DeepSeek+3D视觉机器人应用场景、前景和简单设计思路
DeepSeek+3D视觉机器人在多个领域具有广泛的应用场景和巨大的前景。以下是详细的分析:
应用场景
制造业
自动化装配:机器人可以精确地抓取和装配零件,提高生产效率和产品质量。
质量检测:通过3D视觉技术检测产品缺陷,确保产品质量。
库存管理:自动识别和管理仓库中的物品,提高库存管理效率。
物流与仓储
自动分拣:机器人可以快速准确地分拣包裹,提高物流效率。
货物定位:通过3D视觉技术快速定位货物位置,减少人工查找时间。
动态库存管理:实时监控库存变化,自动调整库存策略。
医疗健康
手术辅助:机器人可以辅助医生进行手术,提高手术精度和安全性。
康复训练:通过3D视觉技术监测患者的康复训练情况,提供个性化的康复方案。
药物分发:自动分发药物,减少人为错误,提高效率。
零售业
智能货架:自动识别货架上的商品,提供库存管理和补货建议。
顾客服务:通过3D视觉技术识别顾客行为,提供个性化推荐和服务。
安全监控:监控顾客行为,防止盗窃和意外事故。
农业
精准农业:通过3D视觉技术监测作物生长情况,提供精准的灌溉和施肥建议。
病虫害检测:自动检测作物病虫害,及时采取措施。
收获自动化:自动识别和采摘成熟作物,提高收获效率。
建筑与施工
质量检查:自动检查建筑结构和施工质量,确保工程安全。
进度监控:实时监控施工进度,及时调整施工计划。
物料管理:自动管理施工现场的物料,提高物料利用率。
家庭服务
家务机器人:自动清洁、整理家务,提高生活质量。
安全监控:监控家庭安全,及时发现异常情况。
陪伴机器人:为老人和儿童提供陪伴和照顾,减少孤独感。
前景
技术进步
3D视觉技术:随着3D相机技术的发展,3D视觉的精度和速度将进一步提高。
深度学习:深度学习模型的性能不断提升,能够处理更复杂的任务。
机器人技术:机器人硬件和控制技术的进步将使机器人更加灵活和高效。
市场需求
劳动力短缺:随着人口老龄化,劳动力短缺问题日益严重,自动化解决方案需求增加。
效率提升:企业对提高生产效率和降低成本的需求推动了自动化技术的发展。
个性化服务:消费者对个性化服务的需求增加,推动了智能机器人技术的发展。
政策支持
政府投资:许多国家和地区政府加大对自动化和机器人技术的投资。
政策扶持:出台相关政策支持机器人产业发展,提供税收优惠和补贴。
跨界融合
多学科融合:3D视觉、深度学习、机器人技术等多学科的融合将推动创新解决方案的出现。
行业合作:不同行业的合作将促进技术的快速应用和推广。
可持续发展
环境保护:自动化技术有助于减少资源浪费,提高资源利用效率。
节能减排:通过优化生产流程,减少能源消耗和碳排放。
总结
DeepSeek+3D视觉机器人在多个领域具有广泛的应用前景,能够显著提高生产效率、降低成本、提升服务质量,并推动社会的可持续发展。随着技术的不断进步和市场需求的增长,DeepSeek+3D视觉机器人将在未来发挥越来越重要的作用
高层次设计思路
硬件组件:
3D相机:用于捕捉环境的3D模型。
机械臂:用于执行抓取、移动等任务。
计算设备:用于运行深度学习模型和处理3D数据。
软件组件:
3D数据处理:使用点云库(如PCL)处理3D数据。
深度学习模型:用于物体识别和定位。
机器人控制:使用ROS(Robot Operating System)进行机器人控制。
用户界面:用于监控和控制机器人。
关键组件代码示例
1. 3D数据处理
使用PCL(Point Cloud Library)处理3D点云数据。
cpp
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/visualization/pcl_visualizer.h>int main() {pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);// 读取点云数据if (pcl::io::loadPCDFile<pcl::PointXYZ>("input_cloud.pcd", *cloud) == -1) {PCL_ERROR("Couldn't read file input_cloud.pcd \n");return (-1);}// 下采样pcl::VoxelGrid<pcl::PointXYZ> sor;sor.setInputCloud(cloud);sor.setLeafSize(0.01f, 0.01f, 0.01f);sor.filter(*cloud_filtered);// 可视化pcl::visualization::PCLVisualizer viewer("3D Viewer");viewer.addPointCloud<pcl::PointXYZ>(cloud_filtered, "sample cloud");while (!viewer.wasStopped()) {viewer.spinOnce(100);boost::this_thread::sleep(boost::posix_time::microseconds(100000));}return 0;
}
2. 深度学习模型
使用PyTorch构建一个简单的3D物体识别模型。
python
import torch
import torch.nn as nn
