NeRF基础代码解析
embedders
对position和view direction做embedding。
class FreqEmbedder(nn.Module):def __init__(self, in_dim=3, multi_res=10, use_log_bands=True, include_input=True):super().__init__()self.in_dim = in_dimself.num_freqs = multi_resself.max_freq_log2 = multi_resself.use_log_bands = use_log_bandsself.periodic_fns = [torch.sin, torch.cos]self.include_input = include_inputself.embed_fns = Noneself.out_dim = Noneself.num_embed_fns = Noneself.create_embedding_fn()def create_embedding_fn(self):self.embed_fns = []# 10 * 2 * 3 = 60self.out_dim = self.num_freqs * len(self.periodic_fns) * self.in_dim)if self.include_input:self.embed_fns.append(lambda x: x)self.out_dim += self.in_dim # 63if self.use_log_lands:freq_bands = 2. ** torch.linspace(0., self.max_freq_log2, steps=self.num_freqs)else:freq_bands = torch.linspace(2.**0, 2.**self.max_freq_log2, steps=self.num_freqs)for freq in freq_bands:for p_fn in self.periodic_fns:self.embed_fns.append(lambda x, p_fn=p_fn, freq=freq: p_fn(x*freq))self.num_embed_fns = len(self.embed_fns)def forward(self, x):"""x: [..., in_dim], xyz or view direction.embedding: [..., out_dim], corresponding frequency encoding."""embed_lst = [embed_fn(x) for embed_fn in self.embed_fns]# [[x, sin(x), cos(x), sin(2x), cos(2x),...,sin(512x), cos(512x)]]embedding = torch.cat(embed_lst, dim=-1)return embedding
NeRFBackbone
position和view经过embedding后,得到特征向量。再输入到NeRFBackbone网络中,得到sigma和color输出。
class NeRFBackbone(nn.Module):def __init__(self, pos_dim=3, cond_dim=64, view_dim=3, hid_dim=128, num_density_linears=8, num_color_linears=3, skip_layer_indices=[4]):self.pos_dim = pos_dimself.cond_dim = cond_dimself.view_dim = view_dimself.hid_dim = hid_dimself.out_dim = 4 # rgb + sigmaself.num_density_linears = num_density_linearsself.num_color_linears = num_color_linearsself.skip_layer_indices = skip_layer_indicesdensity_input_dim = pos_dim + cond_dimself.density_linears = nn.ModuleList([nn.Linear(density_input_dim, hid_dim)] +[nn.Linear(hid_dim, hid_dim) if i not in self.skip_layer_indices else nn.Linear(hid_dim + density_input_dim, hid_dim) for i in range(num_density_linears - 1)])self.density_out_linear = nn.Linear(hid_dim, 1)color_input_dim = view_dim + hid_dimself.color_linears = nn.ModuleList([nn.Linear(color_input_dim, hid_dim//2)] +[nn.Linear(hid_dim//2, hid_dim//2) for _ in range(num_color_linears - 1)])self.color_out_linear = nn.Linear(hid_dim//2, 3)def forward(self, pos, view, view):"""pos: [bs, n_sample, pos_dim], encoding of position.cond: [cond_dim,], condition features.view: [bs, view_dim], encoding of view direction."""bs, n_sample, _ = pos.shapeif cond.dim == 1: # [cond_dim]cond = cond.squeeze()[None, None, :].expand([bs, n_sample, self.cond_dim])elif cond_dim == 2: # [batch, cond_dim]cond = cond[:, None, :].expand([bs, n_sample, self.cond_dim])view = view[:, None, :].expand([bs, n_sample, self.view_dim])density_linear_input = torch.cat([pos, cond], dim=-1)h = density_linear_inputfor i in range(len(self.density_linears)):h = self.density_linears[i](h)h = F.relu(h)if i in self.skip_layer_indices:h = torch.cat([density_linear_input, h], -1)sigma = self.density_out_linear(h)h = torch.cat([h, view], -1)for i in range(len(self.color_linears)):h = self.color_linears[i](h)h = F.relu(h)rgb = self.color_out_linear(h)outputs = torch.cat([rgb, sigma], -1)return outputs
