无人车沿着指定线路自动驾驶与远程控制的实践应用
有了前面颜色识别跟踪的基础之后,我们就可以设定颜色路径,让无人车沿着指定线路做自动驾驶了,视频:PID控制无人车自动驾驶
有了前几章的知识铺垫,就比较简单了,也是属于颜色识别的一种应用,主要是掌握自动驾驶中的一些基础知识,这样就可以进一步去了解在无人驾驶当中遇到的各种问题
1、导入库并初始化
from jetbotmini import Camera
from jetbotmini import bgr8_to_jpeg
from IPython.display import display
from jetbotmini import Robot
import numpy as np
import torch
import torchvision
import cv2
import traitlets
import ipywidgets.widgets as widgets
import numpy as np#初始化摄像头
camera = Camera.instance(width=300, height=300)
#初始化机器人马达
robot = Robot()#使用PID控制
import PIDturn_gain = 1.7
turn_gain_pid = PID.PositionalPID(0.15, 0, 0.05)这部分很简单,依然是初始化摄像头用来颜色识别,机器人也叫马达,用来驱动轮子的运动,加一个PID控制,让无人车更加的平稳。
2、显示部件
# 红色数组
color_lower=np.array([156,43,46])
color_upper = np.array([180, 255, 255])image_widget = widgets.Image(format='jpeg', width=300, height=300)
speed_widget = widgets.FloatSlider(value=0.4, min=0.0, max=1.0, description='speed')display(widgets.VBox([widgets.HBox([image_widget]),speed_widget,
]))width = int(image_widget.width)
height = int(image_widget.height)def execute(change):global turn_gaintarget_value_speed = 0#更新图片值frame = camera.valueframe = cv2.resize(frame, (300, 300))frame = cv2.GaussianBlur(frame,(5,5),0) hsv =cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)mask=cv2.inRange(hsv,color_lower,color_upper) mask=cv2.erode(mask,None,iterations=2)mask=cv2.dilate(mask,None,iterations=2)mask=cv2.GaussianBlur(mask,(3,3),0) cnts=cv2.findContours(mask.copy(),cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[-2] # 检测到目标if len(cnts)>0:cnt = max (cnts,key=cv2.contourArea)(color_x,color_y),color_radius=cv2.minEnclosingCircle(cnt)if color_radius > 10:# 将检测到的颜色标记出来cv2.circle(frame,(int(color_x),int(color_y)),int(color_radius),(255,0,255),2) # 中心偏移量center = (150 - color_x)/150#转向增益PID调节turn_gain_pid.SystemOutput = centerturn_gain_pid.SetStepSignal(0)turn_gain_pid.SetInertiaTime(0.2, 0.1)#将转向增益限制在有效范围内target_value_turn_gain = 0.15 + abs(turn_gain_pid.SystemOutput)if target_value_turn_gain < 0:target_value_turn_gain = 0elif target_value_turn_gain > 2:target_value_turn_gain = 