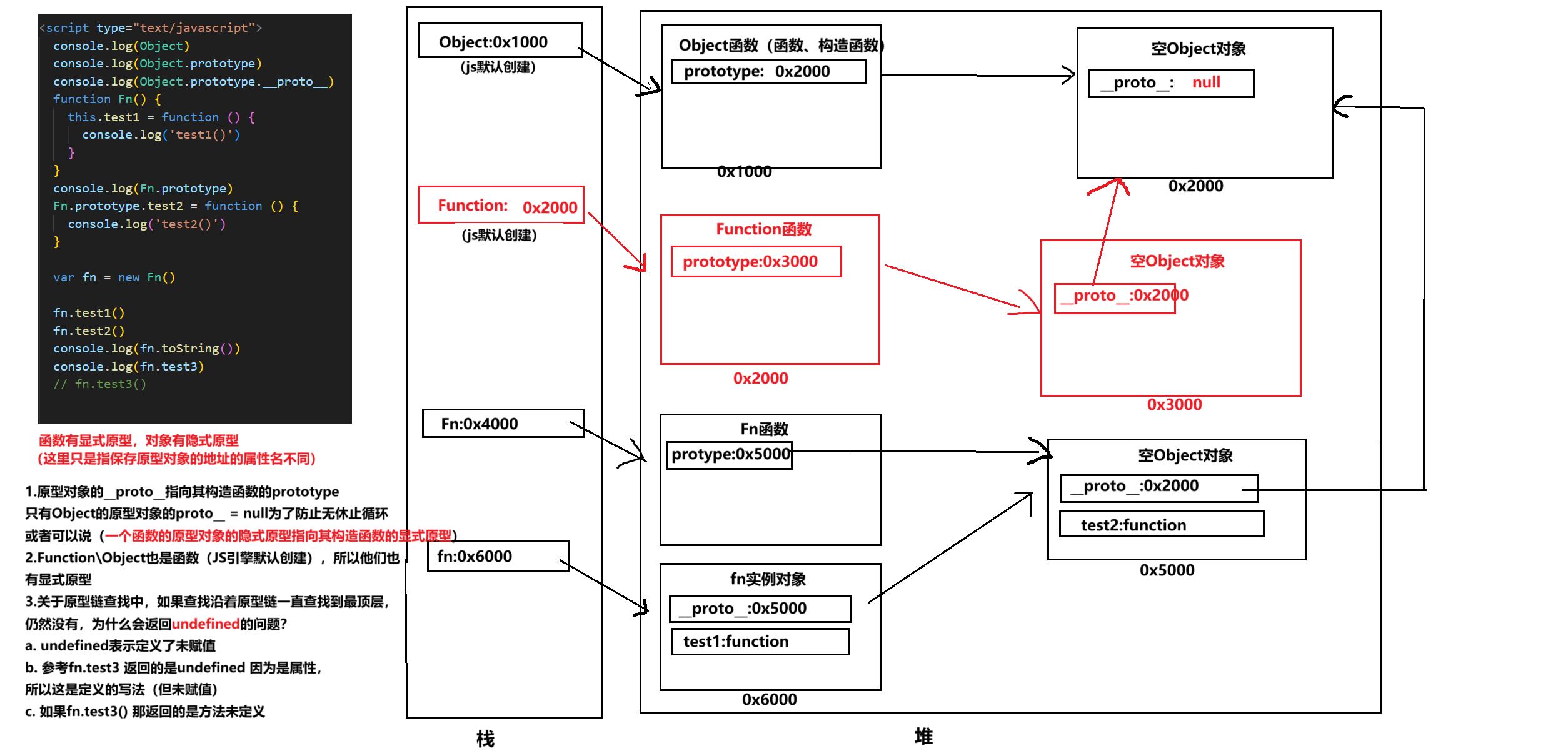
图解JavaScript原型:原型链及其分析 | JavaScript图解
忽略该图的细节(如内存地址值没有用二进制) 以下是对该图进一步的理解和总结 1. JS 对象概念的辨析 对象是什么:保存在堆中一块区域,同时在栈中有一块区域保存其在堆中的地址(也就是我们通常说的该变量指向谁&…...