Ray Sampler
一张图的height = 1280, width = 720, 对这张图采样4096条从相机原点发出的光线ray。
def get_rays(H, W, focal, c2w, cx=None, cy=None):"""Get the rays emitted from camera to all pixels.The ray is represented in world coordinate.input:H: height of the image in pixel.W: width of the image in pixel.focal: focal length of the camera in pixel.c2w: 3x4 camera-to-world matrix, it should be something like this:[[r11, r12, r13, t1],[r21, r22, r23, t2],[r31, r32, r33, t3]]cx: center of camera in width axis.cy: center of camera in height axis.return:rays_o: start point of the ray.rays_d: direction of the ray. so you can sample the point in the ray with: xyz = rays_o + rays_d * z_val, where z_val is the distance."""j_pixels, i_pixels = torch.meshgrid(torch.linspace(0, H-1, H), torch.linspace(0, W-1, W))if cx is None:cx = W * 0.5if cy is None:cy = H * 0.5directions = torch.stack([(i_pixels - cx)/focal, -(j_pixels - cy)/focal, -torch.ones_like(i_pixels)], dim=-1) # [W, H, 3]# Rotate ray directions from camera to the world frame.rays_d = torch.sum(directions[..., None, :] * c2w[:3, :3], dim=-1)# origin point of all ray, camera center in world coodinate.rays_o = c2w[:3, -1].expand(rays_d.shape)return rays_o, rays_dclass BaseRaySampler:def __init__(self, N_rays):super(BaseRaySampler, self).__init__()self.N_rays = N_raysdef __call__(self, H, W, focal, c2w):rays_o, rays_d = get_rays(H, W, focal, c2w)selected_coords = self.sample_rays(H, W)rays_o = rays_o[select_coords[:, 0], select_coords[:, 1]] # [N_rand, 3]rays_d = rays_d[select_coords[:, 0], select_coords[:, 1]] # [N_rand, 3]return rays_o, rays_d, select_coordsdef sample_rays(self, H, W, **kwargs):raise NotImplementedErrorclass UniformRaySampler(BaseRaySampler):def __init__(self, N_rays=None):super().__init__(N_rays=N_rays)def sample_ray(self, H, W, n_rays=None, rect=None, in_rect_percent=0.9, **kwargs):if n_rays is None:n_rays = self.N_rayscoords = torch.stack(torch.meshgrid(torch.linspace(0, H-1, H), torch.linspace(0, W-1, W)), -1) # [H, W, 2]coords = torch.reshape(coords, [-1, 2]) # [H * W, 2]if rect is None:# uniformly sample the whole imageselected_inds = np.random.choice(coords.shape[0], size=[n_rays], replace=False)selected_coords = coords[selected_inds].long()else:# uniformly sample from rect region and out-rect, respectively.......return seleced_coordsdef __call__(self, H, W, focal, c2w, n_rays=None, selected_coords=None, rect=None, in_rect_percent=0.9, **kwargs):rays_o, rays_d = get_rays(H, W, focal, c2w)if select_coords s None:select_coords = self.sample_rays(H, W, n_rays, rect, in_rect_percent)rays_o = rays_o[selected_coords[:, 0], selected_coords[:, 1]]rays_d = rays_d[selected_coords[:, 0], selected_coords[:, 1]]return rays_o, rays_d, selected_coordsdef sample_pixels_from_img_with_select_coords(self, img, select_coords):return img[selected_coords[:, 0], select_coords[:, 1]]
相关文章:

NeRF基础代码解析
embedders 对position和view direction做embedding。 class FreqEmbedder(nn.Module):def __init__(self, in_dim3, multi_res10, use_log_bandsTrue, include_inputTrue):super().__init__()self.in_dim in_dimself.num_freqs multi_resself.max_freq_log2 multi_resself…...
职场新星:Java面试干货让你笑傲求职路(三)
职场新星:Java面试干货让你笑傲求职路 1、token 为什么存放在 redis 中?2、索引的底层原理是什么?3、Spring IOC和AOP的原理4、接口和抽象类有什么共同点和区别?5、为什么要使用线程池?直接new个线程不好吗?…...

获取指定收获地址的信息
目录 1 /// 获取指定收获地址的信息 2 /// 删除指定的收获地址信息 3 /// 取消订单 4 /// 确认订单收货 /// <summary> /// 获取指定收获地址的信息</...
突破笔试:力扣全排列(medium)
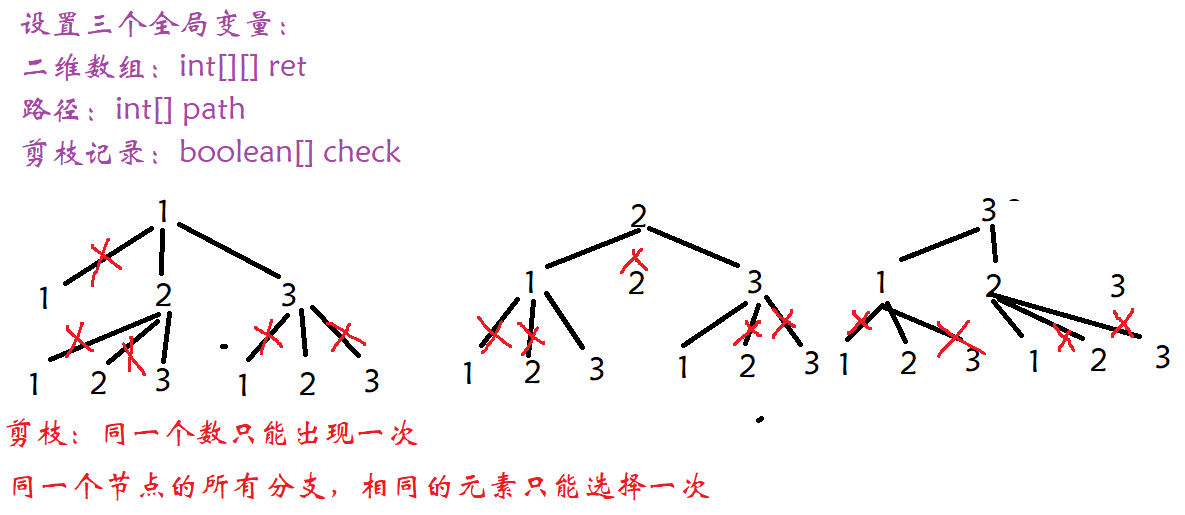
1. 题目链接:46. 全排列 2. 题目描述:给定一个不含重复数字的数组 nums ,返回其 所有可能的全排列 。你可以 按任意顺序 返回答案。 示例 1: 输入:nums [1,2,3] 输出:[[1,2,3],[1,3,2],[2,1,3],[2,3,1],[…...
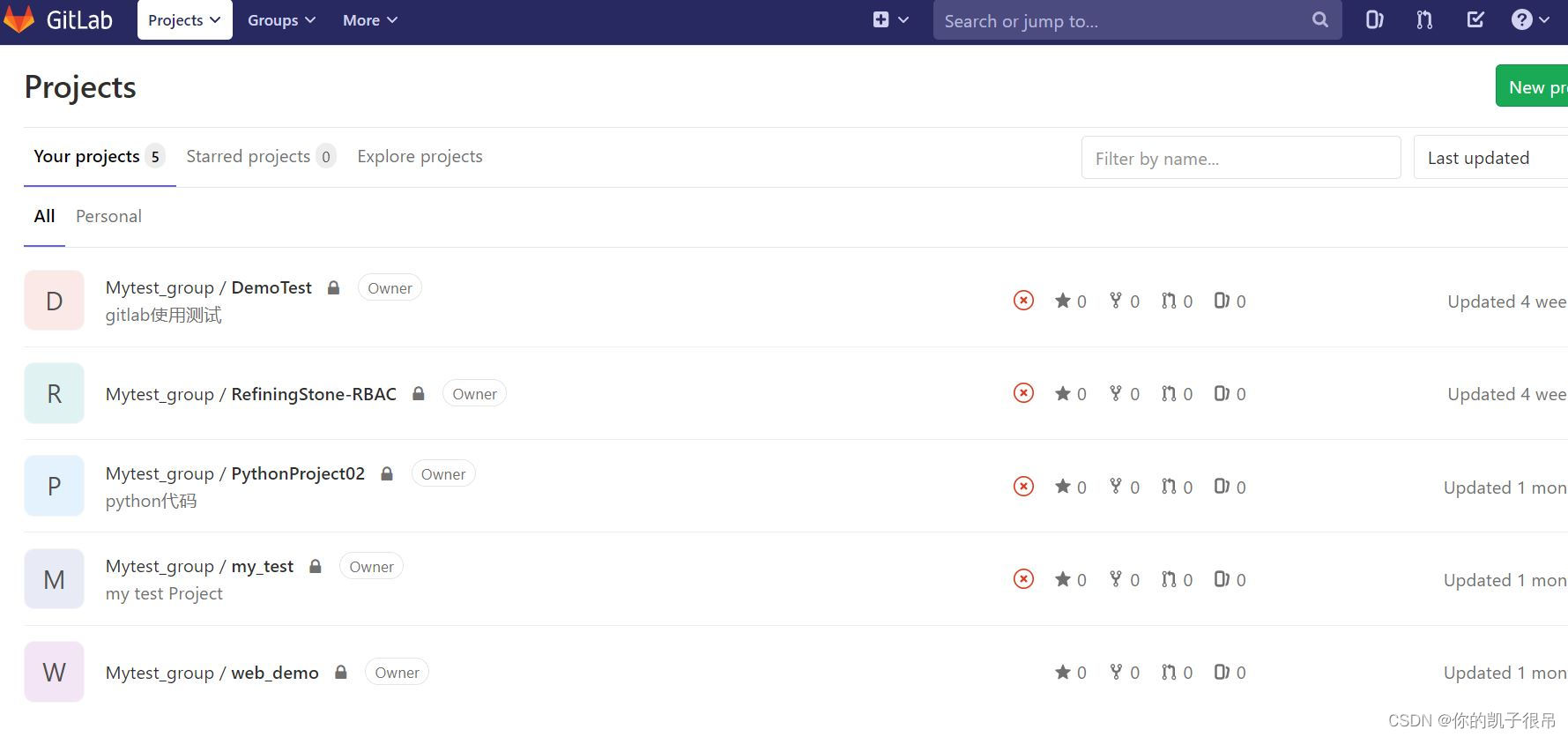
gitlab 503 错误的解决方案
首先使用 sudo gitlab-ctl status 命令查看哪些服务没用启动 sudo gitlab-ctl status 再用 gitlab-rake gitlab:check 命令检查 gitlab。根据发生的错误一步一步纠正。 gitlab-rake gitlab:check 查看日志 tail /var/log/gitlab/gitaly/current删除gitaly.pid rm /var/opt…...

