多视图几何--结构恢复--三角测量
三角测量
1. 核心公式推导
假设两个相机的投影矩阵为 P P P 和 P ′ P' P′,对应的匹配图像点(同名点)为 ( u , v ) (u, v) (u,v) 和 ( u ′ , v ′ ) (u', v') (u′,v′),目标是求解三维点 X = [ X x , X y , X z , 1 ] T X = [X_x, X_y, X_z, 1]^T X=[Xx,Xy,Xz,1]T(齐次坐标)。
投影方程
每个相机的投影方程可以表示为:
{ u = P 00 X x + P 01 X y + P 02 X z + P 03 P 20 X x + P 21 X y + P 22 X z + P 23 v = P 10 X x + P 11 X y + P 12 X z + P 13 P 20 X x + P 21 X y + P 22 X z + P 23 u ′ = P 00 ′ X x + P 01 ′ X y + P 02 ′ X z + P 03 ′ P 20 ′ X x + P 21 ′ X y + P 22 ′ X z + P 23 ′ v ′ = P 10 ′ X x + P 11 ′ X y + P 12 ′ X z + P 13 ′ P 20 ′ X x + P 21 ′ X y + P 22 ′ X z + P 23 ′ \begin{cases} u = \frac{P_{00}X_x + P_{01}X_y + P_{02}X_z + P_{03}}{P_{20}X_x + P_{21}X_y + P_{22}X_z + P_{23}} \\ v = \frac{P_{10}X_x + P_{11}X_y + P_{12}X_z + P_{13}}{P_{20}X_x + P_{21}X_y + P_{22}X_z + P_{23}} \\ u' = \frac{P'_{00}X_x + P'_{01}X_y + P'_{02}X_z + P'_{03}}{P'_{20}X_x + P'_{21}X_y + P'_{22}X_z + P'_{23}} \\ v' = \frac{P'_{10}X_x + P'_{11}X_y + P'_{12}X_z + P'_{13}}{P'_{20}X_x + P'_{21}X_y + P'_{22}X_z + P'_{23}} \\ \end{cases} ⎩ ⎨ ⎧u=P20Xx+P21Xy+P22Xz+P23P00Xx+P01Xy+P02Xz+P03v=P20Xx+P21Xy+P22Xz+P23P10Xx+P11Xy+P12Xz+P13u′=P20′Xx+P21′Xy+P22′Xz+P23′P00′Xx+P01′Xy+P02′Xz+P03′v′=P20′Xx+P21′Xy+P22′Xz+P23′P10′Xx+P11′Xy+P12′Xz+P13′
消去分母
将分母移到等式左边,得到四个线性方程:
{ u ( P 20 X x + P 21 X y + P 22 X z + P 23 ) = P 00 X x + P 01 X y + P 02 X z + P 03 v ( P 20 X x + P 21 X y + P 22 X z + P 23 ) = P 10 X x + P 11 X y + P 12 X z + P 13 u ′ ( P 20 ′ X x + P 21 ′ X y + P 22 ′ X z + P 23 ′ ) = P 00 ′ X x + P 01 ′ X y + P 02 ′ X z + P 03 ′ v ′ ( P 20 ′ X x + P 21 ′ X y + P 22 ′ X z + P 23 ′ ) = P 10 ′ X x + P 11 ′ X y + P 12 ′ X z + P 13 ′ \begin{cases} u (P_{20}X_x + P_{21}X_y + P_{22}X_z + P_{23}) = P_{00}X_x + P_{01}X_y + P_{02}X_z + P_{03} \\ v (P_{20}X_x + P_{21}X_y + P_{22}X_z + P_{23}) = P_{10}X_x + P_{11}X_y + P_{12}X_z + P_{13} \\ u' (P'_{20}X_x + P'_{21}X_y + P'_{22}X_z + P'_{23}) = P'_{00}X_x + P'_{01}X_y + P'_{02}X_z + P'_{03} \\ v' (P'_{20}X_x + P'_{21}X_y + P'_{22}X_z + P'_{23}) = P'_{10}X_x + P'_{11}X_y + P'_{12}X_z + P'_{13} \\ \end{cases} ⎩ ⎨ ⎧u(P20Xx+P21Xy+P22Xz+P23)=P00Xx+P01Xy+P02Xz+P03v(P20Xx+P21Xy+P22Xz+P23)=P10Xx+P11Xy+P12Xz+P13u′(P20′Xx+P21′Xy+P22′Xz+P23′)=P00′Xx+P01′Xy+P02′Xz+P03′v′(P20′Xx+P21′Xy+P22′Xz+P23′)=P10′Xx+P11′Xy+P12′Xz+P13′
矩阵形式
将上述方程整理为齐次方程组 A ⋅ X = 0 A \cdot X = 0 A⋅X=0,其中系数矩阵 A A A 的每一行对应一个方程:
A = [ u P 2 − P 0 v P 2 − P 1 u ′ P 2 ′ − P 0 ′ v ′ P 2 ′ − P 1 ′ ] A = \begin{bmatrix} u P_{2} - P_{0} \\ v P_{2} - P_{1} \\ u' P'_{2} - P'_{0} \\ v' P'_{2} - P'_{1} \\ \end{bmatrix} A= uP2−P0vP2−P1u′P2′−P0′v′P2′−P1′
这里 P i P_{i} Pi 表示投影矩阵的第 i i i 行(如 P 0 = [ P 00 , P 01 , P 02 , P 03 ] P_{0} = [P_{00}, P_{01}, P_{02}, P_{03}] P0=[P00,P01,P02,P03]),进而通过SVD求解 X X X的齐次坐标。
2. 代码实现步骤
以下是基于公式的手动实现(Python + NumPy):
步骤1:构造系数矩阵 $ A $
def triangulate_point(P1, P2, pt1, pt2):"""P1, P2: 3x4 投影矩阵pt1, pt2: 匹配的二维点 (u, v)"""u1, v1 = pt1u2, v2 = pt2# 构造矩阵A的每一行row1 = u1 * P1[2, :] - P1[0, :] # u * P1[2] - P1[0]row2 = v1 * P1[2, :] - P1[1, :] # v * P1[2] - P1[1]row3 = u2 * P2[2, :] - P2[0, :] # u' * P2[2] - P2[0]row4 = v2 * P2[2, :] - P2[1, :] # v' * P2[2] - P2[1]A = np.vstack([row1, row2, row3, row4])return A
步骤2:SVD分解求解最小二乘解
def solve_svd(A):# 奇异值分解U, S, Vt = np.linalg.svd(A)# V的最后一列对应最小奇异值的解X = Vt[-1, :]# 归一化齐次坐标X = X / X[3]return X[:3] # 返回三维坐标 (X, Y, Z)
相关文章:

多视图几何--结构恢复--三角测量
三角测量 1. 核心公式推导 假设两个相机的投影矩阵为 P P P 和 P ′ P P′,对应的匹配图像点(同名点)为 ( u , v ) (u, v) (u,v) 和 ( u ′ , v ′ ) (u, v) (u′,v′),目标是求解三维点 X [ X x , X y , X z , 1 ] T X [X_x, X_y, X_z, 1]^T X…...

【Linux三剑客】awk命令使用
AWK 编程语言中的变量 AWK 提供了许多可在模式和操作中使用的内置变量。最常用的变量是 - NR - 表示当前记录(行)号 NF - 表示输入记录中的字段总数。 $0 - 整个当前记录。 $1, $2, $3, … - 当前记录中的第一个、第二个、第三个…字段。 查找passwd中…...

Python CATIA二次开发实战:CATIA产品号批量同步文件名工具开发
引言 在汽车/航空制造领域,CATIA文件的结构化管理直接影响着PLM系统数据一致性。笔者近期开发的增强型产品号同步工具,成功解决了工程实践中文件名与产品名称不同步的痛点问题。本文将从技术实现、功能亮点、应用场景三个维度进行深度解析。 一、技术方…...

我的两个医学数据分析技术思路
我的两个医学数据分析技术思路 从临床上获得的或者公共数据库数据这种属于观察性研究,是对临床诊疗过程中自然产生的数据进行分析而获得疾病发生发展的规律等研究成果。再细分,可以分为独立危险因素鉴定和预测模型构建两种。 独立危险因素鉴定是一直以…...
操作系统之进程状态、优先级和切换与调度
文章目录 1. 进程状态1.1 课本名词提炼1.2 运行&阻塞&挂起1.2.1 运行1.2.2 阻塞1.2.3 挂起 1.3 理解内核链表1.4 Linux中的内核解释1.5 进程状态的查看1.6 Z(zombie)——僵尸进程1.6.1 创建僵尸进程1.6.2 僵尸进程的危害 1.7 孤儿进程 2. 进程优先级2.1 基本概念2.2 查…...
[免费]微信小程序(图书馆)自习室座位预约管理系统(SpringBoot后端+Vue管理端)(高级版)【论文+源码+SQL脚本】
大家好,我是java1234_小锋老师,看到一个不错的微信小程序(图书馆)自习室座位预约管理系统(SpringBoot后端Vue管理端)(高级版),分享下哈。 项目视频演示 【免费】微信小程序(图书馆)自习室座位预约管理系统(SpringBoot后端Vue管理端)(高级版…...

你使用过哪些 Java 并发工具类?
你的回答(口语化,面试场景) 面试官:你使用过哪些 Java 并发工具类? 你: 好的,我结合项目经验来说说常用的并发工具类: CountDownLatch 作用:等所有线程就绪后再触发任务…...

模板方法模式的C++实现示例
核心思想 模板方法设计模式是一种行为设计模式,它定义了一个算法的框架,并将某些步骤的具体实现延迟到子类中。通过这种方式,模板方法模式允许子类在不改变算法结构的情况下重新定义算法的某些步骤。 模板方法模式的核心在于: …...

国产编辑器EverEdit - 脚本(解锁文本编辑的无限可能)
1 脚本 1.1 应用场景 脚本是一种功能扩展代码,用于提供一些编辑器通用功能提供不了的功能,帮助用户在特定工作场景下提高工作效率,几乎所有主流的编辑器、IDE都支持脚本。 EverEdit的脚本支持js(语法与javascript类似)、VBScript两种编程…...

越早越好!8 个反直觉的金钱真相|金钱心理学
很多人都追求财富自由,但成功的人少之又少。 这可能是因为,人们往往忽略了一些金钱的真相和常识。 01 金钱常识 & 真相 为了构建健康的金钱观,我读了一本有点反直觉,有点像鸡汤,但都是财富真相的书。 来自 Morg…...

linux docker相关指令
1、镜像操作 0)、搜索:docker search 镜像名称 1)、拉取:docker pull 2)、推送:docker push 3)、查看:docker images 4)、查看所有镜像ID:d…...

实时采集到的语音进行语音识别
要在.NET Framework 4.8中使用C#实现离线实时语音识别,可以使用开源库Vosk(支持离线ASR)配合音频处理库NAudio。 步骤 1:安装依赖库 1.1. 安装NuGet包: - Install-Package NAudio(处理音频输入)…...

Ollama 本地部署 DeepSeek R1 及 Python 运行 open-webui 界面(windows)
DeepSeek R1 ollama open-webui 本地部署(windows) DeepSeek-R1本地部署配置要求 Github地址:https://github.com/deepseek-ai/DeepSeek-R1?tabreadme-ov-file 模型规模最低 GPU 显存推荐 GPU 型号纯 CPU 内存需求适用场景1.5B4GBRTX 3…...

牛客周赛:84:C:JAVA
链接:登录—专业IT笔试面试备考平台_牛客网 来源:牛客网 题目描述 \hspace{15pt}本题为《D.小红的陡峭值(三)》的简单版本,两题的唯一区别在于本题的数据范围更小。 \hspace{15pt}小红定义一个字符串的陡峭值为&a…...

5. 前后端实现文件上传与解析
1. 说明 在实际开发中,比较常见的一个功能是需要在前端页面中选择系统中的某个文件上传到服务器中进行解析,解析后的文件内容可以用来在服务器中当作参数,或者传递给其它组件使用,或者需要存储到数据库中。所以本文就提供一种方式…...

SpringBoot 接入 豆包 火山方舟大模型
火山方舟控制台 开通模型推理、知识库 应用入口; 文档中心 各类接口说明及SDK 获取; 向量数据库VikingDB 文档 下翻找到有java操作案例; 实现目标功能效果: 通过SDK调用 豆包大模型,在代码内实现问答的效果…...

