Ubuntu 连接海康智能相机步骤(亲测,成功读码)
ubuntu20.04下连接海康智能相机
- Ubuntu 连接海康智能相机步骤(亲测,已成功读码)
- 输出的结果
Ubuntu 连接海康智能相机步骤(亲测,已成功读码)
(就是按照海康的提供的步骤和源码连接相机,流水账)
- 安装Ubuntu20.04
- 安装gcc和g++,IDmvs只提供了C代码,所以需要自己make编译,自己去搜下怎么安装。
- 官网下载IDMVS软件,进入海康机器人页面,进入下载选项,,选择客户端下载,第二页,选择里面的IDMVS(linux)
- 解压安装,我是用deb文件安装的,选择X86_64版本。
- 安装完成后,在菜单栏里面有IDMVS图标,可以直接打开,或者进入/opt/IDMVS/bin/,运行./IDMVS.sh,两种方法都能打开客户端。
- 连接相机,如果没有找到相机你可以在windows上先连下相机试试,然后设定固定IP,连接相机
- 连上之后,进入/opt/IDMVS/有个demo的文件夹,具体在哪里忘记了,可以找一下,
- IDMVS只提供了两个demo,进入/GrabImage/目录下,应该只有两个文件,一个GrabImage.c,一个makefile。
- 然后把上级目录下的/sdk/里面的.so文件放到/GrabImage/目录下。
- 然后sudo make(如果你之前装好了g++和gcc,应该可以make成功)
- 执行生成后的文件。./GrabImage,就OK了,选择你想要连接的相机。就能看到获取到的结果了。
以下是GrabImage.c的代码
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <pthread.h>#include <cstdlib>
#include <string>
#include <iconv.h>#include "MvCodeReaderParams.h"
#include "MvCodeReaderErrorDefine.h"
#include "MvCodeReaderCtrl.h"bool g_bExit = false;
// ch:中文转换条码长度定义 | en:Chinese coding format len
#define MAX_BCR_LEN 512// ch:中文编码GB2312格式转换UTF_8 | en: Chinese coding format GB2312 to utf_8
int GB2312ToUTF8(char* szSrc, size_t iSrcLen, char* szDst, size_t iDstLen)
{iconv_t cd = iconv_open("utf-8//IGNORE", "gb2312//IGNORE");if(0 == cd){return -2; }memset(szDst, 0, iDstLen);char **src = &szSrc;char **dst = &szDst;if(-1 == (int)iconv(cd, src, &iSrcLen, dst, &iDstLen)){return -1; }iconv_close(cd);return 0;
}// ch:等待用户输入enter键来结束取流或结束程序
// en:wait for user to input enter to stop grabbing or end the sample program
void PressEnterToExit(void)
{int c;while ( (c = getchar()) != '\n' && c != EOF );fprintf( stderr, "\nPress Enter to exit.\n");while( getchar() != '\n');g_bExit = true;usleep(1);
}// ch:打印设备信息 | en:Print device Info
bool PrintDeviceInfo(MV_CODEREADER_DEVICE_INFO* pstMVDevInfo)
{if (NULL == pstMVDevInfo){printf("The Pointer of pstMVDevInfo is NULL!\r\n");return false;}if (MV_CODEREADER_GIGE_DEVICE == pstMVDevInfo->nTLayerType){int nIp1 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24);int nIp2 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16);int nIp3 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8);int nIp4 = (pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff);// ch:打印当前相机ip和用户自定义名字 | en:print current ip and user defined nameprintf("CurrentIp: %d.%d.%d.%d\r\n" , nIp1, nIp2, nIp3, nIp4);printf("UserDefinedName: %s\r\n\n" , pstMVDevInfo->SpecialInfo.stGigEInfo.chUserDefinedName);}else if (MV_CODEREADER_USB_DEVICE == pstMVDevInfo->nTLayerType){printf("UserDefinedName: %s\r\n\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chUserDefinedName);}else{printf("Not support.\r\n");}return true;
