STC15系列单片机通过串口多字节数据读写EEPROM操作
STC15系列单片机通过串口多字节数据读写EEPROM操作
- 📌相关篇《STC15系列单片机EEPROM读写示例》
⛳手册勘误信息注意事项
- ⚡在手册上面描述
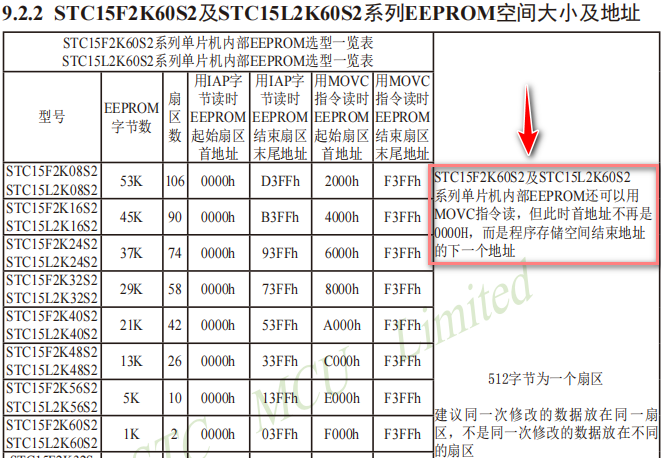
STC15F2K60S2及STC15L2K60S2系列单片机内部EEPROM还可以用MOVC指令读,但此时首地址不再是0000H,而是程序存储空间结束地址的下一个地址。 - 🔰实际上
STC15F2K60S2型号单片机验证时发现,EEPROM起始扇区首地址:0x0000-0x02002个扇区(1K=512X2),而不是像手册上描述的在CODE区后面的2个扇区。 - ⚡对于IAP型号的单片机,EEPROM扇区在CODE(程序区)后面。
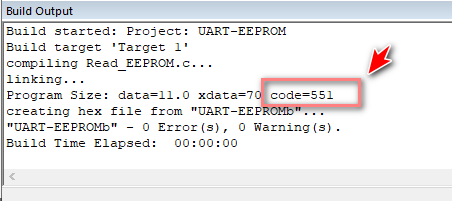
- 例如上面的程序编译信息,可以得知程序所占用的容量
code=551,转换为扇区,就是需要占用2个扇区(2 X 512),对于IAP单片机,整个ROM区都可以作为eeprom使用,在不覆盖程序的情况下,从第3扇区作为eeprom的首地址:0x600。
📝STC15系列单片机通过串口读写EEPROM示例
- ✨这里以
STC15F2K60S2为烧录对象为例。采用22.1184MHz,波特率:115200 - 程序代码
/*---------------------------------------------------------------------*/
/* --- STC MCU International Limited ----------------------------------*/
/* --- STC 1T Series MCU Demo Programme -------------------------------*/
/* --- Mobile: (86)13922805190 ----------------------------------------*/
/* --- Fax: 86-0513-55012956,55012947,55012969 ------------------------*/
/* --- Tel: 86-0513-55012928,55012929,55012966 ------------------------*/
/* --- Web: www.GXWMCU.com --------------------------------------------*/
/* --- QQ: 800003751 -------------------------------------------------*/
/* 如果要在程序中使用此代码,请在程序中注明使用了宏晶科技的资料及程序 */
/*---------------------------------------------------------------------*//************* 本程序功能说明 **************测试说明通过串口对STC内部自带的EEPROM(FLASH)进行读写测试。对FLASH做扇区擦除、写入、读出的操作,命令指定地址。默认波特率: 115200,8,N,1.
默认主时钟: 22118400HZ.串口命令设置: (命令字母不区分大小写)W 0x8000 1234567890 --> 对0x8000地址写入字符1234567890.R 0x8000 10 --> 对0x8000地址读出10个字节数据. 注意:为了通用,程序不识别地址是否有效,用户自己根据具体的型号来决定。******************************************/#define MAIN_Fosc 22118400L //定义主时钟
#include "STC15Fxxxx.H"#define Baudrate1 115200L
#define Tmp_Length 70 //读写EEPROM缓冲长度#define UART1_BUF_LENGTH (Tmp_Length+9) //串口缓冲长度u8 RX1_TimeOut;
u8 TX1_Cnt; //发送计数
u8 RX1_Cnt; //接收计数
bit B_TX1_Busy; //发送忙标志u8 xdata RX1_Buffer[UART1_BUF_LENGTH]; //接收缓冲
u8 xdata tmp[Tmp_Length]; //EEPROM操作缓冲void UART1_config(u8 brt); // 选择波特率, 2: 使用Timer2做波特率, 其它值: 使用Timer1做波特率.