IDEA接入阿里云百炼中免费的通义千问[2025版]
安装deepseek 上一篇文章IDEA安装deepseek最新教程2025中说明了怎么用idea安装codeGPT插件,并接入DeepSeek,无奈接入的官方api已经不能使用了,所以我们尝试从其他地方接入 阿里云百炼https://bailian.console.aliyun.com/ 阿里云百炼是阿…...

下载kali linux遇到的一些问题
kali官网:kali官网跳转 问题一:未启动VM Service VMware Workstation 未能启动 VMware Authorization Service。您可以尝试手动启动VMware Authorization Service。如果此问题仍然存在,请联系VMware 支持部门。 解决办法: 步骤1…...

常见排序算法深度评测:从原理到10万级数据实战
常见排序算法深度评测:从原理到10万级数据实战 摘要 本文系统解析冒泡排序、选择排序、插入排序、希尔排序、归并排序、快速排序、堆排序和基数排序8种经典算法,通过C语言实现10万随机数排序并统计耗时。测试显示:快速排序综合性能最优&…...
使用详解)
Scaled_dot_product_attention(SDPA)使用详解
在学习huggingFace的Transformer库时,我们不可避免会遇到scaled_dot_product_attention(SDPA)这个函数,它被用来加速大模型的Attention计算,本文就详细介绍一下它的使用方法,核心内容主要参考了torch.nn.functional中该函数的注释…...
第19节 Node.js Express 框架
Express 是一个为Node.js设计的web开发框架,它基于nodejs平台。 Express 简介 Express是一个简洁而灵活的node.js Web应用框架, 提供了一系列强大特性帮助你创建各种Web应用,和丰富的HTTP工具。 使用Express可以快速地搭建一个完整功能的网站。 Expre…...

[2025CVPR]DeepVideo-R1:基于难度感知回归GRPO的视频强化微调框架详解
突破视频大语言模型推理瓶颈,在多个视频基准上实现SOTA性能 一、核心问题与创新亮点 1.1 GRPO在视频任务中的两大挑战 安全措施依赖问题 GRPO使用min和clip函数限制策略更新幅度,导致: 梯度抑制:当新旧策略差异过大时梯度消失收敛困难:策略无法充分优化# 传统GRPO的梯…...
超短脉冲激光自聚焦效应
前言与目录 强激光引起自聚焦效应机理 超短脉冲激光在脆性材料内部加工时引起的自聚焦效应,这是一种非线性光学现象,主要涉及光学克尔效应和材料的非线性光学特性。 自聚焦效应可以产生局部的强光场,对材料产生非线性响应,可能…...

应用升级/灾备测试时使用guarantee 闪回点迅速回退
1.场景 应用要升级,当升级失败时,数据库回退到升级前. 要测试系统,测试完成后,数据库要回退到测试前。 相对于RMAN恢复需要很长时间, 数据库闪回只需要几分钟。 2.技术实现 数据库设置 2个db_recovery参数 创建guarantee闪回点,不需要开启数据库闪回。…...
)
椭圆曲线密码学(ECC)
一、ECC算法概述 椭圆曲线密码学(Elliptic Curve Cryptography)是基于椭圆曲线数学理论的公钥密码系统,由Neal Koblitz和Victor Miller在1985年独立提出。相比RSA,ECC在相同安全强度下密钥更短(256位ECC ≈ 3072位RSA…...