}// ch:获取图像线程 | en:Get Image Thread
static void* GrabImageThread(void* pUser)
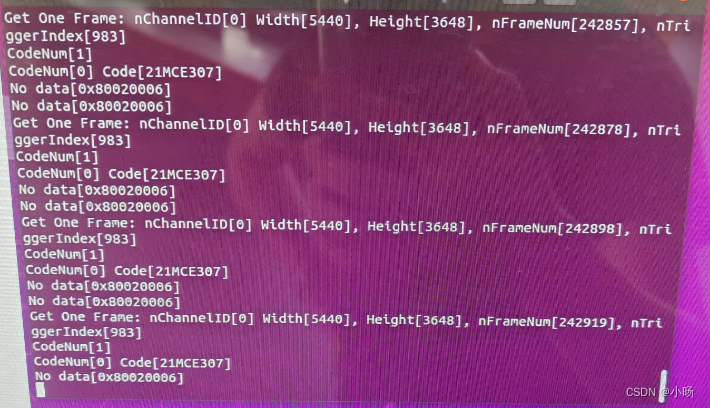
{int nRet = MV_CODEREADER_OK;MV_CODEREADER_IMAGE_OUT_INFO_EX2 stImageInfo = {0};memset(&stImageInfo, 0, sizeof(MV_CODEREADER_IMAGE_OUT_INFO_EX2));unsigned char * pData = NULL;while(1){if (g_bExit){break;}nRet = MV_CODEREADER_GetOneFrameTimeoutEx2(pUser, &pData, &stImageInfo, 1000);if (nRet == MV_CODEREADER_OK){MV_CODEREADER_RESULT_BCR_EX* stBcrResult = (MV_CODEREADER_RESULT_BCR_EX*)stImageInfo.pstCodeListEx;printf("Get One Frame: nChannelID[%d] Width[%d], Height[%d], nFrameNum[%d], nTriggerIndex[%d]\n", stImageInfo.nChannelID, stImageInfo.nWidth, stImageInfo.nHeight, stImageInfo.nFrameNum, stImageInfo.nTriggerIndex);printf("CodeNum[%d]\n", stBcrResult->nCodeNum);char strChar[MAX_BCR_LEN] = {0};for (int i = 0; i < stBcrResult->nCodeNum; i++){memset(strChar, 0, MAX_BCR_LEN);nRet = GB2312ToUTF8(stBcrResult->stBcrInfoEx[i].chCode, strlen(stBcrResult->stBcrInfoEx[i].chCode), strChar, MAX_BCR_LEN);if (nRet == MV_CODEREADER_OK){printf("CodeNum[%d] Code[%s]\r\n", i, strChar);}else{printf("CodeNum[%d] Code[%s]\r\n", i, stBcrResult->stBcrInfoEx[i].chCode);} }}else{printf("No data[0x%x]\r\n", nRet);}}return 0;}// ch:主处理函数 | en:main process
int main()
{int nRet = MV_CODEREADER_OK;void* handle = NULL;bool bIsNormalRun = true;do{MV_CODEREADER_DEVICE_INFO_LIST stDeviceList;memset(&stDeviceList, 0, sizeof(MV_CODEREADER_DEVICE_INFO_LIST));// ch:枚举设备 | Enum devicenRet = MV_CODEREADER_EnumDevices(&stDeviceList, MV_CODEREADER_GIGE_DEVICE);if (MV_CODEREADER_OK != nRet){printf("Enum Devices fail! nRet [%#x]\r\n", nRet);break;}else{printf("Enum Devices succeed!\r\n");}if (stDeviceList.nDeviceNum > 0){for (unsigned int i = 0; i < stDeviceList.nDeviceNum; i++){printf("[device %d]:\r\n", i);MV_CODEREADER_DEVICE_INFO* pDeviceInfo = stDeviceList.pDeviceInfo[i];if (NULL == pDeviceInfo){break;}PrintDeviceInfo(pDeviceInfo);}}else{printf("Find No Devices!\r\n");break;}printf("Please Intput camera index:");unsigned int nIndex = 0;scanf("%d", &nIndex);if (nIndex >= stDeviceList.nDeviceNum){printf("Intput error!