void PrintString1(u8 *puts);
void UART1_TxByte(u8 dat);
void delay_ms(u8 ms);
u8 CheckData(u8 dat);
u16 GetAddress(void);
u8 GetDataLength(void);
void EEPROM_SectorErase(u16 EE_address);
void EEPROM_read_n(u16 EE_address,u8 *DataAddress,u8 length);
u8 EEPROM_write_n(u16 EE_address,u8 *DataAddress,u8 length);/********************* 主函数 *************************/
void main(void)
{u8 i,j;u16 addr;u8 status;P0M1 = 0; P0M0 = 0; //设置为准双向口P1M1 = 0; P1M0 = 0; //设置为准双向口P2M1 = 0; P2M0 = 0; //设置为准双向口P3M1 = 0; P3M0 = 0; //设置为准双向口P4M1 = 0; P4M0 = 0; //设置为准双向口P5M1 = 0; P5M0 = 0; //设置为准双向口P6M1 = 0; P6M0 = 0; //设置为准双向口P7M1 = 0; P7M0 = 0; //设置为准双向口UART1_config(1); // 选择波特率, 2: 使用Timer2做波特率, 其它值: 使用Timer1做波特率.EA = 1; //允许总中断PrintString1("STC15F2K60S2系列单片机EEPROM测试程序, 串口命令设置如下示例:\r\n"); //SUART1发送一个字符串PrintString1("W 0x8000 1234567890 --> 对0x8000地址写入字符1234567890.\r\n"); //SUART1发送一个字符串PrintString1("R 0x8000 10 --> 对0x8000地址读出10个字节数据.\r\n"); //SUART1发送一个字符串while(1){delay_ms(1);if(RX1_TimeOut > 0) //超时计数{if(--RX1_TimeOut == 0){// for(i=0; i<RX1_Cnt; i++) UART1_TxByte(RX1_Buffer[i]); //把收到的数据原样返回,用于测试status = 0xff; //状态给一个非0值if((RX1_Cnt >= 10) && (RX1_Buffer[1] == ' ') && (RX1_Buffer[8] == ' ')) //最短命令为10个字节{for(i=0; i<8; i++){if((RX1_Buffer[i] >= 'a') && (RX1_Buffer[i] <= 'z')) RX1_Buffer[i] = RX1_Buffer[i] - 'a' + 'A'; //小写转大写}addr = GetAddress();if(addr < 63488) //限制在0~123扇区{if(RX1_Buffer[0] == 'W') //写入N个字节{j = RX1_Cnt - 9;if(j > Tmp_Length) j = Tmp_Length; //越界检测EEPROM_SectorErase(addr); //擦除扇区i = EEPROM_write_n(addr,&RX1_Buffer[9],j); //写N个字节if(i == 0){PrintString1("已写入");if(j >= 100) {UART1_TxByte(j/100+'0'); j = j % 100;}if(j >= 10) {UART1_TxByte(j/10+'0'); j = j % 10;}UART1_TxByte(j%10+'0');PrintString1("字节数据!\r\n");}else PrintString1("写入错误!\r\n");status = 0; //命令正确}else if(RX1_Buffer[0] == 'R') //PC请求返回N字节EEPROM数据{j = GetDataLength();if(j > Tmp_Length) j = Tmp_Length; //越界检测if(j > 0){PrintString1("读出");UART1_TxByte(j/10+'0');UART1_TxByte(j%10+'0');PrintString1("个字节数\xfd据如下:\r\n");EEPROM_read_n(addr,tmp,j);for(i=0; i<j; i++) UART1_TxByte(tmp[i]);UART1_TxByte(0x0d);UART1_TxByte(0x0a);status = 0; //命令正确}}}}if(status != 0) PrintString1("命令错误!\r\n");RX1_Cnt = 0; //清除字节数}}}
}
//========================================================================//========================================================================
// 函数: void delay_ms(unsigned char ms)
// 描述: 延时函数。
// 参数: ms,要延时的ms数, 这里只支持1~255ms. 自动适应主时钟.
// 返回: none.
// 版本: VER1.0
// 日期: 2013-4-1
// 备注:
//========================================================================
void delay_ms(u8 ms)
{unsigned int i;do{i = MAIN_Fosc / 14000;while(--i) ; //14T per loop}while(--ms);
}//========================================================================
// 函数: u8 CheckData(u8 dat)
// 描述: 将字符"0~9,A~F或a~f"转成十六进制.
// 参数: dat: 要检测的字符.
// 返回: 0x00~0x0F为正确. 0xFF为错误.
// 版本: V1.0, 2012-10-22
//========================================================================
u8 CheckData(u8 dat)
{if((dat >= '0') && (dat <= '9')) return (dat-'0');if((dat >= 'A') && (dat <= 'F')) return (dat-'A'+10);return 0xff;
}//========================================================================
// 函数: u16 GetAddress(void)
// 描述: 计算各种输入方式的地址.
// 参数: 无.
// 返回: 16位EEPROM地址.
// 版本: V1.0, 2013-6-6
//========================================================================
u16 GetAddress(void)
{u16 address;u8 i,j;address = 0;if((RX1_Buffer[2] == '0') && (RX1_Buffer[3] == 'X')){for(i=4; i<8; i++){j = CheckData(RX1_Buffer[i]);if(j >= 0x10) return 65535; //erroraddress = (address << 4) + j;}return (address);}return 65535; //error
}/**************** 获取要读出数据的字节数 ****************************/
u8 GetDataLength(void)
{u8 i;u8 length;length = 0;for(i=9; i<RX1_Cnt; i++){if(CheckData(RX1_Buffer[i]) >= 10) break;length = length * 10 + CheckData(RX1_Buffer[i]);}return (length);
}//========================================================================
// 函数: void PrintString1(u8 *puts)
// 描述: 串口1发送字符串函数。
// 参数: puts: 字符串指针.
// 返回: none.
// 版本: VER1.0
// 日期: 2014-11-28
// 备注:
//========================================================================
void PrintString1(u8 *puts) //发送一个字符串
{for (; *puts != 0; puts++) UART1_TxByte(*puts); //遇到停止符0结束
}//========================================================================
// 函数: SetTimer2Baudraye(u16 dat)
// 描述: 设置Timer2做波特率发生器。
// 参数: dat: Timer2的重装值.
// 返回: none.
// 版本: VER1.0
// 日期: 2014-11-28
// 备注:
//========================================================================
void SetTimer2Baudraye(u16 dat) // 选择波特率, 2: 使用Timer2做波特率, 其它值: 使用Timer1做波特率.
{AUXR &= ~(1<<4); //Timer stopAUXR &= ~(1<<3); //Timer2 set As TimerAUXR |= (1<<2); //Timer2 set as 1T modeTH2 = dat / 256;TL2 = dat % 256;IE2 &= ~(1<<2); //禁止中断AUXR |= (1<<4); //Timer run enable
}//========================================================================
// 函数: void UART1_config(u8 brt)
// 描述: UART1初始化函数。
// 参数: brt: 选择波特率, 2: 使用Timer2做波特率, 其它值: 使用Timer1做波特率.
// 返回: none.
// 版本: VER1.0
// 日期: 2014-11-28
// 备注:
//========================================================================
void UART1_config(u8 brt) // 选择波特率, 2: 使用Timer2做波特率, 其它值: 使用Timer1做波特率.
{/*********** 波特率使用定时器2 *****************/if(brt == 2){AUXR |= 0x01; //S1 BRT Use Timer2;SetTimer2Baudraye(65536UL - (MAIN_Fosc / 4) / Baudrate1);}/*********** 波特率使用定时器1 *****************/else{TR1 = 0;AUXR &= ~0x01; //S1 BRT Use Timer1;AUXR |= (1<<6); //Timer1 set as 1T modeTMOD &= ~(1<<6); //Timer1 set As TimerTMOD &= ~0x30; //Timer1_16bitAutoReload;TH1 = (u8)((65536UL - (MAIN_Fosc / 4) / Baudrate1) / 256);TL1 = (u8)((65536UL - (MAIN_Fosc / 4) / Baudrate1) % 256);ET1 = 0; //禁止中断INT_CLKO &= ~0x02; //不输出时钟TR1 = 1;}/*************************************************/SCON = (SCON & 0x3f) | 0x40; //UART1模式, 0x00: 同步移位输出, 0x40: 8位数据,可变波特率, 0x80: 9位数据,固定波特率, 0xc0: 9位数据,可变波特率
// PS = 1; //高优先级中断ES = 1; //允许中断REN = 1; //允许接收P_SW1 &= 0x3f;P_SW1 |= 0x00; //UART1 switch to, 0x00: P3.0 P3.1, 0x40: P3.6 P3.7, 0x80: P1.6 P1.7 (必须使用内部时钟)
// PCON2 |= (1<<4); //内部短路RXD与TXD, 做中继, ENABLE,DISABLEB_TX1_Busy = 0;TX1_Cnt = 0;RX1_Cnt = 0;RX1_TimeOut = 0;
}//========================================================================
// 函数: void UART1_TxByte(u8 dat)
// 描述: 发送一个字节.
