STM32HAL库RS485-ModBus协议控制伺服电机
STM32HAL库RS485-ModBus协议控制伺服电机
一个月前,接手了一个学长的毕设小车,小车采用rs485通信的modbus协议驱动轮毂电机,与往常我学习的pwm控制电机方法大相径庭,在这里以这篇博客记录下该学习过程。
小车主要架构
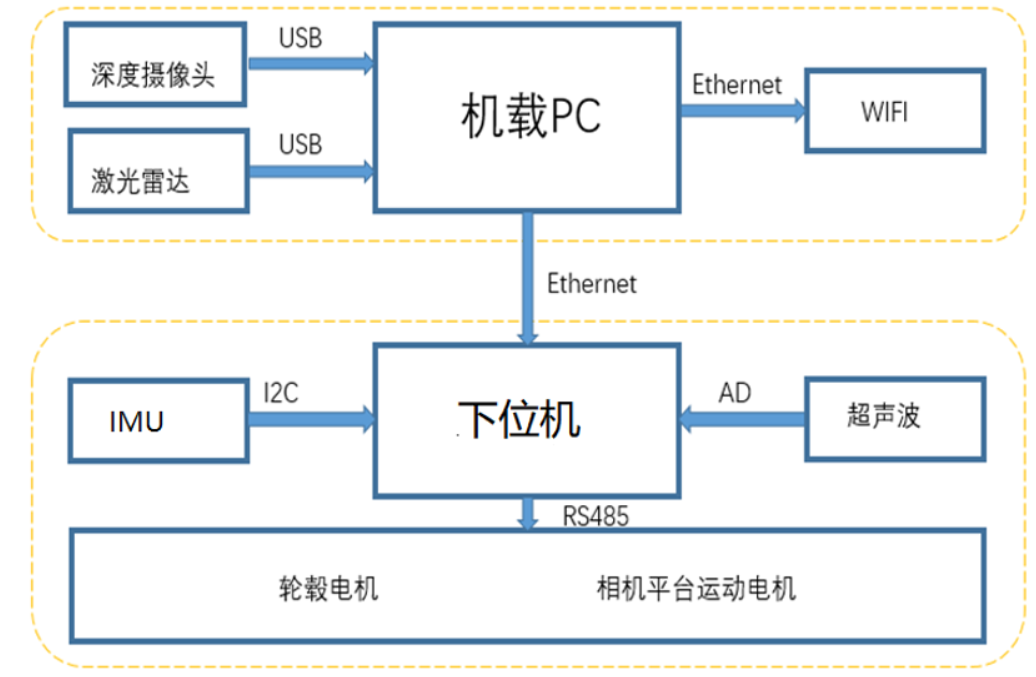
电机型号
中菱轮毂电机
轮毂驱动器ZLAC8015D
- ZLAC8015D 的 RS485 支持 Modbus RTU 协议。
- 驱动器地址为 0-127 可设,默认为 1;
- 波特率 9600、19200、38400、57600、115200、128000、256000 等 7 种, 可通过软件设置。
默认 115200; 数据位 8,无奇偶校验,停止位 1
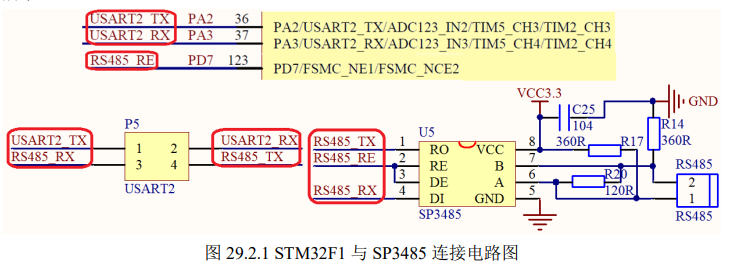
RS485通信
RS485接口组成的半双工网络,一般是两线制,多采用屏蔽双绞线传输,这种接线方式为总线式拓扑结构在同一总线上最多可以挂接32个结点。我们知道,最初数据是模拟信号输出简单过程量,后来仪表接口是RS232接口,这种接口可以实现点对点的通信方式,但这种方式不能实现联网功能,随后出现的RS485解决了这个问题。为此本文通过问答的形式详细介绍RS485接口。
RS485_RE为高电平的时候,DE为高电平有效,允许发送数据
RS485_RE为低电平的时候,RE为低电平有效,允许接收数据
485转换芯片可以把输入的串口信号转化成差分信号,也可以差分信号转化成串口信号
信号线A、B
| A>B | 0 |
|---|---|
| B>A | 1 |
STM32实现主从机RS485通信
STM32F103ZET6
RS485接口 A接A B接B
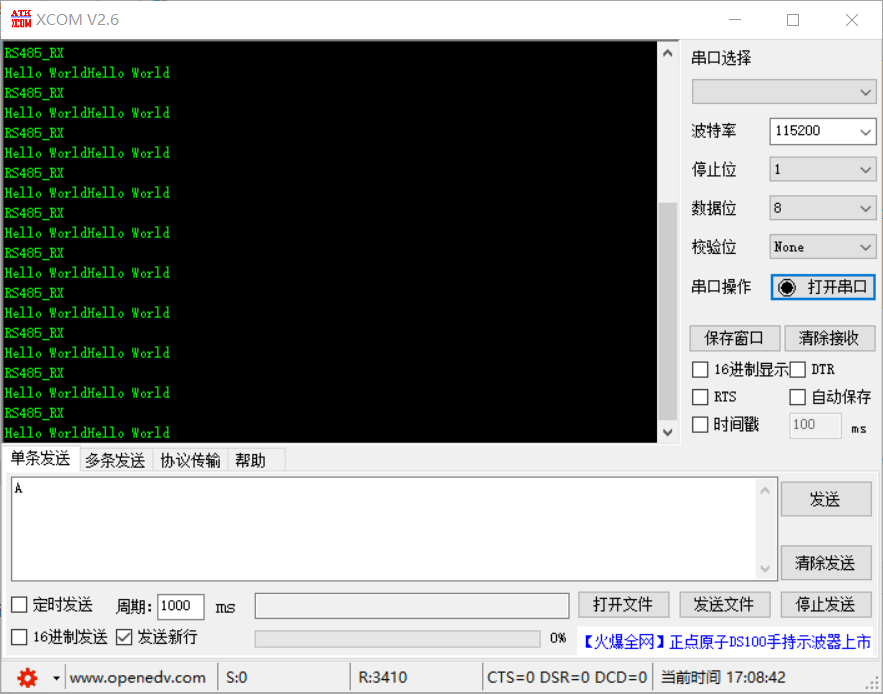
从机:
RS485发送 “Hello World”
char Buff[30];
//*******************
while (1){/* USER CODE END WHILE */HAL_GPIO_WritePin(GPIOD, GPIO_PIN_7, GPIO_PIN_SET); //拉高发送sprintf(Buff,"Hello World");HAL_UART_Transmit(&huart2, Buff, sizeof(Buff), 0xffff); HAL_Delay(500);/* USER CODE BEGIN 3 */}
主机:
RS485接收 “Hello World”
虚拟串口打印
HAL_UART_Receive_IT(&huart2, RxBuff,1);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_7, GPIO_PIN_RESET); //拉低接收
//*******************************
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{uint8_t i;if(huart->Instance==USART2){HAL_UART_Receive_IT(&huart2,RxBuff,10);CDC_Transmit_FS(RxBuff, sizeof(RxBuff));}
}
Modbus协议
Modbus就是一种用在工业上的简单协议!
大致分为以下几种:
- Modbus-RTU
- Modbus-ASCII
- Modbus-TCP
以上三种协议,一个设备只会有一种协议,该电机使用的是Modbus-RTU。
Modbus是主从方式通信,也就是说,不能同步进行通信,总线上每次只有一个数据进行传输,即主机发送,从机应答,主机不发送,总线上就没有数据通信。
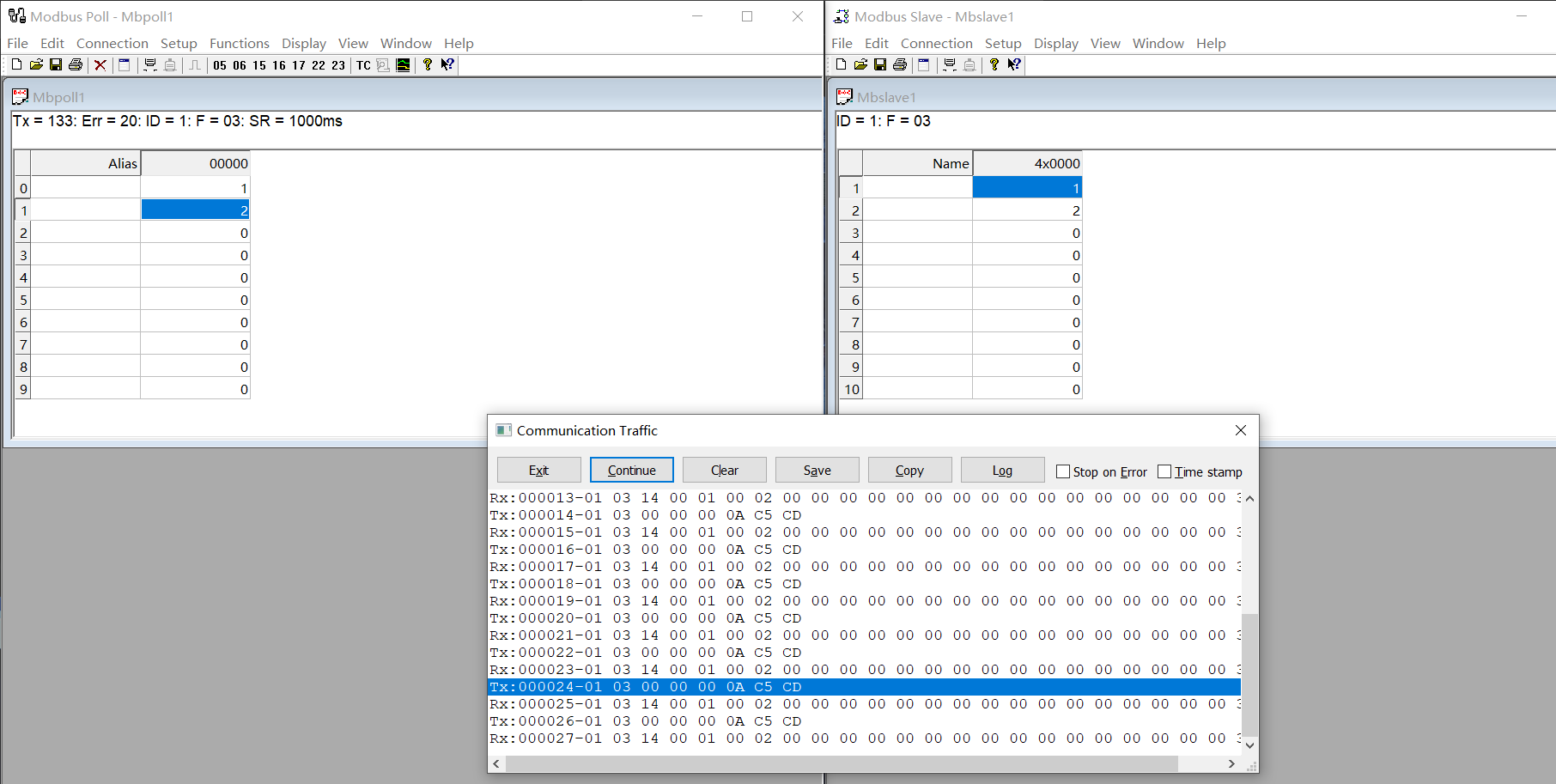
Modbus Poll主机Modbus Slave从机通信
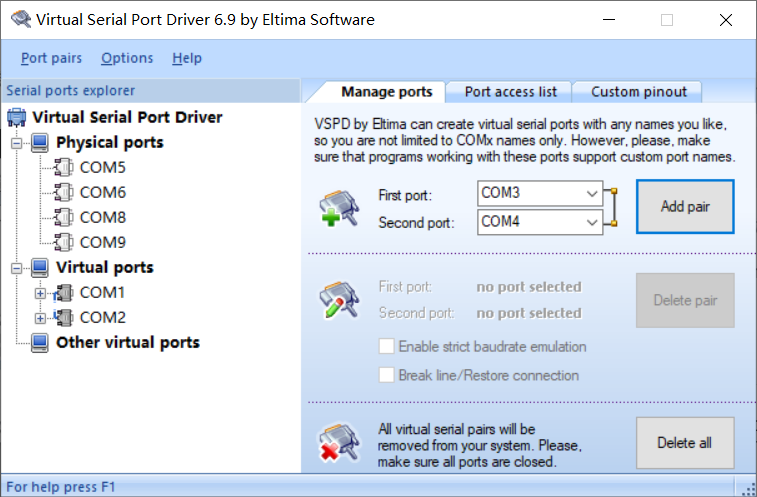
第三方测试软件:vspd、Modbus Poll、Modbus Slave
虚拟一个串口
修改配置
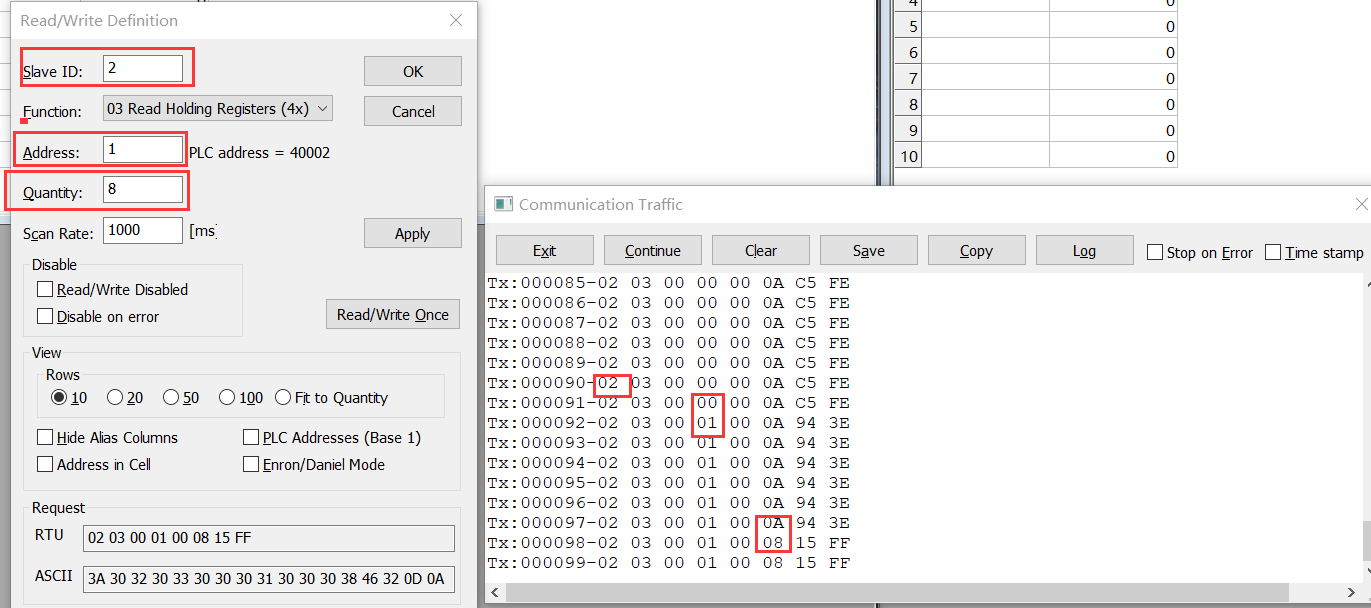
读取数据
发送
Tx:000024- 01 03 00 00 00 0A C5 CD
| 01 | 03 | 00 00 | 00 0A | C5 CD |
|---|---|---|---|---|
| ID号 | 功能码 | 起始地址 | 数据内容 | 校验码 |
接收
Rx:000143- 01 03 0A 00 01 00 02 00 01 00 00 00 00 37 26
| 01 | 03 | 0A | 00 01 00 02 00 01 00 00 00 00 | 37 26 |
|---|---|---|---|---|
| ID号 | 功能码 | 字节长度 | 数据内容 | 校验位 |
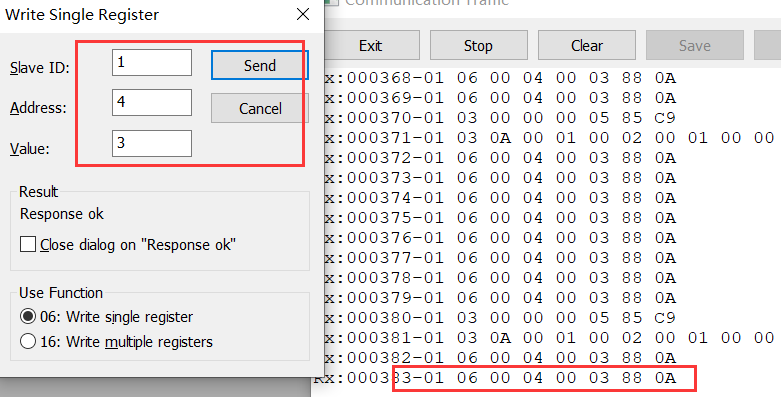
发送单条数据
| 01 | 06 | 00 04 | 00 03 | 88 0A |
|---|---|---|---|---|
| ID号 | 功能码 | 起始地址 | 数据内容 | 校验码 |
发送多条数据
主机TX:
| ID | 功能码 | 起始地址 | 寄存器长度 | 数据内容 | 校验码 |
|---|---|---|---|---|---|
| 01 | 16(0X10) | 00 00 | 00 05 | 10字节 | XX XX |
Tx:001200- 01 10 00 03 00 01 02 00 04 A7 A0
| ID | 功能码 | 起始地址 | 数据长度 | 字节长度 | 数据内容 | 校验码 |
|---|---|---|---|---|---|---|
| 01 | 10 | 00 03 | 00 01 | 02 | 00 04 | A7 A0 |
功能码:
- 03->读取数据
- 06->发送单条数据
- 10->发送多条数据
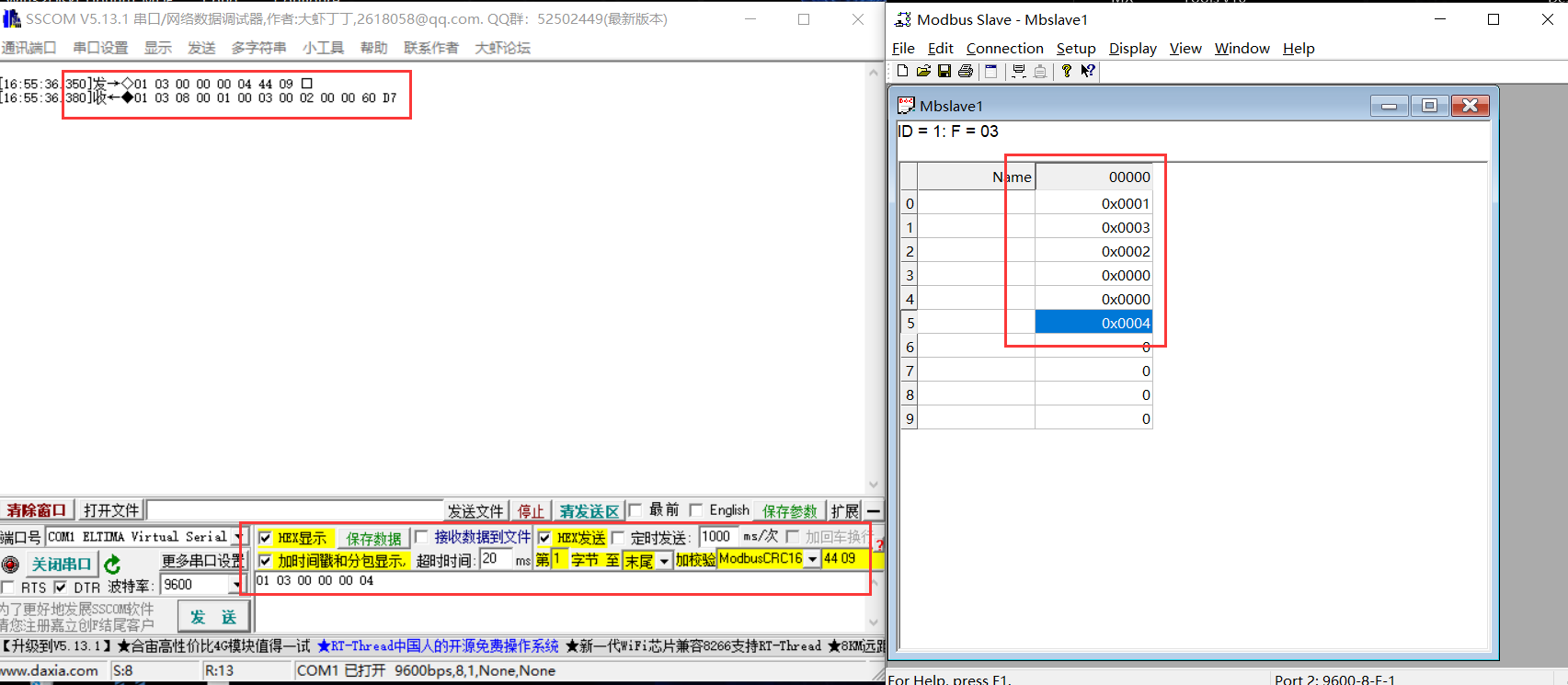
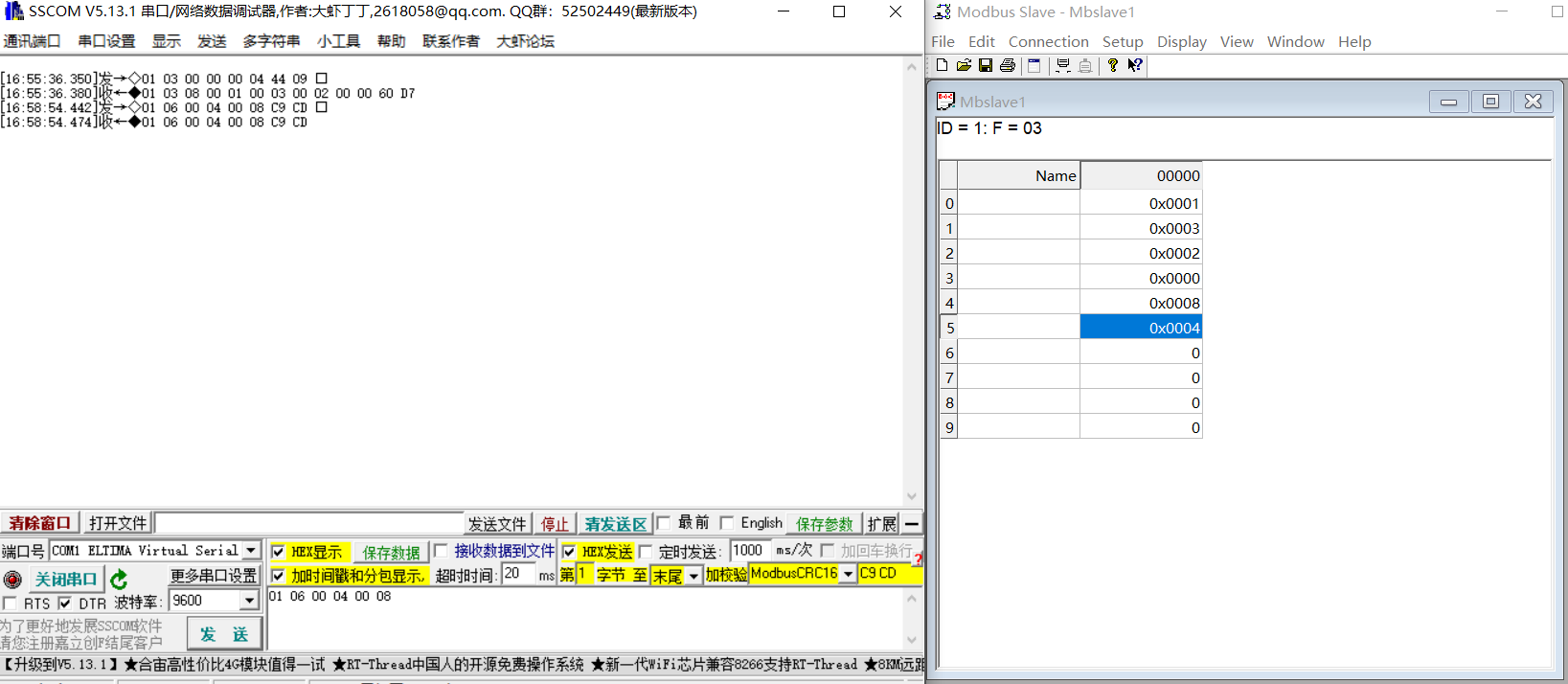
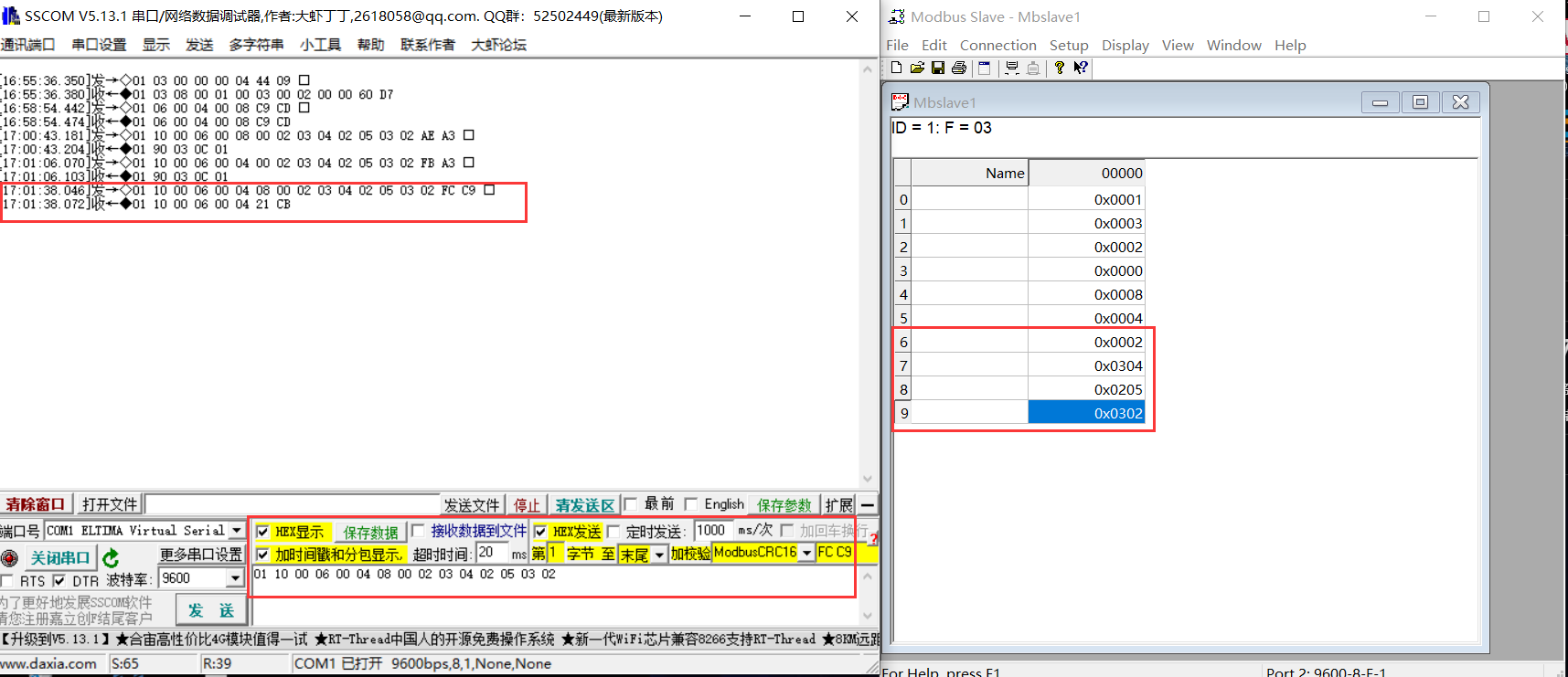
SSCOM主机Modbus Slave从机通信
读取数据
发送单条数据
发送多条数据
STM32通过RS485完成Modbus协议通信
移植Modbus协议
mbrtu_master.h
#ifndef MBRTU_MASTER_H_
#define MBRTU_MASTER_H_#include <stdint.h>
#include <stdlib.h>
#include <stdio.h>
#include "mbrtu_master.h"
#include "usart.h"
#include "tim.h"/
///
/// MODBUS RTU 主机控制结构
///
///
typedef struct
{//// 收发数据缓存//uint8_t ucBuf[128];//// 收发数据状态//uint16_t usStatus;//// 如果使用了RTOS需要进行互斥,那么需要实现以下两个函数的绑定//void (*lock)(void);void (*unlock)(void);//// 微秒延时函数,用于等待超时//void (*delayms)(uint32_t nms);//// 定时器启动和停止函数//void (*timerStop)(void);void (*timerStart)(void);//// 发送数据函数,可以是串口、TCP等//uint32_t (*sendData)(const void* buf, uint32_t len);//// 以下四个回调函数分别是:读线圈、读离散量输入、读保持寄存器、读输入寄存器//void (*readCoilsCallback)(uint16_t usStartAddr, uint16_t usNum, const uint8_t* pucBitsOfCoilsState, uint16_t usLen);void (*readDiscreteInputsCallback)(uint16_t usStartAddr, uint16_t usNum, const uint8_t* pucBitsOfDiscreteInputsState, uint16_t usLen);void (*readHoldingRegistersCallback)(uint16_t usStartAddr, uint16_t usNum, const uint16_t* pusHoldingRegistersVal, uint16_t usLen);void (*readInputRegistersCallback)(uint16_t usStartAddr, uint16_t usNum, const uint16_t* pusInputRegistersVal, uint16_t usLen);}MBRTUMaterTypeDef;/
static void timerStop(void);
static void timerStart(void);
static void delayms(uint32_t nms);
static uint32_t sendData(const void *buf, uint32_t len);
static void readCoilsCallback(uint16_t usStartAddr, uint16_t usNum, const uint8_t *pucBitsOfCoilsState, uint16_t usLen);
static void readDiscreteInputsCallback(uint16_t usStartAddr, uint16_t usNum, const uint8_t *pucBitsOfDiscreteInputsState, uint16_t usLen);
static void readHoldingRegistersCallback(uint16_t usStartAddr, uint16_t usNum, const uint16_t *pusHoldingRegistersVal, uint16_t usLen);