智能离子风棒联网监控静电消除器的主要功能和特点
智能离子风棒联网监控静电消除器是一种集成了智能化和网络化监控功能的设备,用于监测和消除静电现象。它的工作原理是通过产生大量的正负离子,将空气中的静电中和和消除,从而达到防止静电积累和放电的目的。 智能离子风棒联网监控静电消除器的…...
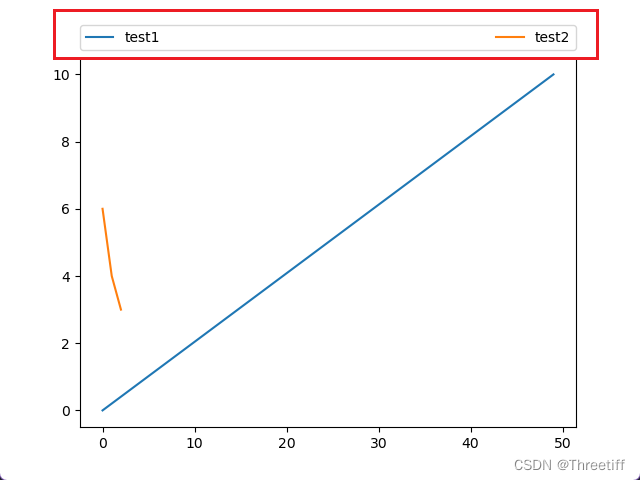
matplotlib 设置legend的位置在轴最上方,长度与图的长度相同
import matplotlib.pyplot as plt import numpy as npx1 np.linspace(0, 10, 50) x2 [6,4,3]ax plt.subplot() ax.plot(x1, label"test1") ax.plot(x2, label"test2") # 设置图例的位置 # 将左下角放置在【0, 1.02】位置处,横为1,…...