// 参数: 无.
// 返回: 无.
// 版本: V1.0, 2014-6-30
//========================================================================void UART1_TxByte(u8 dat)
{SBUF = dat;B_TX1_Busy = 1;while(B_TX1_Busy);
}//========================================================================
// 函数: void UART1_int (void) interrupt UART1_VECTOR
// 描述: UART1中断函数。
// 参数: nine.
// 返回: none.
// 版本: VER1.0
// 日期: 2014-11-28
// 备注:
//========================================================================
void UART1_int (void) interrupt UART1_VECTOR
{if(RI){RI = 0;if(RX1_Cnt >= UART1_BUF_LENGTH) RX1_Cnt = 0;RX1_Buffer[RX1_Cnt] = SBUF;RX1_Cnt++;RX1_TimeOut = 5;}if(TI){TI = 0;B_TX1_Busy = 0;}
}/*
STC15F/L2KxxS2 扇区分配,512字节/扇区,从0x0000开始。型号 大小 扇区数 开始地址 结束地址 MOVC读偏移地址
STC15F/L2K08S2 53K 106扇区 0x0000 ~ 0xD3FF 0x2000
STC15F/L2K16S2 45K 90扇区 0x0000 ~ 0xB3FF 0x4000
STC15F/L2K24S2 37K 74扇区 0x0000 ~ 0x93FF 0x6000
STC15F/L2K32S2 29K 58扇区 0x0000 ~ 0x73FF 0x8000
STC15F/L2K40S2 21K 42扇区 0x0000 ~ 0x53FF 0xA000
STC15F/L2K48S2 13K 26扇区 0x0000 ~ 0x33FF 0xC000
STC15F/L2K56S2 5K 10扇区 0x0000 ~ 0x13FF 0xE000
STC15F/L2K60S2 1K 2扇区 0x0000 ~ 0x03FF 0xF000STC15F/L2K61S2 无EPROM, 整个122扇区的FLASH都可以擦写 地址 0x0000~0xF3ff.
*/#define ISP_ENABLE() ISP_CONTR = (ISP_EN + ISP_WAIT_FREQUENCY)
#define ISP_DISABLE() ISP_CONTR = 0; ISP_CMD = 0; ISP_TRIG = 0; ISP_ADDRH = 0xff; ISP_ADDRL = 0xff//========================================================================
// 函数: void DisableEEPROM(void)
// 描述: 禁止EEPROM.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2014-6-30
//========================================================================
void DisableEEPROM(void) //禁止访问EEPROM
{ISP_CONTR = 0; //禁止ISP/IAP操作ISP_CMD = 0; //去除ISP/IAP命令ISP_TRIG = 0; //防止ISP/IAP命令误触发ISP_ADDRH = 0xff; //指向非EEPROM区,防止误操作ISP_ADDRL = 0xff; //指向非EEPROM区,防止误操作
}//========================================================================
// 函数: void EEPROM_Trig(void)
// 描述: 触发EEPROM操作.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2014-6-30
//========================================================================
void EEPROM_Trig(void)
{F0 = EA; //保存全局中断EA = 0; //禁止中断, 避免触发命令无效ISP_TRIG(); //先送5AH,再送A5H到ISP/IAP触发寄存器,每次都需要如此//送完A5H后,ISP/IAP命令立即被触发启动//CPU等待IAP完成后,才会继续执行程序。_nop_();_nop_();EA = F0; //恢复全局中断
}//========================================================================
// 函数: void EEPROM_SectorErase(u16 EE_address)
// 描述: 擦除一个扇区.
// 参数: EE_address: 要擦除的EEPROM的扇区中的一个字节地址.
// 返回: none.
// 版本: V1.0, 2014-6-30
//========================================================================
void EEPROM_SectorErase(u16 EE_address)
{ISP_ENABLE(); //设置等待时间,允许ISP/IAP操作,送一次就够IAP_CONTR = 0X83;ISP_ERASE(); //宏调用, 送扇区擦除命令,命令不需改变时,不需重新送命令//只有扇区擦除,没有字节擦除,512字节/扇区。//扇区中任意一个字节地址都是扇区地址。ISP_ADDRH = EE_address / 256; //送扇区地址高字节(地址需要改变时才需重新送地址)ISP_ADDRL = EE_address % 256; //送扇区地址低字节EEPROM_Trig(); //触发EEPROM操作DisableEEPROM(); //禁止EEPROM操作
}//========================================================================
// 函数: void EEPROM_read_n(u16 EE_address,u8 *DataAddress,u8 lenth)
// 描述: 读N个字节函数.
// 参数: EE_address: 要读出的EEPROM的首地址.
// DataAddress: 要读出数据的指针.
// length: 要读出的长度
// 返回: 0: 写入正确. 1: 写入长度为0错误. 2: 写入数据错误.
// 版本: V1.0, 2014-6-30
//========================================================================
void EEPROM_read_n(u16 EE_address,u8 *DataAddress,u8 length)
{ISP_ENABLE(); //设置等待时间,允许ISP/IAP操作,送一次就够IAP_CONTR = 0X83;ISP_READ(); //送字节读命令,命令不需改变时,不需重新送命令do{ISP_ADDRH = EE_address / 256; //送地址高字节(地址需要改变时才需重新送地址)ISP_ADDRL = EE_address % 256; //送地址低字节EEPROM_Trig(); //触发EEPROM操作*DataAddress = ISP_DATA; //读出的数据送往EE_address++;DataAddress++;}while(--length);DisableEEPROM();
}//========================================================================
// 函数: u8 EEPROM_write_n(u16 EE_address,u8 *DataAddress,u8 length)
// 描述: 写N个字节函数.