import torch.nn.functional as Fclass Simple3DModel(nn.Module):def __init__(self):super(Simple3DModel, self).__init__()self.conv1 = nn.Conv3d(1, 32, kernel_size=3, stride=1, padding=1)self.conv2 = nn.Conv3d(32, 64, kernel_size=3, stride=1, padding=1)self.fc1 = nn.Linear(64 * 8 * 8 * 8, 128)self.fc2 = nn.Linear(128, 10)def forward(self, x):x = F.relu(self.conv1(x))x = F.max_pool3d(x, 2)x = F.relu(self.conv2(x))x = F.max_pool3d(x, 2)x = x.view(x.size(0), -1)x = F.relu(self.fc1(x))x = self.fc2(x)return x# 示例输入
input_tensor = torch.randn(1, 1, 16, 16, 16)
model = Simple3DModel()
output = model(input_tensor)
print(output)
3. 机器人控制
使用ROS进行机器人控制。
bash
# 创建ROS工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make# 创建ROS包
cd src
catkin_create_pkg deepseek_3d_robot rospy std_msgs sensor_msgs geometry_msgs# 创建节点
cd deepseek_3d_robot/src
touch deepseek_3d_node.py
chmod +x deepseek_3d_node.py
python
#!/usr/bin/env pythonimport rospy
from sensor_msgs.msg import PointCloud2
from geometry_msgs.msg import PoseStamped
import sensor_msgs.point_cloud2 as pc2class DeepSeek3DRobot:def __init__(self):rospy.init_node('deepseek_3d_node', anonymous=True)self.point_cloud_sub = rospy.Subscriber("/camera/depth/points", PointCloud2, self.point_cloud_callback)self.pose_pub = rospy.Publisher("/robot/target_pose", PoseStamped, queue_size=10)def point_cloud_callback(self, msg):# 处理点云数据points = list(pc2.read_points(msg, field_names=("x", "y", "z"), skip_nans=True))# 假设我们已经识别出目标物体的位置target_pose = PoseStamped()target_pose.header.frame_id = "camera_depth_optical_frame"target_pose.pose.position.x = 0.5target_pose.pose.position.y = 0.0target_pose.pose.position.z = 0.5self.pose_pub.publish(target_pose)def run(self):rospy.spin()if __name__ == '__main__':robot = DeepSeek3DRobot()robot.run()
总结
以上代码示例展示了如何构建一个结合3D视觉和深度学习的机器人系统的关键组件。你可以根据具体需求进一步扩展和优化这些组件。以下是一些进一步的建议:
数据采集:使用3D相机采集真实环境中的点云数据。
模型训练:使用大量的3D点云数据训练深度学习模型。
机器人控制:使用ROS进行更复杂的机器人控制和任务调度。
用户界面:开发一个用户界面来监控和控制机器人。
DeepSeek+3D视觉机器人的应用场景广泛,前景广阔,设计思路注重多模态融合与感知能力的提升。
应用场景:
- 高校实训:DeepSeek与3D视觉机器人结合,可以为学生搭建实践平台,使他们深入理解具身智能的原理和应用,培养专业技能和创新思维1。
- 智能制造:在制造业中,这种机器人可用于生产流程优化、质量控制、设备维护等环节,通过实时监控和分析生产数据,提高生产效率和质量2。
- 医疗健康:利用AI技术辅助医疗诊断、制定个性化治疗方案以及药物研发等。DeepSeek的大模型可以分析海量医疗影像数据,精准识别病症特征,为医生提供诊断参考34。
- 城市治理:通过AI技术优化城市管理,提高城市运行效率。具体应用场景包括智能交通管理系统、城市安全问题监测与预警等4。
前景:
DeepSeek+3D视觉机器人的前景非常广阔。随着人工智能技术的不断发展和普及,这种机器人将在更多领域得到应用,推动产业升级和智能化转型。特别是在智能制造、医疗健康、城市治理等领域,这种机器人将发挥越来越重要的作用,成为推动社会进步和发展的重要力量。
简单设计思路:
- 多模态融合:设计时应注重多模态数据的融合,包括听觉、视觉、触觉等,以提高机器人的感知能力和适应性1。
- 感知与理解:通过DeepSeek模型和深度学习算法,实现对自然语言指令的理解、物体识别和抓取、路径规划以及任务执行的完整流程1。
- 3D视觉技术:采用3D深度相机等先进技术,为机器人提供精确的感知能力,使其能够准确地识别物体的形状、位置和姿态,构建出三维空间模型1。
- 反馈与学习:设计闭环的反馈学习机制,使机器人能够不断学习和优化自己的行为决策,提高工作效率和准确性。
综上所述,DeepSeek+3D视觉机器人在多个领域都有广泛的应用场景和广阔的前景,其设计思路注重多模态融合与感知能力的提升,以满足不同领域的需求和挑战。
相关文章:

DeepSeek+3D视觉机器人应用场景、前景和简单设计思路
DeepSeek3D视觉机器人在多个领域具有广泛的应用场景和巨大的前景。以下是详细的分析: 应用场景 制造业 自动化装配:机器人可以精确地抓取和装配零件,提高生产效率和产品质量。 质量检测:通过3D视觉技术检测产品缺陷,确…...

STM32+Proteus+DS18B20数码管仿真实验
1. 实验准备 硬件方面: 了解 STM32 单片机的基本原理和使用方法,本实验可选用常见的 STM32F103 系列。熟悉 DS18B20 温度传感器的工作原理和通信协议(单总线协议)。数码管可选用共阴极或共阳极数码管,用于显示温度值。…...

Java自动生成api文档
在 Java 开发中,自动生成 API 文档是一项非常实用的功能,它能帮助开发者快速了解项目中的类、方法、参数等信息。以下为你介绍几种常见的 Java 自动生成 API 文档的方式: 1. 使用 Javadoc Javadoc 是 Java 自带的工具,它可以从 J…...

PHP的JIT编译器
【图书介绍】《ThinkPHP 8高效构建Web应用》-CSDN博客 《2025新书 ThinkPHP 8高效构建Web应用 编程与应用开发丛书 夏磊 清华大学出版社教材书籍 9787302678236 ThinkPHP 8高效构建Web应用》【摘要 书评 试读】- 京东图书 PHP是一种广泛使用的脚本语言,被用于构建…...

Golang学习历程【第七篇 闭包type defer panic recover了解time包】
Golang学习历程【第七篇 闭包&type defer panic recover了解】 1. 闭包1.1 闭包的定义1.2 闭包的特点1.3 闭包的示例 2. 类型(type)2.1 自定义类型2.2 类型示例 3. 延迟执行(Defer)3.1 defer 的用法3.2 defer 示例 4. 恐慌(Panic…...

oracle表分区--范围分区
文章目录 oracle表分区分区的原因分区的优势oracle表分区的作用oracle表分区类型一、范围分区二、 创建分区表和使用:1、按照数值范围划分2、按照时间范围3、MAXVALUE2. 向现有表添加新的分区3、 分区维护和重新组织(合并/删除) oracle表分区…...

使用亚马逊针对 PyTorch 和 MinIO 的 S3 连接器进行模型检查点处理
2023 年 11 月,Amazon 宣布推出适用于 PyTorch 的 S3 连接器。适用于 PyTorch 的 Amazon S3 连接器提供了专为 S3 对象存储构建的 PyTorch 数据集基元(数据集和数据加载器)的实现。它支持用于随机数据访问模式的地图样式数据集和用于流式处理…...

Ubuntu 下 nginx-1.24.0 源码分析 - ngx_monotonic_time函数
声明 在 src\core\ngx_times.c 中: static ngx_msec_t ngx_monotonic_time(time_t sec, ngx_uint_t msec); 实现 在 src\core\ngx_times.c 中: static ngx_msec_t ngx_monotonic_time(time_t sec, ngx_uint_t msec) { #if (NGX_HAVE_CLOCK_MONOTONIC)st…...

业务开发 | 基础知识 | Maven 快速入门
Maven 快速入门 1.Maven 全面概述 Apache Maven 是一种软件项目管理和理解工具。基于项目对象模型的概念(POM),Maven 可以从中央信息中管理项目的构建,报告和文档。 2.Maven 基本功能 因此实际上 Maven 的基本功能就是作为 Ja…...
、JavaScript、HTML 和 CSS 实现前后端交互的详细开发过程)
基于 Python(Flask)、JavaScript、HTML 和 CSS 实现前后端交互的详细开发过程
以下是一个基于 Python(Flask)、JavaScript、HTML 和 CSS 实现前后端交互的详细开发过程: --- ### 一、技术选型 1. **后端**:Python Flask(轻量级Web框架) 2. **前端**:HTML/CSS JavaScript&…...