多模态商品数据接口:融合图像、语音与文字的下一代商品详情体验
一、多模态商品数据接口的技术架构 (一)多模态数据融合引擎 跨模态语义对齐 通过Transformer架构实现图像、语音、文字的语义关联。例如,当用户上传一张“蓝色连衣裙”的图片时,接口可自动提取图像中的颜色(RGB值&…...
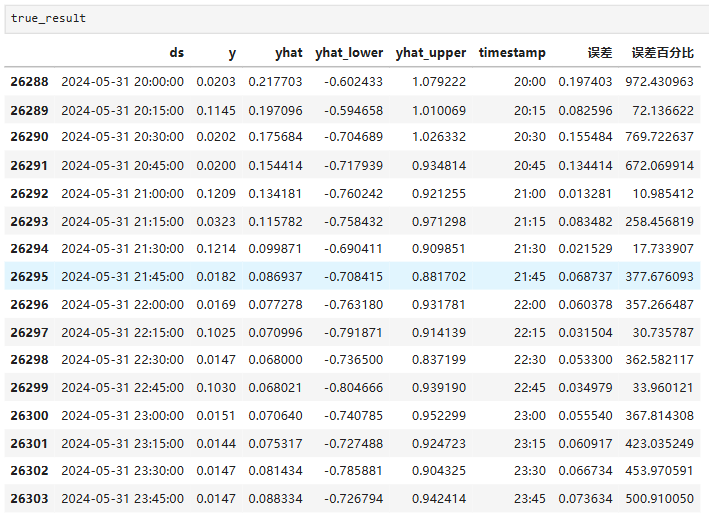
Python实现prophet 理论及参数优化
文章目录 Prophet理论及模型参数介绍Python代码完整实现prophet 添加外部数据进行模型优化 之前初步学习prophet的时候,写过一篇简单实现,后期随着对该模型的深入研究,本次记录涉及到prophet 的公式以及参数调优,从公式可以更直观…...
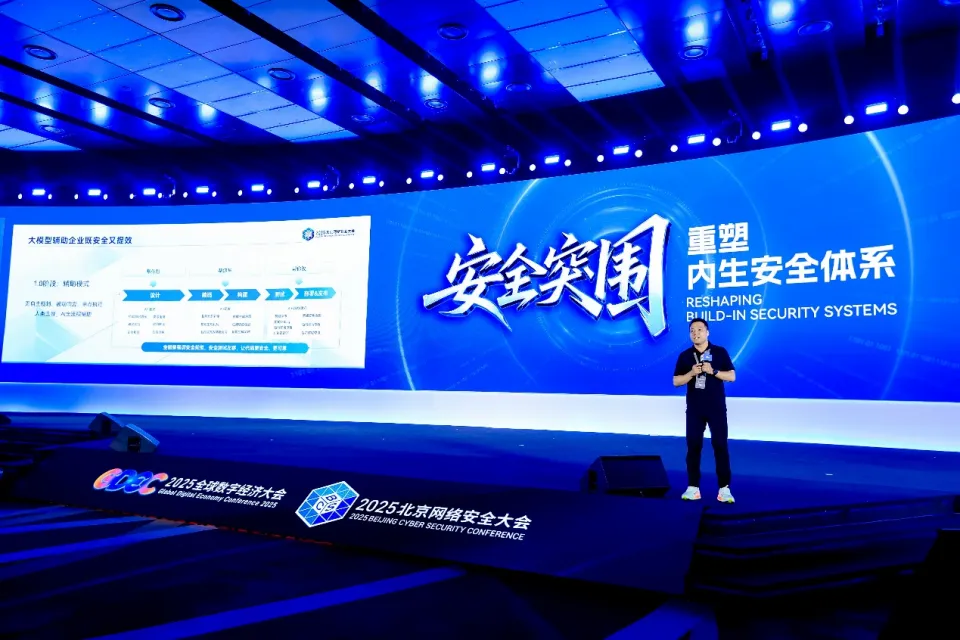
BCS 2025|百度副总裁陈洋:智能体在安全领域的应用实践
6月5日,2025全球数字经济大会数字安全主论坛暨北京网络安全大会在国家会议中心隆重开幕。百度副总裁陈洋受邀出席,并作《智能体在安全领域的应用实践》主题演讲,分享了在智能体在安全领域的突破性实践。他指出,百度通过将安全能力…...

什么?连接服务器也能可视化显示界面?:基于X11 Forwarding + CentOS + MobaXterm实战指南
文章目录 什么是X11?环境准备实战步骤1️⃣ 服务器端配置(CentOS)2️⃣ 客户端配置(MobaXterm)3️⃣ 验证X11 Forwarding4️⃣ 运行自定义GUI程序(Python示例)5️⃣ 成功效果
项目部署到Linux上时遇到的错误(Redis,MySQL,无法正确连接,地址占用问题)
Redis无法正确连接 在运行jar包时出现了这样的错误 查询得知问题核心在于Redis连接失败,具体原因是客户端发送了密码认证请求,但Redis服务器未设置密码 1.为Redis设置密码(匹配客户端配置) 步骤: 1).修…...