// 参数: EE_address: 要写入的EEPROM的首地址.
// DataAddress: 要写入数据的指针.
// length: 要写入的长度
// 返回: 0: 写入正确. 1: 写入长度为0错误. 2: 写入数据错误.
// 版本: V1.0, 2014-6-30
//========================================================================
u8 EEPROM_write_n(u16 EE_address,u8 *DataAddress,u8 length)
{u8 i;u16 j;u8 *p;if(length == 0) return 1; //长度为0错误ISP_ENABLE(); //设置等待时间,允许ISP/IAP操作,送一次就够i = length;j = EE_address;p = DataAddress;ISP_WRITE(); //宏调用, 送字节写命令do{ISP_ADDRH = EE_address / 256; //送地址高字节(地址需要改变时才需重新送地址)ISP_ADDRL = EE_address % 256; //送地址低字节ISP_DATA = *DataAddress; //送数据到ISP_DATA,只有数据改变时才需重新送EEPROM_Trig(); //触发EEPROM操作EE_address++; //下一个地址DataAddress++; //下一个数据}while(--length); //直到结束EE_address = j;length = i;DataAddress = p;i = 0;ISP_READ(); //读N个字节并比较do{ISP_ADDRH = EE_address / 256; //送地址高字节(地址需要改变时才需重新送地址)ISP_ADDRL = EE_address % 256; //送地址低字节EEPROM_Trig(); //触发EEPROM操作if(*DataAddress != ISP_DATA) //读出的数据与源数据比较{i = 2;break;}EE_address++;DataAddress++;}while(--length);DisableEEPROM();return i;
}🛠串口写入和读取操作
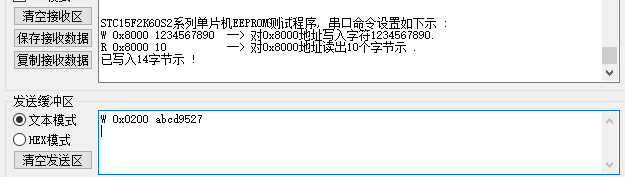
- 🌿写入操作:
W 0x0200 abcd9527
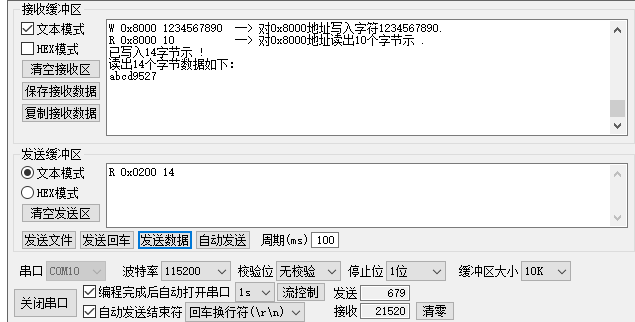
- 🌿读取操作:
R 0x0200 14
- 🍁在第一个扇区写入数据:
W 0x0000 去年今日此门中,人面桃花相映红。人面不知何处去,桃花依旧笑春风。
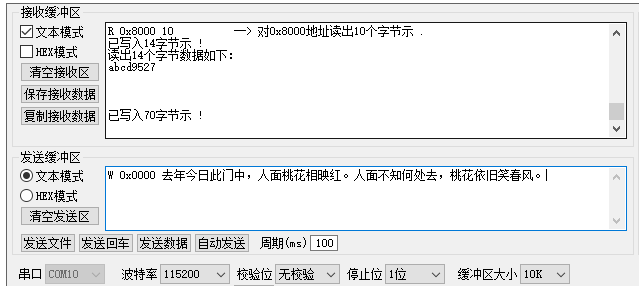
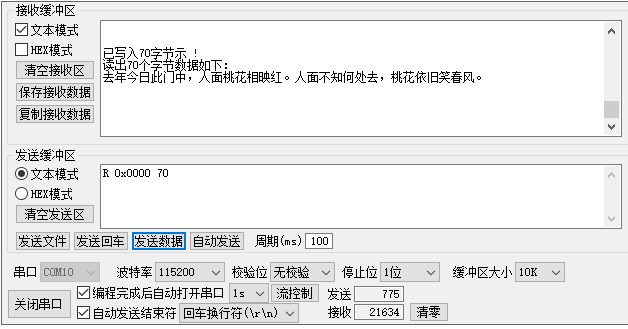
- 🍁读取第一个扇区数据:
R 0x0000 70
📚程序源码
- 🔖本案例来源于STC实验箱4中的案例修改而来。
复制这段内容后打开百度网盘手机App,操作更方便哦
链接: https://pan.baidu.com/s/1Q5k8FONsXFhnaDBcE3jiOw
提取码: dhye
相关文章:
STC15系列单片机通过串口多字节数据读写EEPROM操作
STC15系列单片机通过串口多字节数据读写EEPROM操作📌相关篇《STC15系列单片机EEPROM读写示例》 ⛳手册勘误信息注意事项 ⚡在手册上面描述STC15F2K60S2及STC15L2K60S2系列单片机内部EEPROM还可以用MOVC指令读,但此时首地址不再是0000H,而是程…...

计算机网络-ip数据报
在图中,网络层包含了四种协议:ARP、IP、ICMP、IGMP,由上下关系表明,ARP为IP协议服务,IP为ICMP和IGMP服务。 IP数据报格式 此处不区分数据报和分组的概念:当数据部分过长时,将数据部分拆分&…...

从零开始学C
以下是 该如何学习C语言的【思维导图】以及部分重点知识点的【博客链接】。其实C语言并不难,难的是没有人去教,没有耐心去学。不知道从哪下手学习,我将C的知识点做成一个思维导图,以供迷茫的小白参考,哪里不会…...
【云原生】手把手带你从零开始搭建kubernetes最新版本实战
文章目录前言一. 实验环境二. k8s 的介绍三 . k8s的安装3.1 搭建实验环境3.1.1 硬件层面的要求3.1.2 软件层面环境配置3.2 docker的安装3.2.1 搭建docker3.2.2 部署 cri-dockerd3.3 部署k8s3.3.1 配置添加阿里云的yum源3.3.2 安装kubeadm kubelet kubectl3.3.3 k8s-master节点初…...

trivy os软件包扫描原理分析
具体可以基于之前的博客来做 基于trivy获取基础镜像 参数修改一下: cliOpt.ListAllPkgs true 结果中会带有如下格式的结果: "Results":[{"Target":"192.168.1.94:443/test22/centos:7 (centos 7.9.2009)","Clas…...

