驱动开发 day3 (模块化驱动启动led,蜂鸣器,风扇,震动马达)
模块化驱动启动led,蜂鸣器,风扇,震动马达并加上Makefile
封装模块化驱动,可自由安装卸载驱动,便于驱动更新(附图)
1.安装模块驱动同时初始化各个设备并使能
2.该驱动会自动创建驱动节点.
3.通过c函数程序输入控制各个设备
4.卸载模块驱动
//编译驱动(注意Makefile的编译到移植到开发板的内核)
make arch=arm
//安装驱动
insmod mycdev.ko
//卸载驱动
rmmod mycdev
//编译fun.c 函数(用到交叉工具编译)
arm-linux-gnueabihf-gcc fun.c
head.h //头文件
#ifndef __HEAD_H__
#define __HEAD_H__typedef struct{unsigned int MODER;unsigned int OTYPER;unsigned int OSPEEDR;unsigned int PUPDR;unsigned int IDR;unsigned int ODR;
}gpio_t;
#define PHY_LED1_ADDR 0X50006000 //GPIOE 10
#define PHY_LED2_ADDR 0X50007000 //GPIOF 10
#define PHY_LED3_ADDR 0X50006000 //GPIOE 8
#define PHY_RCC_ADDR 0X50000A28 //RCC#define PHY_FAN_ADDR 0X50006000 //GPIOE 9 TIM1 风扇
#define PHY_ATO_ADDR 0X50007000 //GPIOF 6 TIM16 震动马达
#define PHY_WMM_ADDR 0X50003000 //GPIOB 6 TIM4 蜂鸣器//功能码
#define LED_ON _IOW('1',1,int)
#define LED_OFF _IOW('1',0,int)#endif // MACRO
mycmod.c //驱动函数
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include "head.h"unsigned int major;
char kbuf[128] = {0};gpio_t *vir_led1;
gpio_t *vir_led2;
gpio_t *vir_led3;gpio_t *vir_wmm;
gpio_t *vir_fan;
gpio_t *vir_ato;unsigned int *vir_rcc;struct class *cls;
struct device *dev;int mycdev_open(struct inode *inode,struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}long mycdev_ioctl(struct file *file,unsigned int cmd,unsigned long arg)
{int which;copy_from_user(&which,(void *)arg,4);switch (cmd){case LED_ON:switch (which){case 1: // LED1vir_led1->ODR |= (0x1 << 10); // LED1开灯break;case 2: // LED2vir_led2->ODR |= (0x1 << 10); // LED2开灯break;case 3: // LED3vir_led3->ODR |= (0x1 << 8); // LED3开灯break;case 4: // FANvir_fan->ODR |= (0x1 << 9); // FAN开灯break;case 5: // ATOvir_ato->ODR |= (0x1 << 6); // ATO开灯break;case 6: // WMMvir_wmm->ODR |= (0x1 << 6); // WMM开灯break;}break;case LED_OFF:switch (which){case 1:vir_led1->ODR &= (~(0X1 << 10));break;case 2:vir_led2->ODR &= (~(0X1 << 10));break;case 3:vir_led3->ODR &= (~(0X1 << 8));break;case 4:vir_fan->ODR &= (~(0X1 << 9));break;case 5:vir_ato->ODR &= (~(0X1 << 6));break;case 6:vir_wmm->ODR &= (~(0X1 << 6));break;default:return -1;}default:return -1;}return 0;