\r\n");break;}// ch:选择设备并创建句柄 | Select device and create handlenRet = MV_CODEREADER_CreateHandle(&handle, stDeviceList.pDeviceInfo[nIndex]);if (MV_CODEREADER_OK != nRet){printf("Create Handle fail! nRet [%#x]\r\n", nRet);break;}else{printf("Create Handle succeed!\r\n");}// ch:打开设备 | Open devicenRet = MV_CODEREADER_OpenDevice(handle);if (MV_CODEREADER_OK != nRet){printf("Open Device fail! nRet [%#x]\r\n", nRet);break;}else{printf("Open Device succeed!\r\n");}// ch:设置触发模式为off | eb:Set trigger mode as offnRet = MV_CODEREADER_SetEnumValue(handle, "TriggerMode", MV_CODEREADER_TRIGGER_MODE_OFF);if (MV_CODEREADER_OK != nRet){printf("Set Trigger Mode fail! nRet [%#x]\r\n", nRet);break;}else{printf("Set Trigger Mode succeed!\r\n");}// ch:开始取流 | en:Start grab imagenRet = MV_CODEREADER_StartGrabbing(handle);if (MV_CODEREADER_OK != nRet){printf("Start Grabbing fail! nRet [%#x]\r\n", nRet);break;}else{printf("Start Grabbing succeed!\r\n");}pthread_t nThreadID;nRet = pthread_create(&nThreadID, NULL, GrabImageThread, handle);if (MV_CODEREADER_OK != nRet){printf("Thread create failed! nRet [%d]\r\n", nRet);break;}PressEnterToExit();nRet = pthread_join(nThreadID, NULL);if (MV_CODEREADER_OK != nRet){printf("Thread free failed! nRet = [%d]\r\n", nRet);bIsNormalRun = false;break;}// ch:停止取流 | en:Stop grab imagenRet = MV_CODEREADER_StopGrabbing(handle);if (MV_CODEREADER_OK != nRet){printf("Stop Grabbing fail! nRet [%#x]\r\n", nRet);bIsNormalRun = false;break;}else{printf("Stop Grabbing succeed!\r\n");}// ch:关闭设备 | en:close devicenRet = MV_CODEREADER_CloseDevice(handle);if (MV_CODEREADER_OK != nRet){printf("MV_CODEREADER_CloseDevice fail! nRet [%#x]\r\n", nRet);bIsNormalRun = false;break;}else{printf("MV_CODEREADER_CloseDevice succeed!\r\n");}// ch:销毁句柄 | en:Destroy handlenRet = MV_CODEREADER_DestroyHandle(handle);if (MV_CODEREADER_OK != nRet){printf("MV_CODEREADER_DestroyHandle fail! nRet [%#x]\r\n", nRet);bIsNormalRun = false;break;}else{handle = NULL;printf("MV_CODEREADER_DestroyHandle succeed!\r\n");}} while (0);if (handle != NULL){// ch:关闭设备 | en:Close device// ch:销毁句柄 | en:Destroy handleMV_CODEREADER_CloseDevice(handle);MV_CODEREADER_DestroyHandle(handle);handle = NULL;}if (bIsNormalRun){printf("Exit!\r\n"); }if (false == bIsNormalRun){PressEnterToExit();printf("Exit!\r\n");}return 0;}输出的结果
相关文章:
Ubuntu 连接海康智能相机步骤(亲测,成功读码)
ubuntu20.04下连接海康智能相机 Ubuntu 连接海康智能相机步骤(亲测,已成功读码)输出的结果 Ubuntu 连接海康智能相机步骤(亲测,已成功读码) (就是按照海康的提供的步骤和源码连接相机,流水账) 安装Ubuntu20.04安装gcc和g,IDmvs只…...