算法训练营 day48 动态规划 完全背包 零钱兑换 II 组合总和 Ⅳ
算法训练营 day48 动态规划 完全背包 零钱兑换 II 组合总和 Ⅳ 完全背包 有N件物品和一个最多能背重量为W的背包。第i件物品的重量是weight[i],得到的价值是value[i] 。每件物品都有无限个(也就是可以放入背包多次),求解将哪些物…...
—泛型简单使用)
Java 基础(1)—泛型简单使用
一、泛型定义及作用 泛型是一种编程机制,允许在编写代码时使用参数化类型,以在编译时实现类型安全。 以下是泛型作用: 增强代码可读性和可维护性:通过在代码中使用泛型参数,可以使代码更清晰、更具有可读性和可维护性…...

内存卡损坏了怎么恢复?
内存卡损坏了怎么恢复?现在我们身边有不少电子设备都是用存储卡来存储数据的。一旦需要方便我们直接导出使用。但这存储的数据也不是一定安全的,当我们将内存卡连接到电脑时,难免会碰到病毒、格式化等提示,在这些情况下,可能会导…...
Mysql使用规范(纯技术和实战建议)
1、事务隔级别: (强制):Repeatable-Read(重复读),且不能在会话操作时临时开启隔离级别。 注: Repeatable-Read(重复读)隔离级别解决不了幻读。 可用 show variables l…...
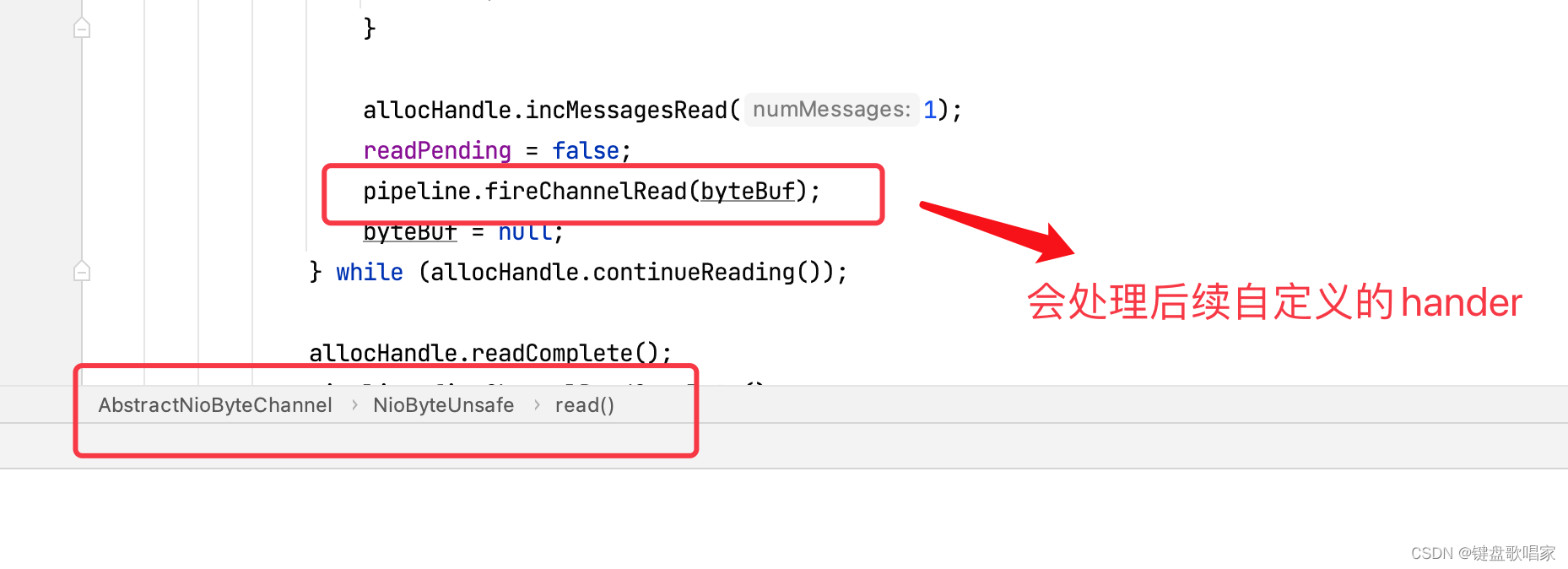
Netty源码解读-EventLoop(二)
一、简介 NioEventLoop的重要组成:Selector、线程、任务队列,他既会处理io事件,也会处理普通任务和定时任务. 1.下面是Selector,注意有两个哦后面会讲 2.下面的爷爷类提供的Thread变量,其实下面发excutor用的就是这个…...

OSI模型详解
今天,我们详解OSI(Open System Inter-connection Reference Model)模型,来看看工业物联网的网络互联和数据互通。 OSI模型 1984年,国际标准化组织(International Organization for Standardization&#…...
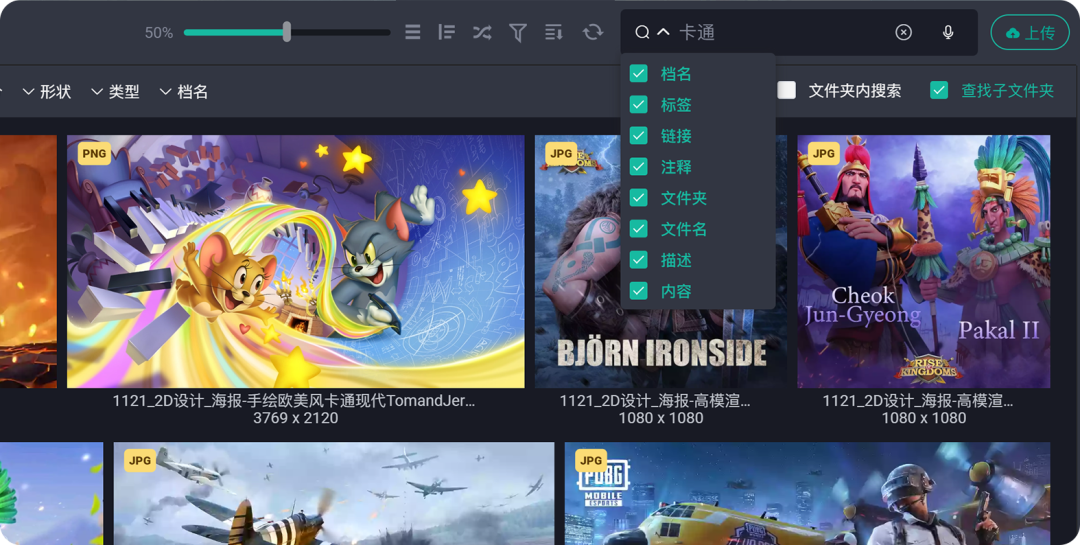
Share Creators完成500万美元融资,以工具化手段帮助企业从数字资产管理中解放
近日,总部位于旧金山湾区的初创公司Share Creators宣布完成了新一轮500万美元的融资,投资方为五源资本和福昕PDF。本轮融资主要用于扩大客户基础,并加速在美国、欧洲和亚洲的业务发展。近几年,企业内容及数字资产管理全球市场正在…...