}int mycdev_close(struct inode *inode,struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}//定义操作方法结构体变量并赋值
struct file_operations fops={.open = mycdev_open,.release = mycdev_close,.unlocked_ioctl = mycdev_ioctl,
};int all_led_init(void)
{// 寄存器地址的映射vir_led1 = ioremap(PHY_LED1_ADDR, sizeof(gpio_t));if (vir_led1 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led2 = ioremap(PHY_LED2_ADDR, sizeof(gpio_t));if (vir_led2 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led3 = vir_led1;vir_fan = vir_led1;vir_ato = vir_led2;vir_wmm = ioremap(PHY_WMM_ADDR, sizeof(gpio_t));if (vir_wmm == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_rcc = ioremap(PHY_RCC_ADDR, 4);if (vir_rcc == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}printk("物理地址映射成功\n");// 寄存器的初始化// rcc(*vir_rcc) |= (3 << 4);(*vir_rcc) |= (1 << 1);// led1vir_led1->MODER &= (~(3 << 20));vir_led1->MODER |= (1 << 20);vir_led1->ODR &= (~(1 << 10));// led2vir_led2->MODER &= (~(3 << 20));vir_led2->MODER |= (1 << 20);vir_led2->ODR &= (~(1 << 10));// led3vir_led3->MODER &= (~(3 << 16));vir_led1->MODER |= (1 << 16);vir_led1->ODR &= (~(1 << 8));// WMM B 6vir_wmm->MODER &= (~(3 << 12));vir_wmm->MODER |= (1 << 12);vir_wmm->ODR &= (~(1 << 6));// FAM E 9vir_fan->MODER &= (~(3 << 18));vir_fan->MODER |= (1 << 18);vir_fan->ODR &= (~(1 << 9));// ATO F 6vir_ato->MODER &= (~(3 << 12));vir_ato->MODER |= (1 << 12);vir_ato->ODR &= (~(1 << 6));printk("寄存器初始化成功\n");return 0;
}static int __init mycdev_init(void)
{int i;//字符设备驱动注册major = register_chrdev(0,"mycdev",&fops);if(major < 0){printk("注册失败\n");return major;}printk("注册成功major = %d\n",major);//向上提交目录cls = class_create(THIS_MODULE,"mycdev");if(IS_ERR(cls)){printk("向上提交目录失败\n");return -PTR_ERR(cls);}printk("向上提交目录信息成功\n");//向上提交设备节点信息for(i = 0;i < 3; i++){dev = device_create(cls,NULL,MKDEV(major,i),NULL,"myled%d",i);if(IS_ERR(dev)){printk("向上提交设备节点信息失败\n");return -PTR_ERR(dev);}}printk("向上提交设备节点信息成功\n");//寄存器映射以及初始化all_led_init();return 0;}