static void readInputRegistersCallback(uint16_t usStartAddr, uint16_t usNum, const uint16_t *pusInputRegistersVal, uint16_t usLen);/
///
/// MODBUS RTU 主机 API
///
///
int MBRTUMasterReadCoils(MBRTUMaterTypeDef* psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, uint16_t usTimeout);
int MBRTUMasterReadDiscreteInputs(MBRTUMaterTypeDef* psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, uint16_t usTimeout);
int MBRTUMasterReadHoldingRegisters(MBRTUMaterTypeDef* psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, uint16_t usTimeout);
int MBRTUMasterReadInputRegisters(MBRTUMaterTypeDef* psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, uint16_t usTimeout);
int MBRTUMasterWriteSingleCoil(MBRTUMaterTypeDef* psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint8_t ucState, uint16_t usTimeout);
int MBRTUMasterWriteSingleRegister(MBRTUMaterTypeDef* psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usRegVal, uint16_t usTimeout);
int MBRTUMasterWriteMultipleCoils(MBRTUMaterTypeDef* psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, const uint8_t* pucStateBitsBuf, uint16_t usTimeout);
int MBRTUMasterWriteMultipleRegisters(MBRTUMaterTypeDef* psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, const uint16_t* pusRegVal, uint16_t usTimeout);/
///
/// MODBUS RTU 主机接收数据回调函数和超时回调函数
///
/// MBRTUMasterRecvByteISRCallback:放置于串口接收中断中
/// MBRTUMasterTimerISRCallback:放置于定时器超时中断中
///
void MBRTUMasterRecvByteISRCallback(MBRTUMaterTypeDef* psModbus, uint8_t ucByte);
void MBRTUMasterTimerISRCallback(MBRTUMaterTypeDef* psModbus);#endif /* MBRTU_MASTER_H_ */mbrtu_master.c
/** mbrtu_master.c** Created on: 2022年4月29日* Author: hello*/#include "mbrtu_master.h"static uint16_t usMBCRC16(uint8_t *pucFrame, uint16_t usLen)
{static const uint8_t aucCRCHi[] ={0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40};static const uint8_t aucCRCLo[] ={0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7,0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E,0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09, 0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9,0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC,0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32,0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C, 0xFC, 0xFD, 0x3D,0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A, 0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38,0x28, 0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF,0x2D, 0xED, 0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60, 0x61, 0xA1,0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4,0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F, 0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB,0x69, 0xA9, 0xA8, 0x68, 0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA,0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0,0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97,0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C, 0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E,0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89,0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83,0x41, 0x81, 0x80, 0x40};uint8_t ucCRCHi = 0xFF;uint8_t ucCRCLo = 0xFF;int iIndex;while (usLen--){iIndex = ucCRCLo ^ *(pucFrame++);ucCRCLo = (uint8_t)(ucCRCHi ^ aucCRCHi[iIndex]);ucCRCHi = aucCRCLo[iIndex];}return (uint16_t)(ucCRCHi << 8 | ucCRCLo);
}//读取数据
static uint32_t MBRTUMasterRead(MBRTUMaterTypeDef *pMaster, uint8_t ucSlaveAddr, uint8_t ucCmd, uint16_t usStartAddr, uint16_t usNum)
{uint16_t crc;pMaster->ucBuf[0] = ucSlaveAddr;pMaster->ucBuf[1] = ucCmd;pMaster->ucBuf[2] = ((usStartAddr & 0XFF00) >> 8);pMaster->ucBuf[3] = (usStartAddr & 0XFF);pMaster->ucBuf[4] = ((usNum & 0XFF00) >> 8);pMaster->ucBuf[5] = (usNum & 0XFF);crc = usMBCRC16((uint8_t *)pMaster->ucBuf, 6);pMaster->ucBuf[6] = (uint8_t)(crc & 0xFF);pMaster->ucBuf[7] = (uint8_t)(crc >> 8);return pMaster->sendData(pMaster->ucBuf, 8);
}/*** 主机读取线圈状态* @param ucSlaveAddress 从机地址* @param usAddress 要读取的线圈起始地址* @param usCmd 0x01* @param usNum 要读取的线圈数量* @param usTimeout 超时时间,单位毫秒* @return 0:成功 <0:执行失败*/
int MBRTUMasterReadCoils(MBRTUMaterTypeDef *psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, uint16_t usTimeout)
