A*算法图文详解
基本概念
A*算法最早于1964年在IEEE Transactions on Systems Science and Cybernetics中的论文《A Formal Basis for the Heuristic Determination of Minimum Cost Paths》中首次提出。其属于一种经典的启发式搜索方法,所谓启发式搜索,就在于当前搜索结点往下选择下一步结点时,可以通过一个启发函数来进行选择,选择代价最少的结点作为下一步搜索结点而跳转其上。
传统的算法中,深度优先搜索(DFS)和广度优先搜索(BFS)在展开子结点时均属于盲目型搜索,也就是说,它不会选择哪个结点在下一次搜索中更优而去跳转到该结点进行下一步的搜索。在运气不好的情形中,均需要试探完整个解集空间, 显然,只能适用于问题规模不大的搜索问题中。而与DFS,BFS不同的是,一个经过仔细设计的启发函数,往往在很快的时间内就可得到一个搜索问题的最优解。
在原论文中,A*算法的步骤设计如下:
1、标记起点s为open,计算起点的估计代价
2、选择open点集中估计代价最小的点
3、如果选中的点∈目标集合T,即到达目标,标记该点closed,算法结束
4、否则,还未到达目标,标记该点closed,对其周围直达的点计算估计代价,如果周围直达的点未标记为closed,将其标记为open;如果已经标记为closed的,如果重新计算出的估计代价比它原来的估计代价小,更新估计代价,并将其重新标记open。返回第2步。

举个栗子:
例1:
如下图所示,初始时起点位置为5,需要前往位置20,每条路径上的数值代表从该路径经过的代价值。

根据上述公式,首先设置5号点为起点,则它向下有两条路径:前往2号点与前往7号点。两条路径的代价值分别为4跟5。则根据代价函数,我们选择走代价值小一点的点,即前往2号点:

然后根据第三步判断是否到达终点,可知2不是终点。跳转第四步,标记该点位置,同时计算它到周围点的代价值:从2号点可以去7号点,代价值为9;可以去22号点,代价值为16;可以去18号点,代价值为18;可以去10号点,代价值为6。然后调转回第二步。
根据第二步,选择上述点中代价值最小的点,也就是10号点:

然后根据第三步判断是否到达终点,可知10不是终点。跳转第四步,标记该点位置,同时计算它到周围点的代价值:从10号点可以去66号点,代价值为20。
根据第二步,选择上述点中代价值最小的点,也就是66号点:

然后根据第三步判断是否到达终点,可知66不是终点。跳转第四步,标记该点位置,同时计算它到周围点的代价值:从66号点可以去20号点,代价值为6。
根据第二步,选择上述点中代价值最小的点,也就是20号点:

然后根据第三步判断是否到达终点,可知20号是终点,至此,算法结束。得到最优路径5->2->10->66->20。可以看到,A在搜索速度以及准确性上都是很高的,明显优于DFS与BFS。但是注意到一个问题。与Dijkstra不同的是,Dijkstra虽然基于BFS导致搜索速度比较低,但是它的搜索结果一定是最优的。而A虽然能够快速找到一条路径,但是它不一定是最优的。例如例2所示:
例2:
将例1中2到10的代价值从6改为10:

此时,按照上述方式得到的路径应该是:

即通过5->2->18->66->20,总代价值为42。但是实际上从5->20的最优路径应该是5->2->10->66->20,总代价值为40。所以从这里我们也可以看出来,A*虽然在搜索速度上比Dijkstra要快很多,但是它的结果可能不是最优的。
A*与启发函数
看完了例子,对于A* 算法也有了一个初步的了解。那么对于A* 算法而言,它相对于其他算法的优点是什么呢?深度优先搜索的好处是时间快,但是很少能求出最优解;而广度优先搜索确实可以求出最优解,但由于广度优先搜索是一层层搜下去的,必须扩展每一个点,所以时间效率和空间效率都不高。而A* 算法恰可以解决这两个缺点:既有极大概率求出最优解,又可以减少冗余的时间。
那么对于A* 而言它的使用又有哪些需要注意的地方呢?最关键的一点就是在于它的启发函数的确定了,也就是确定上面例子中从一个点到另一个点的代价值。在原算法中,定义了一个代价函数:
f ( n ) = g ( n ) + h ( n ) f(n)=g(n)+h(n) f(n)=g(n)+h(n)
其中f[n]是 是从初始状态经由状态n到目标状态的代价估计,g(n)是从初始到n的实际代价,而h(n)是从n到目标状态的估计代价。
在g和h的估计中,h的估计方法是比较宽泛的,可以是直线距离,也可以是其他(如坐标和之类的),但作者提到,估计h必须要小于真实h才能保证算法是可接收到的,即能找到最优解。如果估计h比真实h大,则可能找到的的不是最优解。
那么设置h为0?可以,但就会变成类似Dijkstra算法,会找到到达地图上各点的最优路线。最终一定也会到达目标集合T中的节点,并标记closed结束算法,但过程中会展开更多无谓的节点,漫无目的地展开。所以,A*算法中很重要的一点就在于这个h的选择。
A*算法与路径规划
A*在移动机器人的路径规划中使用的也非常广泛,对于需要求出一条起点到终点的有效路径的情况下是一种非常合适的算法。
举个非常经典的例子:

从图中的绿色方块运动到红色方块,蓝色为障碍物。首先,我们把地图栅格化,把每一个方格的中心称为节点;这个特殊的方法把我们的搜索区域简化为了 2 维数组。数组的每一项代表一个格子,它的状态就是可走 (walkalbe) 和不可走 (unwalkable) 。通过计算出从 A 到 目标点需要走过哪些方格,就找到了路径。一旦路径找到了,便从一个方格的中心移动到另一个方格的中心,直至到达目的地。

一旦我们把搜寻区域简化为一组可以量化的节点后,我们下一步要做的便是查找最短路径。在 A* 中,我们从起点开始,检查其相邻的方格,然后向四周扩展,直至找到目标:
1、从起点 A 开始,定义A为父节点,并把它加入到 openList中。现在 openList 里只有起点 A ,后面会慢慢加入更多的项。
2、如上图所示,父节点A周围共有8个节点,定义为子节点。将子节点中可达的(reachable)或者可走的(walkable)放入openList中,成为待考察对象。
3、若某个节点既未在openList,也没在closeList中,则表明还未搜索到该节点。
4、初始时, 节点A离自身距离为0,路径完全确定,将其移入closeList中; closeList 中的每个方格都是现在不需要再关注的。
5、路径优劣判断依据是移动代价,单步移动代价采取Manhattan 计算方式(即 d = ∣ x 1 − x 2 ∣ + ∣ y 1 − y 2 ∣ d=|x_1-x_2|+|y_1-y_2| d=∣x1−x2∣+∣y1−y2∣),即把横向和纵向移动一个节点的代价定义为10。斜向移动代价为14
6、现在openList = {B,C,D,E,F,G,H,I}, closeList = {A}
下面我们需要去选择节点A相邻的子节点中移动代价 f 最小的节点,下面以节点I的计算为例。

移动代价评价函数为: f ( n ) = g ( n ) + h ( n )。 f ( n )是从初始状态经由状态n到目标状态的代价估计, g ( n ) 是在状态空间中从初始状态到状态n的实际代价, h ( n ) 是从状态n到目标状态的最佳路径的估计代价。
首先考察 g,由于从A到该格子是斜向移动,单步移动距离为14,故 g = 14.
再考察估计代价 h。估计的含义是指忽略剩下的路径是否包含有障碍物(不可走), 完全按照Manhattan计算方式,计算只做横向或纵向移动的累积代价:横向向右移动3步,纵向向上移动1步,总共4步,故为 h = 40.
因此从A节点移动至I节点的总移动代价为: f = g + h = 54
以此类推,分别计算当前openList中余下的7个子节点的移动代价 f ,从中挑选最小代价节点F,移到closeList中。
现在openList = {B,C,D,E,G,H,I}, closeList = {A,F}
然后继续往下搜索:

从openList中选择 f 值最小的 ( 方格 ) 节点I(D节点的 f值跟I相同,任选其一即可,不过从速度上考虑,选择最后加入 openList 的方格更快。这导致了在寻路过程中,当靠近目标时,优先使用新找到的方格的偏好。 对相同数据的不同对待,只会导致两种版本的 A* 找到等长的不同路径 ),从 openList里取出,放到 closeList 中。
检查所有与它相邻的子节点,忽略不可走 (unwalkable) 的节点、以及忽略已经存在于closeList的节点;如果方格不在openList中,则把它们加入到 openList中,并把它们作为节点I的子节点 。
如果某个相邻的节点(假设为X)已经在 opeLlist 中,则检查这条路径是否更优,也就是说经由当前节点( 我们选中的节点)到达节点X是否具有更小的 g 值。如果没有,不做任何操作。否则,如果 g 值更小,则把X的父节点设为当前方格 ,然后重新计算X的 f 值和 g 值。
判断完所有子节点后,现在openList = {B,C,D,E,G,H,J,K,L}, closeList = {A,F,I}
依次类推,不断重复。一旦搜索到目标节点T,完成路径搜索,结束算法。
完成路径搜索后,从终点开始,向父节点移动,这样就被带回到了起点,这就是搜索后的路径。如下图所示。从起点 A 移动到终点 T就是简单从路径上的一个方格的中心移动到另一个方格的中心,直至目标。