sass笔记
声明变量 通过$标识符进行命名及引用混合器 类似vue中的函数 通过 mixin标识定义 include 标识调用& 父选择器标识extend 进行继承可嵌套可导入 通过 import 文件位置’ 、进行导入 <style> //1 声明变量 $name: 15px; $color: skyblue;mixin border-radius($num) {/…...

C/C++中volatile关键字详解
1. 为什么用volatile? C/C 中的 volatile 关键字和 const 对应,用来修饰变量,通常用于建立语言级别的 memory barrier。这是 BS 在 "The C Programming Language" 对 volatile 修饰词的说明: A volatile specifier is a hint to a…...
Linux:shell脚本:基础使用(4)《正则表达式-grep工具》
正则表达式定义: 使用单个字符串来描述,匹配一系列符合某个句法规则的字符串 正则表达式的组成: 普通字符串: 大小写字母,数字,标点符号及一些其他符号 元字符:在正则表达式中具有特殊意义的专用字符 正则表…...

如何建立单元测试
快速开始 zixun-quickstart-mk3生成的项目已经配置好了基础的BaseTest,各个测试类只需要继承BaseTest就可以开始进行单元测试的编写了。 如何进行Mock 为了保证独立性和可重复执行,所有的外部依赖都需要进行Mock,SpringTest引入了Mockito作为单测Mock组件, Mickito官方文…...

typeScript 接口和类
工具: PlayGround 接口 接口用来定义对象的结构和类型,描述对象应该具有哪些属性和方法。 它仅用于声明,而不是实现; 这对于编写可重用的代码非常有用。它可用于: 关键字是interface, 注意:它…...

这项与越来越多企业有关的行业标准,网易云信深度参与制定!
近日,由中国信息通信研究院主办的 2023 数字生态发展大会暨中国信通院“铸基计划”年中会议在北京召开。本次大会发布了中国信通院在行业数字化转型中的观察和实践,并发布了中国信通院在数字化转型领域的多项工作成果。大会定向邀请了来自通信、云计算、…...

