Linux驱动开发之点亮三盏小灯
头文件
#ifndef __HEAD_H__
#define __HEAD_H__//LED1和LED3的硬件地址
#define PHY_LED1_MODER 0x50006000
#define PHY_LED1_ODR 0x50006014
#define PHY_LED1_RCC 0x50000A28
//LED2的硬件地址
#define PHY_LED2_MODER 0x50007000
#define PHY_LED2_ODR 0x50007014
#define PHY_LED2_RCC 0x50000A28#endif驱动代码
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include <linux/device.h>
#include "head.h"
int major;
char kbuf[128]={0};
//定义指针接收映射成功的虚拟内存首地址
unsigned int *vir_moder1;
unsigned int *vir_odr1;
unsigned int *vir_rcc1;unsigned int *vir_moder2;
unsigned int *vir_odr2;
unsigned int *vir_rcc2;//定义一个指针用来接收创建类
struct class *cls;//定义一个指针用来接收接收创建设备信息
struct device *dev;
// 封装操作方法
int mycdev_open(struct inode * inode, struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}
ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);int ret;ret=copy_to_user(ubuf,kbuf,size);if(ret){printk("copy_to_user filad\n");return ret;}return 0;
}
ssize_t mycdev_write(struct file *file, const char *ubuf, size_t size, loff_t *lof)
{int ret;ret=copy_from_user(kbuf,ubuf,size);if(ret){printk("copy_from_user filed\n");return ret;}if(kbuf[0]=='1' && kbuf[1] == '1')//LED1开灯{//开灯逻辑(*vir_odr1) |= (0X1<<10);}else if(kbuf[0]=='1' && kbuf[1] == '0')//LED1关灯{//关灯逻辑(*vir_odr1) &= (~(0X1<<10));}else if(kbuf[0]=='2' && kbuf[1] == '1')//LED2开灯{//开灯逻辑(*vir_odr2) |= (0X1<<10);}else if(kbuf[0]=='2' && kbuf[1] == '0')//LED1关灯{//关灯逻辑(*vir_odr2) &= (~(0X1<<10));}else if(kbuf[0]=='3' && kbuf[1] == '1')//LED#开灯{//开灯逻辑(*vir_odr1) |= (0X1<<8);}else if(kbuf[0]=='3' && kbuf[1] == '0')//LED3关灯{//关灯逻辑(*vir_odr1) &= (~(0X1<<8));}return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}
// 定义操作方法结构体遍历并且初始化