{int ret = -1;int delay;if (psModbus->lock != NULL){psModbus->lock();}psModbus->usStatus = 0;MBRTUMasterRead(psModbus, ucSlaveAddress, 0X01, usAddress, usNum);while (usTimeout != 0){if (psModbus->usStatus & 0X8000){if (psModbus->ucBuf[0] == ucSlaveAddress && psModbus->ucBuf[1] == 0X01){psModbus->readCoilsCallback(usAddress, usNum, &psModbus->ucBuf[3], psModbus->ucBuf[2]);ret = 0;}else{ret = -2;}psModbus->usStatus = 0;break;}delay = usTimeout > 5 ? 5 : usTimeout;usTimeout -= delay;psModbus->delayms(delay);}if (psModbus->unlock != NULL){psModbus->unlock();}return ret;
}/*** 主机读取离散量输入* @param ucSlaveAddress 从机地址* @param usAddress 要读取的离散量起始地址* @param usCmd 0x02* @param usNum 要读取的离散量数量* @param usTimeout 超时时间,单位毫秒* @return 0:成功 <0:执行失败*/
int MBRTUMasterReadDiscreteInputs(MBRTUMaterTypeDef *psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, uint16_t usTimeout)
{int ret = -1;int delay;if (psModbus->lock != NULL){psModbus->lock();}psModbus->usStatus = 0;MBRTUMasterRead(psModbus, ucSlaveAddress, 0X02, usAddress, usNum);while (usTimeout != 0){if (psModbus->usStatus & 0X8000){if (psModbus->ucBuf[0] == ucSlaveAddress && psModbus->ucBuf[1] == 0X02){psModbus->readDiscreteInputsCallback(usAddress, usNum, &psModbus->ucBuf[3], psModbus->ucBuf[2]);ret = 0;}else{ret = -2;}psModbus->usStatus = 0;break;}delay = usTimeout > 5 ? 5 : usTimeout;usTimeout -= delay;psModbus->delayms(delay);}if (psModbus->unlock != NULL){psModbus->unlock();}return ret;
}/*** 主机读取保持寄存器!!!!!!!!!!!!* @param ucSlaveAddress 从机地址* @param usAddress 要读取的保持寄存器起始地址* @param usCmd 0x03* @param usNum 要读取的保持寄存器数量* @param usTimeout 超时时间,单位毫秒* @return 0:成功 <0:执行失败*/
int MBRTUMasterReadHoldingRegisters(MBRTUMaterTypeDef *psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, uint16_t usTimeout)
{int ret = -1;int delay;if (psModbus->lock != NULL){psModbus->lock();}psModbus->usStatus = 0;MBRTUMasterRead(psModbus, ucSlaveAddress, 0X03, usAddress, usNum);while (usTimeout != 0){if (psModbus->usStatus & 0X8000){if (psModbus->ucBuf[0] == ucSlaveAddress && psModbus->ucBuf[1] == 0X03){psModbus->readHoldingRegistersCallback(usAddress, usNum, (const uint16_t *)&psModbus->ucBuf[3], psModbus->ucBuf[2] >> 1);ret = 0;}else{ret = -2;}psModbus->usStatus = 0;break;}delay = usTimeout > 5 ? 5 : usTimeout;usTimeout -= delay;psModbus->delayms(delay);}if (psModbus->unlock != NULL){psModbus->unlock();}return ret;
}/*** 主机读取输入寄存器* @param ucSlaveAddress 从机地址* @param usAddress 要读取的输入寄存器起始地址* @param usCmd 0x04* @param usNum 要读取的输入寄存器数量* @param usTimeout 超时时间,单位毫秒* @return 0:成功 <0:执行失败*/
int MBRTUMasterReadInputRegisters(MBRTUMaterTypeDef *psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, uint16_t usTimeout)
{int ret = -1;int delay;if (psModbus->lock != NULL){psModbus->lock();}psModbus->usStatus = 0;MBRTUMasterRead(psModbus, ucSlaveAddress, 0X04, usAddress, usNum);while (usTimeout != 0){if (psModbus->usStatus & 0X8000){if (psModbus->ucBuf[0] == ucSlaveAddress && psModbus->ucBuf[1] == 0X04){psModbus->readInputRegistersCallback(usAddress, usNum, (const uint16_t *)&psModbus->ucBuf[3], psModbus->ucBuf[2] >> 1);ret = 0;}else{ret = -2;}psModbus->usStatus = 0;break;}delay = usTimeout > 5 ? 5 : usTimeout;usTimeout -= delay;psModbus->delayms(delay);}if (psModbus->unlock != NULL){psModbus->unlock();}return ret;
}/*** 主机写单个线圈* @param ucSlaveAddress 从机地址* @param usAddress 线圈地址* @param usCmd 0x05* @param ucState 要设置的线圈状态,1或者0* @param usTimeout 超时时间,单位毫秒* @return 0:成功 <0:执行失败*/int MBRTUMasterWriteSingleCoil(MBRTUMaterTypeDef *psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint8_t ucState, uint16_t usTimeout)
{int ret = -1;int delay;uint16_t crc;if (psModbus->lock != NULL){psModbus->lock();}psModbus->ucBuf[0] = ucSlaveAddress;psModbus->ucBuf[1] = 0X05;psModbus->ucBuf[2] = usAddress & 0XFF;psModbus->ucBuf[3] = usAddress >> 8;psModbus->ucBuf[4] = ucState ? 0XFF : 0X00;psModbus->ucBuf[5] = 0X00;crc = usMBCRC16((uint8_t *)psModbus->ucBuf, 6);psModbus->ucBuf[6] = (uint8_t)(crc & 0xFF);psModbus->ucBuf[7] = (uint8_t)(crc >> 8);psModbus->usStatus = 0;psModbus->sendData(psModbus->ucBuf, 8);while (usTimeout != 0){if (psModbus->usStatus & 0X8000){if (psModbus->ucBuf[0] == ucSlaveAddress && psModbus->ucBuf[1] == 0X05){ret = 0;}else{ret = -2;}psModbus->usStatus = 0;break;}delay = usTimeout > 5 ? 5 : usTimeout;usTimeout -= delay;psModbus->delayms(delay);}if (psModbus->unlock != NULL){psModbus->unlock();}return ret;
}/*** 主机写单个寄存器!!!!!!!!!!!* @param ucSlaveAddress 从机地址* @param usAddress 寄存器地址* @param usCmd 0x06* @param usRegVal 寄存器值* @param usTimeout 超时时间,单位毫秒* @return 0:成功 <0:执行失败*/
// MBRTUMasterWriteSingleRegister(&MBRTUHandle, 1, RUN_MODE_ADDR, 0x0003, 100);