C语言,malloc使用规范
malloc 是 C 语言中用于分配内存的函数。它的名称是“memory allocation”的缩写。malloc 是在 <stdlib.h> 头文件中定义的。 malloc 的基本语法是: void* malloc(size_t size); 其中 size_t是要分配的字节数。如果分配成功,malloc返回一个指向分配…...
广度优先遍历与最短路径(Java 实例代码源码包下载)
目录 广度优先遍历与最短路径 Java 实例代码 src/runoob/graph/ShortestPath.java 文件代码: 广度优先遍历与最短路径 广度优先遍历从某个顶点 v 出发,首先访问这个结点,并将其标记为已访问过,然后顺序访问结点v的所有未被访问…...
 创建UDR外部函数)
南大通用数据库(Gbase 8s) 创建UDR外部函数
一、在使用 date_format、from_unixtime、to_days、yearweek 函数时,Gbase 8s 数据库不支持,可以使用创建 UDR 外部函数来实现 二、登录命令控制台或者使用 navicat 连接 Gbase 数据库 这里使用 navicat ,点击新增连接选择 PostGreSql 驱动…...
步入React正殿 - State进阶
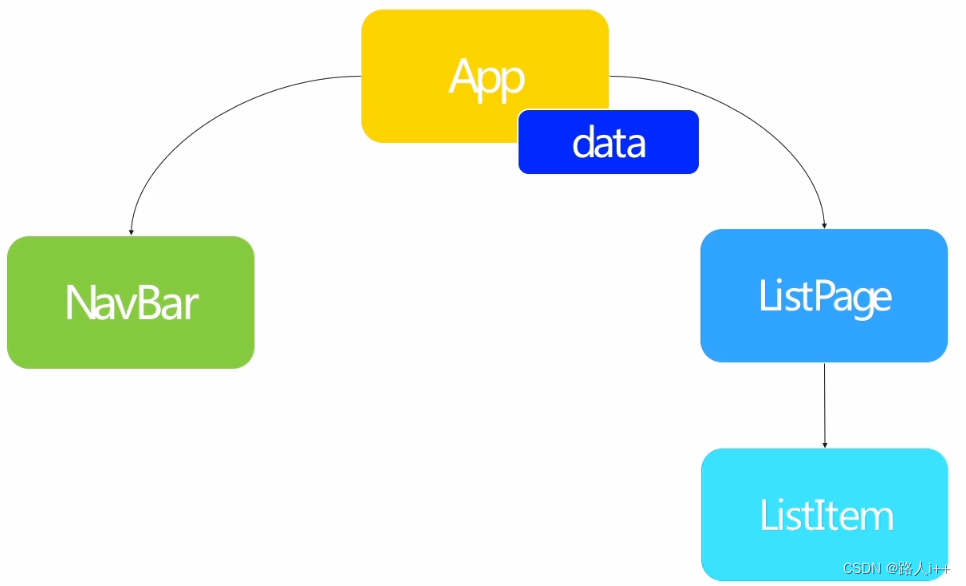
目录 扩展学习资料 State进阶知识点 状态更新扩展 shouldComponentUpdate PureComponent 为何使用不变数据【保证数据引用不会出错】 单一数据源 /src/App.js /src/components/listItem.jsx 状态提升 /src/components/navbar.jsx /src/components/listPage.jsx src/A…...
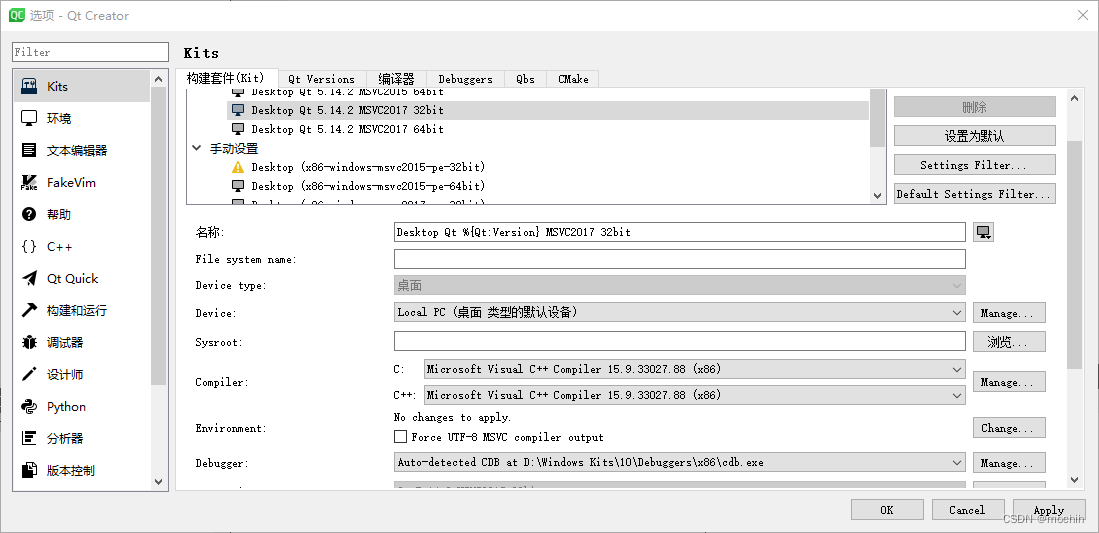
【QT+ffmpeg】QT+ffmpeg 环境搭建
1.qt下载地址 download.qt.io/archive/ 2. win10sdk 下载 https://developer.microsoft.com/en-us/windows/downloads/windows-sdk/ 安装 debug工具路径 qtcreater会自动识别 调试器选择...

