24/12/9 算法笔记<强化学习> PPO,DPPO
PPO是目前非常流行的增强学习算法,OpenAI把PPO作为目前baseline算法,首选PPO,可想而知,PPO可能不是最强的,但是是最广泛的。
PPO是基于AC架构,因为AC架构有一个好处,就是解决了连续动作空间的问题。
AC输出连续动作
什么是连续动作呢,也就是不仅有动作,而且还有动作的力度大小的概念,就像开车,不仅有方向还要控制油门踩多深,刹车踩多少,转向多少的问题,离散动作是可数的,连续是不可数的。
On-Policy和Off-Policy
例如PG就是一个在线策略,因为PG用于产生数据的策略,和需要更新的策略是一致的。
而DQN是一个离线策略,简而言之就是可以运用之前的数据来更新。
但为什么PG和AC中的Actor更新不能像DQN一样,把数据存起来,更新多次呢?
答案是在一定条件下可以。PPO就是做这个工作的,在了解什么情况下可以的时候,我们先来了解下,为什么不能。

假设我们在一个已知环境下,有两个动作可以选择。现在两个策略,分别是P:[0.5,0.5]和B:[0.1,0.9]
现在我们按照两个策略,进行采样,也就是分别按照这两个策略,以S这套下出发,与环境进行10次互动。获得如图数据,那么,我们可以用B策略下获得的数据,更新P吗?
答案是不行,回顾一下PG算法,PG算法会按照TD-error作为权重,更新策略。权重越大,更新幅度越大,权重越小,更新幅度越小。
Important sampling
那么PPO是怎么做到离线更新策略的呢?答案是Important-sampling,重要性采样技术,如果我们想用策略B抽样出来的数据来更新策略P也不是不可以,但是我们要把TD-error乘以一个重要性权重IW(importance weight)。
IW = P(a) / B(a)
回到我们之前的例子,我们可以计算出,每个动作的重要性权重,P:[0.5,0.5]和B:[0.1,0.9]:
IWa1 = P/B = 0.5/0.1 = 5
IWa2 = P/B = 0.5/0.9 = 0.55
New TD error for a1 = 5 * 1.5 = 7.5
New TD error fot a2 = 0.55 * 1 = 0.55
我们把重要性权重乘以TD-error,我们发现,a1的TD-error大幅度提升,而a2 的TD-error减少了,现在即使我们用P策略:[0.5,0.5]进行更新,a1提升的概率也会比a2 的更多。
PPO应用了importance sampling,使得我们用行为策略获取的数据,能够更新目标策略,把AC从在线策略,变成离线策略。
那么我们为什么可以这样做呢?
回想PG