int MBRTUMasterWriteSingleRegister(MBRTUMaterTypeDef *psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usRegVal, uint16_t usTimeout)
{int ret = -1;int delay;uint16_t crc;if (psModbus->lock != NULL){psModbus->lock();}psModbus->ucBuf[0] = ucSlaveAddress;psModbus->ucBuf[1] = 0X06;psModbus->ucBuf[2] = usAddress & 0XFF;psModbus->ucBuf[3] = usAddress >> 8;psModbus->ucBuf[4] = usRegVal >> 8;psModbus->ucBuf[5] = usRegVal & 0XFF;crc = usMBCRC16((uint8_t *)psModbus->ucBuf, 6);psModbus->ucBuf[6] = (uint8_t)(crc & 0xFF);psModbus->ucBuf[7] = (uint8_t)(crc >> 8);psModbus->usStatus = 0;psModbus->sendData(psModbus->ucBuf, 8);while (usTimeout != 0){if (psModbus->usStatus & 0X8000){if (psModbus->ucBuf[0] == ucSlaveAddress && psModbus->ucBuf[1] == 0X06){ret = 0;}else{ret = -2;}psModbus->usStatus = 0;break;}delay = usTimeout > 5 ? 5 : usTimeout;usTimeout -= delay;psModbus->delayms(delay);}if (psModbus->unlock != NULL){psModbus->unlock();}return ret;
}/*** 主机写多个线圈状态* @param ucSlaveAddress 从机地址* @param usAddress 线圈起始地址* @param usNum 要写的线圈数量* @param pucStateBitsBuf 存放线圈状态,1比特代表一个线圈状态* @param usTimeout 超时时间,单位毫秒* @return 0:成功 <0:执行失败*/
int MBRTUMasterWriteMultipleCoils(MBRTUMaterTypeDef *psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, const uint8_t *pucStateBitsBuf, uint16_t usTimeout)
{int ret = -1;int delay;uint16_t crc;uint16_t usIndex = 0, usBytes = 0;if (psModbus->lock != NULL){psModbus->lock();}psModbus->ucBuf[usIndex++] = ucSlaveAddress;psModbus->ucBuf[usIndex++] = 0X0F;psModbus->ucBuf[usIndex++] = usAddress & 0XFF;psModbus->ucBuf[usIndex++] = usAddress >> 8;psModbus->ucBuf[usIndex++] = usNum >> 8;psModbus->ucBuf[usIndex++] = usNum & 0XFF;usBytes = (usNum - 1) / 8 + 1;psModbus->ucBuf[usIndex++] = usBytes;while (usBytes--){psModbus->ucBuf[usIndex++] = *pucStateBitsBuf++;}crc = usMBCRC16((uint8_t *)psModbus->ucBuf, usIndex);psModbus->ucBuf[usIndex++] = (uint8_t)(crc & 0xFF);psModbus->ucBuf[usIndex++] = (uint8_t)(crc >> 8);psModbus->usStatus = 0;psModbus->sendData(psModbus->ucBuf, usIndex);while (usTimeout != 0){if (psModbus->usStatus & 0X8000){if (psModbus->ucBuf[0] == ucSlaveAddress && psModbus->ucBuf[1] == 0X0F){ret = 0;}else{ret = -2;}psModbus->usStatus = 0;break;}delay = usTimeout > 5 ? 5 : usTimeout;usTimeout -= delay;psModbus->delayms(delay);}if (psModbus->unlock != NULL){psModbus->unlock();}return ret;
}/*** 主机写多个寄存器!!!!!!!!!!!* @param ucSlaveAddress 从机地址* @param usAddress 要写的寄存器起始地址* @param usCmd 0x10* @param usNum 要写的寄存器数量* @param pusRegVal 存放要写的寄存器值* @param usTimeout 超时时间,单位毫秒* @return 0:成功 <0:执行失败*/
int MBRTUMasterWriteMultipleRegisters(MBRTUMaterTypeDef *psModbus, uint8_t ucSlaveAddress, uint16_t usAddress, uint16_t usNum, const uint16_t *pusRegVal, uint16_t usTimeout)
{int ret = -1;int delay;uint16_t crc;uint16_t usIndex = 0;if (psModbus->lock != NULL){psModbus->lock();}psModbus->ucBuf[usIndex++] = ucSlaveAddress;psModbus->ucBuf[usIndex++] = 0X10;psModbus->ucBuf[usIndex++] = usAddress & 0XFF;psModbus->ucBuf[usIndex++] = usAddress >> 8;psModbus->ucBuf[usIndex++] = usNum >> 8;psModbus->ucBuf[usIndex++] = usNum & 0XFF;psModbus->ucBuf[usIndex++] = usNum << 1;while (usNum--){psModbus->ucBuf[usIndex++] = *pusRegVal >> 8;psModbus->ucBuf[usIndex++] = *pusRegVal & 0XFF;pusRegVal++;}crc = usMBCRC16((uint8_t *)psModbus->ucBuf, usIndex);psModbus->ucBuf[usIndex++] = (uint8_t)(crc & 0xFF);psModbus->ucBuf[usIndex++] = (uint8_t)(crc >> 8);psModbus->usStatus = 0;psModbus->sendData(psModbus->ucBuf, usIndex);while (usTimeout != 0){if (psModbus->usStatus & 0X8000){if (psModbus->ucBuf[0] == ucSlaveAddress && psModbus->ucBuf[1] == 0X10){ret = 0;}else{ret = -2;}psModbus->usStatus = 0;break;}delay = usTimeout > 5 ? 5 : usTimeout;usTimeout -= delay;psModbus->delayms(delay);}if (psModbus->unlock != NULL){psModbus->unlock();}return ret;
}void MBRTUMasterRecvByteISRCallback(MBRTUMaterTypeDef *psModbus, uint8_t ucByte)
{psModbus->timerStop();if (psModbus->usStatus < sizeof(psModbus->ucBuf)){psModbus->ucBuf[psModbus->usStatus++] = ucByte;psModbus->timerStart();}else{psModbus->usStatus |= 0X8000;}
}void MBRTUMasterTimerISRCallback(MBRTUMaterTypeDef *psModbus)
{psModbus->timerStop();psModbus->usStatus |= 0X8000;
}#ifdef USE_RTOSstatic void mutex_lock(void)
{
}static void mutex_unlock(void)
{
}#endifstatic void timerStop(void)
{HAL_TIM_Base_Stop_IT(&htim3);
}static void timerStart(void)
{__HAL_TIM_SET_COUNTER(&htim3, 0);HAL_TIM_Base_Start_IT(&htim3);
}static void delayms(uint32_t nms)
{HAL_Delay(nms);
}static uint32_t sendData(const void *buf, uint32_t len)