责任链模式解决多个ifelse问题
责任链定义 责任链模式(Chain of Responsibility Pattern)是一种行为型设计模式,它允许多个对象按照顺序处理请求,直到其中一个对象能够处理该请求为止。 在责任链模式中,通常有一个抽象处理者(Handler&a…...
Lnton羚通关于PyTorch的保存和加载模型基础知识
SAVE AND LOAD THE MODEL (保存和加载模型) PyTorch 模型存储学习到的参数在内部状态字典中,称为 state_dict, 他们的持久化通过 torch.save 方法。 model models.shufflenet_v2_x0_5(pretrainedTrue) torch.save(model, "../../data/ShuffleNetV2_X0.5.pth…...
python+django+mysql项目实践四(信息修改+用户登陆)
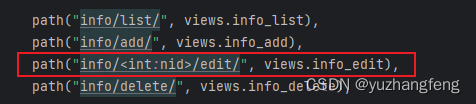
python项目实践 环境说明: Pycharm 开发环境 Django 前端 MySQL 数据库 Navicat 数据库管理 用户信息修改 修改用户信息需要显示原内容,进行修改 通过url传递编号 urls views 修改内容需要用数据库的更新,用update进行更新,用filter进行选择 输入参数多nid,传递要修…...

sCrypt编程马拉松于8月13日在复旦大学成功举办
继6月在英国Exeter大学成功举办了为期一周的区块链编程马拉松后,美国sCrypt公司创始人兼CEO刘晓晖博士带领核心团队成员王一强、郑宏锋、周全,于8月13日在复旦大学再次成功举办了一场全新的sCrypt编程马拉松。 本次活动由上海可一澈科技有限公司与复旦大…...

Selenium手动和自动两种方式启动Chrome驱动
1. 自动启动chrome驱动(已经安装了Selenium库和Chrome驱动) 要使用Selenium自动跟随自带的Chrome驱动,你需要首先确保你已经安装了Selenium库和Chrome驱动。然后,你可以按照以下步骤进行操作: 导入必要的库: from selenium imp…...

《PostgreSQL 开发指南》第32篇 物化视图
物化视图概述 物化视图(Materialized View)是 PostgreSQL 提供的一个扩展功能,它是介于视图和表之间的一种对象。 物化视图和视图的最大区别是它不仅存储定义中的查询语句,而且可以像表一样存储数据。物化视图和表的最大区别是它…...

【RocketMQ】快速入门
文章目录 消费模式同步消息异步消息单向消息延迟消息批量消息顺序消息事务消息Tag标签和Key键Tag的使用Key的使用 首先引入rocketmq的依赖 <dependency><groupId>org.apache.rocketmq</groupId><artifactId>rocketmq-client</artifactId><ve…...

AB跳转轮询:让你的独立站收款智能化
独立站在近两年成为跨境电商的热门布局之一,特别是在亚马逊封号潮后,许多卖家开始转向独立站运营。然而,在迅速发展的同时,也不可避免地出现了一些问题,比如很多卖家的资金经常被不同程度地冻结,好不容易出…...

DeepSeek 赋能智慧能源:微电网优化调度的智能革新路径
目录 一、智慧能源微电网优化调度概述1.1 智慧能源微电网概念1.2 优化调度的重要性1.3 目前面临的挑战 二、DeepSeek 技术探秘2.1 DeepSeek 技术原理2.2 DeepSeek 独特优势2.3 DeepSeek 在 AI 领域地位 三、DeepSeek 在微电网优化调度中的应用剖析3.1 数据处理与分析3.2 预测与…...
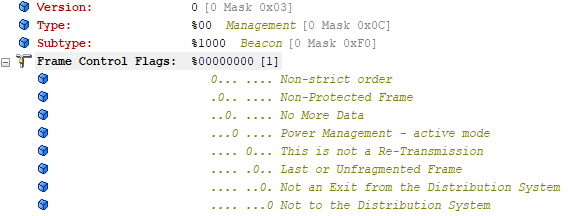
【WiFi帧结构】
文章目录 帧结构MAC头部管理帧 帧结构 Wi-Fi的帧分为三部分组成:MAC头部frame bodyFCS,其中MAC是固定格式的,frame body是可变长度。 MAC头部有frame control,duration,address1,address2,addre…...