几个Base64编码工具,也有蹊跷
起因 需求:对一段内容进行base64加密,然后通过url的get请求进行发送到后台,由于加密的内容比较少,base64串也不是很长,我认为此方案可行。 于是找了三个base64编码的在线工具,分别是: 平台1&…...

Python|每日一练|排序|递归|字符串|数组|动态规划|单选记录:以特殊格式处理连续增加的数字|正则表达式匹配|地下城游戏
1、以特殊格式处理连续增加的数字(排序) 贡献者:EricLao 给出一串数字, 程序要把数字按照这样的格式输出,把连续增加的数字用 [x-y] 的形式表示,只显示这一组顺序数字的首位两个数字,不连续增…...

Spring Cloud微服务网关Gateway组件
目录 网关简介 什么是Spring Cloud Gateway Spring Cloud Gateway 功能特征 核心概念 工作原理 Spring Cloud Gateway快速开始 环境搭建 集成Nacos 路由断言工厂(Route Predicate Factories)配置 自定义路由断言工厂 过滤器工厂( …...
)
cluster nodes(集群节点)
CLUSTER NODES 复制 自3.0.0起可用。 时间复杂度: O(N)其中N是 Cluster 节点的总数 Redis 集群中的每个节点都有其当前集群配置的视图,由已知节点的集合给出,我们与这些节点的连接状态,它们的标志&…...
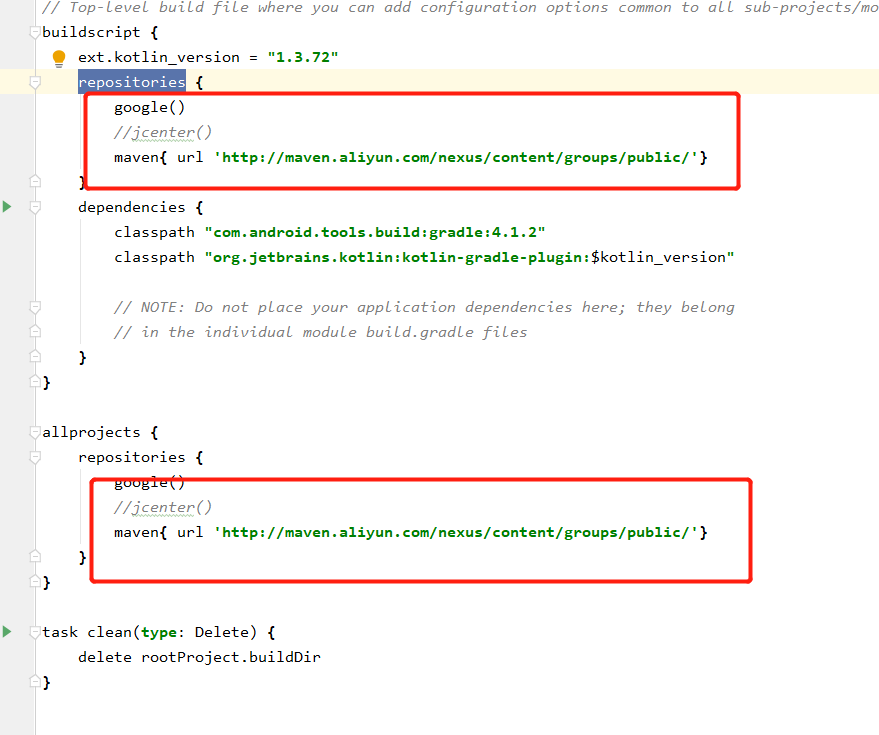
【Android学习】下载jar慢和gradle慢的情况
目录 问题出现的原因 解决方法 解决Gradle下载问题:手动安装 解决jar包下载慢问题:更改下载源 问题出现的原因 国内访问谷歌被墙导致访问速度慢或者干脆无法下载 解决方法 解决Gradle下载问题:手动安装 访问官网Gradle | Release Candi…...
下一个排列-力扣31-java
一、题目描述整数数组的一个 排列 就是将其所有成员以序列或线性顺序排列。例如,arr [1,2,3] ,以下这些都可以视作 arr 的排列:[1,2,3]、[1,3,2]、[3,1,2]、[2,3,1] 。整数数组的 下一个排列 是指其整数的下一个字典序更大的排列。更正式地&…...

前端面试题
1.HTTP request报文结构是怎样的 1.首行是Request-Line包括:请求方法,请求URI,协议版本,CRLF(换行符) 2.首行之后是若干行请求头,包括general-header,request-header或者entity-hea…...

jsp游戏门户网站系统Myeclipse开发mysql数据库web结构java编程计算机网页项目
一、源码特点 jsp 游戏门户网站系统 是一套完善的web设计系统,对理解JSP java编程开发语言有帮助,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。开发环境为 TOMCAT7.0,Myeclipse8.5开发,数据库为Mysql,使…...
:手搓截屏和帧率控制)
Python|GIF 解析与构建(5):手搓截屏和帧率控制
目录 Python|GIF 解析与构建(5):手搓截屏和帧率控制 一、引言 二、技术实现:手搓截屏模块 2.1 核心原理 2.2 代码解析:ScreenshotData类 2.2.1 截图函数:capture_screen 三、技术实现&…...

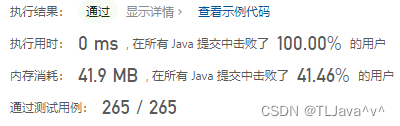
Leetcode 3576. Transform Array to All Equal Elements
Leetcode 3576. Transform Array to All Equal Elements 1. 解题思路2. 代码实现 题目链接:3576. Transform Array to All Equal Elements 1. 解题思路 这一题思路上就是分别考察一下是否能将其转化为全1或者全-1数组即可。 至于每一种情况是否可以达到…...
