Nxopen 直齿轮参数化设计
NXUG1953 Visualstudio 2019 参考论文: A Method for Determining the AGMA Tooth Form Factor from Equations for the Generated Tooth Root Fillet
//FullGear// Mandatory UF Includes
#include <uf.h>
#include <uf_object_types.h>// Internal Includes
#include <NXOpen/ListingWindow.hxx>
#include <NXOpen/NXMessageBox.hxx>
#include <NXOpen/UI.hxx>// Internal+External Includes
#include <NXOpen/Annotations.hxx>
#include <NXOpen/Assemblies_Component.hxx>
#include <NXOpen/Assemblies_ComponentAssembly.hxx>
#include <NXOpen/Body.hxx>
#include <NXOpen/BodyCollection.hxx>
#include <NXOpen/Face.hxx>
#include <NXOpen/Line.hxx>
#include <NXOpen/NXException.hxx>
#include <NXOpen/NXObject.hxx>
#include <NXOpen/Part.hxx>
#include <NXOpen/PartCollection.hxx>
#include <NXOpen/Session.hxx>
#include <NXOpen/PointCollection.hxx>
#include <NXOpen/Features_PointFeatureBuilder.hxx>
#include <NXOpen/Features_BaseFeatureCollection.hxx>
#include <NXOpen/MathUtils.hxx>
#include <NXOpen/Features_StudioSplineBuilderEx.hxx>
#include <NXOpen/Features_FeatureCollection.hxx>
#include <NXOpen/Point.hxx>
#include <NXOpen/Features_Extrude.hxx>
#include <NXOpen/Features_ExtrudeBuilder.hxx>
#include <NXOpen/GeometricUtilities_BooleanOperation.hxx>
#include <NXOpen/Direction.hxx>
#include <NXOpen/DirectionCollection.hxx>
#include <NXOpen/GeometricUtilities_Limits.hxx>
#include <NXOpen/GeometricUtilities_Extend.hxx>
#include <NXOpen/SectionCollection.hxx>
#include <NXOpen/Features_AssociativeArcBuilder.hxx>
#include <NXOpen/Features_AssociativeArc.hxx>
#include <NXOpen/SelectPoint.hxx>
#include <NXOpen/CurveFeatureRule.hxx>
#include <NXOpen/Features_StudioSpline.hxx>
#include <NXOpen/Spline.hxx>
#include <NXOpen/Arc.hxx>
#include <NXOpen/NXObjectManager.hxx>
#include <NXOpen/ScRuleFactory.hxx>// Std C++ Includes
#include <iostream>
#include <sstream>using namespace NXOpen;
using std::string;
using std::exception;
using std::stringstream;
using std::endl;
using std::cout;
using std::cerr;//------------------------------------------------------------------------------
// NXOpen c++ test class
//------------------------------------------------------------------------------
class MyClass
{// class members
public:static Session *theSession;static UI *theUI;MyClass();~MyClass();void do_it();void print(const NXString &);void print(const string &);void print(const char*);NXOpen::Point3d Involutecurve(double alphax, double rb);NXOpen::Point* pointcreat(NXOpen::Point3d InputPoint, NXOpen::BasePart* part1);void POINTconstruction(NXOpen::Point* point1, NXOpen::BasePart* part1);NXOpen::Point3d Rotz(double thetai, NXOpen::Point3d inputpoint3d, NXOpen::MathUtils* Ms);NXOpen::NXObject* splinecreatbypoint(std::vector<NXOpen::Point* > CurvePoint, NXOpen::BasePart* part1);std::vector<NXOpen::Point* > CreatSymmetricPoint(std::vector<NXOpen::Point* > CurvePoint, NXOpen::BasePart* part1);NXOpen::NXObject* arccreatthreepoint(std::vector<NXOpen::Point* > ARCPoint, NXOpen::BasePart* part1);void addsplinetosection(NXOpen::NXObject* splinexnObject, NXOpen::Section* sectionx, tag_t splinexTag, NXOpen::Point3d helpPoint, NXOpen::Part* GPart);void addarctosection(NXOpen::NXObject* arcxnObject, NXOpen::Section* sectionx, tag_t arcxTag, NXOpen::Point3d helpPoint, NXOpen::Part* GPart);std::vector<NXOpen::Point* >RotZPoint(std::vector<NXOpen::Point* > Point11, double theta, NXOpen::MathUtils* Ms, NXOpen::BasePart* part1);
private:BasePart *workPart, *displayPart;NXMessageBox *mb;ListingWindow *lw;LogFile *lf;
};//------------------------------------------------------------------------------
// Initialize static variables
//------------------------------------------------------------------------------
Session *(MyClass::theSession) = NULL;
UI *(MyClass::theUI) = NULL;//------------------------------------------------------------------------------
// Constructor
//------------------------------------------------------------------------------
MyClass::MyClass()
{// Initialize the NX Open C++ API environmentMyClass::theSession = NXOpen::Session::GetSession();MyClass::theUI = UI::GetUI();mb = theUI->NXMessageBox();lw = theSession->ListingWindow();lf = theSession->LogFile();workPart = theSession->Parts()->BaseWork();displayPart = theSession->Parts()->BaseDisplay();}//------------------------------------------------------------------------------
// Destructor
//------------------------------------------------------------------------------
MyClass::~MyClass()
{
}//------------------------------------------------------------------------------
// Print string to listing window or stdout
//------------------------------------------------------------------------------
void MyClass::print(const NXString &msg)
{if(! lw->IsOpen() ) lw->Open();lw->WriteLine(msg);
}
void MyClass::print(const string &msg)
{if(! lw->IsOpen() ) lw->Open();lw->WriteLine(msg);
}
void MyClass::print(const char * msg)
{if(! lw->IsOpen() ) lw->Open();lw->WriteLine(msg);
}NXOpen::Point3d MyClass::Involutecurve(double alphax, double rb)
{double rx = rb / cos(alphax);double thetax = tan(alphax) - alphax;double xx = -rx * sin(thetax);double yy = rx * cos(thetax);NXOpen::Point3d OutputPoint3d = {xx,yy,0.0} ;return OutputPoint3d;
}
NXOpen::Point* MyClass::pointcreat(NXOpen::Point3d InputPoint, NXOpen::BasePart* part1)
{NXOpen::Point* point;point = part1->Points()->CreatePoint(InputPoint);return point;
}
void MyClass::POINTconstruction(NXOpen::Point* point1, NXOpen::BasePart* part1)