前端导出带有合并单元格的列表
// 导出async function exportExcel(fileName "共识调整.xlsx") {// 所有数据const exportData await getAllMainData();// 表头内容let fitstTitleList [];const secondTitleList [];allColumns.value.forEach(column > {if (!column.children) {fitstTitleL…...

【SQL学习笔记1】增删改查+多表连接全解析(内附SQL免费在线练习工具)
可以使用Sqliteviz这个网站免费编写sql语句,它能够让用户直接在浏览器内练习SQL的语法,不需要安装任何软件。 链接如下: sqliteviz 注意: 在转写SQL语法时,关键字之间有一个特定的顺序,这个顺序会影响到…...

VTK如何让部分单位不可见
最近遇到一个需求,需要让一个vtkDataSet中的部分单元不可见,查阅了一些资料大概有以下几种方式 1.通过颜色映射表来进行,是最正规的做法 vtkNew<vtkLookupTable> lut; //值为0不显示,主要是最后一个参数,透明度…...
12.找到字符串中所有字母异位词
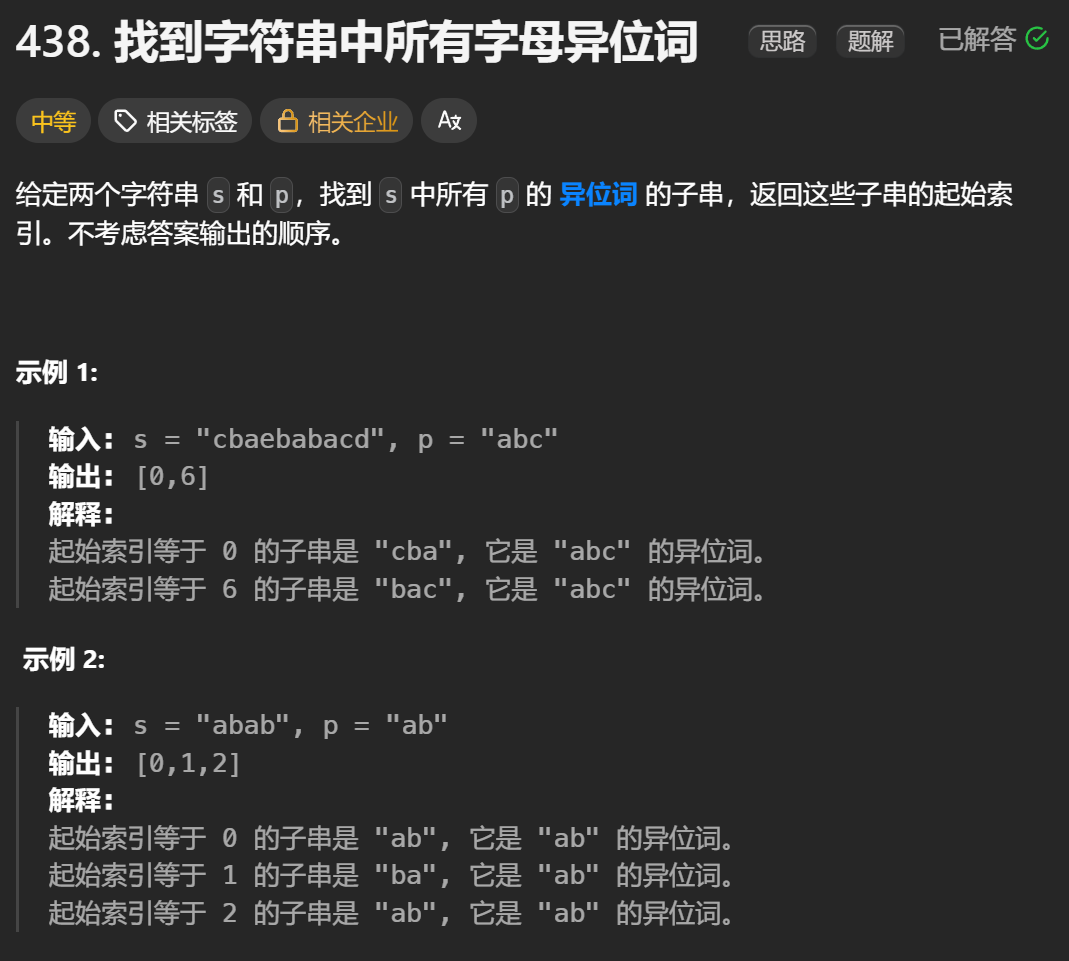
🧠 题目解析 题目描述: 给定两个字符串 s 和 p,找出 s 中所有 p 的字母异位词的起始索引。 返回的答案以数组形式表示。 字母异位词定义: 若两个字符串包含的字符种类和出现次数完全相同,顺序无所谓,则互为…...