STM32 RCC功能说明 复位和时钟控制RCC
目录 背景 RCC配置时钟主要涉及两方面 程序 第1步、RCC默认初始化 第2步、等待HSE工作稳定 第3步、设置PLL时钟源以及倍频数 第4步、设置AHB总线时钟(HCLK) 第5步、设置PCLK1(APB1总线) 第6步、设置PCLK2(APB2总线) 第7步、FLASH存储器的配置 …...

Windows可以永久暂停更新了
最终效果图: 第一步: winR组合键打开运行对话框,输入“regedit”,点击“确定”或回车: 第二步: 注册表定位到“\HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\WindowsUpdate\UX\Settings”,新建DWO…...

高级 Python Web 开发:基于 FastAPI 构建高效实时聊天系统与并发控制
高级 Python Web 开发:基于 FastAPI 构建高效实时聊天系统与并发控制 目录 🌐 WebSocket 实时通讯概述💬 FastAPI 中实现 WebSocket 聊天系统🔧 WebSocket 并发控制与性能优化🔒 WebSocket 安全性与认证机制…...

深入理解Java虚拟机(JVM)
JVM概述 JVM作用 java虚拟机负责装载字节码到其内部,解释/编译为对应平台上的机器码指令执行,通俗说就是将字节码转换为机器码 JVM内部构造 1、类加载部分:负责把硬盘上的字节码加载到内存中(运行时数据区) 2、运…...

笔试面试——逻辑题
1.n从1开始,每个操作可以选择对n加1或者对n加倍,若想获得整数2014,最少需要多少个操作。 2.一个池塘,养龙虾若干,请想一个办法尽量准确的估算其中有多少龙虾? 3. S先生,P先生,Q先生他们知道桌子…...

【深度学习入门实战】基于Keras的手写数字识别实战(附完整可视化分析)
本人主页:机器学习司猫白 ok,话不多说,我们进入正题吧 项目概述 本案例使用经典的MNIST手写数字数据集,通过Keras构建全连接神经网络,实现0-9数字的分类识别。文章将包含: 关键概念图解完整实现代码训练过程可视化模型效果深度分析环境准备 import numpy as np impo…...

软考高级《系统架构设计师》知识点(一)
计算机硬件 校验码 码距:就单个编码A:00而言,其码距为1,因为其只需要改变一位就变成另一个编码。在两个编码中,从A码到B码转换所需要改变的位数称为码距,如A:00要转换为B:11,码距为2。一般来说,…...

用大模型学大模型01-制定学习计划
提示词:我想学习大模型,需要AI制定一个完整的学习计划,并给出学习路径和学习资料。以教科书目录的方式给出学习路线 第1章:数学与编程基础(4-6周) 1.1 数学基础 线性代数(矩阵运算、特征值分…...

lvs的DR模式
基于Linux的负载均衡集群软件 LVS 全称为Linux Virtual Server,是一款开源的四层(传输层)负载均衡软件 Nginx 支持四层和七层(应用层)负载均衡 HAProxy 和Nginx一样,也可同时支持四层和七层(应用层)负载均衡 基于Linux的高可用集群软件 Keepalived Keepalived是Linux…...

