ORB-SLAM2源码学习:MapPoint.cc④: 新增地图点总结
前言
让我们来总结ORB-SLAM2 中的新增地图点。
1.在第一阶段跟踪中的恒速模型跟踪中新增地图点
针对双目相机或RGB-D相机,找出上一帧中具有有效深度值且不是地图点的特征点,将其中较近的点作为上一帧新的临时地图点, 并记录在向扯mlpTemporalPoints 中。注意,这里因为是临时地图点,所以没有添加地图点的相互观测和属性信息(最佳描述子、平均观测方向、观测距离范围)。
ORB-SLAM2源码学习:Tracking.cc:Tracking::UpdateLastFrame更新上一帧位姿并创建临时地图点-CSDN博客
void Tracking :: UpdateLastFrame ()
{//Step 1 : 利用参考关键帧更新L - 帧在世界坐标系F 的位姿//······//Step 2 : 对于双门相机或RGB-D 相机,为上一帧生成新的临时地图点//······//加入上一帧的地图点中mLastFrame.mvpMapPoints[i] =pNewMP;//标记为临时添加的地图,之后会全部删除mlpTemporalPoints.push_back(pNewMP);2.第二阶段跟踪结束后新建关键帧时
针对双目相机或RGB-D相机,找出当前帧中具有有效深度值且不是地图点的特征点,将其中较近的点作为当前帧的新的地图点。与函数Tracking::UpdateLastFrame()功能类似,不同之处是这里添加的是真正的地图点, 会添加地图点和关键帧的相互观测和属性信息,如最佳描述子、平均观测方向、观测距离范围。
....
MapPoint* pNewMP = new MapPoint(x3D,pKF,mpMap);// 这些添加属性的操作是每次创建MapPoint后都要做的pNewMP->AddObservation(pKF,i);pKF->AddMapPoint(pNewMP,i);pNewMP->ComputeDistinctiveDescriptors();pNewMP->UpdateNormalAndDepth();mpMap->AddMapPoint(pNewMP);mCurrentFrame.mvpMapPoints[i]=pNewMP;
....ORB-SLAM2源码学习:Tracking.cc: void Tracking::CreateNewKeyFrame 创建新的关键帧-CSDN博客
3.局部建图线程中
1.在局部建图线程中,用当前关键帧与相邻关键帧通过三角化生成新的地图点。这里地图点会添加相互观测和属性信息,如最佳描述子、平均观测方向、观测距离范围,并且会将新增地图点放到一个名为“最近新增地图点”的队列mlpRecentAddedMapPoints中,这些新增的地图点后续需要接受函数MapPointCulling 的检验。
//三角化生成3D点成功,构造成MapPointMapPoint* pMP = new MapPoint(x3D,mpCurrentKeyFrame,mpMap);// Step 6.9:为该MapPoint添加属性:// a.观测到该MapPoint的关键帧pMP->AddObservation(mpCurrentKeyFrame,idx1); pMP->AddObservation(pKF2,idx2);mpCurrentKeyFrame->AddMapPoint(pMP,idx1);pKF2->AddMapPoint(pMP,idx2);// b.该MapPoint的描述子pMP->ComputeDistinctiveDescriptors();// c.该MapPoint的平均观测方向和深度范围pMP->UpdateNormalAndDepth();mpMap->AddMapPoint(pMP);
ORB-SLAM2源码学习:LocalMapping.cc: LocalMapping::CreateNewMapPoints生成新的地图点-CSDN博客
2.在局部建图线程中, 将当前关键帧的地图点分别与一级、二级相连关键帧的地图点进行正向融合和反向融合。这里的融合包括替换或新增地图点,并且会添加相互观测。最后会统一更新地图点的属性信息。
....vpMapPointMatches = mpCurrentKeyFrame->GetMapPointMatches();for(size_t i=0, iend=vpMapPointMatches.size(); i<iend; i++){MapPoint* pMP=vpMapPointMatches[i];if(pMP){if(!pMP->isBad()){// 在所有找到pMP的关键帧中,获得最佳的描述子pMP->ComputeDistinctiveDescriptors();// 更新平均观测方向和观测距离pMP->UpdateNormalAndDepth();}}}....ORB-SLAM2源码学习:LocalMapping.cc: void LocalMapping::SearchInNeighbors 检查并融合当前关键帧和相邻帧(两级相邻)的重复地图点-CSDN博客
结束语
以上就是我学习到的内容,如果对您有帮助请多多支持我,如果哪里有问题欢迎大家在评论区积极讨论,我看到会及时回复。
相关文章:

ORB-SLAM2源码学习:MapPoint.cc④: 新增地图点总结
前言 让我们来总结ORB-SLAM2 中的新增地图点。 1.在第一阶段跟踪中的恒速模型跟踪中新增地图点 针对双目相机或RGB-D相机,找出上一帧中具有有效深度值且不是地图点的特征点,将其中较近的点作为上一帧新的临时地图点, 并记录在向扯mlpTempo…...

2025西湖论剑-babytrace
前言 就做了下题目,pwn1/3 都是签到,pwn2 后面绕 ptrace 有点意思,简单记录一下 漏洞分析 子进程中的读/写功能没有检查负数的情况,存在越界读写: void __fastcall get_value(__int64 *int64_arr) {__int64 ll; //…...

绘图专用,26个常见流程图符号及其解释
关注作者 当您设计网站、构建应用程序或绘制业务系统时,您需要一种方法来清晰地绘制步骤和用户流程。虽然您可以使用流程图来概述这些过程,但箭头和方框只能帮助您到目前为止。为了清楚地表达您的意思,您需要流程图符号。 为了帮助解释每个流…...
是什么?)
【个人学习记录】软件开发生命周期(SDLC)是什么?
软件开发生命周期(Software Development Life Cycle,SDLC)是一个用于规划、创建、测试和部署信息系统的结构化过程。它包含以下主要阶段: 需求分析(Requirements Analysis) 收集并分析用户需求定义系统目标…...

自学SpringBoot笔记
概念 什么是SpringBoot? Spring Boot 是基于 Spring Framework 的一款开源框架,主要用于简化 Spring 应用程序的开发。它通过提供一系列的 开箱即用的功能 和 自动配置,让开发者可以快速构建生产级别的独立应用程序,而无需手动配…...

03JavaWeb——Ajax-Vue-Element(项目实战)
1 Ajax 1.1 Ajax介绍 1.1.1 Ajax概述 我们前端页面中的数据,如下图所示的表格中的学生信息,应该来自于后台,那么我们的后台和前端是互不影响的2个程序,那么我们前端应该如何从后台获取数据呢?因为是2个程序…...
无重复字符的最长子串)
[leetcode](找到vector中的特定元素并删除)无重复字符的最长子串
一.找到vector中的特定元素并删除 #include <iostream> #include <vector> #include <algorithm> int main() { // 示例 vector std::vector<int> vec {1, 2, 3, 4, 5, 6}; // 要删除的元素 int aim 3; // 查找元素 auto it std::fin…...

Mockito+PowerMock+Junit单元测试
一、单元测试用途 1、日常开发团队要求规范,需要对开发需求代码进行单元测试并要求行覆盖率达到要求,DevOps流水线也会开设相关门禁阀值阻断代码提交,一般新增代码行覆盖率80%左右。 二、Mock测试介绍 1、Mock是为了解决不同的单元之间由于…...

Ncat: bind to :::7777: Address already in use报错问题解决
问题描述 Ncat: bind to :::7777: Address already in use. QUITTING. 具体解决方法 If you are in linux environment try, Use netstat -tulpn to display the processeskill -9 <pid> This will terminate the process If you are using windows, Use netstat -…...