稳定币的深度剖析与展望
一、引言 在当今数字化浪潮席卷全球的时代,加密货币作为一种新兴的金融现象,正以前所未有的速度改变着我们对传统货币和金融体系的认知。然而,加密货币市场的高度波动性却成为了其广泛应用和普及的一大障碍。在这样的背景下,稳定…...
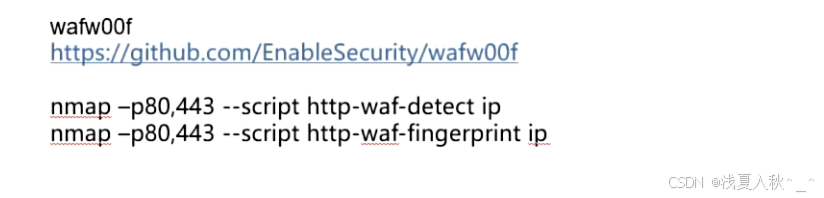
网站指纹识别
网站指纹识别 网站的最基本组成:服务器(操作系统)、中间件(web容器)、脚本语言、数据厍 为什么要了解这些?举个例子:发现了一个文件读取漏洞,我们需要读/etc/passwd,如…...
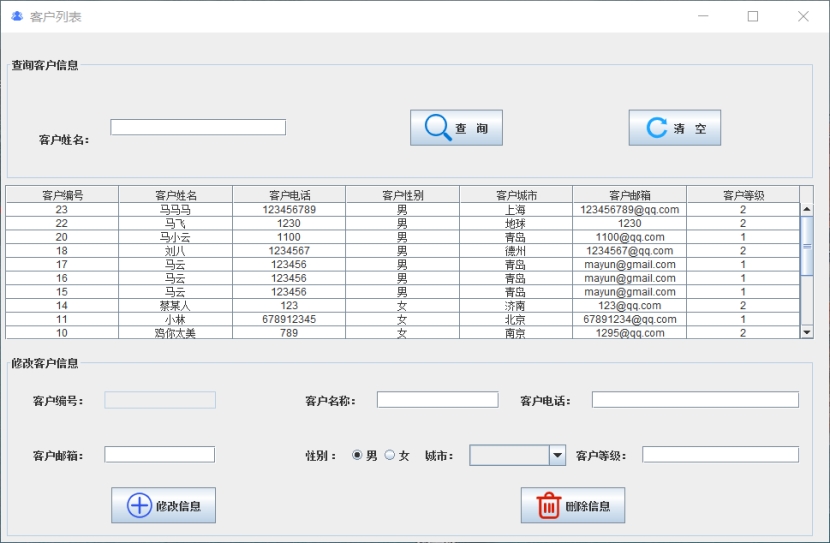
基于Java+MySQL实现(GUI)客户管理系统
客户资料管理系统的设计与实现 第一章 需求分析 1.1 需求总体介绍 本项目为了方便维护客户信息为了方便维护客户信息,对客户进行统一管理,可以把所有客户信息录入系统,进行维护和统计功能。可通过文件的方式保存相关录入数据,对…...

MySQL 部分重点知识篇
一、数据库对象 1. 主键 定义 :主键是用于唯一标识表中每一行记录的字段或字段组合。它具有唯一性和非空性特点。 作用 :确保数据的完整性,便于数据的查询和管理。 示例 :在学生信息表中,学号可以作为主键ÿ…...