static void __exit mycdev_exit(void)
{int i;//设备初始化all_led_init();//取消虚拟映射iounmap(vir_led1);iounmap(vir_led2);iounmap(vir_led3);iounmap(vir_rcc);//销毁节点信息for(i = 0; i < 3; i++){device_destroy(cls,MKDEV(major,i));}//销毁目录信息class_destroy(cls);//注销字符设备驱动unregister_chrdev(major,"mycdev");printk("出口函数\n");
}module_init(mycdev_init);module_exit(mycdev_exit);MODULE_LICENSE("GPL");
fun.c
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <sys/ioctl.h>
#include <string.h>
#include "head.h"int main(int argc, char const *argv[])
{/* code */int a,b;char buf[128] = {0};printf("调用open\n");int fd = open ("/dev/myled0",O_RDWR);if(fd < 0){printf("打开设备文件失败\n");exit(-1);}while(1){//从终端读取printf("请输入指令\n");printf("0(关) 1(开)\n");printf("请输入>");scanf("%d",&a);if(a){printf("打开以下设备\n");}else{printf("关闭以下设备\n");}printf(" 1(LED1) 2(LED2) 3(LED3)\n");printf(" 4(FAN) 5(ATO) 6(WMM)\n");printf("请输入要控制的设备:");scanf("%d",&b);switch(a){case 1:ioctl(fd,LED_ON,&b);//开灯break;case 0:ioctl(fd,LED_OFF,&b);break;}}printf("调用close\n");close (fd); return 0;
}Makefile
modname ?= mycdevarch ?= armifeq ($(arch),arm)
KERNELDIR:= /home/ubuntu/13_UBOOT/linux-stm32mp-5.10.61-stm32mp-r2-r0/linux-5.10.61
else
KERNELDIR:=/lib/modules/$(shell uname -r)/build/
endifPWD:=$(shell pwd)all:make -C $(KERNELDIR) M=$(PWD) modulesclean:make -C $(KERNELDIR) M=$(PWD) cleanobj-m:=$(modname).o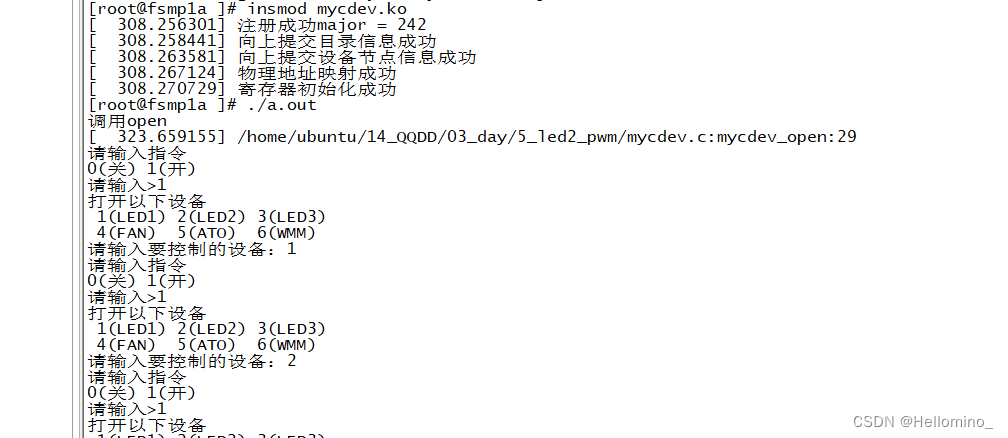
相关文章:
驱动开发 day3 (模块化驱动启动led,蜂鸣器,风扇,震动马达)
模块化驱动启动led,蜂鸣器,风扇,震动马达并加上Makefile 封装模块化驱动,可自由安装卸载驱动,便于驱动更新(附图) 1.安装模块驱动同时初始化各个设备并使能 2.该驱动会自动创建驱动节点. 3.通过c函数程序输入控制各个设备 4.卸载模块驱动 //编译驱动…...
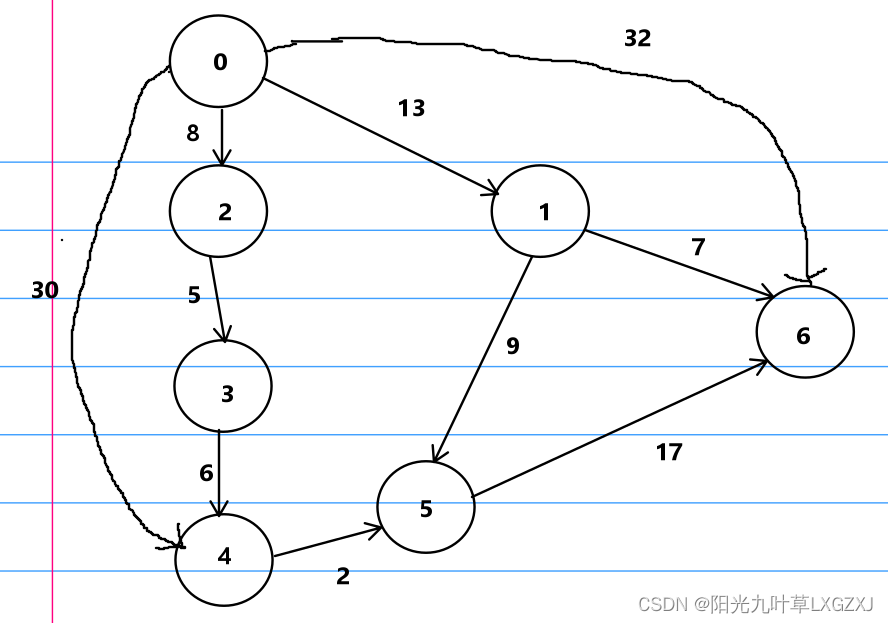
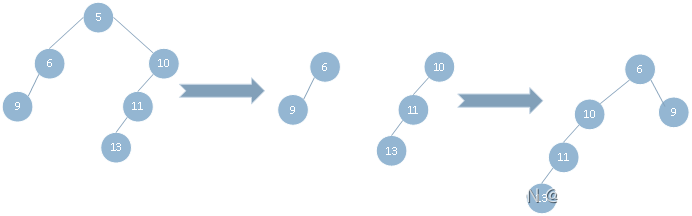
数据结构与算法基础-学习-27-图之最短路径之Dijkstra(迪杰斯特拉)算法
一、最短路径应用案例 例如从北京到上海旅游,有多条路可以到目的地,哪条路线最短,哪条路线最省钱,就是典型的最短路径问题。 二、最短路径问题分类 最短路径问题可以分为两类,第一类为:两点间最短路径。第…...
Windows Server 2012 能使用的playwright版本
由于在harkua_bot里面使用到了playwright,我的服务器又是Windows Server 2012 R2,最新版playwright不支持Windows Server 2012 R2,支持Windows Server 2016以上,所以有了这个需求 https://cdn.npmmirror.com/binaries/playwright…...