Docker 搭建mysql 连接超时问题,xxl-job启动mysql连接报错,禁用dns
1.本地连接Navicat报错信息,猜测是navicat默认连接超时导致的,后面换成idea一个插件虽然慢但连接上了 2013 - Lost connection to MySQL server at reading initial communication packet 2.启动xxl-job会报错,网上有人mysql驱动与数据库不匹…...

在线图片像素颜色拾取工具
在线图片像素颜色拾取工具,非常方便的一个工具,无需登录,用完就走。 包括中文和英文版本。 https://getcolor.openai2025.com...

Qt之登录界面(splash)
在上一篇多文档窗口设计(MDI)的基础上增加了一个登录界面(splash). 该模块可以扩展为常规的软件登录界面。 界面展示如下 如果用户名和密码输入正确,则调到MDI界面,如果用户名和密码一共输入三次以上,则程序强制退出…...

NotebookLM:Google 最新 AI 笔记助理解析与实战应用
NotebookLM:Google 最新 AI 笔记助理解析与实战应用 在 AI 驱动的生产力工具不断进化的今天,Google 推出的 NotebookLM(Notebook Language Model)成为了一款备受关注的智能笔记助理。它结合了 Google 的大语言模型(LL…...

软路由系统iStoreOS 一键安装 docker compose
一键安装命令 大家好!今天我来分享一个快速安装 docker-compose 的方法。以下是我常用的命令,当前版本是 V2.32.4。如果你需要最新版本,可以查看获取docker compose最新版本号 部分,获取最新版本号后替换命令中的版本号即可。 w…...

vue3本地文件下载
开发记录: vue3本地下载文件要把文件放到public下,如果放在src里面可能会出现这个问题...

纯代码实现给WordPress添加文章复制功能
在给wordpress添加内容时,有时会遇到文章复制的功能,但是wordpress又没有这个功能。把下面一段代码添加到functions.php文件中,就可以实现这个功能。 /** Function for post duplication. Dups appear as drafts. User is redirected to the…...

Redis 中 TTL 的基本知识与禁用缓存键的实现策略(Java)
目录 前言1. 基本知识2. Java代码 前言 🤟 找工作,来万码优才:👉 #小程序://万码优才/r6rqmzDaXpYkJZF 单纯学习Redis可以看我前言的Java基本知识路线!! 对于Java的基本知识推荐阅读: java框架…...

【PyQt】图像处理系统
[toc]pyqt实现图像处理系统 图像处理系统 1.创建阴影去除ui文件 2.阴影去除代码 1.创建阴影去除ui文件 UI文件效果图: 1.1QT Desiger设置组件 1.两个Pushbutton按钮 2.两个label来显示图像 3.Text Browser来显示输出信息 1.2布局的设置 1.先不使用任何La…...

Ruby语言的循环实现
Ruby语言的循环实现深入探讨 在程序设计中,循环是一种常见的控制结构,用于重复执行某些代码块。不同的编程语言提供了不同类型的循环结构,以满足不同的需求。Ruby是一种灵活且易于使用的编程语言,其循环实现方式独具一格…...

javaEE安全开发 SQL预编译 Filter过滤器 Listener 监听器 访问控制
前言 java开发和其他开发的不同并且更安全就是因为他拥有简单的预编译机制 filter 过滤器 和 listener 监听器 这个很重要 就是 web应用监听器和过滤器是在 Servlet 之前的并且 我们的请求和响应都需要经过 两者的同意才可以通过 缺一不可 、 Listener 安全方面 监听器…...

变量 varablie 声明- Rust 变量 let mut 声明与 C/C++ 变量声明对比分析
一、变量声明设计:let 与 mut 的哲学解析 Rust 采用 let 声明变量并通过 mut 显式标记可变性,这种设计体现了语言的核心哲学。以下是深度解析: 1.1 设计理念剖析 安全优先原则:默认不可变强制开发者明确声明意图 let x 5; …...