{NXOpen::Features::Feature* nullNXOpen_Features_Feature(NULL);NXOpen::Features::PointFeatureBuilder* pointFeatureBuilder1;pointFeatureBuilder1 = part1->BaseFeatures()->CreatePointFeatureBuilder(nullNXOpen_Features_Feature);pointFeatureBuilder1->SetPoint(point1);NXOpen::NXObject* nXObject1;nXObject1 = pointFeatureBuilder1->Commit();pointFeatureBuilder1->Destroy();
}NXOpen::Point3d MyClass::Rotz(double thetai, NXOpen::Point3d inputpoint3d, NXOpen::MathUtils* Ms)
{NXOpen::Matrix3x3 Rzmatrix;Rzmatrix.Xx = cos(thetai);Rzmatrix.Xy = -sin(thetai);Rzmatrix.Xz = 0.0;Rzmatrix.Yx = sin(thetai);Rzmatrix.Yy = cos(thetai);Rzmatrix.Yz = 0.0;Rzmatrix.Zx = 0.0;Rzmatrix.Zy = 0.0;Rzmatrix.Zz = 1.0;NXOpen::Point3d outputpoint3d= Ms->Multiply(Rzmatrix, inputpoint3d);return outputpoint3d;
}
NXOpen::NXObject* MyClass::splinecreatbypoint(std::vector<NXOpen::Point* > CurvePoint, NXOpen::BasePart* part1)
{NXOpen::NXObject* nullNXOpen_NXObject(NULL);NXOpen::Features::StudioSplineBuilderEx* studioSplineBuilderEx;studioSplineBuilderEx = part1->Features()->CreateStudioSplineBuilderEx(nullNXOpen_NXObject);studioSplineBuilderEx->SetDegree(3);NXOpen::Features::GeometricConstraintData* geometricConstraintData;std::vector<Features::GeometricConstraintData*> constraints(CurvePoint.size());for (int gg = 0; gg < CurvePoint.size(); gg++){NXOpen::Point* point = CurvePoint[gg];geometricConstraintData = studioSplineBuilderEx->ConstraintManager()->CreateGeometricConstraintData();geometricConstraintData->SetPoint(point);constraints[gg] = geometricConstraintData;}studioSplineBuilderEx->ConstraintManager()->SetContents(constraints);NXOpen::NXObject* nXObject;nXObject = studioSplineBuilderEx->Commit();Spline* returnSpline = studioSplineBuilderEx->Curve();return nXObject;
}
std::vector<NXOpen::Point* >MyClass::CreatSymmetricPoint(std::vector<NXOpen::Point* > CurvePoint, NXOpen::BasePart* part1)
{std::vector<NXOpen::Point* > CurvePoint1;for (int i = 0; i < CurvePoint.size(); i++){NXOpen::Point* PP = CurvePoint[i];NXOpen::Point3d PP3d = PP->Coordinates();NXOpen::Point3d PP3df = { -PP3d.X,PP3d.Y,PP3d.Z};NXOpen::Point* pointi = pointcreat(PP3df, part1);CurvePoint1.push_back(pointi);}return CurvePoint1;
}NXOpen::NXObject* MyClass::arccreatthreepoint(std::vector<NXOpen::Point* > ARCPoint, NXOpen::BasePart* part1)
{NXOpen::Point* starpoint = ARCPoint[0];NXOpen::Point* endpoint = ARCPoint[1];NXOpen::Point* midpoint = ARCPoint[2];Features::AssociativeArc* nullFeatures_AssociativeArc(NULL);Features::AssociativeArcBuilder* associativeArcBuilder;associativeArcBuilder = part1->BaseFeatures()->CreateAssociativeArcBuilder(nullFeatures_AssociativeArc);Unit* unit;unit = associativeArcBuilder->Radius()->Units();associativeArcBuilder->SetStartPointOptions(Features::AssociativeArcBuilder::StartOptionPoint);associativeArcBuilder->SetEndPointOptions(Features::AssociativeArcBuilder::EndOptionPoint);associativeArcBuilder->SetMidPointOptions(Features::AssociativeArcBuilder::MidOptionPoint);associativeArcBuilder->Limits()->StartLimit()->SetLimitOption(GeometricUtilities::CurveExtendData::LimitOptionsAtPoint);associativeArcBuilder->Limits()->EndLimit()->SetLimitOption(GeometricUtilities::CurveExtendData::LimitOptionsAtPoint);associativeArcBuilder->Limits()->StartLimit()->Distance()->SetRightHandSide("0");associativeArcBuilder->Limits()->EndLimit()->Distance()->SetRightHandSide("0");associativeArcBuilder->StartPoint()->SetValue(starpoint);associativeArcBuilder->EndPoint()->SetValue(endpoint);associativeArcBuilder->MidPoint()->SetValue(midpoint);NXObject* nXObject;nXObject = associativeArcBuilder->Commit();associativeArcBuilder->Destroy();return nXObject;
}
void MyClass::addsplinetosection(NXOpen::NXObject* splinexnObject, NXOpen::Section* sectionx, tag_t splinexTag, NXOpen::Point3d helpPoint, NXOpen::Part* GPart)
{NXOpen::NXObject* nullNXOpen_NXObject(NULL);std::vector<NXOpen::Features::Feature*> features2(1);NXOpen::Features::StudioSpline* studioSpline1(dynamic_cast<NXOpen::Features::StudioSpline*>(GPart->Features()->FindObject(splinexnObject->JournalIdentifier())));features2[0] = studioSpline1;NXOpen::CurveFeatureRule* curveFeatureRule2;curveFeatureRule2 = GPart->ScRuleFactory()->CreateRuleCurveFeature(features2);std::vector<NXOpen::SelectionIntentRule*> rules2(1);rules2[0] = curveFeatureRule2;NXOpen::Spline* spline1(dynamic_cast<NXOpen::Spline*>(NXOpen::NXObjectManager::Get(splinexTag)));sectionx->AddToSection(rules2, spline1, nullNXOpen_NXObject, nullNXOpen_NXObject, helpPoint, NXOpen::Section::ModeCreate, false);
}
void MyClass::addarctosection(NXOpen::NXObject* arcxnObject, NXOpen::Section* sectionx, tag_t arcxTag, NXOpen::Point3d helpPoint, NXOpen::Part* GPart)
{NXOpen::NXObject* nullNXOpen_NXObject(NULL);std::vector<NXOpen::Features::Feature*> features3(1);NXOpen::Features::AssociativeArc* associativeArc1(dynamic_cast<NXOpen::Features::AssociativeArc*>(GPart->Features()->FindObject(arcxnObject->JournalIdentifier())));features3[0] = associativeArc1;NXOpen::CurveFeatureRule* curveFeatureRule3;curveFeatureRule3 = GPart->ScRuleFactory()->CreateRuleCurveFeature(features3);std::vector<NXOpen::SelectionIntentRule*> rules3(1);rules3[0] = curveFeatureRule3;NXOpen::Arc* arc1(dynamic_cast<NXOpen::Arc*>(NXOpen::NXObjectManager::Get(arcxTag)));sectionx->AddToSection(rules3, arc1, nullNXOpen_NXObject, nullNXOpen_NXObject, helpPoint, NXOpen::Section::ModeCreate, false);
}
std::vector<NXOpen::Point* >MyClass::RotZPoint(std::vector<NXOpen::Point* > inputPoint, double theta, NXOpen::MathUtils* Ms, NXOpen::BasePart* part1)