2#将输出电机速度保持在有效行驶范围内target_value_speedl = speed_widget.value - target_value_turn_gain * centertarget_value_speedr = speed_widget.value + target_value_turn_gain * centerif target_value_speedl<0.3:target_value_speedl=0elif target_value_speedl>1:target_value_speedl = 1if target_value_speedr<0.3:target_value_speedr=0elif target_value_speedr>1:target_value_speedr = 1#设置马达速度robot.set_motors(target_value_speedl, target_value_speedr)# 没有检测到目标else:robot.stop()# 更新图像显示至小部件image_widget.value = bgr8_to_jpeg(frame)
这里是关键部分,检测目标(这里是红颜色),然后通过其检测的位置来控制左右马达的速度,驱动无人车的行驶与转弯,后台通过图像部件来显示无人车的跟踪情况,方便看到无人车在整个行驶过程中的各种状态。
3、调用并执行
execute({'new': camera.value})
camera.unobserve_all()
camera.observe(execute, names='value')这里就是前面介绍的,通过调用observer方法来更新摄像头的数据,使用的是一个上面定义的execute的一个回调方法。
4、停止无人车
import time
camera.unobserve_all()
time.sleep(1.0)
robot.stop()5、倒车
前面介绍的是向前行驶和转弯,还缺少一个能倒车的功能,恩,很简单,调用backward函数即可
robot.backward(0.8)
time.sleep(0.5)
robot.stop()6、调节颜色数组
我这里是用红色的胶带粘贴在地板上,所以使用的是红色的数组,当然这里我们可以显示mask来测试颜色数组是否设置的比较恰当,代码如下
from matplotlib import pyplot as plt
%matplotlib inline
from IPython import displayfor i in range(10):frame = camera.valueframe = cv2.resize(frame, (300, 300))frame_=cv2.GaussianBlur(frame,(5,5),0) hsv=cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)mask=cv2.inRange(hsv,color_lower,color_upper) # 颜色数组的取值范围mask=cv2.erode(mask,None,iterations=2)mask=cv2.dilate(mask,None,iterations=2)mask=cv2.GaussianBlur(mask,(3,3),0) plt.imshow(mask)plt.show()#display.clear_output(wait=True)这里我将display.clear_output(wait=True)注释,将会连续生成10张图片,全部在Jupyter中展示出来。我们也可以去掉注释,这样每次的生成将会清除上一次的图片,这样便于更好地观察。10张连续图片也做成了动图便于大家了解:
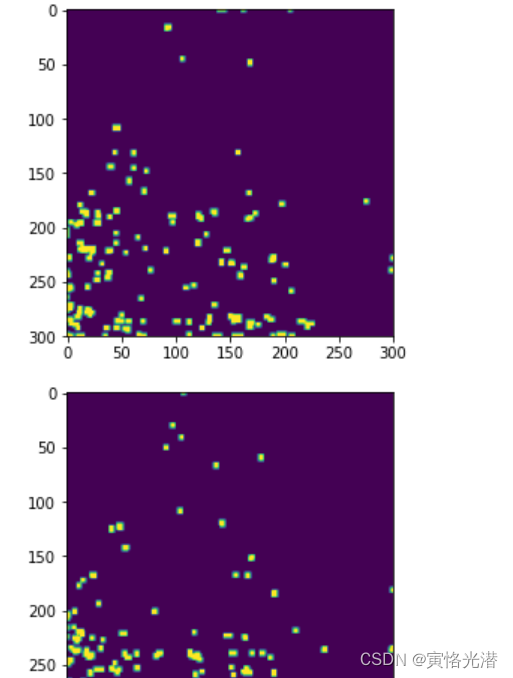
如果这里没有出现mask或者比较少的情况,就需要调节颜色数组,让其更好地匹配线路。
7、模拟方向盘
有些时候不想要自动驾驶来控制,而且很多场景更需要人来远程控制,比如在矿山等危险地方,最好的方法就是能够远程去控制工程车去进行作业。
有了上面的向前向后和转弯的了解后,我们就可以制作一个模拟方向盘来控制无人车了。
7.1、按钮部件
# 创建按钮
button_layout = widgets.Layout(width='100px', height='80px', align_self='center')
stop_button = widgets.Button(description='停止', button_style='danger', layout=button_layout)
forward_button = widgets.Button(description='向前', layout=button_layout)