其实可以把它理解为是在求一个期望,通过不断的sample然后求平均去近似期望值


因为我们的经验数据中有很多模型的经验数据,比如B策略的这个经验数据
如果我们不能从p来sample,只能从q来sample,做一下变换。

Importance sampling的问题
同学们都清楚,比如两个正态分布的期望一样,但是只要是
不同,就是不一样的正态分布,所以我们上面即使乘上了importance weight对q的期望
进行了修正,但是方差也是不同的
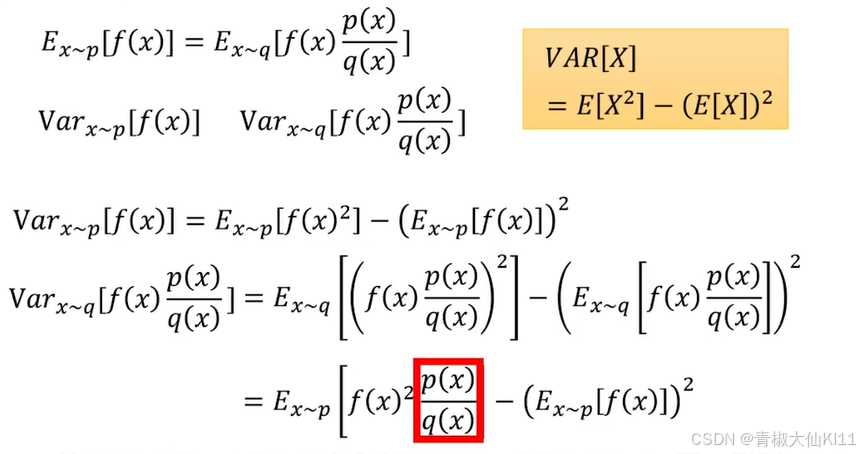
所以结论就是由于修正后期望是一样的,但是方差公式不同,假设我们对p和q采样sample的次数足够多,它们会是一样的,原因是期望;但是当sample次数不够多时,由于方差不一样,方差差距越大,那么sample就有可能得到非常大的差距。
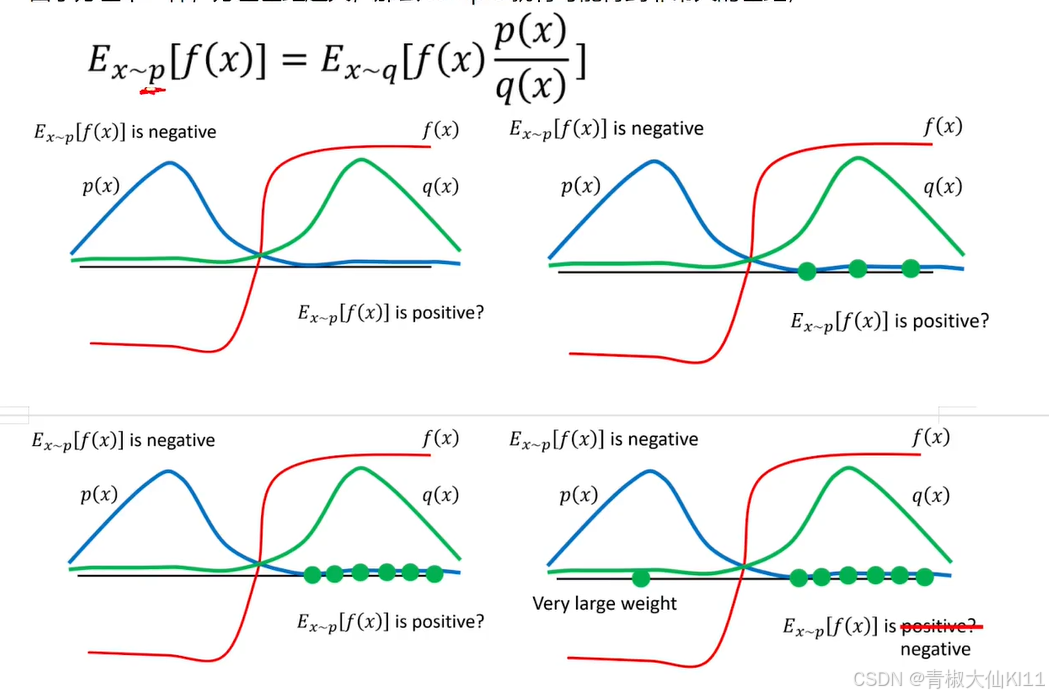
Add Constraint
当两个分布差距太大的时候,就会有问题,于是我们还得限制两个分布差距不能太大
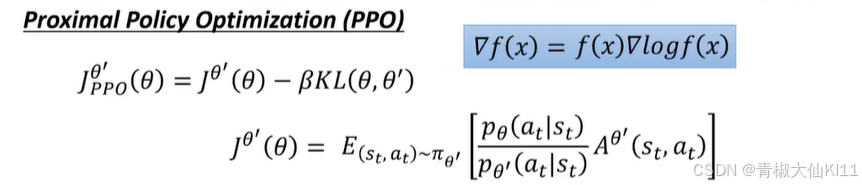
在PPO1里面,用了是KL散度(相对熵)来衡量两个分布的差距,作为一个惩罚项来出现,KL散度是一种衡量两个概率分布的匹配程度的指标,两个分布差异越大,KL散度越大。
注意的是,这里KL计算的还真不是参数上面的距离,而是参数使得行为action表现上面的距离,也就是策略的距离。策略就是action上面的几率分布。
是可以动态调整的:

TRPO

将KL散度当成一个约束条件。
PPO2
PPO2简单粗暴,直接裁剪了更新范围,但是这种方法却出乎意料地好
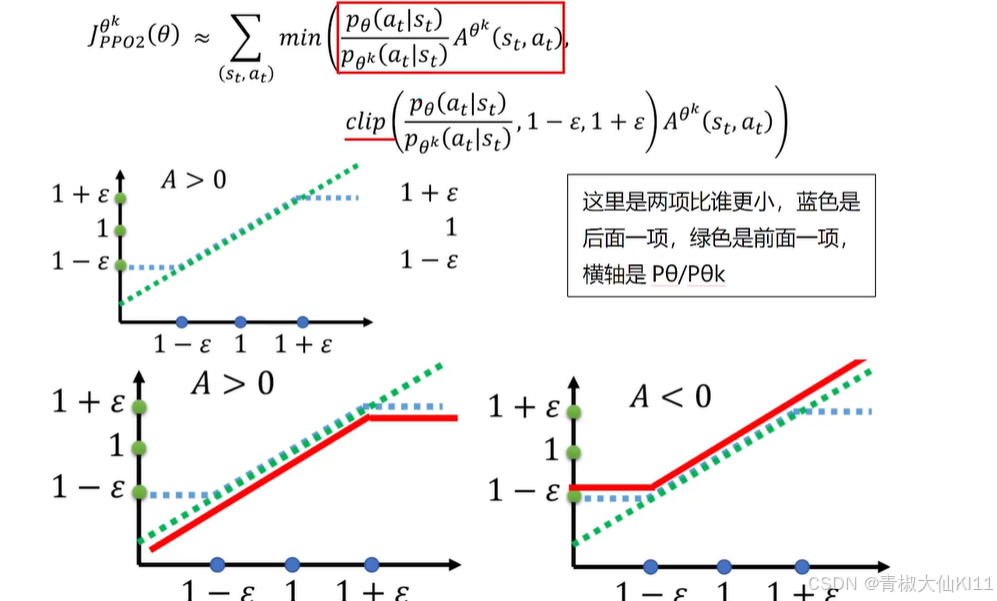
为什么这样限制就ok了呢?因为当A>0时,一定是(st,at)是好的,那么我们就希望P(st,st)变大,回头训练调参就会使得P
/ P
K变大,但是如果不断训练变得太大,他们就不相似了,那么constraint限制住它们的比例不能超过1-
,反而亦然。
代码实现以及核心
动作采样(PPO类的get_action方法)
def get_action(self, state):state = torch.from_numpy(state).float().unsqueeze(0)dist = self.policy(state)action = dist.sample()return action.item(), dist.log_prob(action)将处理后的状态输入到策略网络(self.policy,即 PolicyNetwork 类的实例)中,策略网络输出一个动作的概率分布,然后从这个概率分布中采样出一个动作,同时返回这个动作以及对应的对数概率。对数概率在后续计算策略更新时会用到,它用于衡量当前策略产生这个动作的可能性大小。
优势函数估计(PPO类的update方法中相关部分)
# 计算优势函数估计
returns = []
Gt = 0
for r, d in zip(reversed(rewards), reversed(dones)):Gt = r + self.gamma * Gt * (1 - d)returns.insert(0, Gt)
returns = torch.stack(returns)values = self.value(states)
advantages = returns - values.detach()- 回报(
returns)计算:按照时间步从后往前遍历每一步的即时奖励(rewards)和是否结束(dones)标志。通过动态规划的思想,利用折扣因子(gamma)来累计计算从当前时间步到最终时间步的折扣奖励总和,也就是回报Gt。例如,最后一步的回报就是最后一步的即时奖励,如果不是最后一步,则回报等于当前即时奖励加上下一个时间步回报乘以折扣因子(如果下一个时间步未结束)。最后将计算好的每一步回报组成一个张量returns。
- 优势函数计算:使用价值网络(
self.value,即ValueNetwork类的实例)对每个状态估计其价值(values = self.value(states)),这个估计的价值可以理解为从该状态开始按照当前策略后续能获得的期望奖励。然后用计算得到的回报returns减去价值网络估计的价值(这里要使用detach分离梯度,因为在计算优势函数时不希望价值网络的梯度传播影响到后续对回报的计算等),得到的差值advantages就是优势函数,它反映了在某个状态下采取某个动作相较于平均水平的好坏程度,是后续策略更新的关键依据。
策略更新(PPO类的update方法中相关部分)
dist = self.policy(states)
log_probs = dist.log_prob(actions.squeeze())
ratio = torch.exp(log_probs - old_log_probs.squeeze())
surr1 = ratio * advantages
surr2 = torch.clamp(ratio, 1 - self.clip_eps, 1 + self.clip_eps) * advantages
actor_loss = -torch.min(surr1, surr2).mean()
self.optimizer_actor.zero_grad()
actor_loss.backward()
self.optimizer_actor.step() 首先将当前收集到的一系列状态(states)再次输入策略网络得到新的动作概率分布(dist),并计算出当前策略下对应之前所采取动作(actions)的对数概率(log_probs),然后和之前记录的旧策略下这些动作的对数概率(old_log_probs)相比较,计算出概率比率 ratio(通过指数运算得到新旧概率的比率)。接着,根据这个比率和优势函数计算出两个替代目标函数 surr1 和 surr2,其中 surr2 是对 ratio 进行了裁剪(clip)操作后的结果,限制策略更新的幅度,避免过大的策略更新导致性能变差,这是 PPO 算法的关键技巧之一。
取 surr1 和 surr2 中的较小值作为最终的策略损失(actor_loss),这样可以保证策略更新朝着让策略更好的方向进行,同时又有一定的约束。然后通过清空梯度(zero_grad)、反向传播(backward)和执行一步优化器更新(step)来更新策略网络的参数,使得策略网络朝着更优的方向调整。
DPPO
DPPO 是在深度确定性策略梯度(DDPG)算法基础上结合 PPO 的一些思想发展而来的。DDPG 主要用于处理连续动作空间的问题,它使用深度神经网络来逼近策略函数和价值函数。
和A3C一样,DPPO是希望多个智能体同时和环境互动,并对全局的PPO网络更新。
在A3C,我们需要跑数据并且计算好梯度,再更新全局网络。这是因为AC是一个在线的算法,所以在更新的时候,产生的数据和更新的策略需要同一个网络,所以我们不能把worker阐述的数据,直接给全局网络计算梯度使用。