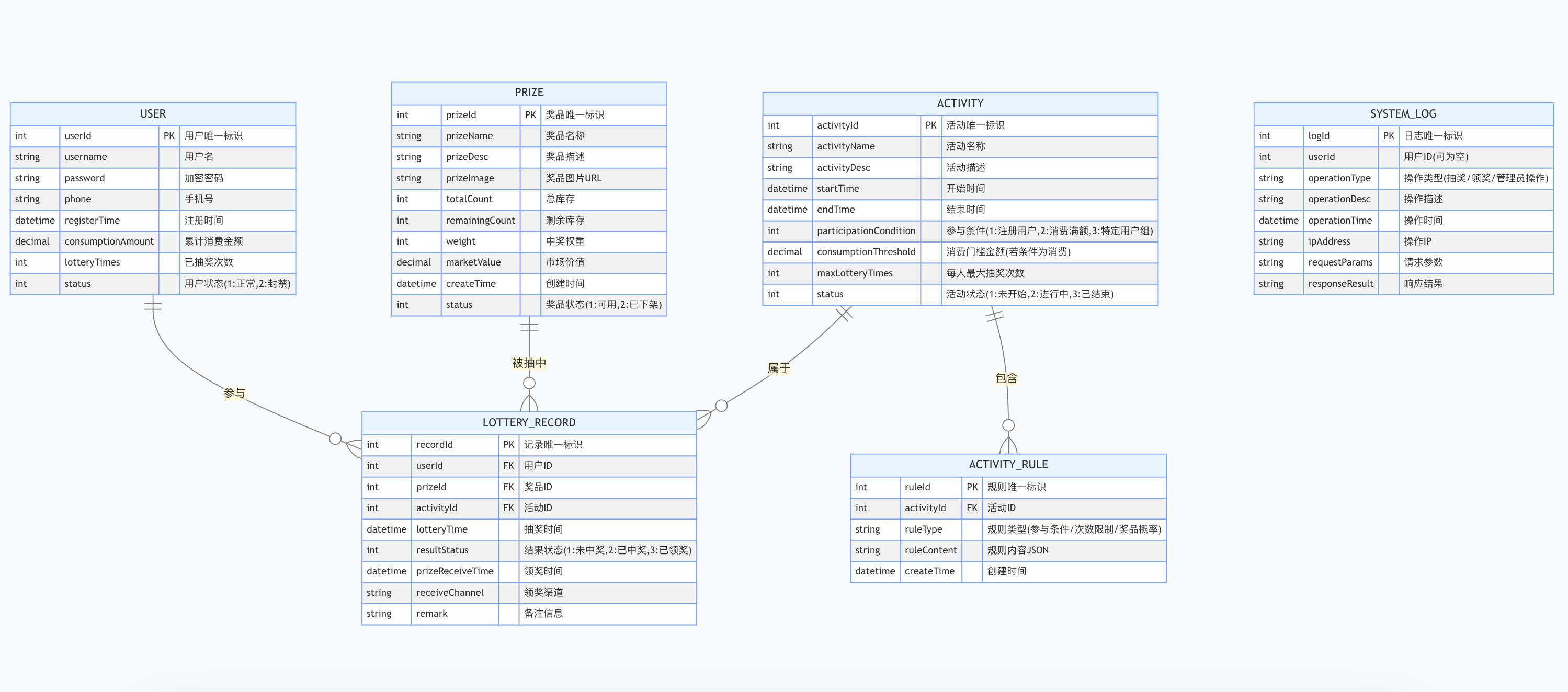
简易版抽奖活动的设计技术方案
1.前言 本技术方案旨在设计一套完整且可靠的抽奖活动逻辑,确保抽奖活动能够公平、公正、公开地进行,同时满足高并发访问、数据安全存储与高效处理等需求,为用户提供流畅的抽奖体验,助力业务顺利开展。本方案将涵盖抽奖活动的整体架构设计、核心流程逻辑、关键功能实现以及…...
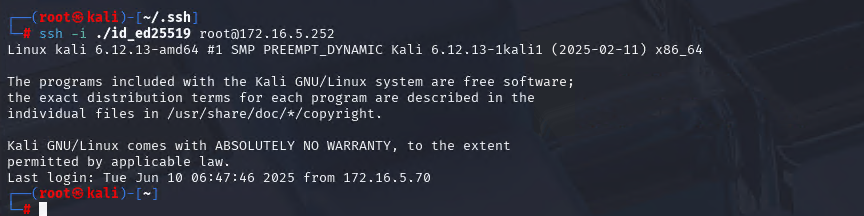
Xshell远程连接Kali(默认 | 私钥)Note版
前言:xshell远程连接,私钥连接和常规默认连接 任务一 开启ssh服务 service ssh status //查看ssh服务状态 service ssh start //开启ssh服务 update-rc.d ssh enable //开启自启动ssh服务 任务二 修改配置文件 vi /etc/ssh/ssh_config //第一…...
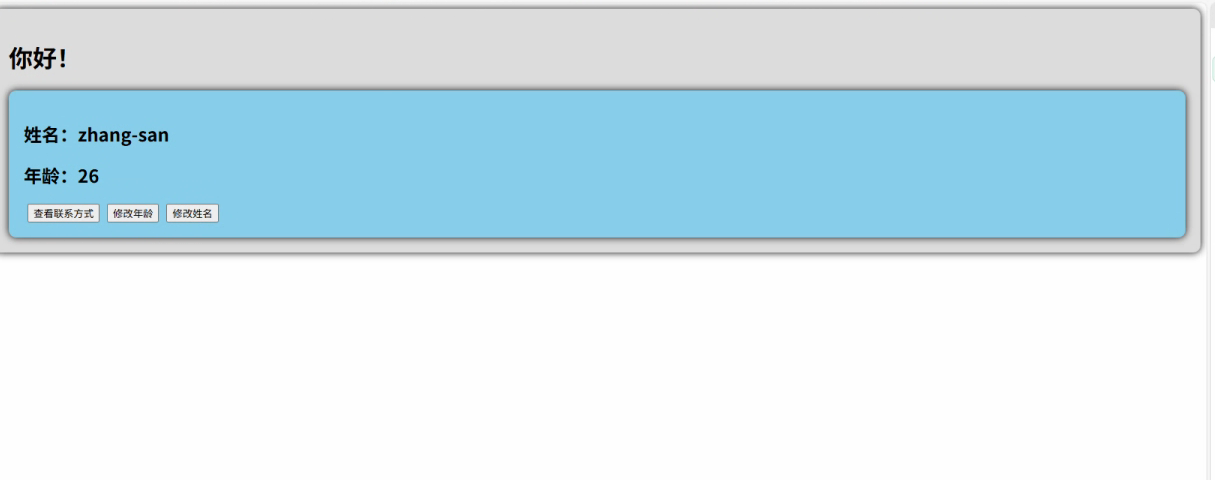
2.Vue编写一个app
1.src中重要的组成 1.1main.ts // 引入createApp用于创建应用 import { createApp } from "vue"; // 引用App根组件 import App from ./App.vue;createApp(App).mount(#app)1.2 App.vue 其中要写三种标签 <template> <!--html--> </template>…...