backward_button = widgets.Button(description='向后', layout=button_layout)
left_button = widgets.Button(description='向左', layout=button_layout)
right_button = widgets.Button(description='向右', layout=button_layout)# 显示按钮
middle_box = widgets.HBox([left_button, stop_button, right_button], layout=widgets.Layout(align_self='center'))
controls_box = widgets.VBox([forward_button, middle_box, backward_button])
display(controls_box)如图:
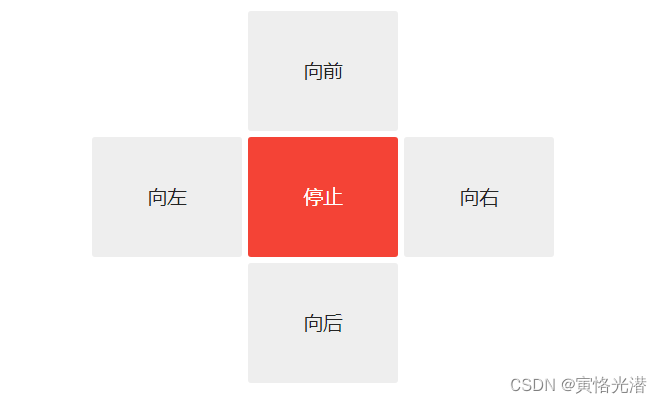
方向盘的布局,通过widgets.Layout创建层,在这个上面通过widgets.Button创建按钮,然后将按钮通过widgets.HBox和widgets.VBox进行横向和垂直的排版即可。Horizontal:水平的,横向。Vertical:垂直的
7.2、方向控制方法
def stop(change):robot.stop()def step_forward(change):robot.forward(0.8)time.sleep(0.5)robot.stop()def step_backward(change):robot.backward(0.8)time.sleep(0.5)robot.stop()def step_left(change):robot.left(0.6)time.sleep(0.5)robot.stop()def step_right(change):robot.right(0.6)time.sleep(0.5)robot.stop()前后左右加停止按钮的方法,方法体很简单,就是控制左右马达的速度。
7.3、按钮动作
定义好了各自方法之后,只需要将方法绑定到各自的按钮就可以了。
stop_button.on_click(stop)
forward_button.on_click(step_forward)
backward_button.on_click(step_backward)
left_button.on_click(step_left)
right_button.on_click(step_right)这样就可以点击按钮,远程控制无人车了。
8、心跳开关
最后就是介绍下心跳开关,检测无人车与浏览器的连接是否还存在的一种简单方法。可以通过下面显示的滑块调整心跳周期(以秒为单位),如果两次心跳之内不能在浏览器之间往返通信的,那么心跳的status(状态)属性值将会设置为dead,一旦连接恢复连接,status属性将设置为alive
from jetbotmini import Heartbeatheartbeat = Heartbeat()# 这个函数将在心跳状态改变时被调用
def handle_heartbeat_status(change):if change['new'] == Heartbeat.Status.dead:robot.stop()heartbeat.observe(handle_heartbeat_status, names='status')period_slider = widgets.FloatSlider(description='period', min=0.001, max=0.5, step=0.01, value=0.5)
traitlets.dlink((period_slider, 'value'), (heartbeat, 'period'))display(period_slider, heartbeat.pulseout)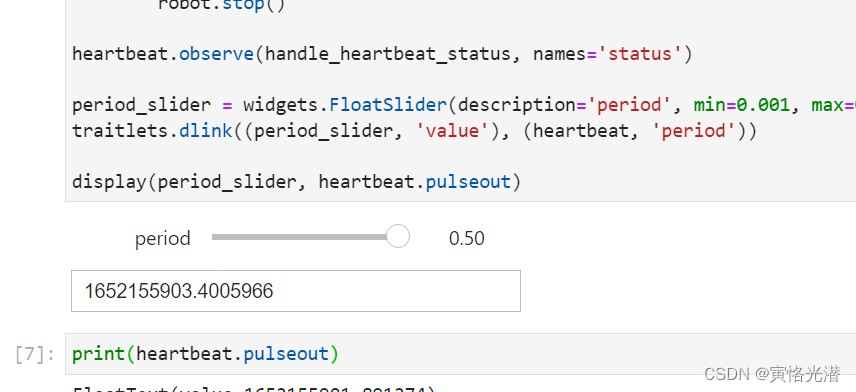
自动驾驶的相关知识点介绍完毕,有错误之处,请指正,一起学习与进步!
相关文章:
无人车沿着指定线路自动驾驶与远程控制的实践应用
有了前面颜色识别跟踪的基础之后,我们就可以设定颜色路径,让无人车沿着指定线路做自动驾驶了,视频:PID控制无人车自动驾驶 有了前几章的知识铺垫,就比较简单了,也是属于颜色识别的一种应用,主要…...
C++ 多态性——纯虚函数与抽象类
抽象类是一种特殊的类,它为一个类族提供统一的操作界面。抽象类是为了抽象和设计的目的而建立的。可以说,建立抽象类,就是为了通过它多态地使用其中的成员函数。抽象类处于类层次的上层,一个抽象类自身无法实例化,也就…...