Android15默认授权浮窗权限
我们经常有那种需求,客户需要定制的apk集成在ROM中,并且默认授予其【显示在其他应用的上层】权限,也就是我们常说的浮窗权限,那么我们就可以通过以下方法在wms、ams等系统服务的systemReady()方法中调用即可实现预置应用默认授权浮…...
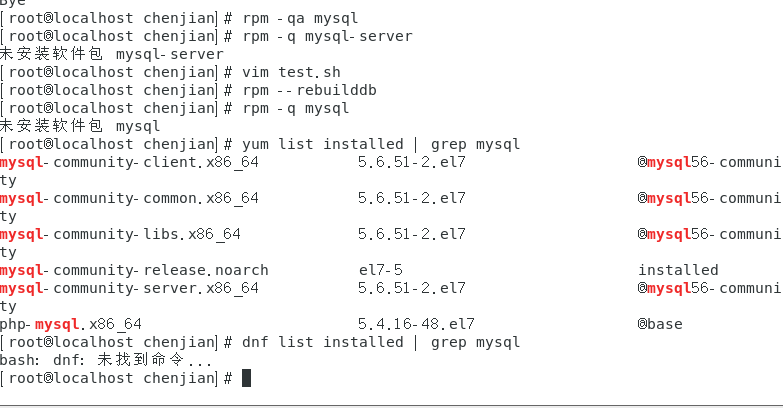
mysql已经安装,但是通过rpm -q 没有找mysql相关的已安装包
文章目录 现象:mysql已经安装,但是通过rpm -q 没有找mysql相关的已安装包遇到 rpm 命令找不到已经安装的 MySQL 包时,可能是因为以下几个原因:1.MySQL 不是通过 RPM 包安装的2.RPM 数据库损坏3.使用了不同的包名或路径4.使用其他包…...
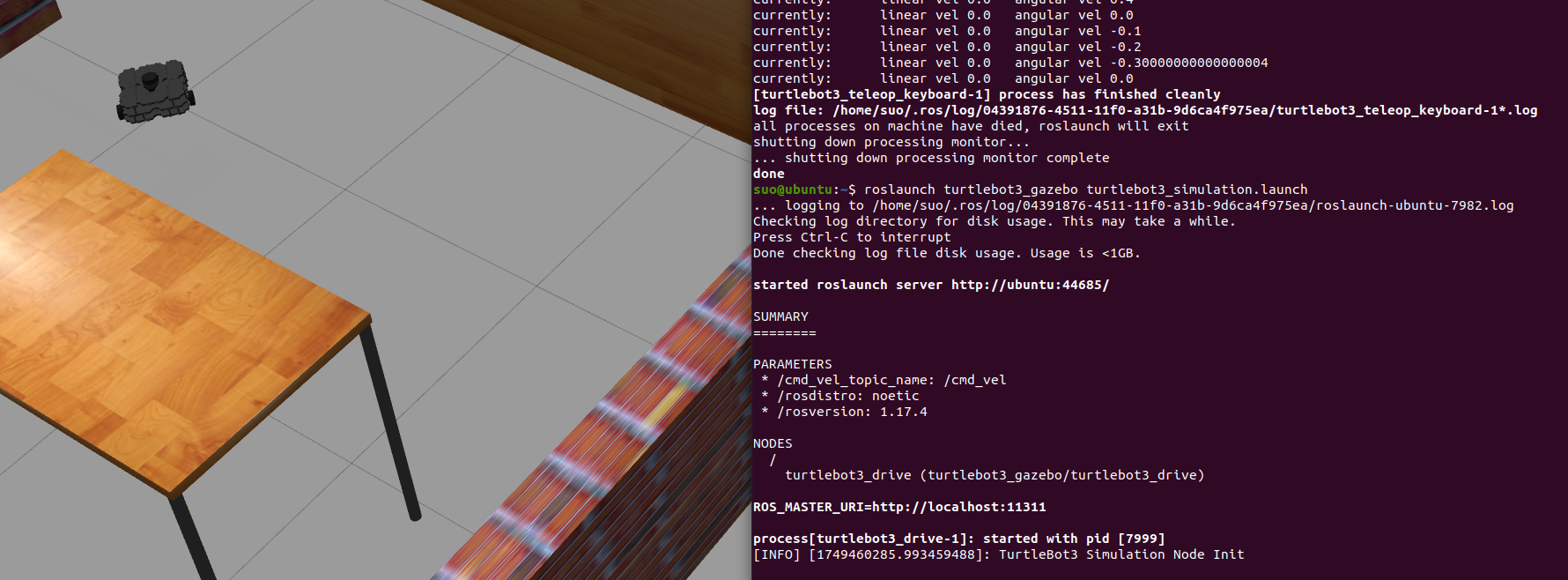
基于TurtleBot3在Gazebo地图实现机器人远程控制