mysql读写分离与proxysql的结合
上一篇文章介绍了mysql如何设置成主从复制模式,而主从复制的目的,是为了读写分离。 读写分离,拿spring boot项目来说,可以有2种方式: 1)设置2个数据源,读和写分开使用 2)使用中间件…...
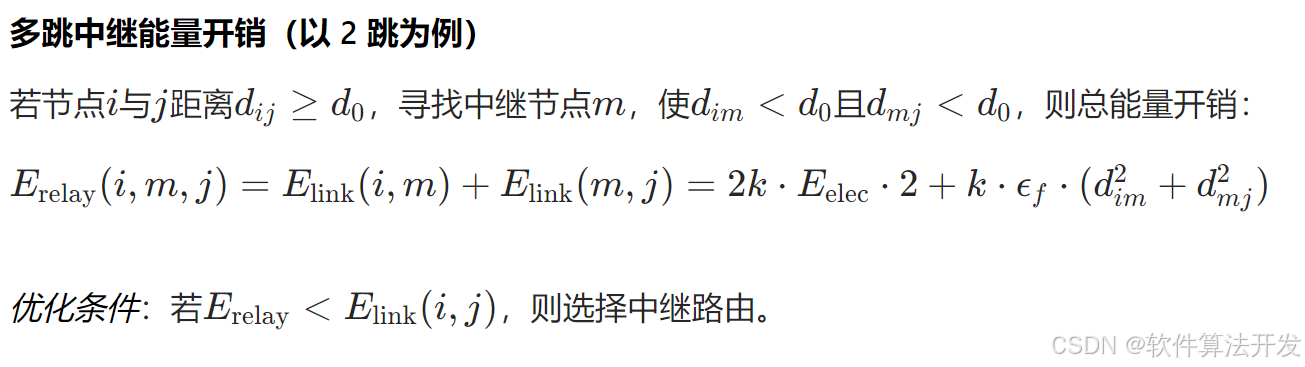
基于距离变化能量开销动态调整的WSN低功耗拓扑控制开销算法matlab仿真
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.算法仿真参数 5.算法理论概述 6.参考文献 7.完整程序 1.程序功能描述 通过动态调整节点通信的能量开销,平衡网络负载,延长WSN生命周期。具体通过建立基于距离的能量消耗模型&am…...
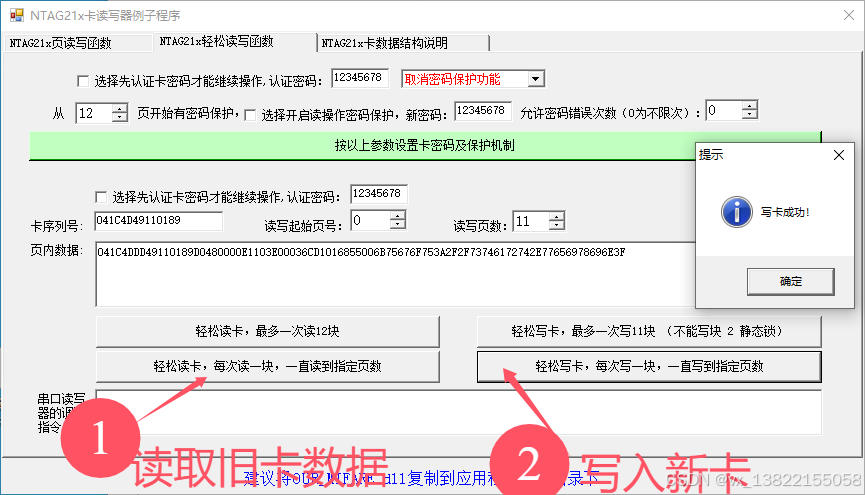
VB.net复制Ntag213卡写入UID
本示例使用的发卡器:https://item.taobao.com/item.htm?ftt&id615391857885 一、读取旧Ntag卡的UID和数据 Private Sub Button15_Click(sender As Object, e As EventArgs) Handles Button15.Click轻松读卡技术支持:网站:Dim i, j As IntegerDim cardidhex, …...
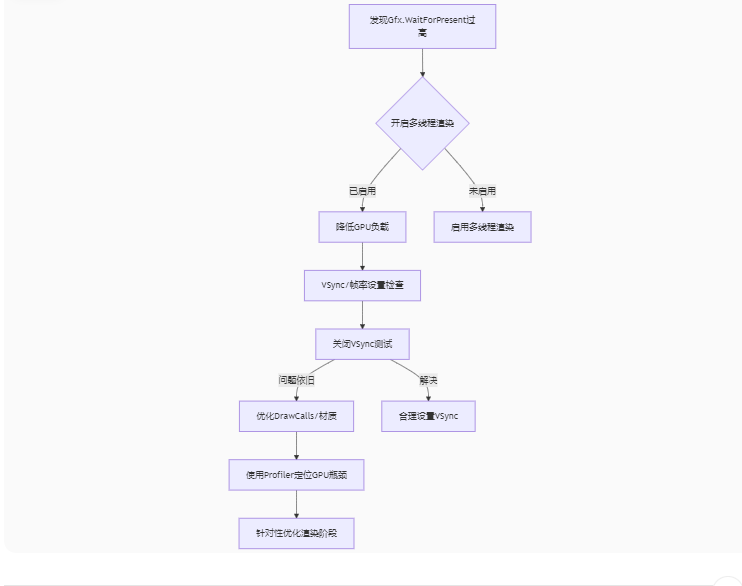
Unity3D中Gfx.WaitForPresent优化方案
前言 在Unity中,Gfx.WaitForPresent占用CPU过高通常表示主线程在等待GPU完成渲染(即CPU被阻塞),这表明存在GPU瓶颈或垂直同步/帧率设置问题。以下是系统的优化方案: 对惹,这里有一个游戏开发交流小组&…...