css实现溢出变为省略号
单行文本溢出省略 text-overflow:规定当文本溢出时,显示省略符号来代表被修剪的文本 white-space:设置文字在一行显示,不能换行 overflow:文字长度超出限定宽度,则隐藏超出的内容overflow设为hidden&#…...

nginx如何配置两个服务器的连接
nginx 中通过server_name listen的方式配置多个服务器 nginx配置两个站点的windows操作方法,双域名双站点...

Linux环境Arduino IDE中配置ATOM S3
linux选择ubuntu发行版。 硬件设备有多小呢: 功能超级强大。 之前的ROS1和ROS2案例已经全部移植完成并测试结束(三轮纯人力校验😎)。 官网文档信息非常非常好: https://docs.m5stack.com/zh_CN/quick_start/atoms3…...
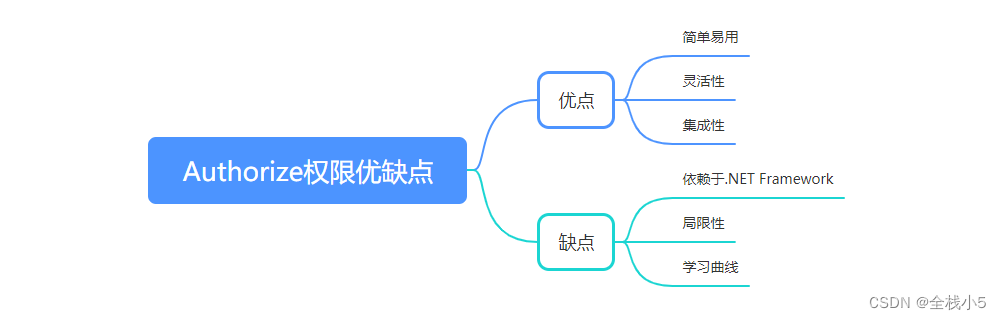
【C#】.Net Framework框架下的Authorize权限类
2023年,第31周,第3篇文章。给自己一个目标,然后坚持总会有收货,不信你试试! 在C#的.NET Framework中,你可以使用Authorize类来处理权限认证。Authorize类位于System.Web.Mvc命名空间中,它提供了…...

C++ list底层实现原理
文章目录 一、list底层实现二、类构成三、构造函数四、迭代器五、获取第一个元素六、获取最后一个元素七、插入元素 一句话:list底层实现一个双向循环链表 一、list底层实现 一个双向循环链表 二、类构成 class list : protected_List_base_list_base.lsit_impl…...

C#实现数字验证码
开发环境:VS2019,.NET Core 3.1,ASP.NET Core API 1、建立一个验证码控制器 新建两个方法Create和Check,Create用于创建验证码,Check用于验证它是否有效。 声明一个静态类变量存放列表,列表中存放包含令…...

Git的常用命令以及使用场景
文章目录 1.前言2.工作区,暂存区,版本库简介3.Git的常用命令4.版本回退5.撤销修改6.删除文件7.总结 1.前言 在学习Git命令之前,需要先了解工作区,暂存区和版本库这三个概念 2.工作区,暂存区,版本库简介 在使用Git进行版本控制时,有三个重要的概念:工作…...