struct file_operations fops = {.open=mycdev_open,.read=mycdev_read,.write=mycdev_write,.release=mycdev_close,
};static int __init mycdev_init(void)
{int i;// 注册字符设备驱动major = register_chrdev(0, "mychrdev", &fops);if(major<0){printk("字符设备驱动注册失败\n");return major;}printk("字符设备驱动注册成功major=%d\n",major);//向上提交目录信息cls = class_create(THIS_MODULE,"mycdev");if(IS_ERR(cls)){printk("向上提交目录信息失败\n");return -PTR_ERR(cls);}printk("向上提交目录信息成功\n");//向上提交设备信息for(i=0;i<3;i++){dev=device_create(cls,NULL,MKDEV(major,i),NULL,"mycdev%d",i);if(IS_ERR(cls)){printk("向上提交设备信息信息失败\n");return -PTR_ERR(cls);}}printk("向上提交设备信息成功\n");//完成硬件寄存器物理内存的映射vir_moder1=ioremap(PHY_LED1_MODER,4);if(vir_moder1==NULL){printk("LED1物理内存映射失败%d\n",__LINE__);return -EFAULT;}vir_odr1=ioremap(PHY_LED1_ODR,4);if(vir_odr1==NULL){printk("LED1物理内存映射失败%d\n",__LINE__);return -EFAULT;}vir_rcc1=ioremap(PHY_LED1_RCC,4);if(vir_rcc1==NULL){printk("LED1物理内存映射失败%d\n",__LINE__);return -EFAULT;}printk("LED1物理内存映射成功\n");//LED2物理内存映射vir_moder2=ioremap(PHY_LED2_MODER,4);if(vir_moder2==NULL){printk("LED2物理内存映射失败%d\n",__LINE__);return -EFAULT;}vir_odr2=ioremap(PHY_LED2_ODR,4);if(vir_odr2==NULL){printk("LED2物理内存映射失败%d\n",__LINE__);return -EFAULT;}vir_rcc2=ioremap(PHY_LED2_RCC,4);if(vir_rcc2==NULL){printk("LED2物理内存映射失败%d\n",__LINE__);return -EFAULT;}printk("LED2物理内存映射成功\n");//LED3物理内存映射vir_moder1=ioremap(PHY_LED1_MODER,4);if(vir_moder1==NULL){printk("LED3物理内存映射失败%d\n",__LINE__);return -EFAULT;}vir_odr1=ioremap(PHY_LED1_ODR,4);if(vir_odr1==NULL){printk("LED3物理内存映射失败%d\n",__LINE__);return -EFAULT;}vir_rcc1=ioremap(PHY_LED1_RCC,4);if(vir_rcc1==NULL){printk("LED3物理内存映射失败%d\n",__LINE__);return -EFAULT;}printk("LED3物理内存映射成功\n");//硬件寄存器的初始化//LED1硬件初始化(*vir_moder1) &= (~(0X3<<20));//设置为输出(*vir_moder1) |= (0X1<<20);//LED2硬件初始化(*vir_moder2) &= (~(0X3<<20));//设置为输出(*vir_moder2) |= (0X1<<20);//LED3硬件初始化(*vir_moder1) &= (~(0X3<<16));//设置为输出(*vir_moder1) |= (0X1<<16);//rcc使能(*vir_rcc1) |= (0X1<<4);(*vir_rcc2) |= (0X1<<5);//默认关灯(*vir_odr1) &= (~(0X1<<10));(*vir_odr2) &= (~(0X1<<10));(*vir_odr1) &= (~(0X1<<8));return 0;
}
static void __exit mycdev_exit(void)
{//取消物理内存的映射iounmap(vir_moder1);iounmap(vir_odr1);iounmap(vir_rcc1);iounmap(vir_moder2);iounmap(vir_odr2);iounmap(vir_rcc2);//销毁设备信息int i;for(i=0;i<3;i++){device_destroy(cls,MKDEV(major,i));}//销毁目录信息class_destroy(cls);//字符设备驱动的注销unregister_chrdev(major,"mychrdev");
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");测试文件
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
int main(int argc, const char *argv[])
{char buf[128] = {};int fd0 = open("/dev/mycdev0", O_RDWR);int fd1 = open("/dev/mycdev1", O_RDWR);int fd2 = open("/dev/mycdev2", O_RDWR);if (fd0 < 0){printf("打开设备文件失败\n");exit(-1);}printf("成功打开设备文件\n");while (1){printf("逻辑关系:例如11表示LED1亮 10表示LED1灭...\n");fgets(buf, sizeof(buf), stdin); // 从终端读一个字符串存放在bufbuf[strlen(buf) - 1] = '\0';if(buf[0] == '1'){write(fd0, buf, sizeof(buf)); // 将从终端得到的字符串传递到驱动}else if(buf[0] == '2'){write(fd1, buf, sizeof(buf));}else if(buf[0] == '3'){write(fd2, buf, sizeof(buf));}}close(fd0);return 0;
}结果
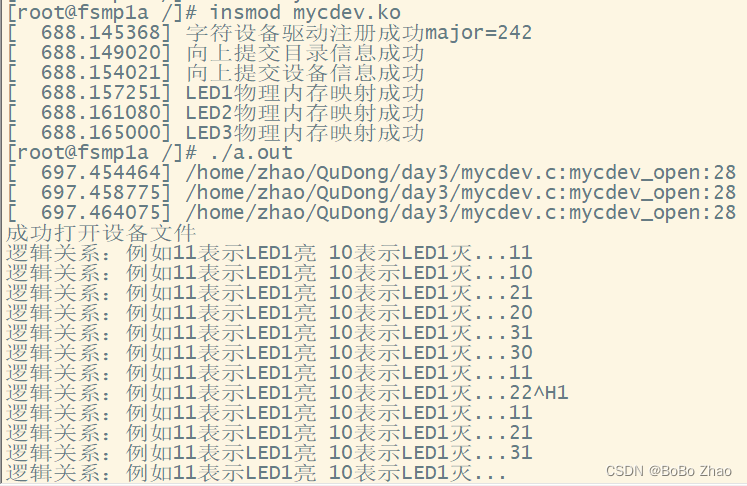
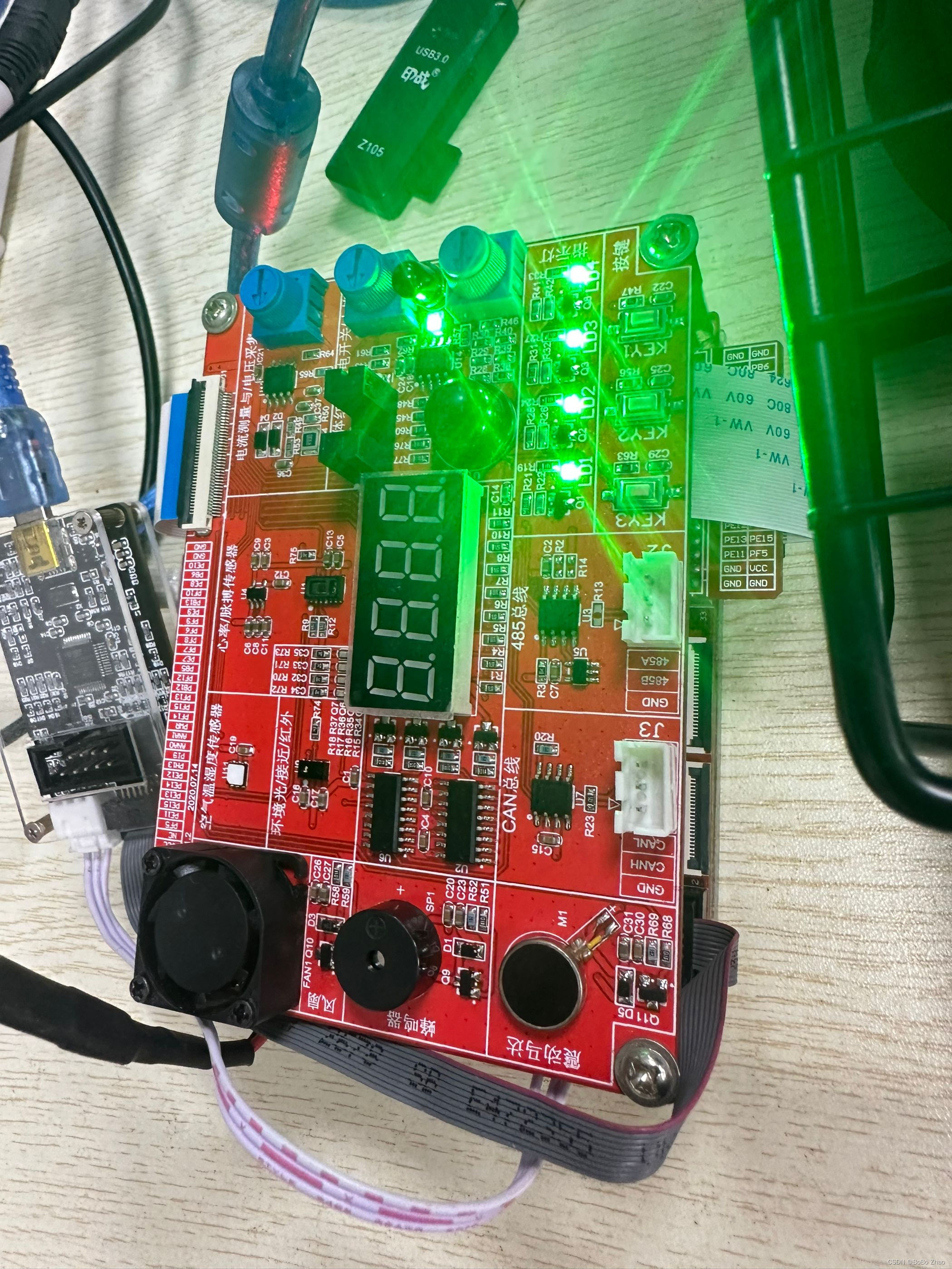
实现效果如上
相关文章:
Linux驱动开发之点亮三盏小灯
头文件 #ifndef __HEAD_H__ #define __HEAD_H__//LED1和LED3的硬件地址 #define PHY_LED1_MODER 0x50006000 #define PHY_LED1_ODR 0x50006014 #define PHY_LED1_RCC 0x50000A28 //LED2的硬件地址 #define PHY_LED2_MODER 0x50007000 #define PHY_LED2_ODR 0x50007014 #define…...