但PPO解决了离线更新的问题,所以DPPO的worker只需要提供数据给全局网络,由全局网络从数据中直接学习。
但是这两项工作是不能同时的,当全局网络在学习的时候,workers需要等待全局网络学习完,才能干活,workers在干活的时候,全局网络就需要等待worker提供数据。
关键代码
select_action 方法
def select_action(self, state):state = torch.FloatTensor(state).unsqueeze(0)action = self.actor(state).detach().numpy()[0]return action该方法用于根据当前策略网络(Actor),给定一个状态来选择相应的动作,是智能体与环境交互过程中每次选择动作的关键操作,它将状态转换为网络输入的张量格式,经过策略网络计算后得到动作并转换为 numpy 数组返回,以便能在环境中执行该动作。
update 方法
def update(self):if len(self.memory) < self.batch_size:returnsamples = random.sample(self.memory, self.batch_size)states, actions, rewards, next_states, dones = zip(*samples)states = torch.FloatTensor(states)actions = torch.FloatTensor(actions).unsqueeze(1)rewards = torch.FloatTensor(rewards).unsqueeze(1)next_states = torch.FloatTensor(next_states)dones = torch.FloatTensor(dones).unsqueeze(1)# 计算目标价值target_values = rewards + (1 - dones) * self.gamma * self.critic(next_states)# 更新价值网络values = self.critic(states)critic_loss = nn.MSELoss()(values, target_values.detach())self.critic_optimizer.zero_grad()critic_loss.backward()self.critic_optimizer.step()# 计算优势函数估计值advantages = target_values - values.detach()# 计算旧策略的动作概率old_action_probs = self.actor(states).gather(1, actions.long())# 计算新策略的动作概率new_action_probs = self.actor(states)ratio = (new_action_probs / (old_action_probs + 1e-10)).gather(1, actions.long())# 计算PPO的裁剪损失surr1 = ratio * advantagessurr2 = torch.clamp(ratio, 1 - self.eps_clip, 1 + self.eps_clip) * advantagesactor_loss = -torch.min(surr1, surr2).mean()# 更新策略网络self.actor_optimizer.zero_grad()actor_loss.backward()self.actor_optimizer.step()update方法是整个DPPO算法的核心训练逻辑所在。它从经验回放缓冲区(memory)中采样一批数据,先基于这批数据计算目标价值来更新价值网络(Critic),然后通过计算优势函数估计值、新旧策略的动作概率等,进而计算策略网络(Actor)的裁剪损失,最终实现对策略网络和价值网络的更新优化,使得智能体能够不断改进其策略以获得更多奖励。
DDPO和PPO的区别
基本区别
PPO: 它主要是为了解决传统策略梯度方法(如 A2C、A3C)在更新策略时样本效率较低和训练不稳定的问题,通过限制新策略和旧策略之间的差异来提高训练效率。
DPPO: 它更像是深度确定性策略梯度(DDPG)算法与 PPO 思想的结合。DPPO 主要用于连续动作空间的强化学习问题,而 PPO 可以用于离散和连续动作空间。
动作空间适用性差异
PPO: 通用性较强,能够很好地处理离散动作空间问题。
DPPO: 主要是为连续动作空间设计的。
策略更新方式差异
PPO: 最常见的是PPO-clip。它通过裁剪目标函数中的概率比(新旧策略下动作概率的比值)来限制新策略和旧策略的差异。具体来说,定义一个裁剪参数,计算新旧策略的概率比
 ,然后通过
,然后通过
来更新策略,其中![]() 是优势函数估计值。
是优势函数估计值。
DPPO: 策略更新结合了 DDPG 的一些特点。在 DDPG 中,策略网络(Actor)的更新是基于策略梯度定理,通过最大化累计奖励的期望来更新。DPPO 在这个基础上,类似于 PPO,会采取措施保证策略更新的稳定性。例如,它会利用经验回放等机制,在更新 Actor 网络时,考虑 Critic 网络评估的状态价值变化以及策略网络输出动作的变化,同时限制策略变化的幅度。
网络架构差异
PPO采用A-C架构
DPPO继承了DPPG的网络架构特点,有一个Actor网络用于输出连续动作,一个Critic网络用于评估状态价值。
相关文章:

24/12/9 算法笔记<强化学习> PPO,DPPO
PPO是目前非常流行的增强学习算法,OpenAI把PPO作为目前baseline算法,首选PPO,可想而知,PPO可能不是最强的,但是是最广泛的。 PPO是基于AC架构,因为AC架构有一个好处,就是解决了连续动作空间的问…...
Linux下编译安装METIS
本文记录Linux下编译安装METIS的流程。 零、环境 操作系统Ubuntu 22.04.4 LTSVS Code1.92.1Git2.34.1GCC11.4.0CMake3.22.1 一、安装依赖 1.1 下载GKlib sudo apt-get install build-essential sudo apt-get install cmake 2.2 编译安装GKlib 下载GKlib代码, …...

【数据库】关系代数和SQL语句
一 对于教学数据库的三个基本表 学生S(S#,SNAME,AGE,SEX) 学习SC(S#,C#,GRADE) 课程(C#,CNAME,TEACHER) (1)试用关系代数表达式和SQL语句表示:检索WANG同学不学的课程号 select C# from C where C# not in(select C# from SCwhere S# in…...

amazon亚马逊滑动识别验证码
注意,本文只提供学习的思路,严禁违反法律以及破坏信息系统等行为,本文只提供思路 如有侵犯,请联系作者下架 本文识别已同步上线至OCR识别网站: http://yxlocr.nat300.top/ocr/other/15 亚马逊的滑动还原验证码数据集如下: 和某顶象的差不多,图片分割高度是中间固定的,…...

Android Studio 创建虚拟设备的详细图文操作教程
本篇文章主要讲解 Android Studio 创建模拟器详细图文操作,包含了每一步的详细操作,便于理解和掌握对模拟的创建。 日期:2024年12月9日 作者:任聪聪 运行效果: 说明:创建运行后,点击右侧如下图…...

网络安全法-附则
第七章 附 则 第七十六条 本法下列用语的含义: (一)网络,是指由计算机或者其他信息终端及相关设备组成的按照一定的规则和程序对信息进行收集、存储、传输、交换、处理的系统。 (二)网络安全ÿ…...
)
CSS核心(上)
CSS 介绍 层叠样式表(英语:Cascading Style Sheets, 缩写:CSS; 又叫串样式列表,级联样式表,串接样式表,阶层式样式表)是一种用来为结构化文档(HTML或XML应用)添加样式(…...