中南大学无人机智能体的全面评估!BEDI:用于评估无人机上具身智能体的综合性基准测试
作者:Mingning Guo, Mengwei Wu, Jiarun He, Shaoxian Li, Haifeng Li, Chao Tao单位:中南大学地球科学与信息物理学院论文标题:BEDI: A Comprehensive Benchmark for Evaluating Embodied Agents on UAVs论文链接:https://arxiv.…...
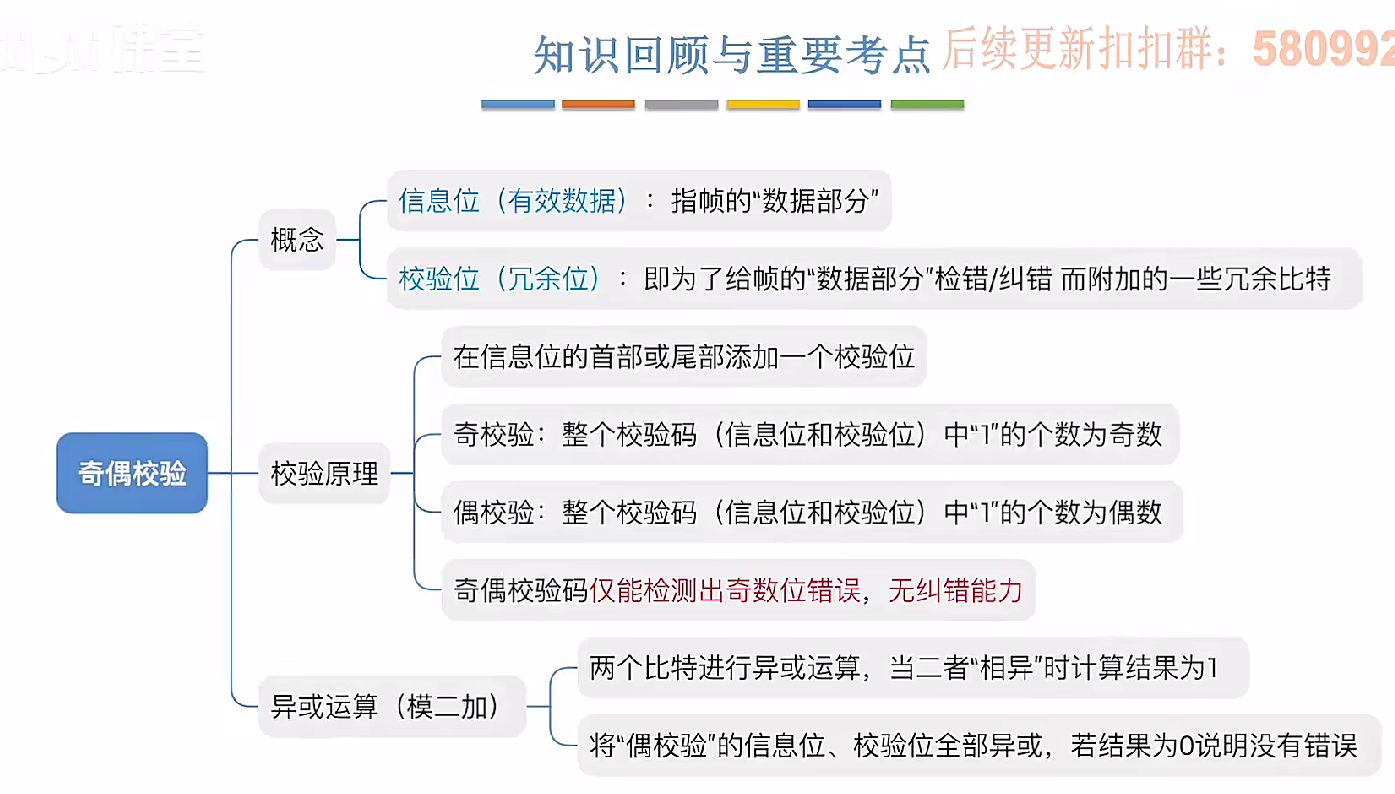
3.3.1_1 检错编码(奇偶校验码)
从这节课开始,我们会探讨数据链路层的差错控制功能,差错控制功能的主要目标是要发现并且解决一个帧内部的位错误,我们需要使用特殊的编码技术去发现帧内部的位错误,当我们发现位错误之后,通常来说有两种解决方案。第一…...