Docker-Compose 安装rabbitmq
【编写:docker-compose-rabbitmq.yml】创建数据目录: mkdir -p /opt/rabbitmq/data cd /opt/rabbitmq# 创建 docker-compose-rabbitmq.yml vim docker-compose-rabbitmq.yml 输入: version: "3.1" services:rabbitmq:image: rabbit…...

leetcode357- 2812. 找出最安全路径
这个题比较经典,可以用多个算法来求解,分别给出各个算法的求解方法,主要是分为第一部分的多源BFS求每个位置的距离和第二部分求(0,0)到(n-1,n-1)的最短路径(可以用多种方法求) 目录 多源BFS求最短路径枚举安全系数判断…...
Oracle连接数据库提示 ORA-12638:身份证明检索失败
ORA-12638 是一个 Oracle 数据库的错误代码,它表示身份验证(认证)检索失败。这通常与数据库连接相关,可能由于以下几个原因之一引起: 错误的用户名或密码: 提供的数据库用户名或密码不正确,导致…...

在 Linux 中使用 systemd 注册服务
Systemd 是一种现代的 Linux 系统初始化系统和服务管理器。它旨在管理系统服务的初始化、配置和控制。Systemd 的一个关键特性是它可以管理服务,这些服务是为系统提供特定功能的后台进程。在本指南中,我们将探讨如何使用 systemd 在 Linux 中注册服务。 …...