深度学习常用损失函数介绍
均方差损失(Mean Square Error,MSE) 均方误差损失又称为二次损失、L2损失,常用于回归预测任务中。均方误差函数通过计算预测值和实际值之间距离(即误差)的平方来衡量模型优劣。即预测值和真实值越接近&…...

HarmonyOS-中级(四)
文章目录 Native适配开发三方库的基本使用 🏡作者主页:点击! 🤖HarmonyOS专栏:点击! ⏰️创作时间:2024年12月09日11点12分 Native适配开发 Node-API HarmonyOS Node-API 是 HarmonyOS 提供的…...

React v19稳定版发布12.5
🤖 作者简介:水煮白菜王 ,一位资深前端劝退师 👻 👀 文章专栏: 前端专栏 ,记录一下平时在博客写作中,总结出的一些开发技巧✍。 感谢支持💕💕💕 目…...

【毕业设计选题】深度学习类毕业设计选题参考 开题指导
目录 前言 毕设选题 开题指导建议 更多精选选题 选题帮助 最后 前言 大家好,这里是海浪学长毕设专题! 大四是整个大学期间最忙碌的时光,一边要忙着准备考研、考公、考教资或者实习为毕业后面临的升学就业做准备,一边要为毕业设计耗费大量精力。学长给大家整…...

NanoLog起步笔记-4-Server端的两个线程
nonolog起步笔记-4-Server端的两个线程 Server端的两个线程两个线程的角色与各自的职责RuntimeLogger::compressionThreadMain线程 详细学习一下相关的代码第三个线程第一次出现原位置swip buffer Server端的两个线程 如前所述,nanolog的server端,相对而…...

linux zookeeper安装并服务化
1.版本信息 系统:centos7.6 java版本:java 8(已经安装好) zookeeper版本:3.6.3 2.zookeeper安装并测试 1.上传文件至指定目录并解压 切换至cd downloads 目录下, rz上传文件 解压:tar -zxvf apache-zookeeper-3.…...

很简单,但是很实用。把docker run改写成docker compose。
很简单,但是很实用。把docker run改写成docker compose。 在Docker的世界里,docker run命令是启动容器最直接的方式之一。然而,当项目复杂度增加,涉及多个服务时,管理这些容器和服务之间的依赖关系就会变得繁琐。这时,使用Docker Compose来定义和运行多容器Docker应用就…...

DAMODEL丹摩|丹摩平台:AI时代的开发者福音
本文仅对丹摩平台进行介绍,非广告。 文章目录 1. 丹摩平台简介2. 平台特性2. 1 超友好的用户体验2. 2 资源丰富的GPU覆盖2. 3 强大的性能2. 4 超实惠的价格2. 5 不同目的推荐的配置2. 6 启动环境 3. 快速上手丹摩平台3. 1 创建项目与资源实例3. 2 储存选项3. 3 数据…...

全面解析租赁小程序的功能与优势
内容概要 租赁小程序正在逐渐改变人与物之间的互动方式。通过这些小程序,用户不仅可以轻松找到所需的租赁商品,还能够享受无缝的操作体验。为了给大家一个清晰的了解,下面我们将重点介绍几个核心功能。 建议:在选择租赁小程序时&…...

VRRP的知识点总结及实验
1、VRRP VRRP(Virtual Router Redundancy Protocol,虚拟路由器冗余协议)既能够实现网关的备份,又能解决多个网关之间互相冲突的问题,从而提高网络可靠性。 2、VRRP技术概述: 通过把几台路由设备联合组成一台虚拟的“路由设备”…...

商业银行基于容器云的分布式数据库架构设计与创新实践
导读 本文介绍了某商业银行基于 TiDB 和 Kubernetes(简称 K8s) 构建的云化分布式数据库平台,重点解决了传统私有部署模式下的高成本、低资源利用率及运维复杂等问题。 通过引入 TiDB Operator 自动化管理与容器化技术,银行能够实现多个业务系统的高可用…...

2025计算机毕设选题推荐【30条选题】【基础功能+创新点设计】
✅博主介绍:CSDN毕设辅导博主、CSDN认证 Java领域优质创作者 ✅技术范围:主要包括Java、Vue、Python、爬虫、小程序、安卓app、大数据、机器学习等设计与开发。 ✅主要内容:免费功能设计、开题报告、任务书、功能实现、代码编写、论文编写和…...