小程序如何使用防抖和节流?
防抖(Debounce)和节流(Throttle)都是用来优化函数执行频率的技术,特别在处理用户输入、滚动等频繁触发的情况下,它们可以有效减少函数的执行次数,从而提升性能和用户体验。但它们的工作方式和应…...

计算机三级网络技术(持续更新)
BGP考点 A S:自治系统 BGP: Border Gateway Protocol(当前使用的版本是 BGP-4)外部网关协议 动态路由协议可以按照工作范围分为IGP以及EGP。IGP工作在同一个AS内,主要用来发现和计算路由,为AS内提供路由信息的交换&…...
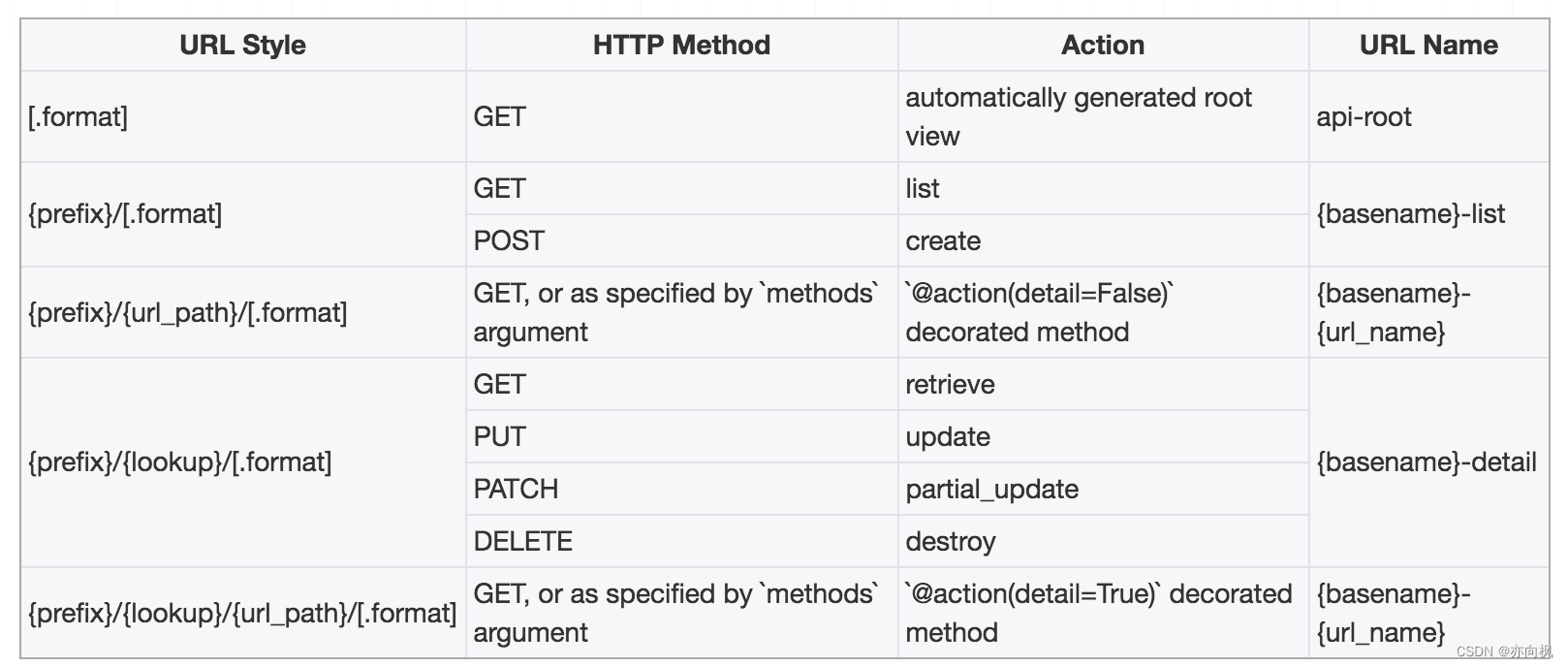
Django Rest_Framework(二)
文章目录 1. http请求响应1.1. 请求与响应1.1.1 Request1.1.1.1 常用属性1).data2).query_params3)request._request 基本使用 1.1.2 Response1.1.2.1 构造方式1.1.2.2 response对象的属性1).data2).status_code3&…...