(03)Unity HTC VRTK 基于 URP 开发记录
1.简介 本篇主要内容为:URP如何与VRTK结合、URP需要注意的地方、VRTK的功能进行阐述。 因项目本身要求要渲染出比较好的画质,所以抛弃了Unity默认渲染管线Built-in,使用URP进行渲染,当然也可以选HDRP,但考虑到后期项目…...
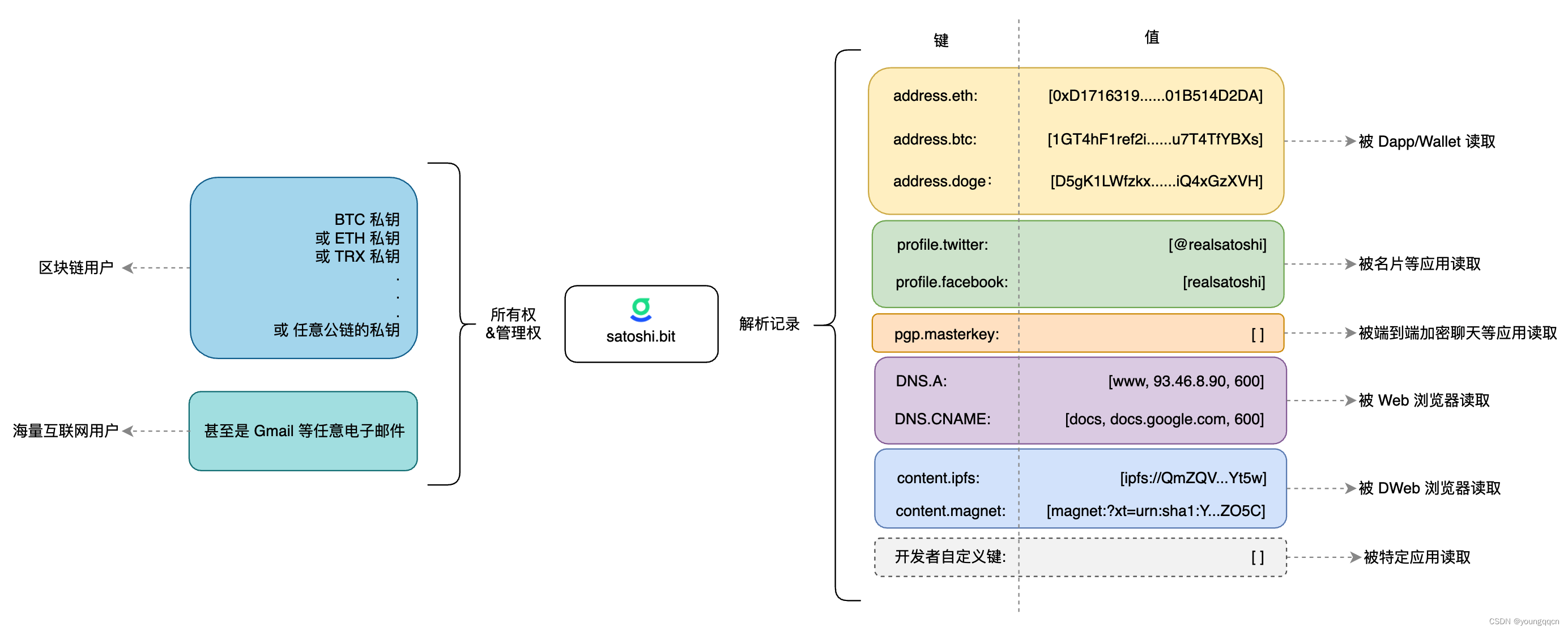
.bit域名调研
.bit域名研究 问题: .bit域名和ENS域名的相同点?不同点?有什么关系? .bit的定义 .bit 是基于区块链的,开源的,跨链去中心化账户系统.bit 提供了以 .bit 为后缀的全局唯一的命名体系,可用于加密…...

Vue数组变更方法和替换方法
一、可以引起UI界面变化 Vue 将被侦听的数组的变更方法进行了包裹,所以它们也将会触发视图更新。这些被包裹过的方法包括: push()pop()shift()unshift()splice()sort()reverse() 以上七个数组都会改变原数组,下面来分别讲解它们的区别&…...

Centos-6.3安装使用MongoDB
安装说明 系统环境:Centos-6.3 安装软件:mongodb-linux-x86_64-2.2.2.tgz 下载地址:http://www.mongodb.org/downloads 安装机器:192.168.15.237 上传位置:/usr/local/ 软件安装位置:/usr/local/mongodb 数…...