tcp keepalive
tcp keepalive用于检查两者之间的链路是否正常,或防止链路断开。 一旦建立了TCP连接,该连接被定义为有效,直到一方关闭它。一旦连接进入连接状态,它将无限期地保持连接状态。但实际上,这种联系不会无限期地持续下去。如…...
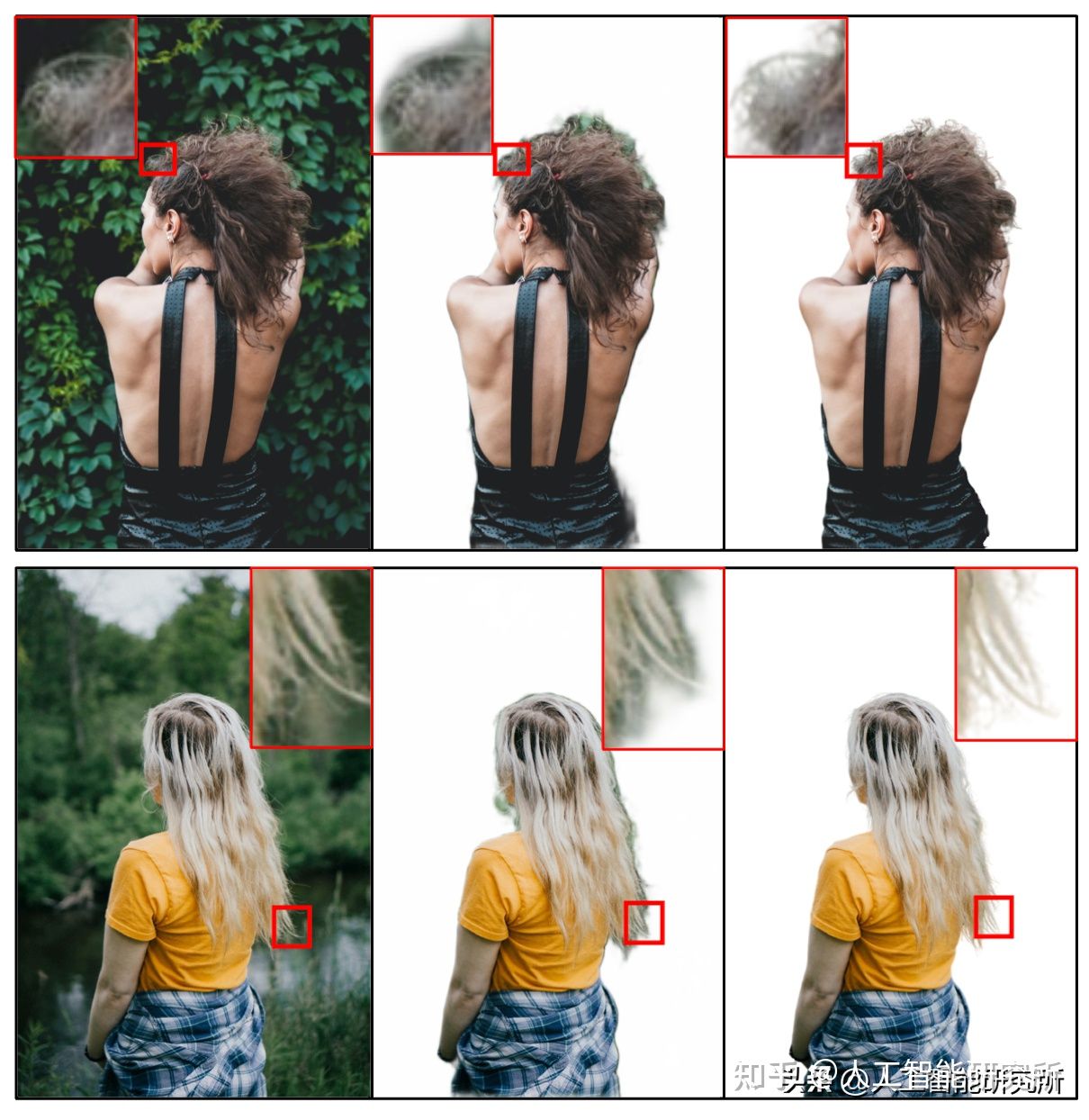
PP-Matting: AI高精度图像前景Matting,让抠图轻而易举
分割和Matting的一个重要区别是:分割返回的是像素分类标签,其结果是整型数据;而Matting返回的是属于前景或背景的概率P,从而在前景与背景交互区域产生渐变的效果,使得抠图更加自然。Matting分割模型训练完成后,对于原始图像每个位置上的像素,都将生成一个表示其前景透明…...

VUE3-01
1.选项式和组合式 选项式API:按照作用组织代码 组合式API:按照功能组织代码 2.<script setup> <template><div class"about"><h1>{{name}}</h1><button click"sayHello">测试</button>…...
分库分表之基于Shardingjdbc+docker+mysql主从架构实现读写分离(二)
说明:如果实现了docker部署mysql并完成主从复制的话再继续,本篇文章主要说明springboot配置实现Shardingjdbc进行读写分离操作。 如果没实现docker部署mysql实现主从架构的话点击我 Shardingjdbc配置介绍(版本:5.3.2)…...

Python 进阶(四):日期和时间(time、datetime、calendar 模块)
❤️ 博客主页:水滴技术 🌸 订阅专栏:Python 入门核心技术 🚀 支持水滴:点赞👍 收藏⭐ 留言💬 文章目录 1. time模块1.1 获取当前时间1.2 时间休眠1.3 格式化时间 2. datetime模块2.1 获取当前…...