Kotlin~Visitor访问者模式
概念 将数据结构和操作分离,使操作集合可以独立于数据结构变化。 角色介绍 Visitor:抽象访问者,为对象结构每个具体元素类声明一个访问操作。Element:抽象元素,定义一个accept方法ConcreteElement:具体元…...
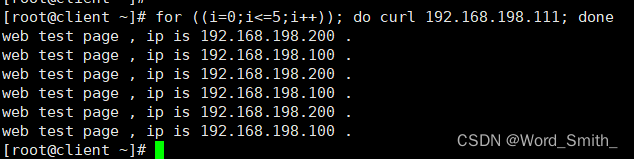
LVS-DR模式集群构建过程演示
一、工作原理 LVS的工作原理 1.当用户向负载均衡调度器(Director Server)发起请求,调度器将请求发往至内核空间 2.PREROUTING链首先会接收到用户请求,判断目标IP确定是本机IP,将数据包发往INPUT链 3.IPVS是工作在IN…...
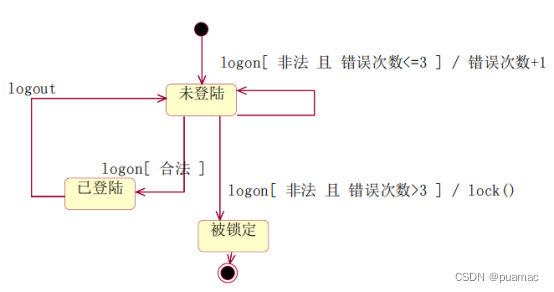
UML-A 卷-知识考卷
UML-A 卷-知识考卷 UML有多少种图,请列出每种图的名字: 常用的几种UML图: 类图(Class Diagram):类图是描述类、接口、关联关系和继承关系的图形化表示。它展示了系统中各个类之间的静态结构和关系。时序…...