{if (HAL_UART_Transmit(&huart2, (uint8_t *)buf, len, 100) != HAL_OK){len = 0;}return len;
}static void readCoilsCallback(uint16_t usStartAddr, uint16_t usNum, const uint8_t *pucBitsOfCoilsState, uint16_t usLen)
{uint8_t ucLoops = (usNum - 1) / 8 + 1;uint8_t ucState, ucBits;printf(" Read %d coils starting at start address %d: ", usNum, usStartAddr);while (ucLoops != 0){ucState = *pucBitsOfCoilsState++;ucBits = 0;while (usNum != 0 && ucBits < 8){printf("%d ", ucState & 0X01 ? 1 : 0);ucState >>= 1;usNum--;ucBits++;}ucLoops--;}printf("\r\n");
}static void readDiscreteInputsCallback(uint16_t usStartAddr, uint16_t usNum, const uint8_t *pucBitsOfDiscreteInputsState, uint16_t usLen)
{uint8_t ucLoops = (usNum - 1) / 8 + 1;uint8_t ucState, ucBits;printf(" Read %d discrete inputs starting at start address %d: ", usNum, usStartAddr);while (ucLoops != 0){ucState = *pucBitsOfDiscreteInputsState++;ucBits = 0;while (usNum != 0 && ucBits < 8){printf("%d ", ucState & 0X01 ? 1 : 0);ucState >>= 1;usNum--;ucBits++;}ucLoops--;}printf("\r\n");
}static void readHoldingRegistersCallback(uint16_t usStartAddr, uint16_t usNum, const uint16_t *pusHoldingRegistersVal, uint16_t usLen)
{uint16_t val;printf(" Read %d hold registers starting at start address %d: ", usNum, usStartAddr);while (usLen--){val = *pusHoldingRegistersVal++;val = ((val & 0X00FF) << 8) | ((val & 0XFF00) >> 8); // 转换大小端printf("%04X ", val);}printf("\r\n");
}static void readInputRegistersCallback(uint16_t usStartAddr, uint16_t usNum, const uint16_t *pusInputRegistersVal, uint16_t usLen)
{uint16_t val;printf(" Read %d input registers starting at start address %d: ", usNum, usStartAddr);while (usLen--){val = *pusInputRegistersVal++;val = ((val & 0X00FF) << 8) | ((val & 0XFF00) >> 8); // 转换大小端printf("%04X ", val);}printf("\r\n");
}MBRTUMaterTypeDef MBRTUHandle ={.delayms = delayms,.timerStart = timerStart,.timerStop = timerStop,.sendData = sendData,.readCoilsCallback = readCoilsCallback,.readDiscreteInputsCallback = readDiscreteInputsCallback,.readHoldingRegistersCallback = readHoldingRegistersCallback,.readInputRegistersCallback = readInputRegistersCallback,#ifdef USE_RTOS // 使用了RTOS那么需要实现互斥.lock = mutex_lock,.unlock = mutex_unlock,
#endif};
main.c
TX
extern MBRTUMaterTypeDef MBRTUHandle;
void main(){
/*.............*/while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */HAL_GPIO_WritePin(GPIOD, GPIO_PIN_7, GPIO_PIN_SET); //拉高发送MBRTUMasterWriteSingleRegister(&MBRTUHandle, 1, 6, 0X0501, 100);HAL_Delay(1000);}}
STM32主机Modbus Slave从机通信
#include "mbrtu_master.h"extern MBRTUMaterTypeDef MBRTUHandle;
for(j=0; j<=255;j++) {for(i=0;i<=8;i++) {MBRTUMasterWriteSingleRegister(&MBRTUHandle, 1, i, j, 100);HAL_Delay(1000);}
}
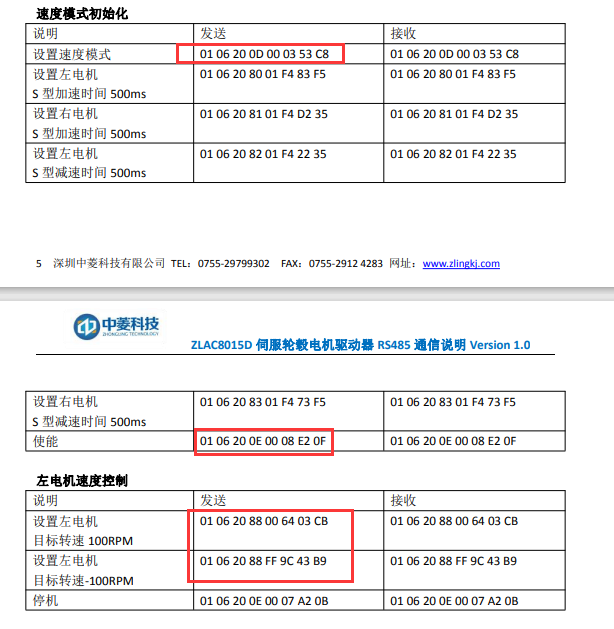
STM32按键控制发送ZLAC8015D电机指令
if (HAL_GPIO_ReadPin(WK_UP_GPIO_Port, WK_UP_Pin) == 1) {/*延时一小段时间,消除抖动*/HAL_Delay(10);/*延时时间后再来判断按键状态,如果还是按下状态说明按键确实被按下*/if (HAL_GPIO_ReadPin(WK_UP_GPIO_Port, WK_UP_Pin) == 1) {/*等待按键弹开才退出按键扫描函数*/while (HAL_GPIO_ReadPin(WK_UP_GPIO_Port, WK_UP_Pin) == 1);MBRTUMasterWriteSingleRegister(&MBRTUHandle, 1, 0X200D, 0x0003, 100);// MBRTUMasterWriteSingleRegister(&MBRTUHandle, 1, 0X2088, 0X0064, 100);}}if (HAL_GPIO_ReadPin(KEY0_GPIO_Port, KEY0_Pin) == 0) {/*延时一小段时间,消除抖动*/HAL_Delay(10);/*延时时间后再来判断按键状态,如果还是按下状态说明按键确实被按下*/if (HAL_GPIO_ReadPin(KEY0_GPIO_Port, KEY0_Pin) == 0) {/*等待按键弹开才退出按键扫描函数*/while (HAL_GPIO_ReadPin(KEY0_GPIO_Port, KEY0_Pin) == 0);MBRTUMasterWriteSingleRegister(&MBRTUHandle, 1, 0X200E, 0x0008, 100);HAL_Delay(10);MBRTUMasterWriteSingleRegister(&MBRTUHandle, 1, 0X200E, 0x0010, 100);}}if (HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == 0) {/*延时一小段时间,消除抖动*/HAL_Delay(10);/*延时时间后再来判断按键状态,如果还是按下状态说明按键确实被按下*/if (HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == 0) {/*等待按键弹开才退出按键扫描函数*/while (HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == 0);MBRTUMasterWriteSingleRegister(&MBRTUHandle, 1, 0X2088, 0X0064, 100);
// HAL_Delay(10);MBRTUMasterWriteSingleRegister(&MBRTUHandle, 1, 0X2089, 0X0064, 100);HAL_GPIO_TogglePin(GPIOE, GPIO_PIN_5);}}}
指令依次是
设置速度模式
使能
电机同步启动
设置左电机目标转速100RPM
设置右点击目标转速100RPM
、
相关文章:
STM32HAL库RS485-ModBus协议控制伺服电机
STM32HAL库RS485-ModBus协议控制伺服电机 一个月前,接手了一个学长的毕设小车,小车采用rs485通信的modbus协议驱动轮毂电机,与往常我学习的pwm控制电机方法大相径庭,在这里以这篇博客记录下该学习过程。 小车主要架构 电机型号 …...
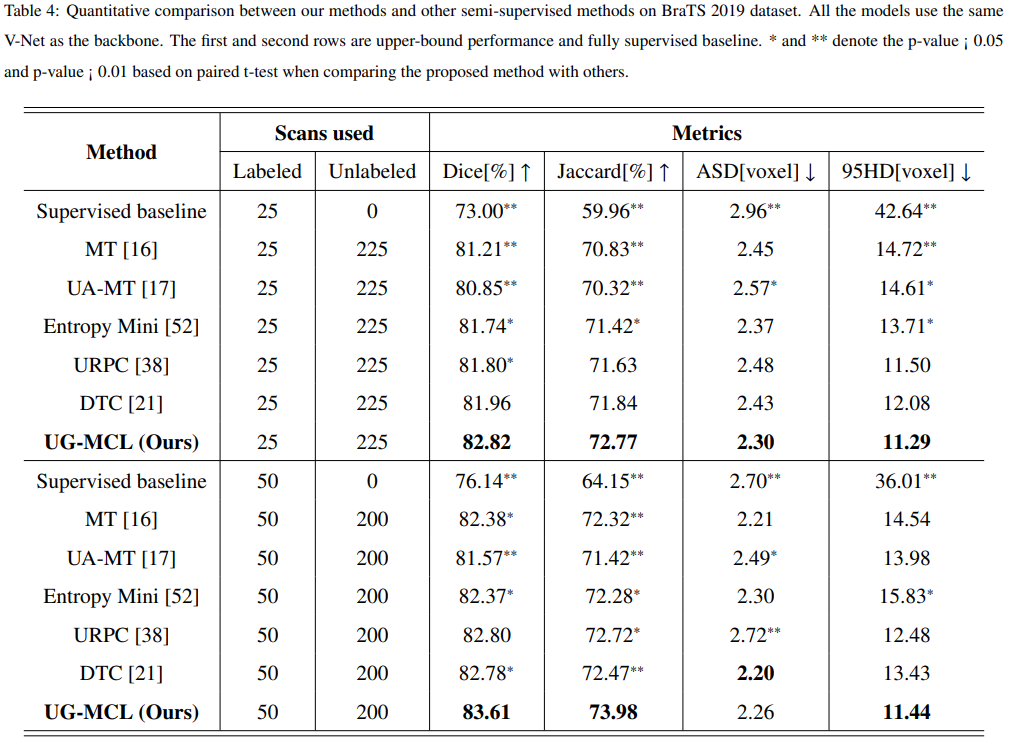
【医学图像】图像分割系列.3 (uncertainty)
介绍几篇使用不确定性引导的医学图像分割论文:UA-MT(MICCAI2019),SSL4MIS(MICCAI2021),UG-MCL(AIIM2022). Uncertainty-aware Self-ensembling Model for Semi-supervise…...