【SA8295P 源码分析】71 - QAM8295P 原理图参考设计 之 MIPI DSI 接口硬件原理分析
【SA8295P 源码分析】71 - QAM8295P 原理图参考设计 之 MIPI DSI 接口硬件原理分析 一、MIPI-DSI 接口介绍二、高通参考硬件原理图分析:ANX7625 桥接芯片方案2.1 高通参考设计:两路 4-Lane DSI 接口2.2 高通参考设计:DSI0 硬件原理图,将 4 Lane DSI数据通过 ANX7625 桥接芯…...
macOS(m1/m2)破解Sublime Text和Navicat16
破解Sublime Text 说明:全程使用的是终端操作 1. 下载Sublime Text,建议使用brew下载 2. 进入到下载的app的文件夹 cd "/Applications/Sublime Text.app/Contents/MacOS/"3. 执行以下操作以确认版本是否匹配 md5 -q sublime_text | grep -i…...

【排排站:探索数据结构中的队列奇象】
本章重点 队列的概念及结构 队列的实现方式 链表方式实现栈接口 队列面试题 一、队列的概念及结构 队列:只允许在一端进行插入数据操作,在另一端进行删除数据操作的特殊线性表,队列具有先进先出 FIFO(First In First Out) 入队列&#x…...

Mac OS 中JDK 环境(jdk 1.8.0_831)安装配置、环境变量配置及卸载操作
前言: 摊牌了,本来就有点喜新厌旧的我,特意把系统和开发环境都拉到比较高,想试验一下兼容性和某些新特性,探索了一下新大陆,也见识了各种光怪陆离的妖魔鬼怪。 因为要着手云平台项目的重构改版和新系统的架…...
[JAVAee]Tomcat - Servlet
目录 Tomcat Servlet的工作 创建Servlet ①项目 ②依赖 ③目录 ④代码 ⑤打包 ⑥部署 ⑦验证 Servlet的运行原理 Servlet API HttpServlet 方法 处理Get/POST请求 HttpServletRequest 方法 获取请求中的信息 获取GET请求中的参数 获取POST请求中的参数…...
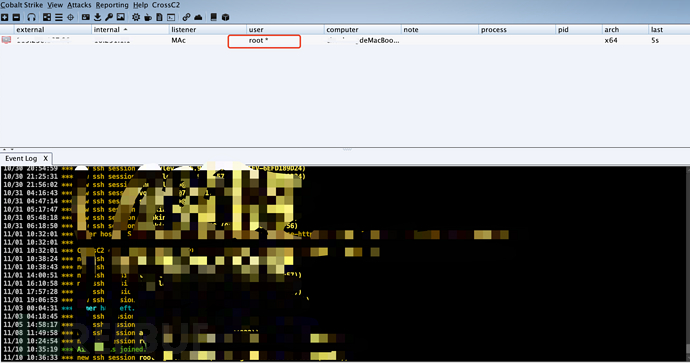
MAC钓鱼并Root权限上线CS并权限维持,以及所有的坑如何解决
本文转载于:https://www.freebuf.com/articles/web/350592.html 作者:文鸯涂鸦智能安全实验室 制作MAC 一、下载工具 首先从github上下载CrossC2。链接:https://github.com/gloxec/CrossC2/releases/tag/v3.1.0。 根据你CS客户端的操作系统选…...

浅谈OCR中的David Shepard
在OCR(Optical Character Recognition,光学字符识别)中,David Shepard是一种早期的OCR技术,也被称为Shepards Method。 David Shepard是该OCR方法的原始作者。这种方法基于边界追踪算法,用于识别印刷体文本…...

draw.io导出矢量图到word报错text is not svg - cannot display
先参考https://blog.csdn.net/a625750076/article/details/126384831 如果不行,可能是转存的问题 解决方法:直接在draw.io上操作 第一步 第二步 然后再word中粘贴,依旧是矢量图哦!...

JVM加强
目录 JVM运行时的数据区(内存结构): 线程独享: 线程共享: 什么时候会内存溢出 JVM有哪些垃圾回收算法 GC如何判断对象可以被回收 典型的垃圾回收器 CMS: G1: 类加载器和双亲委派机制&a…...