{std::vector<NXOpen::Point* > outputPoint;for (int i = 0; i < inputPoint.size(); i++){NXOpen::Point3d Pointi3d = Rotz(theta, inputPoint[i]->Coordinates(), Ms);NXOpen::Point* point1i = pointcreat(Pointi3d, part1);outputPoint.push_back(point1i);}return outputPoint;
}//------------------------------------------------------------------------------
// Do something
//------------------------------------------------------------------------------
void MyClass::do_it()
{NXOpen::Session* theSession = NXOpen::Session::GetSession();NXOpen::Part* GPart(theSession->Parts()->Work());NXOpen::Part* displayPart(theSession->Parts()->Display());NXOpen::MathUtils* Ms(theSession->MathUtils());lw->Open();char msg[256];//齿轮参数double mn = 6;double z = 20;double ToothWidth = 55.0;double Holediameter = 30.0;double ha = 1;double c = 0.25;double hf = (ha + c) * mn;double alphan = PI / 9;double theten = tan(alphan) - alphan;double d = mn * z;double r = d / 2;double da = d + 2 * ha * mn;double ra = da / 2;double db = d * cos(alphan);double rb = db / 2;double df = d - 2 * hf;double rf = df / 2;double beta = PI / z;double omegaS = PI / (2 * z) + theten;double alphaA = acos(rb / ra);// 齿条参数double cP = 0.25 * mn;double rhofP = 0.38 * mn;double hfP = 1.25 * mn;double hFfP = hfP - cP;double P = PI * mn;double sP = 0.5 * P;double alphaP = PI / 9;double lB = 0.5 * sP + hFfP * tan(alphaP) + hFfP / tan(alphan);double etaB = lB / r;double xB = cos(-etaB) * (-hFfP / tan(alphan)) - sin(-etaB) * (r - hFfP);double yB = sin(-etaB) * (-hFfP / tan(alphan)) + cos(-etaB) * (r - hFfP);double rB = sqrt(pow(xB, 2) + pow(yB, 2));double alphaB = acos(rb / rB);double lC = 0.5 * sP + hFfP * tan(alphaP) + rhofP * cos(alphaP);double etaC = lC / r;double xC = cos(-etaC) * 0.0 - sin(-etaC) * (r - hfP);double yC = sin(-etaC) * 0.0 + cos(-etaC) * (r - hfP);double deltaS = 0.5;double S = rb / 2 * (1 / pow(cos(alphaA), 2) - 1 / pow(cos(alphaB), 2));std::vector<NXOpen::Point* > RInvolutePoint;for (int i = 1; i < 100; i++){double Si = S - (i - 1) * deltaS;if (Si > 0){double alphai = acos(sqrt(1 / (2 * Si / rb + 1 / pow(cos(alphaB), 2))));NXOpen::Point3d OutputPoint3d = Involutecurve(alphai, rb);NXOpen::Point3d OutputPoint3d1 = Rotz(-omegaS, OutputPoint3d, Ms);NXOpen::Point* Opoint = pointcreat(OutputPoint3d1, GPart);RInvolutePoint.push_back(Opoint);}else{double alphai = alphaB;NXOpen::Point3d OutputPoint3d = Involutecurve(alphai, rb);NXOpen::Point3d OutputPoint3d1 = Rotz(-omegaS, OutputPoint3d, Ms);NXOpen::Point* Opoint = pointcreat(OutputPoint3d1, GPart);RInvolutePoint.push_back(Opoint);break;}}double Xc0 = 0.5 * sP + hFfP * tan(alphaP) + rhofP * cos(alphaP);double Yc0 = r - (hfP - rhofP);double deltaA = 0.01;std::vector<NXOpen::Point* > RTransitionpoint;for (int k = 1; k < 1000; k++){double thete = etaB - k * deltaA;if (thete > etaC){double phi = atan((r * thete - Xc0) / (r - Yc0));double Xc = (Yc0 * tan(thete) - (r * thete - Xc0)) * cos(thete);double Yc = -(r - Yc0 / cos(thete) + (Yc0 * tan(thete) - (r * thete - Xc0)) * sin(thete));double alpha = PI + (PI / 2 - phi - thete);double Xf = Xc + rhofP * cos(alpha);double Yf = Yc + rhofP * sin(alpha);double xk = Xf;double yk = r + Yf;NXOpen::Point3d InputPoint3d = { xk, yk,0.0 };NXOpen::Point* Tpoint = pointcreat(InputPoint3d, GPart);RTransitionpoint.push_back(Tpoint);}else{break;}}double xD = rf * sin(beta);double yD = rf * cos(beta);double xM = (xC + xD) / 2;double yM = sqrt(pow(rf, 2) - pow(xM, 2));NXOpen::Point3d Cpoint3d = { xC,yC,0.0 };NXOpen::Point3d Dpoint3d = { xD,yD,0.0 };NXOpen::Point3d Mpoint3d = { xM,yM,0.0 };NXOpen::Point* Cpoint = pointcreat(Cpoint3d, GPart);NXOpen::Point* Dpoint = pointcreat(Dpoint3d, GPart);NXOpen::Point* Mpoint = pointcreat(Mpoint3d, GPart);RTransitionpoint[0] = RInvolutePoint.back();RTransitionpoint.push_back(Cpoint);std::vector<NXOpen::Point* > RDedendumcirclepoint;RDedendumcirclepoint.push_back(Cpoint);RDedendumcirclepoint.push_back(Dpoint);RDedendumcirclepoint.push_back(Mpoint);std::vector<NXOpen::Point* > LInvolutePoint;LInvolutePoint = CreatSymmetricPoint(RInvolutePoint, GPart);std::vector<NXOpen::Point* > LTransitionpoint;LTransitionpoint = CreatSymmetricPoint(RTransitionpoint, GPart);std::vector<NXOpen::Point* > LDedendumcirclepoint;LDedendumcirclepoint = CreatSymmetricPoint(RDedendumcirclepoint, GPart);NXOpen::Point* Hpoint = pointcreat({ 0.0,ra,0.0 }, GPart);NXOpen::Point* Apoint = RInvolutePoint[0];NXOpen::Point3d Apoint3d = Apoint->Coordinates();NXOpen::Point* ApointR = pointcreat({ Apoint3d.X,Apoint3d.Y,Apoint3d.Z }, GPart);NXOpen::Point* ApointL = pointcreat({ -Apoint3d.X,Apoint3d.Y,Apoint3d.Z }, GPart);std::vector<NXOpen::Point* > Addendumcirclepoint;Addendumcirclepoint.push_back(ApointL);Addendumcirclepoint.push_back(ApointR);Addendumcirclepoint.push_back(Hpoint);char Twidth[256];sprintf(Twidth, "%f", ToothWidth);NXOpen::Features::Feature* nullNXOpen_Features_Feature(NULL);NXOpen::Body* nullNXOpen_Body(NULL);NXOpen::Features::ExtrudeBuilder* extrudeBuilder1;extrudeBuilder1 = GPart->Features()->CreateExtrudeBuilder(nullNXOpen_Features_Feature);extrudeBuilder1->BooleanOperation()->SetType(NXOpen::GeometricUtilities::BooleanOperation::BooleanTypeCreate);extrudeBuilder1->SetDistanceTolerance(0.001);NXOpen::Section* section1;section1 = GPart->Sections()->CreateSection(0.00095, 0.001, 