BpBinder与PPBinder调用过程——Android开发Binder IPC通信技术
在Android系统中,进程间通信(IPC)是一个非常重要的话题。Android系统通过Binder IPC机制实现进程间通信,而Binder IPC通信技术则是Android系统中最为重要的进程间通信技术之一。本文将介绍Binder IPC通信技术的原理,并…...

篇十五:模板方法模式:固定算法的步骤
篇十五:"模板方法模式:固定算法的步骤" 设计模式是软件开发中的重要知识,模板方法模式(Template Method Pattern)是一种行为型设计模式,用于定义一个算法的骨架,将算法中一些步骤的具…...
web-ssrf
目录 ssrf介绍 以pikachu靶场为例 curl 访问外网链接 利用file协议查看本地文件 利用dict协议扫描内网主机开放端口 file_get_content 利用file协议查看本地文件: fsockopen() 防御方式: ssrf介绍 服务器端请求伪造,是一种由攻击者构造形成…...
)
【HarmonyOS】【续集】实现从视频提取音频并保存到pcm文件功能(API6 Java)
【关键字】 视频提取类Extractor、视频编解码、保存pcm文件、getAudioTime 【背景和问题】 上篇中介绍了从视频提取音频并保存到pcm文件功能,请参考文档:https://developer.huawei.com/consumer/cn/forum/topic/0209125665541017202?fid0101591351254…...

MySQL为什么要使用 B+Tree 作为索引结构?
MySQL为什么要使用 BTree 作为索引结构? 基本情况 常规的数据库存储引擎 ,一般都是采用 B 树或者 B树来实现索引的存储。B树是一种多路平衡树,用这种存储结构来存储大量数据,它的整个高度 会相比二叉树来说 ,会矮很多…...

Three.js阴影
目录 Three.js入门 Three.js光源 Three.js阴影 使用灯光后,场景中就会产生阴影。物体的背面确实在黑暗中,这称为核心阴影(core shadow)。我们缺少的是落下的阴影(drop shadow),即对象在其他…...

VSCode Remote-SSH (Windows)
1. VSCode 安装 VSCode 2. 安装扩展 Remote SSH Getting started Follow the step-by-step tutorial or if you have a simple SSH host setup, connect to it as follows: Press F1 and run the Remote-SSH: Open SSH Host… command.Enter your user and host/IP in the …...

现代C++中的从头开始深度学习【1/8】:基础知识
一、说明 提及机器学习框架与研究和工业的相关性。现在很少有项目不使用Google TensorFlow或Meta PyTorch,在于它们的可扩展性和灵活性。也就是说,花时间从头开始编码机器学习算法似乎违反直觉,即没有任何基本框架。然而,事实并非…...
Jwt(Json web token)——使用token的权限验证方法 用户+角色+权限表设计 SpringBoot项目应用
目录 引出使用token的权限验证方法流程 用户、角色、权限表设计权限表角色表角色-权限关联表用户表查询用户的权限(四表联查)数据库的视图 项目中的应用自定义注解拦截器controller层DTO返回给前端枚举类型的json化日期json问题 实体类-DAO 总结 引出 1.…...

SpringWeb项目核心功能总结
SpringWeb项目核心功能总结 文章目录 SpringWeb项目核心功能总结1.浏览器与Java程序的连接(个人偏好使用RequestMapping)2.参数的传入3.结果的返回请求转发和请求重定向的区别 核心功能用到的注解: RestControllerControllerResponseBodyRequ…...

Django------信号
Django 框架包含了一个信号机制,它允许若干个发送者(sender)通知一组接收者(receiver)某些特定操作或事件(events)已经发生了, 接收者收到指令信号(signals)后再去执行特定的操作。本文主要讲解Django信号(…...