解决Oracle中XML插入数据时的空格问题
🌷🍁 博主猫头虎 带您 Go to New World.✨🍁 🦄 博客首页——猫头虎的博客🎐 🐳《面试题大全专栏》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~🌺 &a…...
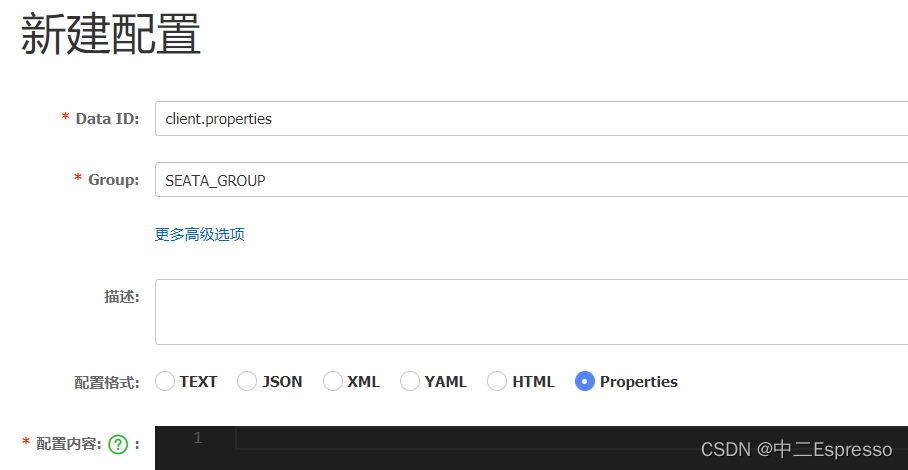
微服务中间件--分布式事务
分布式事务 a.理论基础1) CAP定理2) BASE理论 b.Seata1) XA模式1.a) 实现XA模式 2) AT模式3) TCC模式3.a) 代码实现 4) Saga模式5) 四种模式对比6) TC的异地多机房容灾架构 a.理论基础 1) CAP定理 分布式系统有三个指标: Consistency(一致性ÿ…...
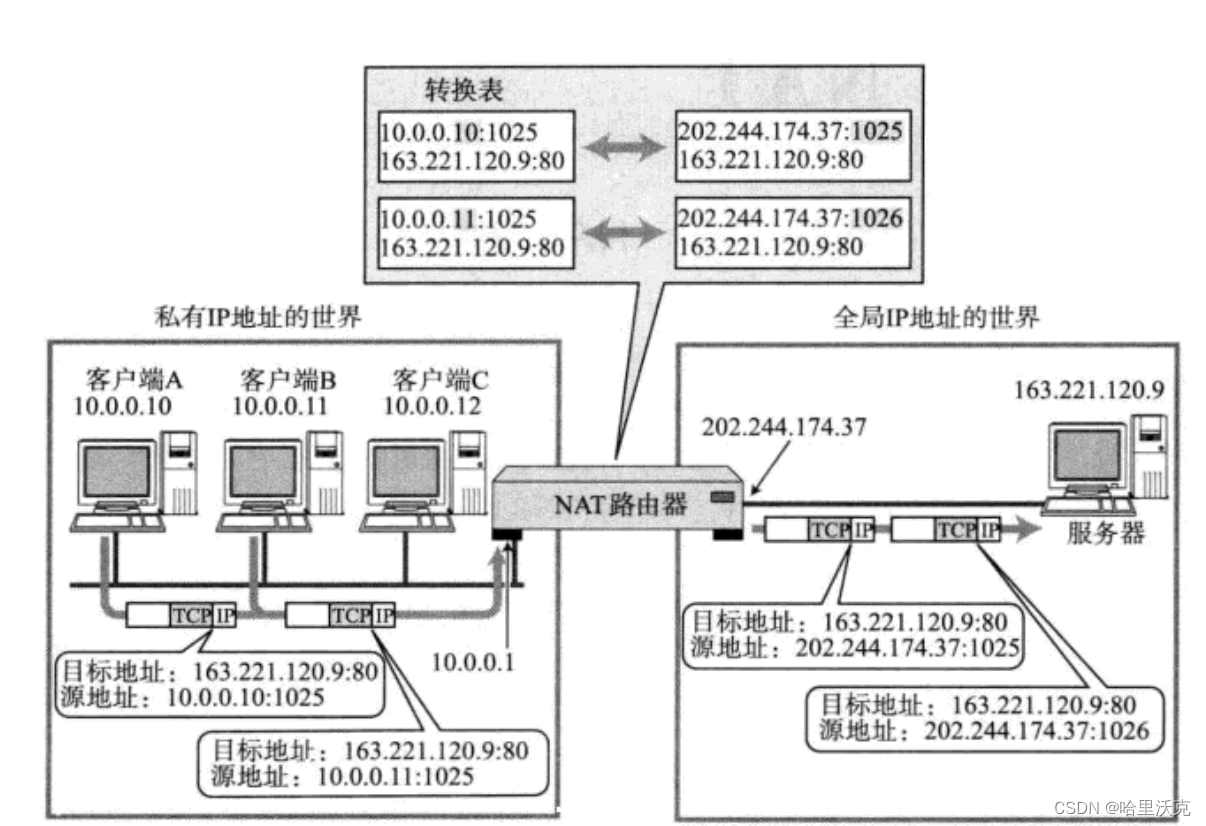
计算机网络(9) --- 数据链路层与MAC帧
计算机网络(8) --- IP与IP协议_哈里沃克的博客-CSDN博客IP与IP协议https://blog.csdn.net/m0_63488627/article/details/132155460?spm1001.2014.3001.5502 目录 1.MAC帧 1.MAC地址 2.MAC帧报头 3.资源碰撞 4.MTU 1.对IP协议的影响 2.对UDP协议…...
【学会动态规划】环绕字符串中唯一的子字符串(25)
目录 动态规划怎么学? 1. 题目解析 2. 算法原理 1. 状态表示 2. 状态转移方程 3. 初始化 4. 填表顺序 5. 返回值 3. 代码编写 写在最后: 动态规划怎么学? 学习一个算法没有捷径,更何况是学习动态规划, 跟我…...