0.05);extrudeBuilder1->SetSection(section1);extrudeBuilder1->AllowSelfIntersectingSection(true);section1->SetAllowedEntityTypes(NXOpen::Section::AllowTypesOnlyCurves);section1->AllowSelfIntersection(true);std::vector<NXOpen::Body*> targetBodies1(1);targetBodies1[0] = nullNXOpen_Body;extrudeBuilder1->BooleanOperation()->SetTargetBodies(targetBodies1);extrudeBuilder1->Limits()->StartExtend()->Value()->SetRightHandSide(Twidth);extrudeBuilder1->Limits()->EndExtend()->Value()->SetRightHandSide("0");NXOpen::Point3d origin1;NXOpen::Vector3d vector1(0.0, 0.0, 1.0);NXOpen::Direction* direction1;direction1 = GPart->Directions()->CreateDirection(origin1, vector1, NXOpen::SmartObject::UpdateOptionWithinModeling);extrudeBuilder1->SetDirection(direction1);NXOpen::NXObject* nullNXOpen_NXObject(NULL);NXOpen::Point3d helpPoint1;for (int j = 0; j < z; j++){double thetaj = j * 2 * PI / z;std::vector<NXOpen::Point* > Arc1jpoint;Arc1jpoint = RotZPoint(RDedendumcirclepoint, thetaj,Ms, GPart);NXObject* Arc1jnXObject = arccreatthreepoint(Arc1jpoint, GPart);tag_t Arc1jTag = NULL_TAG;Arc1jTag = Arc1jnXObject->Tag();std::vector<NXOpen::Point* > Spline2jpoint;Spline2jpoint = RotZPoint(RTransitionpoint, thetaj, Ms, GPart);NXObject* Spline2jnXObject = splinecreatbypoint(Spline2jpoint, GPart);tag_t Spline2jTag = NULL_TAG;Spline2jTag = Spline2jnXObject->Tag();std::vector<NXOpen::Point* > Spline3jpoint;Spline3jpoint = RotZPoint(RInvolutePoint, thetaj,Ms, GPart);NXObject* Spline3jnXObject = splinecreatbypoint(Spline3jpoint, GPart);tag_t Spline3jTag = NULL_TAG;Spline3jTag = Spline3jnXObject->Tag();std::vector<NXOpen::Point* > Arc4jpoint;Arc4jpoint = RotZPoint(Addendumcirclepoint, thetaj,Ms, GPart);NXObject* Arc4jnXObject = arccreatthreepoint(Arc4jpoint, GPart);tag_t Arc4jTag = NULL_TAG;Arc4jTag = Arc4jnXObject->Tag();std::vector<NXOpen::Point* > Spline5jpoint;Spline5jpoint = RotZPoint(LInvolutePoint, thetaj,Ms, GPart);NXObject* Spline5jnXObject = splinecreatbypoint(Spline5jpoint, GPart);tag_t Spline5jTag = NULL_TAG;Spline5jTag = Spline5jnXObject->Tag();std::vector<NXOpen::Point* > Spline6jpoint;Spline6jpoint = RotZPoint(LTransitionpoint, thetaj,Ms, GPart);NXObject* Spline6jnXObject = splinecreatbypoint(Spline6jpoint, GPart);tag_t Spline6jTag = NULL_TAG;Spline6jTag = Spline6jnXObject->Tag();std::vector<NXOpen::Point* > Arc7jpoint;Arc7jpoint = RotZPoint(LDedendumcirclepoint, thetaj,Ms, GPart);NXObject* Arc7jnXObject = arccreatthreepoint(Arc7jpoint, GPart);tag_t Arc7jTag = NULL_TAG;Arc7jTag = Arc7jnXObject->Tag();addarctosection(Arc1jnXObject, section1, Arc1jTag, helpPoint1, GPart);addsplinetosection(Spline2jnXObject, section1, Spline2jTag, helpPoint1, GPart);addsplinetosection(Spline3jnXObject, section1, Spline3jTag, helpPoint1, GPart);addarctosection(Arc4jnXObject, section1, Arc4jTag, helpPoint1, GPart);addsplinetosection(Spline5jnXObject, section1, Spline5jTag, helpPoint1, GPart);addsplinetosection(Spline6jnXObject, section1, Spline6jTag, helpPoint1, GPart);addarctosection(Arc7jnXObject, section1, Arc7jTag, helpPoint1, GPart);}NXOpen::Point* HalfholepointS= pointcreat({ Holediameter / 2,0.0,0.0}, GPart);NXOpen::Point* HalfholepointE = pointcreat({ -Holediameter / 2, 0.0,0.0 }, GPart);NXOpen::Point* HalfholepointM1 =pointcreat({0.0, Holediameter / 2,0.0 }, GPart);NXOpen::Point* HalfholepointM2 = pointcreat({ 0.0,-Holediameter / 2,0.0 }, GPart);std::vector<NXOpen::Point* > Halfhole1point;Halfhole1point.push_back(HalfholepointE);Halfhole1point.push_back(HalfholepointS);Halfhole1point.push_back(HalfholepointM1);NXOpen::NXObject* HolenXObject1 = arccreatthreepoint(Halfhole1point, GPart);tag_t HoleTag1 = NULL_TAG;HoleTag1 = HolenXObject1->Tag();addarctosection(HolenXObject1, section1, HoleTag1, helpPoint1, GPart);std::vector<NXOpen::Point* > Halfhole2point;Halfhole2point.push_back(HalfholepointS);Halfhole2point.push_back(HalfholepointE);Halfhole2point.push_back(HalfholepointM2);NXOpen::NXObject* HolenXObject2 = arccreatthreepoint(Halfhole2point, GPart);tag_t HoleTag2 = NULL_TAG;HoleTag2 = HolenXObject2->Tag();addarctosection(HolenXObject2, section1, HoleTag2, helpPoint1, GPart);extrudeBuilder1->SetParentFeatureInternal(false);NXOpen::Features::Feature* feature1;feature1 = extrudeBuilder1->CommitFeature();extrudeBuilder1->Destroy();// TODO: add your code here}//------------------------------------------------------------------------------
// Entry point(s) for unmanaged internal NXOpen C/C++ programs
//------------------------------------------------------------------------------
// Explicit Execution
extern "C" DllExport void ufusr( char *parm, int *returnCode, int rlen )
{try{// Create NXOpen C++ class instanceMyClass *theMyClass;theMyClass = new MyClass();theMyClass->do_it();delete theMyClass;}catch (const NXException& e1){UI::GetUI()->NXMessageBox()->Show("NXException", NXOpen::NXMessageBox::DialogTypeError, e1.Message());}catch (const exception& e2){UI::GetUI()->NXMessageBox()->Show("Exception", NXOpen::NXMessageBox::DialogTypeError, e2.what());}catch (...){UI::GetUI()->NXMessageBox()->Show("Exception", NXOpen::NXMessageBox::DialogTypeError, "Unknown Exception.");}
}//------------------------------------------------------------------------------
// Unload Handler
//------------------------------------------------------------------------------
extern "C" DllExport int ufusr_ask_unload()
{// Unloads the image when the application completesreturn (int)Session::LibraryUnloadOptionImmediately; }
相关文章:
Nxopen 直齿轮参数化设计
NXUG1953 Visualstudio 2019 参考论文: A Method for Determining the AGMA Tooth Form Factor from Equations for the Generated Tooth Root Fillet //FullGear// Mandatory UF Includes #include <uf.h> #include <uf_object_types.h>// Internal I…...