Mysql 复杂查询丨联表查询
💗wei_shuo的个人主页 💫wei_shuo的学习社区 🌐Hello World ! JOIN(联表查询) 联表查询(Join)是一种在数据库中使用多个表进行关联查询的操作。它通过使用 JOIN 关键字将多个表连接在…...
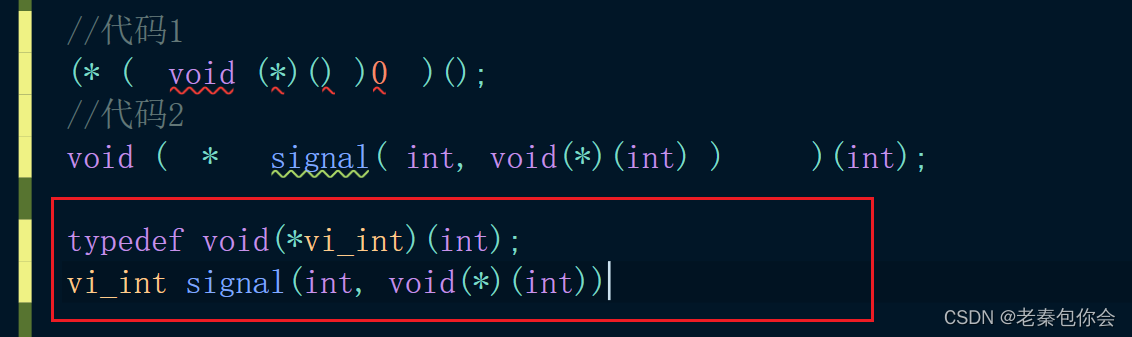
C语言进阶第二课-----------指针的进阶----------升级版
作者前言 🎂 ✨✨✨✨✨✨🍧🍧🍧🍧🍧🍧🍧🎂 🎂 作者介绍: 🎂🎂 🎂 🎉🎉🎉…...

若依vue -【 111 ~ 更 ~ 127 完 】
【更】111 3.5.0版本更新介绍 112 使用docker实现一键部署 1、安装docker yum install https://download.docker.com/linux/fedora/30/x86_64/stable/Packages/containerd.io-1.2.6-3.3.fc30.x86_64.rpm yum install -y yum-utils device-mapper-persistent-data lvm2 yum-c…...
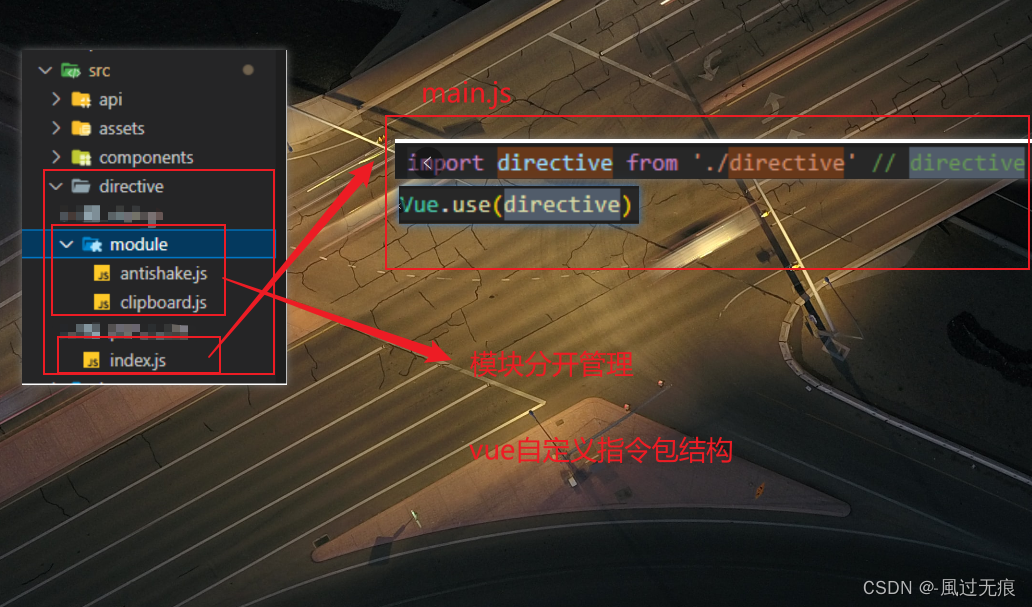
vue-pc端实现按钮防抖处理-自定义指令
前言 我们经常在移动端会处理按钮和输入框的防抖和节流处理,在pc端很少进行这样的操作 但是在pc端也是可以进行按钮的防抖操作,这样也是比较合理,可以不用但不可以不会 我们只要配合vue项目自定义指令加上全局注册,就可以实现按…...

python解决8皇后问题
def is_valid(queens, row, col):for i in range(row):if queens[i] == col or abs(queens[i] - col) == abs(i - row):return Falsereturn Truedef solve_n_queens(n, row, queens, result):if row == n:result.append(queens[:]) # 将当前解添加到结果中returnfor col in ra…...