CNN卷积详解(三)
一、卷积层的计算 4 ∗ * ∗ 4的输入矩阵 I I I 和 3 ∗ * ∗ 3 的卷积核 K K K: 在步长(stride)为 1 时,输出的大小为 ( 4 − 3 1 ) ( 4 − 3 1) 计算公式: ● 输入图片矩阵 I I I 大小: w w w w ww ●…...

使用 Amazon Redshift Serverless 和 Toucan 构建数据故事应用程序
这是由 Toucan 的解决方案工程师 Django Bouchez与亚马逊云科技共同撰写的特约文章。 带有控制面板、报告和分析的商业智能(BI,Business Intelligence)仍是最受欢迎的数据和分析使用场景之一。它为业务分析师和经理提供企业的过去状态和当前状…...

CentOS 上快速安装包管理工具Conda
要在 CentOS 上安装 Conda,您可以按照以下步骤进行操作: 1. 下载 Miniconda 或 Anaconda 安装脚本: Miniconda:适用于轻量级安装的 Miniconda 版本。 wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.…...
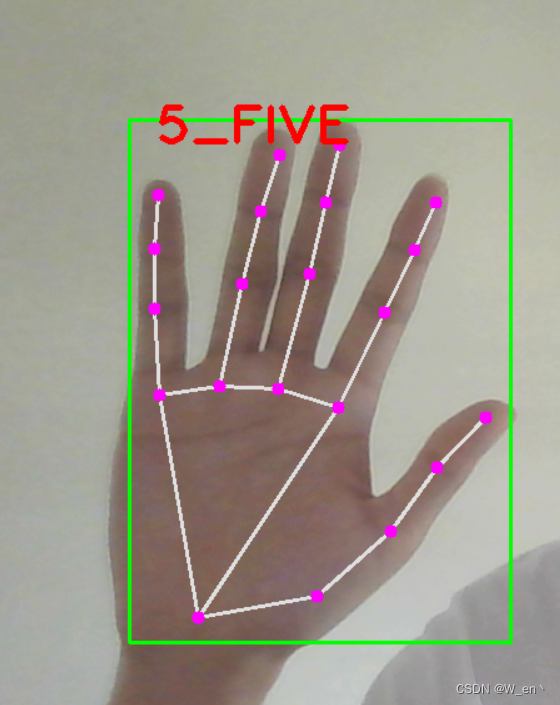
opencv-手势识别
# HandTrackingModule.py import cv2 import mediapipe as mpclass HandDetector:"""使用mediapipe库查找手。导出地标像素格式。添加了额外的功能。如查找方式,许多手指向上或两个手指之间的距离。而且提供找到的手的边界框信息。"""…...
qcdisplaycfg_ADP_STAR_LA.xml 配置文件解析)
【SA8295P 源码分析】10 - HQX Display(OpenWFD)qcdisplaycfg_ADP_STAR_LA.xml 配置文件解析
【SA8295P 源码分析】10 - HQX Display(OpenWFD)qcdisplaycfg_ADP_STAR_LA.xml 配置文件解析 一、HQX Display 介绍1.1 OpenWF Display Driver二、HQX Display 配置文件参数解析2.1 qcdisplaycfg.xml 配置文件2.1 配置两个 DPUs in QNX2.1.1 配置 graphics_ADP_STAR.conf : …...