线程配置经验
工作时,时常会遇到,线程相关的问题与解法,本人会持续对开发过程中遇到的关于线程相关的问题及解决记录更新记录在此篇博客中。 目录 一、线程基本知识 1. 线程和进程 二、问题与解法 1. 避免乘法级别数量线程并行 1)使用线程池…...

火语言RPA--KimiAiFree服务
🚩【组件功能】:KimiAiFree服务支持联网搜索、支持智能体对话、支持长文档解读、支持图像OCR。 配置预览 配置说明 服务地址 支持T或# 自行搭建或第三方提供的KimiAiFree服务地址。 RefreshToken 支持T或# 与KimiAiFree服务交互时用到的token。从ki…...

P6120 [USACO17JAN] Hoof, Paper, Scissor S
难度:普及/提高−; 题意: 石头、剪刀、布游戏,先给出 n n n 轮已经知道的其中一人的对局情况,例如样例: 5 P - 布 P - 布 H - 石头 P - 布 S - 剪刀另外一人,只允许修改一次机会的情况下…...
Android Studio打包APK
1.导出APK安装包 如果是首次打包,Create new 单击蓝色对话框右边文件夹📂图标 ,选择密钥保存路径,然后在下方File name对话框中填写您想要名称,再点击OK回到密钥创建对话框。 在此对话框中填写密码(Passwo…...