HTML5 中新增了哪些表单元素?
聚沙成塔每天进步一点点 ⭐ 专栏简介⭐ HTML5 中新增了的表单元素⭐ 写在最后 ⭐ 专栏简介 前端入门之旅:探索Web开发的奇妙世界 记得点击上方或者右侧链接订阅本专栏哦 几何带你启航前端之旅 欢迎来到前端入门之旅!这个专栏是为那些对Web开发感兴趣、刚…...

MongoDB学习和应用(高效的非关系型数据库)
一丶 MongoDB简介 对于社交类软件的功能,我们需要对它的功能特点进行分析: 数据量会随着用户数增大而增大读多写少价值较低非好友看不到其动态信息地理位置的查询… 针对以上特点进行分析各大存储工具: mysql:关系型数据库&am…...

新能源汽车智慧充电桩管理方案:新能源充电桩散热问题及消防安全监管方案
随着新能源汽车的快速普及,充电桩作为核心配套设施,其安全性与可靠性备受关注。然而,在高温、高负荷运行环境下,充电桩的散热问题与消防安全隐患日益凸显,成为制约行业发展的关键瓶颈。 如何通过智慧化管理手段优化散…...

Java求职者面试指南:Spring、Spring Boot、MyBatis框架与计算机基础问题解析
Java求职者面试指南:Spring、Spring Boot、MyBatis框架与计算机基础问题解析 一、第一轮提问(基础概念问题) 1. 请解释Spring框架的核心容器是什么?它在Spring中起到什么作用? Spring框架的核心容器是IoC容器&#…...

【Go语言基础【12】】指针:声明、取地址、解引用
文章目录 零、概述:指针 vs. 引用(类比其他语言)一、指针基础概念二、指针声明与初始化三、指针操作符1. &:取地址(拿到内存地址)2. *:解引用(拿到值) 四、空指针&am…...
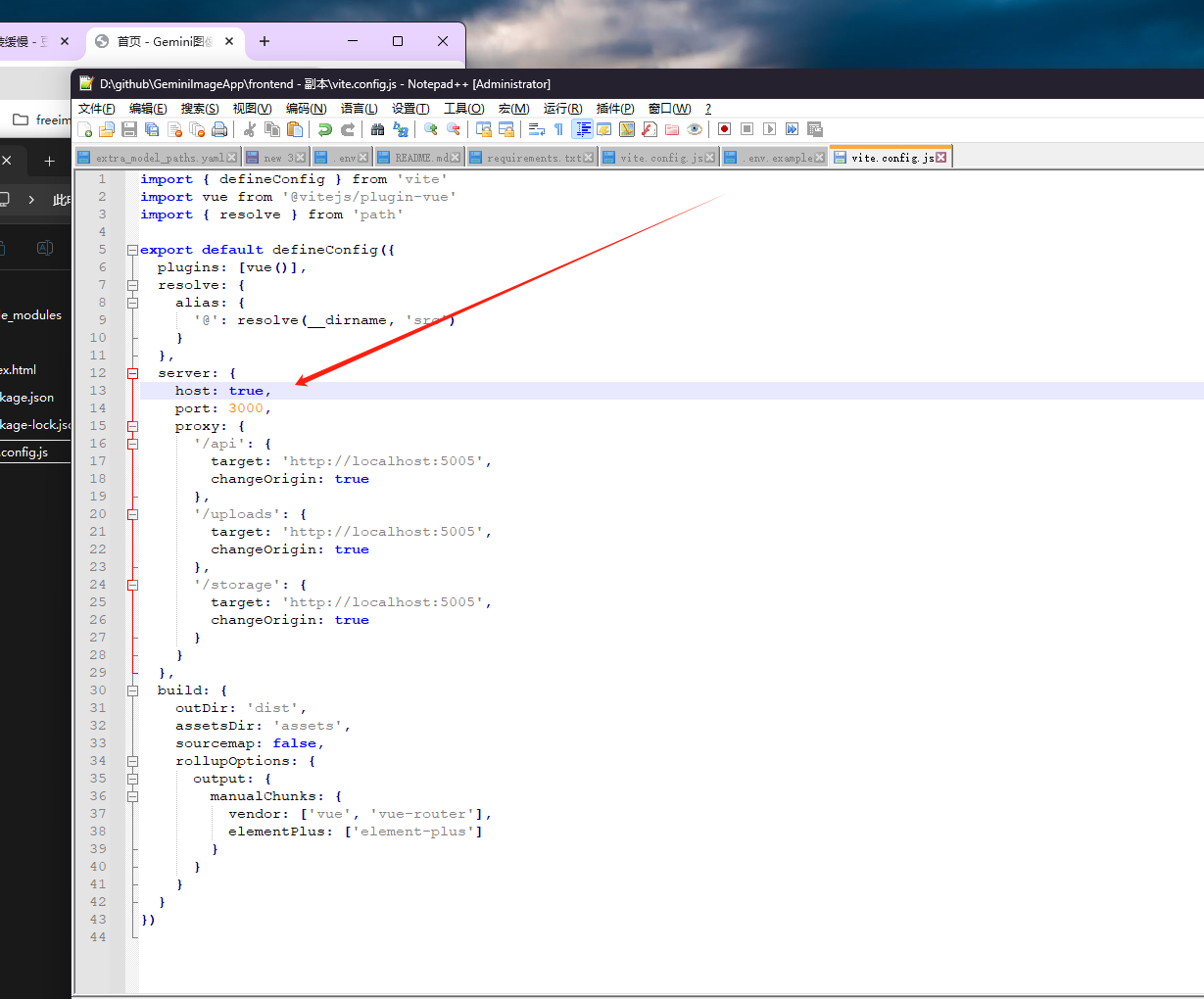
推荐 github 项目:GeminiImageApp(图片生成方向,可以做一定的素材)
推荐 github 项目:GeminiImageApp(图片生成方向,可以做一定的素材) 这个项目能干嘛? 使用 gemini 2.0 的 api 和 google 其他的 api 来做衍生处理 简化和优化了文生图和图生图的行为(我的最主要) 并且有一些目标检测和切割(我用不到) 视频和 imagefx 因为没 a…...