达梦数据库权限和预定角色介绍
概述 本文对达梦数据库数据库和对象权限及DM预定义角色及角色创建进行介绍。 1.权限管理 用户权限有两类:数据库权限和对象权限。 数据库权限主要是指针对数据库对象的创建、删除、修改的权限,对数据库备份等权限。 数据库权限一般由 SYSDBA、SYSAU…...

Windows平台VVC视频编码实战:VTM10.0环境搭建与性能调优指南
1. 为什么选择VVC和VTM10.0 视频编码技术这几年发展飞快,从H.264到HEVC再到现在的VVC(Versatile Video Coding),每一次迭代都能带来接近50%的压缩率提升。VVC作为最新的国际视频编码标准,在4K/8K、HDR、360度全景视频等…...

DeepSeek-OCR · 万象识界实战案例:企业合同扫描件自动转Markdown结构化处理
DeepSeek-OCR 万象识界实战案例:企业合同扫描件自动转Markdown结构化处理 你有没有遇到过这样的情况?公司财务部送来一沓合同扫描件,要求你把关键信息整理成电子文档。你打开PDF,看着密密麻麻的文字和表格,心里默默计…...

聊聊 GitHub CLI,以及我为什么不再手动配 SSH 了
传统认证方式到底哪里难受? 说实话,在接触 gh 之前,我一直觉得 GitHub 的认证这块挺烦的。不是说它不能用,而是用起来总有点别扭。 先说用 HTTPS 加令牌这条路。GitHub 要求你去网页端生成一串很长的字符串,复制下来&a…...

WeKnora镜像体验:开箱即用的知识库问答,专治AI胡说八道
WeKnora镜像体验:开箱即用的知识库问答,专治AI胡说八道 1. 为什么我们总被AI“忽悠”? 你有没有过这样的经历?你拿着一份刚收到的产品规格书,问AI:“这个设备的额定功率是多少?”AI信心十足地…...

从NLDM到CCS:揭秘先进工艺下时序模型的演进与实战选择
1. 时序模型的基础概念与重要性 在芯片设计领域,时序模型就像建筑师的施工图纸一样关键。想象一下,如果你要建造一座摩天大楼,但没有精确的图纸告诉你每根钢筋的承重能力和连接方式,结果会怎样?同样,在芯片…...

Lychee-Rerank-MM保姆级教程:Gradio界面操作+指令模板定制+结果导出
Lychee-Rerank-MM保姆级教程:Gradio界面操作指令模板定制结果导出 1. 引言:重新定义图文检索的精排体验 你是否曾经遇到过这样的困扰:在搜索图片或文字时,系统返回的结果总是差强人意?明明输入了准确的关键词&#x…...

AI时代,最珍贵的能力从不是会用AI,而是这一种
罗振宇与尹烨在一次对话节目中,曾抛出一个直击人心的问题:AI浪潮席卷而来,人人都在焦虑被替代,到底什么能力,才是人生最坚实的底气? 有人说,是驾驭AI的能力,毕竟工具迭代太快&#…...

Mathematica三维绘图实战:从基础函数到复杂曲面设计
1. Mathematica三维绘图入门指南 第一次打开Mathematica时,很多人会被它强大的数学计算能力所震撼。但你可能不知道,它还是一个隐藏的三维绘图神器。我刚开始接触时也以为需要复杂的编程才能画出漂亮的三维图形,后来发现其实比想象中简单得多…...

ChatGPT安卓集成实战:从SDK接入到性能优化全指南
ChatGPT安卓集成实战:从SDK接入到性能优化全指南 最近在做一个需要集成AI对话功能的安卓应用,目标是把类似ChatGPT的智能对话能力塞进手机里。想法很美好,但真动手了才发现,从SDK接入到最终流畅运行,中间全是“坑”。…...

破解密码.
1.开启虚拟机,快速点击鼠标,用上下键选择第二个选项2.然后按E键3.按左右上下键,将光标移到”quiet"后边,4.输入“rd.break"5.按”ctrlx或F10“,进入该界面6.输入此代码后设置密码(不要设置和之前…...