08 比特币通用技术介绍
比特币分层 比特币区块结构 存储结构 区块是比特币存储交易的结构,一个区块总是指向其父节点。 一个区块包含三个字段:区块头、区块交易数量、交易列表。交易数量受到区块大小限制,输入、输出数量和脚本都会占用区块空间,矿工往…...

拟合损失函数
文章目录 拟合损失函数一、线性拟合1.1 介绍1.2 代码可视化1.2.1 生成示例数据1.2.2 损失函数1.2.3 绘制三维图像1.2.4 绘制等高线1.2.5 损失函数关于斜率的函数 二、 多变量拟合2.1 介绍2.2 代码可视化2.2.1 生成示例数据2.2.2 损失函数2.2.3 绘制等高线 三、 多项式拟合3.1 介…...

二进制安卓清单 binary AndroidManifest - XCTF apk 逆向-2
XCTF 的 apk 逆向-2 题目 wp,这是一道反编译对抗题。 题目背景 AndroidManifest.xml 在开发时是文本 xml,在编译时会被 aapt 编译打包成为 binary xml。具体的格式可以参考稀土掘金 MindMac 做的类图(2014),下面的博…...

在线免费快速无痕去除照片海报中的文字logo
上期和大家分享了用photoshop快速无痕去除照片海报中的文字logo的方法,有的同学觉得安装PS太麻烦,有那下载安装时间早都日落西山了,问有没有合适的在线方法可以快速去除;达芬奇上网也尝试了几个网站,今天分享一个对国人…...

引领未来科技潮流:Web3 前沿发展趋势
随着技术不断发展,我们正站在一个全新的互联网时代的门槛上,Web3的出现正在重新定义互联网的构架和运作方式。Web3,作为互联网的下一代发展趋势,其核心思想是去中心化、开放与用户主权。与现有的Web2.0相比,Web3更加注…...