AtCoder 第409场初级竞赛 A~E题解
A Conflict 【题目链接】 原题链接:A - Conflict 【考点】 枚举 【题目大意】 找到是否有两人都想要的物品。 【解析】 遍历两端字符串,只有在同时为 o 时输出 Yes 并结束程序,否则输出 No。 【难度】 GESP三级 【代码参考】 #i…...
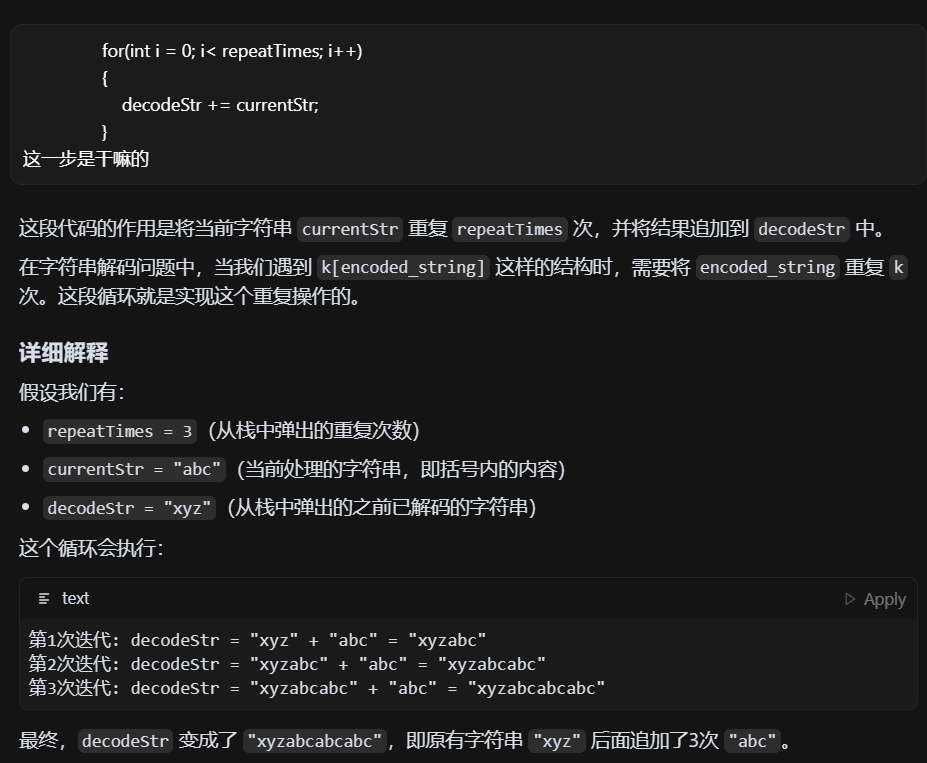
LeetCode - 394. 字符串解码
题目 394. 字符串解码 - 力扣(LeetCode) 思路 使用两个栈:一个存储重复次数,一个存储字符串 遍历输入字符串: 数字处理:遇到数字时,累积计算重复次数左括号处理:保存当前状态&a…...
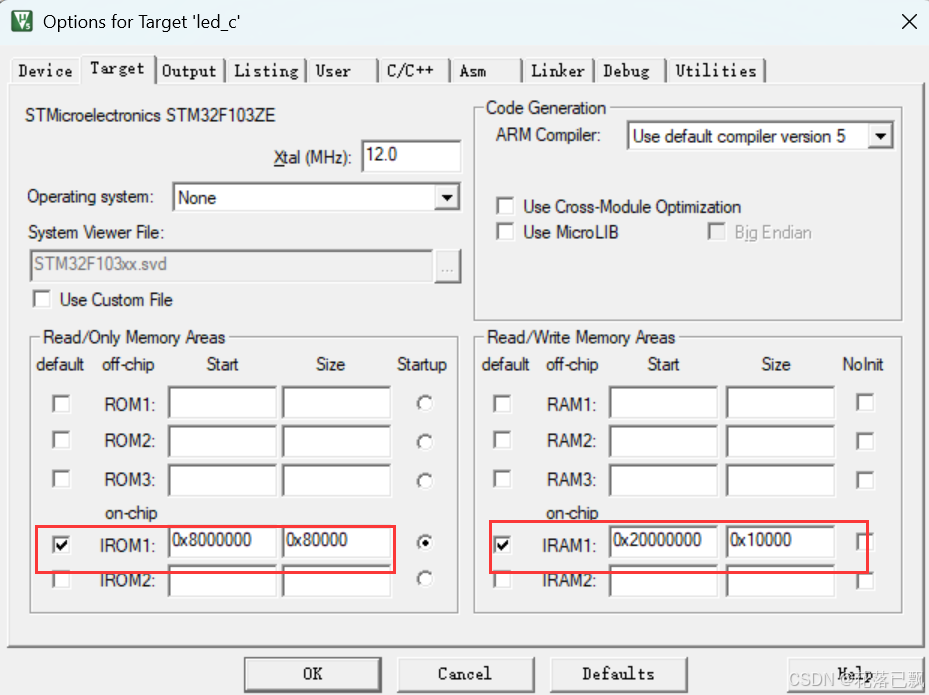
Keil 中设置 STM32 Flash 和 RAM 地址详解
文章目录 Keil 中设置 STM32 Flash 和 RAM 地址详解一、Flash 和 RAM 配置界面(Target 选项卡)1. IROM1(用于配置 Flash)2. IRAM1(用于配置 RAM)二、链接器设置界面(Linker 选项卡)1. 勾选“Use Memory Layout from Target Dialog”2. 查看链接器参数(如果没有勾选上面…...

OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别
OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别 直接训练提示词嵌入向量的核心区别 您提到的代码: prompt_embedding = initial_embedding.clone().requires_grad_(True) optimizer = torch.optim.Adam([prompt_embedding...
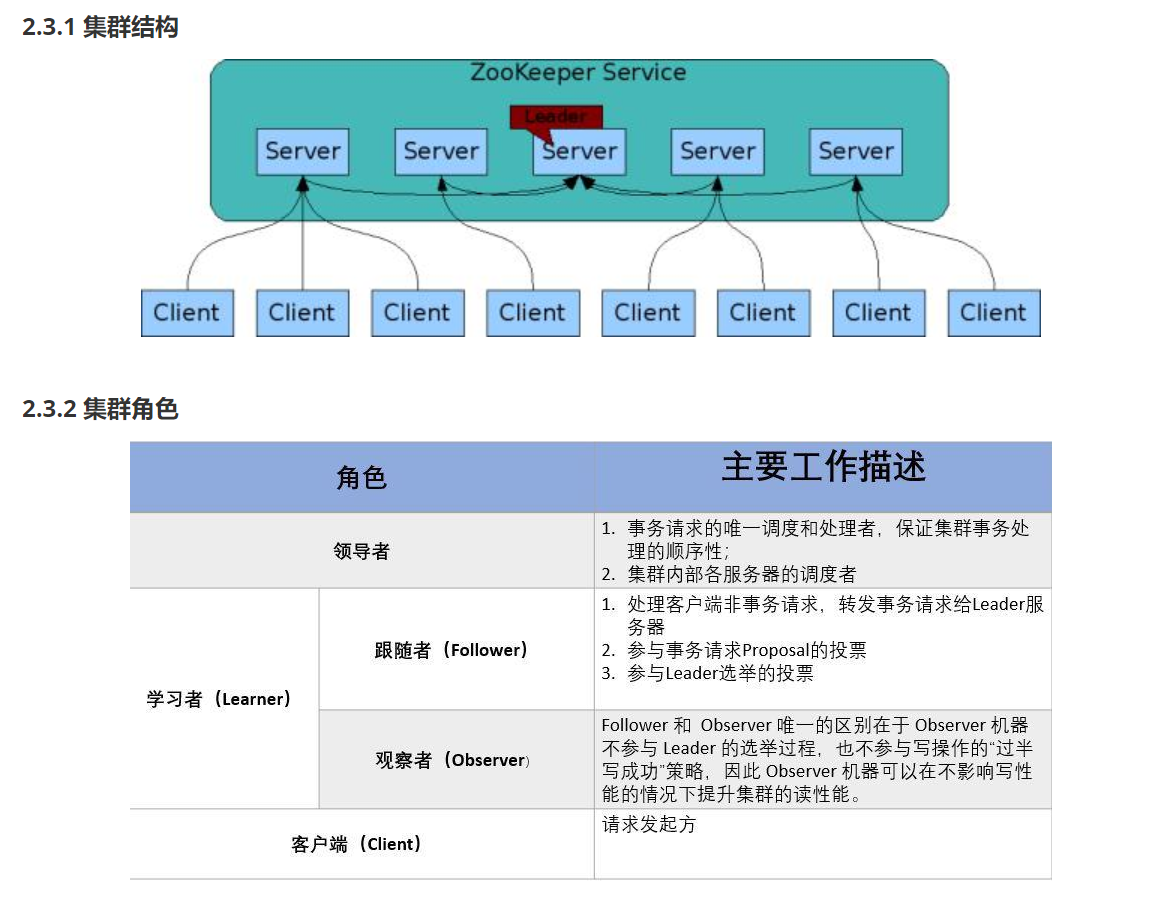
HDFS分布式存储 zookeeper
hadoop介绍 狭义上hadoop是指apache的一款开源软件 用java语言实现开源框架,允许使用简单的变成模型跨计算机对大型集群进行分布式处理(1.海量的数据存储 2.海量数据的计算)Hadoop核心组件 hdfs(分布式文件存储系统)&a…...