Transformer背景介绍
目录 Transformer的诞生Transformer的优势Transformer的市场 Transformer的诞生 论文地址 Transformer的优势 Transformer的市场...

深入理解BeanDefinition和Spring Beans
深入理解BeanDefinition和Spring Beans 引言 在Spring框架中,BeanDefinition和Spring Beans是非常重要的概念。BeanDefinition定义了Spring Bean的元数据,而Spring Beans是应用程序中的对象实例。理解BeanDefinition和Spring Beans的概念和使用方法对于…...
实验六 调度器-实验部分
目录 一、知识点 1.进程调度器设计的目标 1.1.进程的生命周期 1.2.用户进程创建与内核进程创建 1.3.进程调度器的设计目标 2.ucore 调度器框架 2.1.调度初始化 2.2.调度过程 2.2.1.调度整体流程 2.2.2.设计考虑要点 2.2.3.数据结构 2.2.4.调度框架应与调度算法无关…...

基于飞桨paddle波士顿房价预测练习模型测试代码
基于飞桨paddle波士顿房价预测练习模型测试代码 导入基础库 #paddle:飞桨的主库,paddle 根目录下保留了常用API的别名,当前包括:paddle.tensor、paddle.framework、paddle.device目录下的所有API; import paddle #Lin…...
只会“点点点”,凭什么让开发看的起你?
众所周知,如今无论是大厂还是中小厂,自动化测试基本是标配了,毕竟像双 11、618 这种活动中庞大繁杂的系统,以及多端发布、多版本、机型发布等需求,但只会“写一些自动化脚本”很难胜任。这一点在招聘要求中就能看出来。…...

浅谈 React Hooks
React Hooks 是 React 16.8 引入的一组 API,用于在函数组件中使用 state 和其他 React 特性(例如生命周期方法、context 等)。Hooks 通过简洁的函数接口,解决了状态与 UI 的高度解耦,通过函数式编程范式实现更灵活 Rea…...

调用支付宝接口响应40004 SYSTEM_ERROR问题排查
在对接支付宝API的时候,遇到了一些问题,记录一下排查过程。 Body:{"datadigital_fincloud_generalsaas_face_certify_initialize_response":{"msg":"Business Failed","code":"40004","sub_msg…...
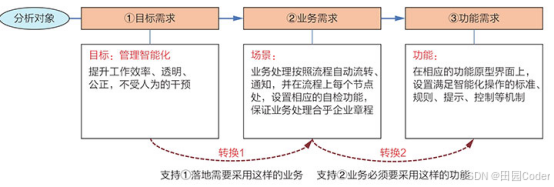
大话软工笔记—需求分析概述
需求分析,就是要对需求调研收集到的资料信息逐个地进行拆分、研究,从大量的不确定“需求”中确定出哪些需求最终要转换为确定的“功能需求”。 需求分析的作用非常重要,后续设计的依据主要来自于需求分析的成果,包括: 项目的目的…...
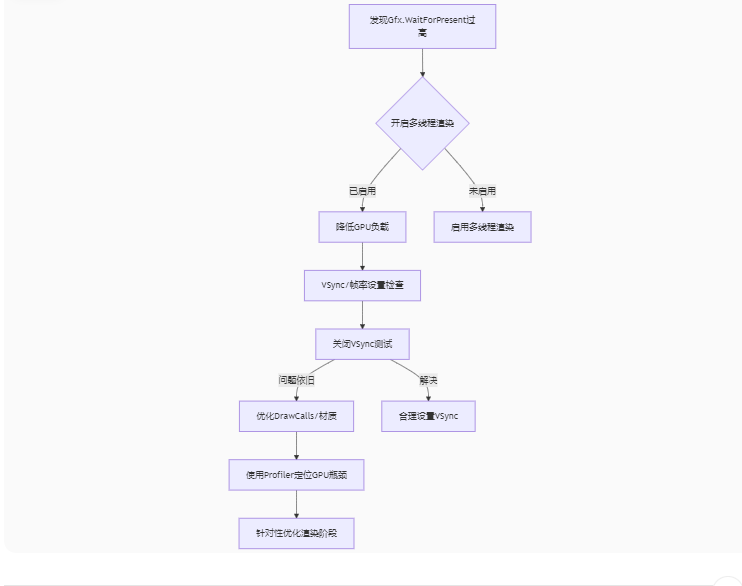
Unity3D中Gfx.WaitForPresent优化方案
前言 在Unity中,Gfx.WaitForPresent占用CPU过高通常表示主线程在等待GPU完成渲染(即CPU被阻塞),这表明存在GPU瓶颈或垂直同步/帧率设置问题。以下是系统的优化方案: 对惹,这里有一个游戏开发交流小组&…...