【番外篇】鸿蒙扫雷天纪:运混沌灵智勘破雷劫天局
大家好啊,我是小象٩(๑ω๑)۶ 我的博客:Xiao Xiangζั͡ޓއއ 很高兴见到大家,希望能够和大家一起交流学习,共同进步。 这一节课我们不学习新的知识,我们来做一个扫雷小游戏 目录 扫雷小游戏概述一、扫雷游戏分析…...

08.OSPF 特殊区域及其他特性
OSPF 特殊区域及其他特性 一. 前言OSPF的四个特殊区域Stub末梢区域Totally Stub完全末梢区域NSSATotally NSSA完全的NSSA二.Stub 区域和 Totally Stub 区域(1)网络规模变大引发的问题(2)传输区域和末端区域(3)Stub 区域(4)Totally Stub 区域三.NSSA 区域和 Totally NSS…...

人工智能在医疗领域的应用有哪些?
人工智能在医疗领域的应用十分广泛,涵盖了诊断、治疗、药物研发等多个环节,以下是一些主要的应用: 医疗影像诊断 疾病识别:通过分析 X 光、CT、MRI 等影像,人工智能算法能够识别出肿瘤、结节、骨折等病变,…...
)
c#使用Confluent.Kafka实现生产者发送消息至kafka(远程连接kafka发送消息超时的解决 Local:Message timed out)
水一篇: 参考:c#使用Confluent.Kafka实现生产者发送消息至kafka(远程连接kafka发送消息超时的解决 Local:Message timed out) - 寒冰之光 - 博客园 该死的Kafka,远程连接Kafka超时以及解决办法 - 博客王大…...

【2025年数学建模美赛F题】(顶刊论文绘图)模型代码+论文
全球网络犯罪与网络安全政策的多维度分析及效能评估 摘要1 Introduction1.1 Problem Background1.2Restatement of the Problem1.3 Literature Review1.4 Our Work 2 Assumptions and Justifications数据完整性与可靠性假设:法律政策独立性假设:人口统计…...

DeepSeek 的背景介绍
在全球人工智能大模型蓬勃发展的浪潮中,DeepSeek 宛如一颗耀眼的新星,迅速崛起并吸引了众多关注的目光。它的出现不仅为人工智能领域注入了新的活力,也在一定程度上改变了行业的竞争格局。 一、创立背景与资金支持 DeepSeek,中文…...

Meta 计划 2025 年投资 650 亿美元推动 AI 发展
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...

信息学奥赛一本通 2110:【例5.1】素数环
【题目链接】 ybt 2110:【例5.1】素数环 【题目考点】 1. 深搜回溯 2. 质数 【解题思路】 1~n的数字构成一个环,要求相邻数字加和必须是质数。 该题最终输出的是一个序列,只不过逻辑上序列最后一个数字的下一个数字就是序列的第一个数字…...

Redis、MongoDB 和 MySQL评估
Redis、MongoDB 和 MySQL 是三种不同类型的数据库系统,各自有独特的特点和适用场景。MySQL 是一个关系型数据库管理系统(RDBMS),而 Redis 和 MongoDB 是非关系型数据库(NoSQL)。以下是对这三者的比较以及它…...

P1719 最大加权矩形
为了更好的备战 NOIP2013,电脑组的几个女孩子 LYQ,ZSC,ZHQ 认为,我们不光需要机房,我们还需要运动,于是就决定找校长申请一块电脑组的课余运动场地,听说她们都是电脑组的高手,校长没有马上答应他们…...

测试markdown--肇兴
day1: 1、去程:7:04 --11:32高铁 高铁右转上售票大厅2楼,穿过候车厅下一楼,上大巴车 ¥10/人 **2、到达:**12点多到达寨子,买门票,美团/抖音:¥78人 3、中饭&a…...
屋顶变身“发电站” ,中天合创屋面分布式光伏发电项目顺利并网!
5月28日,中天合创屋面分布式光伏发电项目顺利并网发电,该项目位于内蒙古自治区鄂尔多斯市乌审旗,项目利用中天合创聚乙烯、聚丙烯仓库屋面作为场地建设光伏电站,总装机容量为9.96MWp。 项目投运后,每年可节约标煤3670…...