1. TurtleBot3环境配置 # 下载TurtleBot3核心包 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3.git git clone -b noetic https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git git clone -b noetic-dev…...
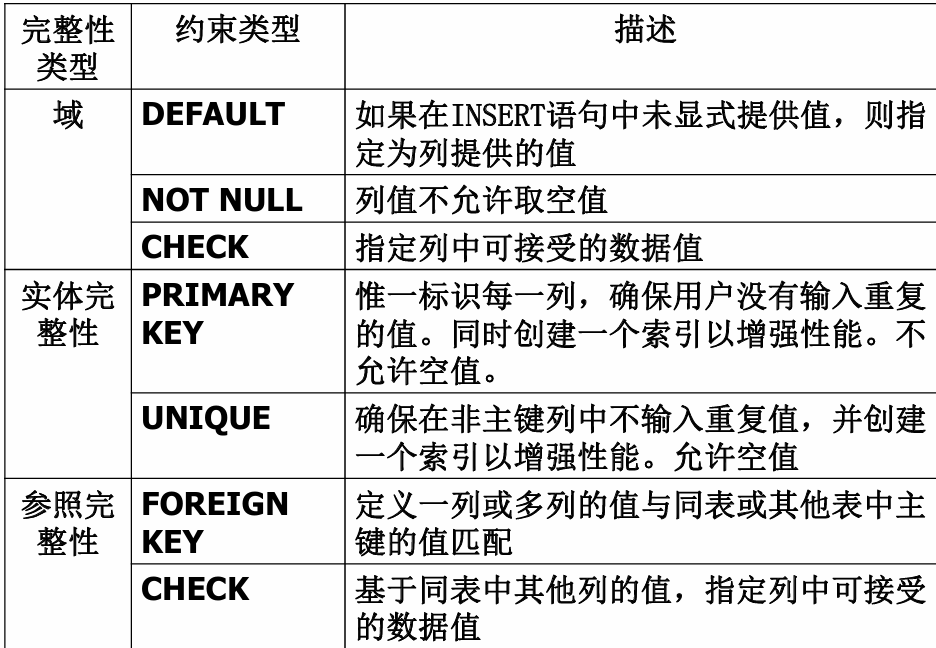
七、数据库的完整性
七、数据库的完整性 主要内容 7.1 数据库的完整性概述 7.2 实体完整性 7.3 参照完整性 7.4 用户定义的完整性 7.5 触发器 7.6 SQL Server中数据库完整性的实现 7.7 小结 7.1 数据库的完整性概述 数据库完整性的含义 正确性 指数据的合法性 有效性 指数据是否属于所定…...