Redis:现代应用开发的高效内存数据存储利器
一、Redis的起源与发展 Redis最初由意大利程序员Salvatore Sanfilippo在2009年开发,其初衷是为了满足他自己的一个项目需求,即需要一个高性能的键值存储系统来解决传统数据库在高并发场景下的性能瓶颈。随着项目的开源,Redis凭借其简单易用、…...
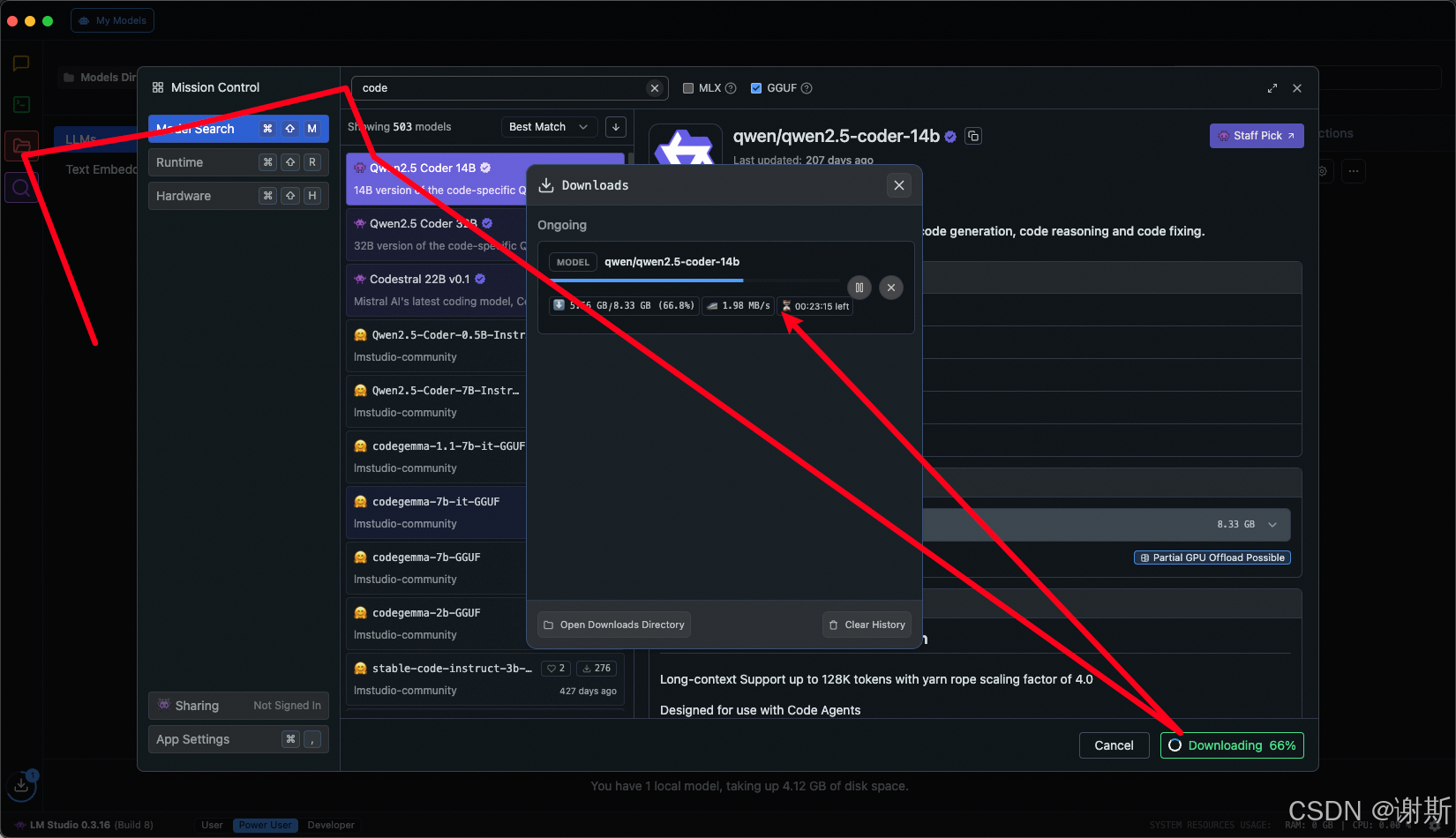
[大语言模型]在个人电脑上部署ollama 并进行管理,最后配置AI程序开发助手.
ollama官网: 下载 https://ollama.com/ 安装 查看可以使用的模型 https://ollama.com/search 例如 https://ollama.com/library/deepseek-r1/tags # deepseek-r1:7bollama pull deepseek-r1:7b改token数量为409622 16384 ollama命令说明 ollama serve #:…...
)
uniapp 集成腾讯云 IM 富媒体消息(地理位置/文件)
UniApp 集成腾讯云 IM 富媒体消息全攻略(地理位置/文件) 一、功能实现原理 腾讯云 IM 通过 消息扩展机制 支持富媒体类型,核心实现方式: 标准消息类型:直接使用 SDK 内置类型(文件、图片等)自…...
Java设计模式:责任链模式
一、什么是责任链模式? 责任链模式(Chain of Responsibility Pattern) 是一种 行为型设计模式,它通过将请求沿着一条处理链传递,直到某个对象处理它为止。这种模式的核心思想是 解耦请求的发送者和接收者,…...
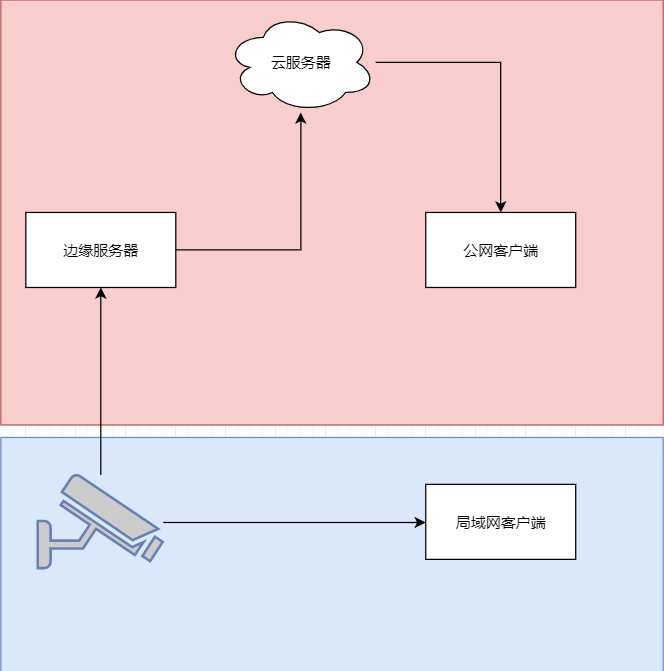
java 局域网 rtsp 取流 WebSocket 推送到前端显示 低延迟
众所周知 摄像头取流推流显示前端延迟大 传统方法是服务器取摄像头的rtsp流 然后客户端连服务器 中转多了,延迟一定不小。 假设相机没有专网 公网 1相机自带推流 直接推送到云服务器 然后客户端拉去 2相机只有rtsp ,边缘服务器拉流推送到云服务器 …...