SpringBoot+OSS文件(图片))上传
SpringBoot整合OSS实现文件上传 以前,文件上传到本地(服务器,磁盘),文件多,大,会影响服务器性能 如何解决? 使用文件服务器单独存储这些文件,例如商业版–>七牛云存储,阿里云OSS,腾讯云cos等等 也可以自己搭建文件服务器(FastDFS,minio) 0 过程中需要实名认证 … 1 开…...

谷歌浏览器插件
项目中有时候会用到插件 sync-cookie-extension1.0.0:开发环境同步测试 cookie 至 localhost,便于本地请求服务携带 cookie 参考地址:https://juejin.cn/post/7139354571712757767 里面有源码下载下来,加在到扩展即可使用FeHelp…...
Xshell远程连接Kali(默认 | 私钥)Note版
前言:xshell远程连接,私钥连接和常规默认连接 任务一 开启ssh服务 service ssh status //查看ssh服务状态 service ssh start //开启ssh服务 update-rc.d ssh enable //开启自启动ssh服务 任务二 修改配置文件 vi /etc/ssh/ssh_config //第一…...

Python:操作 Excel 折叠
💖亲爱的技术爱好者们,热烈欢迎来到 Kant2048 的博客!我是 Thomas Kant,很开心能在CSDN上与你们相遇~💖 本博客的精华专栏: 【自动化测试】 【测试经验】 【人工智能】 【Python】 Python 操作 Excel 系列 读取单元格数据按行写入设置行高和列宽自动调整行高和列宽水平…...
23-Oracle 23 ai 区块链表(Blockchain Table)
小伙伴有没有在金融强合规的领域中遇见,必须要保持数据不可变,管理员都无法修改和留痕的要求。比如医疗的电子病历中,影像检查检验结果不可篡改行的,药品追溯过程中数据只可插入无法删除的特性需求;登录日志、修改日志…...

uni-app学习笔记二十二---使用vite.config.js全局导入常用依赖
在前面的练习中,每个页面需要使用ref,onShow等生命周期钩子函数时都需要像下面这样导入 import {onMounted, ref} from "vue" 如果不想每个页面都导入,需要使用node.js命令npm安装unplugin-auto-import npm install unplugin-au…...
linux arm系统烧录
1、打开瑞芯微程序 2、按住linux arm 的 recover按键 插入电源 3、当瑞芯微检测到有设备 4、松开recover按键 5、选择升级固件 6、点击固件选择本地刷机的linux arm 镜像 7、点击升级 (忘了有没有这步了 估计有) 刷机程序 和 镜像 就不提供了。要刷的时…...
AI+无人机如何守护濒危物种?YOLOv8实现95%精准识别
【导读】 野生动物监测在理解和保护生态系统中发挥着至关重要的作用。然而,传统的野生动物观察方法往往耗时耗力、成本高昂且范围有限。无人机的出现为野生动物监测提供了有前景的替代方案,能够实现大范围覆盖并远程采集数据。尽管具备这些优势…...
基于IDIG-GAN的小样本电机轴承故障诊断
目录 🔍 核心问题 一、IDIG-GAN模型原理 1. 整体架构 2. 核心创新点 (1) 梯度归一化(Gradient Normalization) (2) 判别器梯度间隙正则化(Discriminator Gradient Gap Regularization) (3) 自注意力机制(Self-Attention) 3. 完整损失函数 二…...

C语言中提供的第三方库之哈希表实现
一. 简介 前面一篇文章简单学习了C语言中第三方库(uthash库)提供对哈希表的操作,文章如下: C语言中提供的第三方库uthash常用接口-CSDN博客 本文简单学习一下第三方库 uthash库对哈希表的操作。 二. uthash库哈希表操作示例 u…...
Chromium 136 编译指南 Windows篇:depot_tools 配置与源码获取(二)
引言 工欲善其事,必先利其器。在完成了 Visual Studio 2022 和 Windows SDK 的安装后,我们即将接触到 Chromium 开发生态中最核心的工具——depot_tools。这个由 Google 精心打造的工具集,就像是连接开发者与 Chromium 庞大代码库的智能桥梁…...