【无标题】路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论
路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论 一、传统路径模型的根本缺陷 在经典正方形路径问题中(图1): mermaid graph LR A((A)) --- B((B)) B --- C((C)) C --- D((D)) D --- A A -.- C[无直接路径] B -…...

莫兰迪高级灰总结计划简约商务通用PPT模版
莫兰迪高级灰总结计划简约商务通用PPT模版,莫兰迪调色板清新简约工作汇报PPT模版,莫兰迪时尚风极简设计PPT模版,大学生毕业论文答辩PPT模版,莫兰迪配色总结计划简约商务通用PPT模版,莫兰迪商务汇报PPT模版,…...
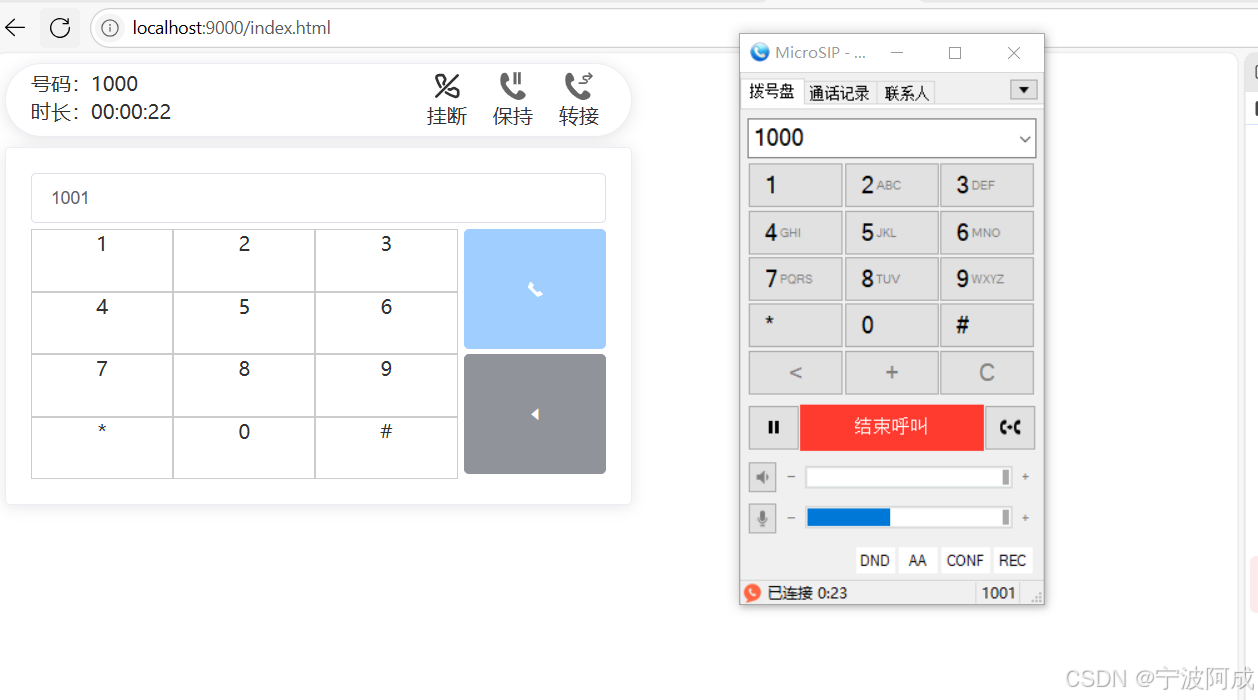
通过MicroSip配置自己的freeswitch服务器进行调试记录
之前用docker安装的freeswitch的,启动是正常的, 但用下面的Microsip连接不上 主要原因有可能一下几个 1、通过下面命令可以看 [rootlocalhost default]# docker exec -it freeswitch fs_cli -x "sofia status profile internal"Name …...

HTML前端开发:JavaScript 获取元素方法详解
作为前端开发者,高效获取 DOM 元素是必备技能。以下是 JS 中核心的获取元素方法,分为两大系列: 一、getElementBy... 系列 传统方法,直接通过 DOM 接口访问,返回动态集合(元素变化会实时更新)。…...

用神经网络读懂你的“心情”:揭秘情绪识别系统背后的AI魔法
用神经网络读懂你的“心情”:揭秘情绪识别系统背后的AI魔法 大家好,我是Echo_Wish。最近刷短视频、看直播,有没有发现,越来越多的应用都开始“懂你”了——它们能感知你的情绪,推荐更合适的内容,甚至帮客服识别用户情绪,提升服务体验。这背后,神经网络在悄悄发力,撑起…...