Java有线程安全的set吗?
在Java中,有线程安全的Set实现。一个常用的线程安全的Set实现是ConcurrentSkipListSet。ConcurrentSkipListSet是一个有序的集合,基于跳表(SkipList)的数据结构实现。它提供了线程安全的操作,并且具有较好的性能。 接下来笔者用一段简单的Jav…...
《HelloGitHub》第 86 期
兴趣是最好的老师,HelloGitHub 让你对编程感兴趣! 简介 HelloGitHub 分享 GitHub 上有趣、入门级的开源项目。 https://github.com/521xueweihan/HelloGitHub 这里有实战项目、入门教程、黑科技、开源书籍、大厂开源项目等,涵盖多种编程语言 …...

LDGRB-01 3BSE013177R1 将数字输入和继电器输出结合
LDGRB-01 3BSE013177R1包的一部分是全面的通信选项,包括Modbus主/从或CS31,这种产品很少提供。128kB的用户内存和0.1秒/指令的程序处理时间只是AC500-eCo令人印象深刻的性能的两个例子。除了与现有AC500系列的互操作性,AC500-eCo系统还使用基…...

手动计算校正年龄、性别后的标准化死亡率 (SMR)
分析队列人群有无死亡人数超额,通常应用标准人群死亡率来校正,即刻观察到中的实际死亡数(D)与定一个标准的死亡人数(E),D与E之比称为死亡比(standarized Mortality ratio,…...