MySQL 隔离级别:脏读、幻读及不可重复读的原理与示例
一、MySQL 隔离级别 MySQL 提供了四种隔离级别,用于控制事务之间的并发访问以及数据的可见性,不同隔离级别对脏读、幻读、不可重复读这几种并发数据问题有着不同的处理方式,具体如下: 隔离级别脏读不可重复读幻读性能特点及锁机制读未提交(READ UNCOMMITTED)允许出现允许…...
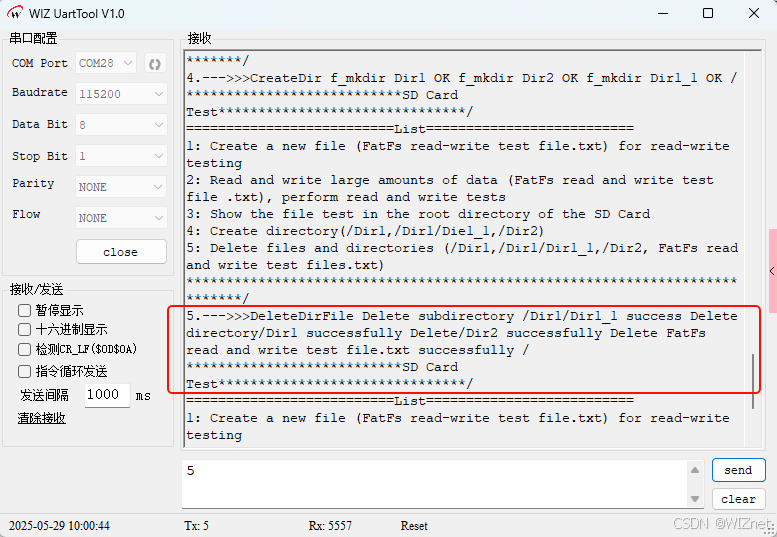
【第二十一章 SDIO接口(SDIO)】
第二十一章 SDIO接口 目录 第二十一章 SDIO接口(SDIO) 1 SDIO 主要功能 2 SDIO 总线拓扑 3 SDIO 功能描述 3.1 SDIO 适配器 3.2 SDIOAHB 接口 4 卡功能描述 4.1 卡识别模式 4.2 卡复位 4.3 操作电压范围确认 4.4 卡识别过程 4.5 写数据块 4.6 读数据块 4.7 数据流…...
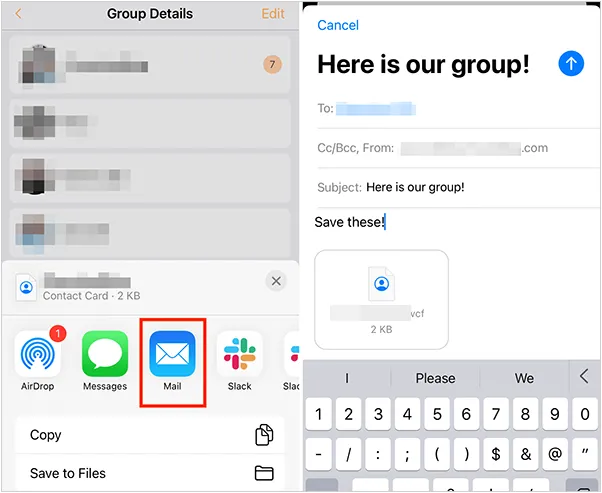
如何将联系人从 iPhone 转移到 Android
从 iPhone 换到 Android 手机时,你可能需要保留重要的数据,例如通讯录。好在,将通讯录从 iPhone 转移到 Android 手机非常简单,你可以从本文中学习 6 种可靠的方法,确保随时保持连接,不错过任何信息。 第 1…...

vue3 定时器-定义全局方法 vue+ts
1.创建ts文件 路径:src/utils/timer.ts 完整代码: import { onUnmounted } from vuetype TimerCallback (...args: any[]) > voidexport function useGlobalTimer() {const timers: Map<number, NodeJS.Timeout> new Map()// 创建定时器con…...