Web后端基础(基础知识)
BS架构:Browser/Server,浏览器/服务器架构模式。客户端只需要浏览器,应用程序的逻辑和数据都存储在服务端。 优点:维护方便缺点:体验一般 CS架构:Client/Server,客户端/服务器架构模式。需要单独…...
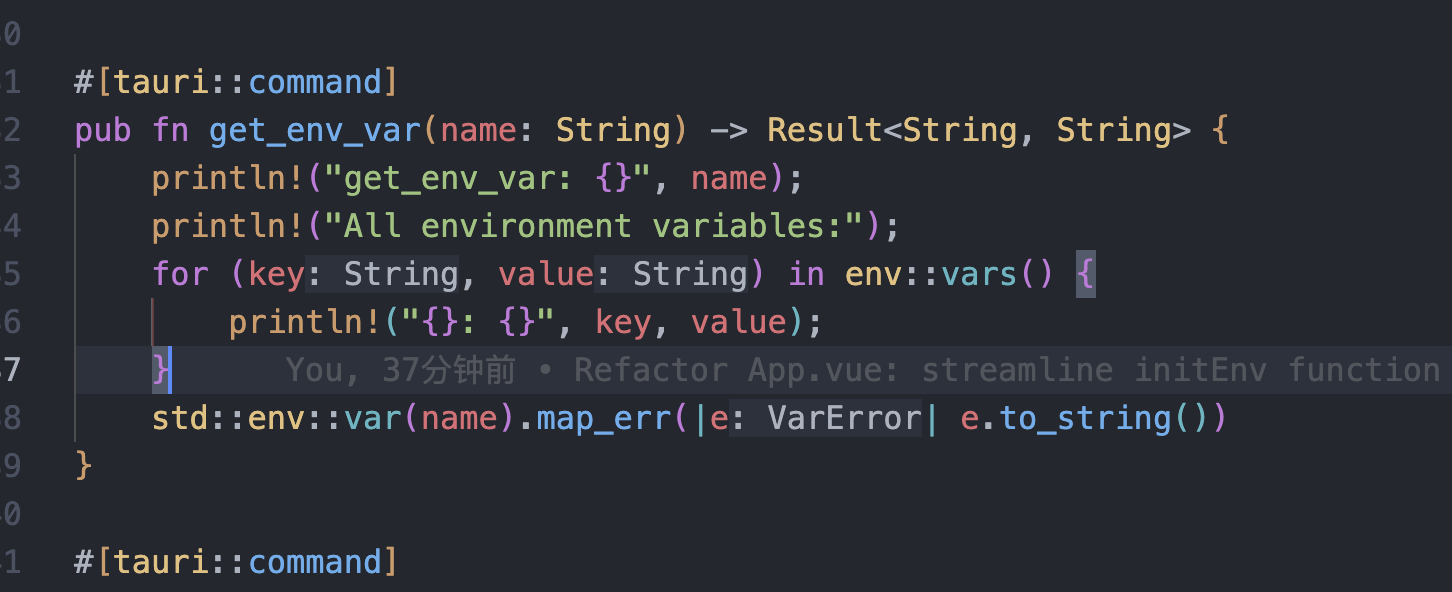
tauri项目,如何在rust端读取电脑环境变量
如果想在前端通过调用来获取环境变量的值,可以通过标准的依赖: std::env::var(name).ok() 想在前端通过调用来获取,可以写一个command函数: #[tauri::command] pub fn get_env_var(name: String) -> Result<String, Stri…...

高防服务器价格高原因分析
高防服务器的价格较高,主要是由于其特殊的防御机制、硬件配置、运营维护等多方面的综合成本。以下从技术、资源和服务三个维度详细解析高防服务器昂贵的原因: 一、硬件与技术投入 大带宽需求 DDoS攻击通过占用大量带宽资源瘫痪目标服务器,因此…...
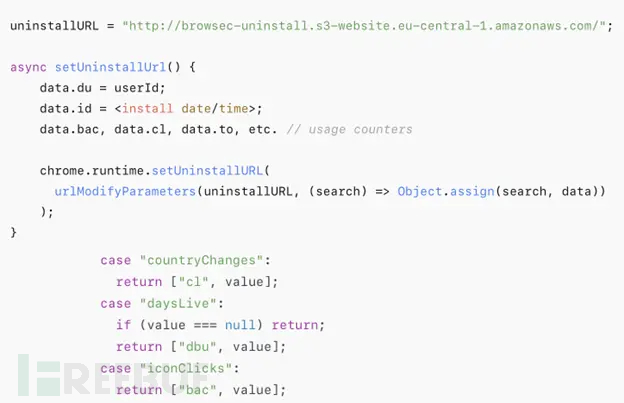
热门Chrome扩展程序存在明文传输风险,用户隐私安全受威胁
赛门铁克威胁猎手团队最新报告披露,数款拥有数百万活跃用户的Chrome扩展程序正在通过未加密的HTTP连接静默泄露用户敏感数据,严重威胁用户隐私安全。 知名扩展程序存在明文传输风险 尽管宣称提供安全浏览、数据分析或便捷界面等功能,但SEMR…...

Windows 下端口占用排查与释放全攻略
Windows 下端口占用排查与释放全攻略 在开发和运维过程中,经常会遇到端口被占用的问题(如 8080、3306 等常用端口)。本文将详细介绍如何通过命令行和图形化界面快速定位并释放被占用的端口,帮助你高效解决此类问题。 一、准…...
Web APIS Day01
1.声明变量const优先 那为什么一开始前面就不能用const呢,接下来看几个例子: 下面这张为什么可以用const呢?因为复杂数据的引用地址没变,数组还是数组,只是添加了个元素,本质没变,所以可以用con…...

十、【ESP32开发全栈指南: TCP客户端】
一、TCP协议核心特性回顾 TCP与UDP关键差异 特性TCPUDP连接方式面向连接 (三次握手)无连接可靠性可靠传输 (重传/排序/校验)尽力交付数据顺序保证数据按序到达不保证顺序流控制滑动窗口机制无流控制传输效率协议开销大头部开销小适用场景文件传输、网页浏览实时音视频、广播通…...
FPGA点亮ILI9488驱动的SPI+RGB接口LCD显示屏(一)
FPGA点亮ILI9488驱动的SPIRGB接口LCD显示屏 ILI9488 RGB接口初始化 目录 前言 一、ILI9488简介 二、3线SPI接口简介 三、配置寄存器介绍 四、手册和初始化verilog FPGA代码 总结 前言 ILI9488是一款广泛应用于嵌入式系统和电子设备的彩色TFT LCD显示控制器芯片。本文将介…...