Java组合模式:构建多层次公司组织架构
在现实生活中,常常会遇到用树形结构组织的一些场景,比如国家省市,学校班级,文件目录,分级导航菜单,以及典型的公司组织架构,整个层次结构自顶向下呈现一颗倒置的树。这种树形结构在面向对象的世…...
Langchain-ChatGLM:基于本地知识库问答
文章目录 ChatGLM与Langchain简介ChatGLM-6B简介ChatGLM-6B是什么ChatGLM-6B具备的能力ChatGLM-6B具备的应用 Langchain简介Langchain是什么Langchain的核心模块Langchain的应用场景 ChatGLM与Langchain项目介绍知识库问答实现步骤ChatGLM与Langchain项目特点 项目主体结构项目…...

设计模式十 适配器模式
适配器模式 适配器模式是一种结构型设计模式。作用:当接口无法和类匹配到一起工作时,通过适配器将接口变换成可以和类匹配到一起的接口。(注:适配器模式主要解决接口兼容性问题) 适配器的优点与缺点: 优…...
1.6 初探JdbcTemplate操作
一、JdbcTemplate案例演示 1、创建数据库与表 (1)创建数据库 执行命令:CREATE DATABASE simonshop DEFAULT CHARACTER SET utf8mb4 COLLATE utf8mb4_unicode_ci; 或者利用菜单方式创建数据库 - simonshop 打开数据库simonshop &#x…...
为什么要用线程池?
线程池是一种管理和复用线程资源的机制,它由一个线程池管理器和一组工作线程组成。线程池管理器负责创建和销毁线程池,以及管理线程池中的工作线程。工作线程则负责执行具体的任务。 线程池的主要作用是管理和复用线程资源,避免了线程的频繁…...