【git】把本地更改提交远程新分支feature_g
创建并切换新分支 git checkout -b feature_g 添加并提交更改 git add . git commit -m “实现图片上传功能” 推送到远程 git push -u origin feature_g...
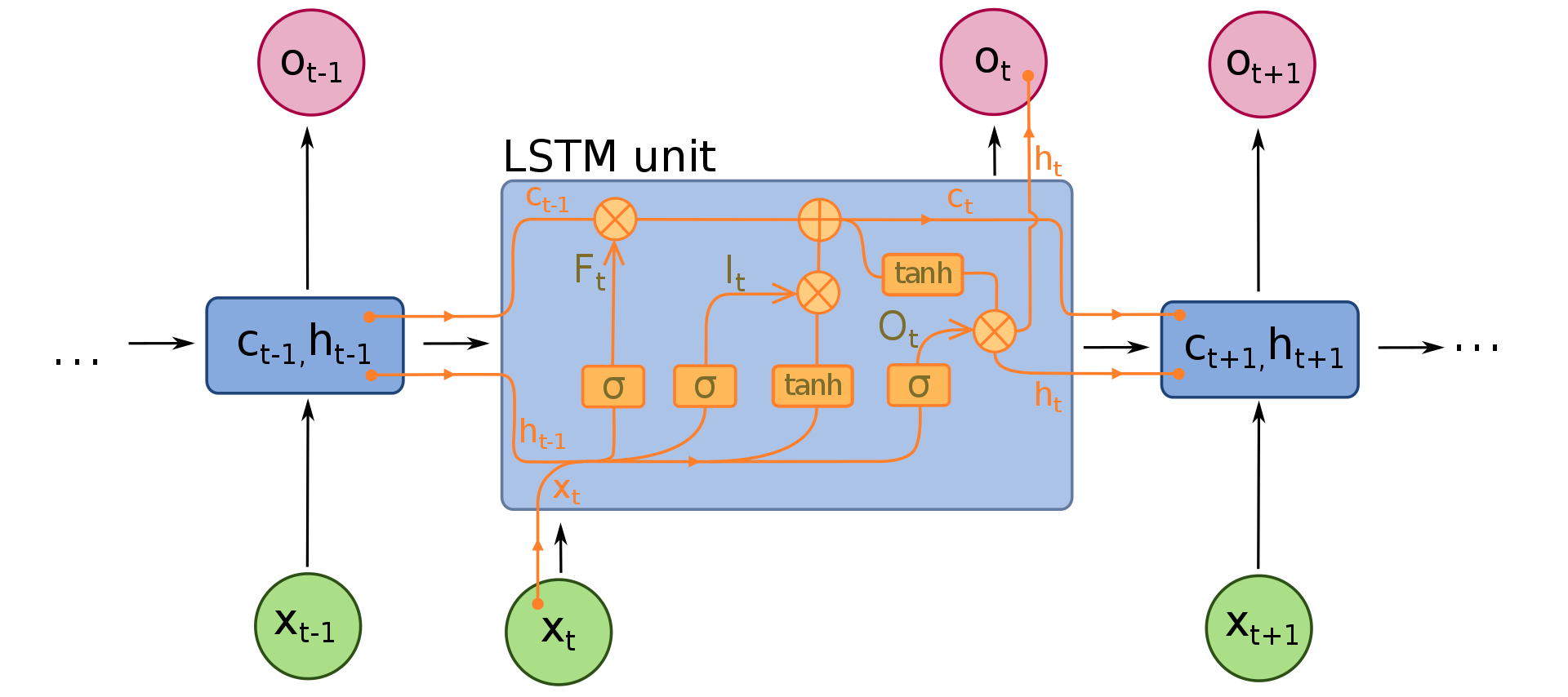
NLP学习路线图(二十三):长短期记忆网络(LSTM)
在自然语言处理(NLP)领域,我们时刻面临着处理序列数据的核心挑战。无论是理解句子的结构、分析文本的情感,还是实现语言的翻译,都需要模型能够捕捉词语之间依时序产生的复杂依赖关系。传统的神经网络结构在处理这种序列依赖时显得力不从心,而循环神经网络(RNN) 曾被视为…...