【android bluetooth 框架分析 04】【bt-framework 层详解 1】【BluetoothProperties介绍】
1. BluetoothProperties介绍 libsysprop/srcs/android/sysprop/BluetoothProperties.sysprop BluetoothProperties.sysprop 是 Android AOSP 中的一种 系统属性定义文件(System Property Definition File),用于声明和管理 Bluetooth 模块相…...

Spring Cloud Gateway 中自定义验证码接口返回 404 的排查与解决
Spring Cloud Gateway 中自定义验证码接口返回 404 的排查与解决 问题背景 在一个基于 Spring Cloud Gateway WebFlux 构建的微服务项目中,新增了一个本地验证码接口 /code,使用函数式路由(RouterFunction)和 Hutool 的 Circle…...
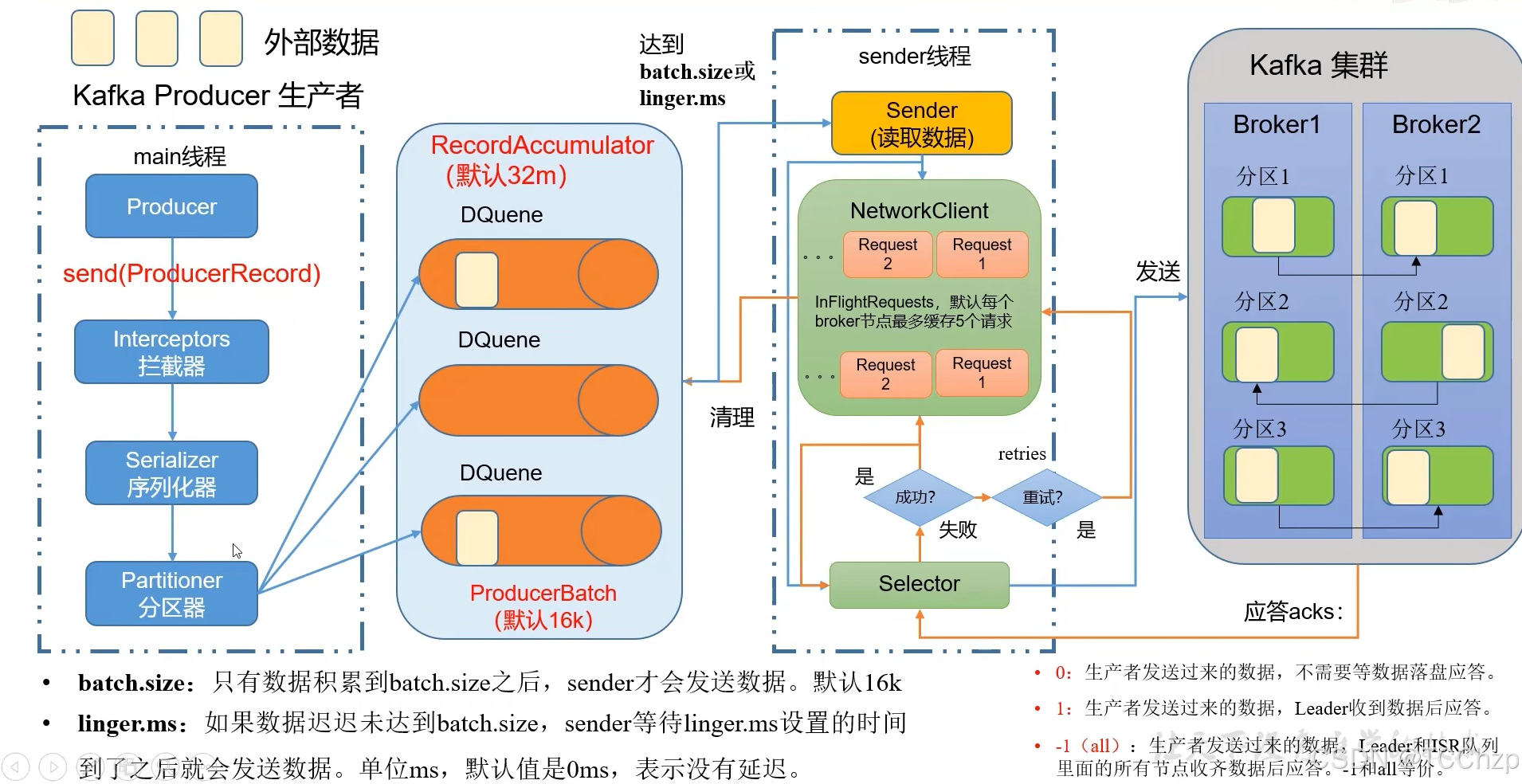
Kafka入门-生产者
生产者 生产者发送流程: 延迟时间为0ms时,也就意味着每当有数据就会直接发送 异步发送API 异步发送和同步发送的不同在于:异步发送不需要等待结果,同步发送必须等待结果才能进行下一步发送。 普通异步发送 首先导入所需的k…...
【C++特殊工具与技术】优化内存分配(一):C++中的内存分配
目录 一、C 内存的基本概念 1.1 内存的物理与逻辑结构 1.2 C 程序的内存区域划分 二、栈内存分配 2.1 栈内存的特点 2.2 栈内存分配示例 三、堆内存分配 3.1 new和delete操作符 4.2 内存泄漏与悬空指针问题 4.3 new和delete的重载 四、智能指针…...
MySQL的pymysql操作
本章是MySQL的最后一章,MySQL到此完结,下一站Hadoop!!! 这章很简单,完整代码在最后,详细讲解之前python课程里面也有,感兴趣的可以往前找一下 一、查询操作 我们需要打开pycharm …...