c语言的预处理和编译
预处理 文件包含 当预处理器发现#include指令时,会查看后面的文件名并把文件的内容包含到当前文件中 两种写法 尖括号:引用的是编译器的库路径里面的头文件。 双引号:引用的是程序目录中相对路径中的头文件,如果找不到再去上面…...
网络安全必学 SQL 注入
1.1 .Sql 注入攻击原理 SQL 注入漏洞可以说是在企业运营中会遇到的最具破坏性的漏洞之一,它也是目前被利用得最多的漏洞。要学会如何防御 SQL 注入,首先我们要学习它的原理。 针对 SQL 注入的攻击行为可描述为通过在用户可控参数中注入 SQL 语法&#x…...

Docker基础知识详解
✅作者简介:热爱Java后端开发的一名学习者,大家可以跟我一起讨论各种问题喔。 🍎个人主页:Hhzzy99 🍊个人信条:坚持就是胜利! 💞当前专栏:文章 🥭本文内容&am…...

腾讯、阿里入选首批“双柜台证券”,港股市场迎盛夏升温?
6月5日,香港交易所发布公告,将于6月19日在香港证券市场推出“港币-人民币双柜台模式”,当日确定有21只证券指定为双柜台证券。同时,港交所还表示,在双柜台模式推出前,更多证券或会被接纳并加入双…...

CentOS7 使用Docker 安装MySQL
CentOS7 使用Docker 安装MySQL Docker的相关知识本篇不会再概述,有疑惑的同学请自行查找相关知识。本篇只是介绍如何在CentOS7下使用Docker安装相应的镜像。 可登陆Docker官网 https://docs.docker.com 之后可以跟着官方的步骤进行安装。 clipboard.png 具体安装过…...

注解和反射复习
注解 注解:给程序和人看的,被程序读取,jdk5.0引用 内置注解 override:修饰方法,方法声明和重写父类方法, Deprecated:修饰,不推荐使用 suppressWarnings用来抑制编译时的警告,必须添加一个或多个参数s…...

RocketMQ的demo代码
下面是一个使用Java实现的RocketMQ示例代码,用于发送和消费消息: 首先,您需要下载并安装RocketMQ,并启动NameServer和Broker。 接下来,您可以使用以下示例代码来发送和消费消息: Producer.java文件&…...
)
C++ 连接、操作postgreSQL(基于libpq库)
C++ 连接postgreSQL(基于libpq库) 1.环境2.数据库操作2.1. c++ 连接数据库2.2. c++ 删除数据库属性表内容2.3. c++ 插入数据库属性表内容2.4 c++ 关闭数据库1.环境 使用libpq库来链接postgresql数据库,主要用到的头文件是这个: #include "libpq-fe.h"2.数据库操…...

Node.js技术简介及其在Web开发中的应用
Node.js是一个基于Chrome V8引擎的JavaScript运行时环境,使得JavaScript能够在服务器端运行。Node.js采用事件驱动、非阻塞I/O模型,能够处理大量并发请求,非常适合处理I/O密集型的应用程序。本文将介绍Node.js的特点、优势以及在Web开发中的应…...

谷歌浏览器插件
项目中有时候会用到插件 sync-cookie-extension1.0.0:开发环境同步测试 cookie 至 localhost,便于本地请求服务携带 cookie 参考地址:https://juejin.cn/post/7139354571712757767 里面有源码下载下来,加在到扩展即可使用FeHelp…...

C++_核心编程_多态案例二-制作饮品
#include <iostream> #include <string> using namespace std;/*制作饮品的大致流程为:煮水 - 冲泡 - 倒入杯中 - 加入辅料 利用多态技术实现本案例,提供抽象制作饮品基类,提供子类制作咖啡和茶叶*//*基类*/ class AbstractDr…...

Objective-C常用命名规范总结
【OC】常用命名规范总结 文章目录 【OC】常用命名规范总结1.类名(Class Name)2.协议名(Protocol Name)3.方法名(Method Name)4.属性名(Property Name)5.局部变量/实例变量(Local / Instance Variables&…...

Linux简单的操作
ls ls 查看当前目录 ll 查看详细内容 ls -a 查看所有的内容 ls --help 查看方法文档 pwd pwd 查看当前路径 cd cd 转路径 cd .. 转上一级路径 cd 名 转换路径 …...
HTML 列表、表格、表单
1 列表标签 作用:布局内容排列整齐的区域 列表分类:无序列表、有序列表、定义列表。 例如: 1.1 无序列表 标签:ul 嵌套 li,ul是无序列表,li是列表条目。 注意事项: ul 标签里面只能包裹 li…...

2021-03-15 iview一些问题
1.iview 在使用tree组件时,发现没有set类的方法,只有get,那么要改变tree值,只能遍历treeData,递归修改treeData的checked,发现无法更改,原因在于check模式下,子元素的勾选状态跟父节…...
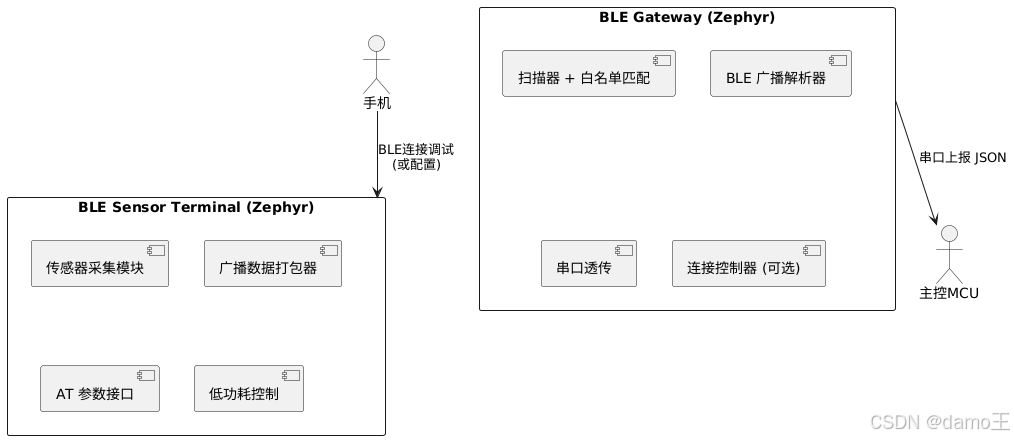
【Zephyr 系列 10】实战项目:打造一个蓝牙传感器终端 + 网关系统(完整架构与全栈实现)
🧠关键词:Zephyr、BLE、终端、网关、广播、连接、传感器、数据采集、低功耗、系统集成 📌目标读者:希望基于 Zephyr 构建 BLE 系统架构、实现终端与网关协作、具备产品交付能力的开发者 📊篇幅字数:约 5200 字 ✨ 项目总览 在物联网实际项目中,**“终端 + 网关”**是…...

【C语言练习】080. 使用C语言实现简单的数据库操作
080. 使用C语言实现简单的数据库操作 080. 使用C语言实现简单的数据库操作使用原生APIODBC接口第三方库ORM框架文件模拟1. 安装SQLite2. 示例代码:使用SQLite创建数据库、表和插入数据3. 编译和运行4. 示例运行输出:5. 注意事项6. 总结080. 使用C语言实现简单的数据库操作 在…...
Android 之 kotlin 语言学习笔记三(Kotlin-Java 互操作)
参考官方文档:https://developer.android.google.cn/kotlin/interop?hlzh-cn 一、Java(供 Kotlin 使用) 1、不得使用硬关键字 不要使用 Kotlin 的任何硬关键字作为方法的名称 或字段。允许使用 Kotlin 的软关键字、修饰符关键字和特殊标识…...
-HIve数据分析)
大数据学习(132)-HIve数据分析
🍋🍋大数据学习🍋🍋 🔥系列专栏: 👑哲学语录: 用力所能及,改变世界。 💖如果觉得博主的文章还不错的话,请点赞👍收藏⭐️留言Ǵ…...