Linux I/O 演进史:从管道到零拷贝,一篇串起个服务端核心原语克
前言 在使用 kubectl get $KIND -o yaml 查看 k8s 资源时,输出结果中包含大量由集群自动生成的元数据(如 managedFields、resourceVersion、uid 等)。这些信息在实际复用 yaml 清单时需要手动清理,增加了额外的工作量。 使用 kube…...

Ai2Psd:告别矢量丢失!Illustrator到PSD无损转换的终极解决方案
Ai2Psd:告别矢量丢失!Illustrator到PSD无损转换的终极解决方案 【免费下载链接】ai-to-psd A script for prepare export of vector objects from Adobe Illustrator to Photoshop 项目地址: https://gitcode.com/gh_mirrors/ai/ai-to-psd 还在为…...
)
为什么你的C# 13主构造函数无法单步执行?微软Roslyn团队2024Q2调试协议变更详解(首批实测报告)
第一章:为什么你的C# 13主构造函数无法单步执行?C# 13 引入的主构造函数(Primary Constructor)语法简洁优雅,但调试时却常出现断点失效、F10/F11 无法单步进入等问题。根本原因在于:**主构造函数不生成独立…...

QMCDecode:开源音频解密工具,让数字音乐重获自由
QMCDecode:开源音频解密工具,让数字音乐重获自由 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目录,…...
)
【EI复现】考虑网络动态重构的分布式电源选址定容优化方法(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

Starry Night Art Gallery保姆级教程:BF16精度启用与FP32回退机制
Starry Night Art Gallery保姆级教程:BF16精度启用与FP32回退机制 1. 引言:当艺术创作遇上显存焦虑 想象一下,你正坐在一个数字化的艺术馆里,手握“画笔”,准备创作一幅史诗级的画作。灵感如泉涌,你输入了…...

novelWriter快捷键大全:提高写作效率的终极秘籍
novelWriter快捷键大全:提高写作效率的终极秘籍 【免费下载链接】novelWriter novelWriter is an open source plain text editor designed for writing novels. 项目地址: https://gitcode.com/gh_mirrors/no/novelWriter novelWriter是一款专为小说创作设计…...

告别熬夜肝论文!揭秘百考通AI如何用“双降”黑科技,搞定毕业季全流程难题
摘要:毕业季临近,论文写作如同横在学子面前的“大山”——查重率、AI痕迹、格式规范、文献梳理、数据分析……每一项都令人头大。本文深度解析一款专注于学术科研的智能辅助平台——百考通AI,看它如何运用先进的自然语言处理与深度学习技术&a…...
)
别再手动截图了!用Java POI把商品图片和详情一键导出到Excel(附完整工具类)
电商后台自动化利器:Java POI实现商品图文一键导出Excel实战指南 每次运营同事催你要商品数据报表时,还在手工复制粘贴图片吗?作为经历过这种折磨的开发者,我深知电商系统中商品信息导出的痛点——尤其是当需要将主图、详情图等多…...

2025年大模型算法工程师的思考:技术趋势与职业发展路径
2025年大模型算法工程师的思考:技术趋势与职业发展路径领域大模型的本质 从2024年底DeepSeek"诺曼底登陆"以来,2025年开源和闭源模型迭代速度和开源质量远超以往几年。经常会遇到当T时刻在领域benchmark上优化到SOTA之后,T1时刻有更…...