代码实现
import os
import sys
import math
import heapq
import matplotlib.pyplot as pltclass AStar:"""AStar set the cost + heuristics as the priority"""def __init__(self, s_start, s_goal, heuristic_type,xI, xG):self.s_start = s_startself.s_goal = s_goalself.heuristic_type = heuristic_typeself.u_set = [(-1, 0), (0, 1), (1, 0), (0, -1)] # feasible input setself.obs = self.obs_map() # position of obstaclesself.OPEN = [] # priority queue / OPEN setself.CLOSED = [] # CLOSED set / VISITED orderself.PARENT = dict() # recorded parentself.g = dict() # cost to comeself.x_range = 51 # size of backgroundself.y_range = 31self.xI, self.xG = xI, xGself.obs = self.obs_map()def update_obs(self, obs):self.obs = obsdef animation(self, path, visited, name):self.plot_grid(name)self.plot_visited(visited)self.plot_path(path)plt.show()def plot_grid(self, name):obs_x = [x[0] for x in self.obs]obs_y = [x[1] for x in self.obs]plt.plot(self.xI[0], self.xI[1], "bs")plt.plot(self.xG[0], self.xG[1], "gs")plt.plot(obs_x, obs_y, "sk")plt.title(name)plt.axis("equal")def plot_visited(self, visited, cl='gray'):if self.xI in visited:visited.remove(self.xI)if self.xG in visited:visited.remove(self.xG)count = 0for x in visited:count += 1plt.plot(x[0], x[1], color=cl, marker='o')plt.gcf().canvas.mpl_connect('key_release_event',lambda event: [exit(0) if event.key == 'escape' else None])if count < len(visited) / 3:length = 20elif count < len(visited) * 2 / 3:length = 30else:length = 40## length = 15if count % length == 0:plt.pause(0.001)plt.pause(0.01)def plot_path(self, path, cl='r', flag=False):path_x = [path[i][0] for i in range(len(path))]path_y = [path[i][1] for i in range(len(path))]if not flag:plt.plot(path_x, path_y, linewidth='3', color='r')else:plt.plot(path_x, path_y, linewidth='3', color=cl)plt.plot(self.xI[0], self.xI[1], "bs")plt.plot(self.xG[0], self.xG[1], "gs")plt.pause(0.01)def update_obs(self, obs):self.obs = obsdef obs_map(self):"""Initialize obstacles' positions:return: map of obstacles"""x = 51y = 31obs = set()for i in range(x):obs.add((i, 0))for i in range(x):obs.add((i, y - 1))for i in range(y):obs.add((0, i))for i in range(y):obs.add((x - 1, i))for i in range(10, 21):obs.add((i, 15))for i in range(15):obs.add((20, i))for i in range(15, 30):obs.add((30, i))for i in range(16):obs.add((40, i))return obsdef searching(self):"""A_star Searching.:return: path, visited order"""self.PARENT[self.s_start] = self.s_startself.g[self.s_start] = 0self.g[self.s_goal] = math.infheapq.heappush(self.OPEN,(self.f_value(self.s_start), self.s_start))while self.OPEN:_, s = heapq.heappop(self.OPEN)self.CLOSED.append(s)if s == self.s_goal: # stop conditionbreakfor s_n in self.get_neighbor(s):new_cost = self.g[s] + self.cost(s, s_n)if s_n not in self.g:self.g[s_n] = math.infif new_cost < self.g[s_n]: # conditions for updating Costself.g[s_n] = new_costself.PARENT[s_n] = sheapq.heappush(self.OPEN, (self.f_value(s_n), s_n))return self.extract_path(self.PARENT), self.CLOSEDdef get_neighbor(self, s):"""find neighbors of state s that not in obstacles.:param s: state:return: neighbors"""return [(s[0] + u[0], s[1] + u[1]) for u in self.u_set]def cost(self, s_start, s_goal):"""Calculate Cost for this motion:param s_start: starting node:param s_goal: end node:return: Cost for this motion:note: Cost function could be more complicate!"""if self.is_collision(s_start, s_goal):return math.infreturn math.hypot(s_goal[0] - s_start[0], s_goal[1] - s_start[1])def is_collision(self, s_start, s_end):"""check if the line segment (s_start, s_end) is collision.:param s_start: start node:param s_end: end node:return: True: is collision / False: not collision"""if s_start in self.obs or s_end in self.obs:return Trueif s_start[0] != s_end[0] and s_start[1] != s_end[1]:if s_end[0] - s_start[0] == s_start[1] - s_end[1]:s1 = (min(s_start[0], s_end[0]), min(s_start[1], s_end[1]))s2 = (max(s_start[0], s_end[0]), max(s_start[1], s_end[1]))else:s1 = (min(s_start[0], s_end[0]), max(s_start[1], s_end[1]))s2 = (max(s_start[0], s_end[0]), min(s_start[1], s_end[1]))if s1 in self.obs or s2 in self.obs:return Truereturn Falsedef f_value(self, s):"""f = g + h. (g: Cost to come, h: heuristic value):param s: current state:return: f"""return self.g[s] + self.heuristic(s)def extract_path(self, PARENT):"""Extract the path based on the PARENT set.:return: The planning path"""path = [self.s_goal]s = self.s_goalwhile True:s = PARENT[s]path.append(s)if s == self.s_start:breakreturn list(path)def heuristic(self, s):"""Calculate heuristic.:param s: current node (state):return: heuristic function value"""heuristic_type = self.heuristic_type # heuristic typegoal = self.s_goal # goal nodeif heuristic_type == "manhattan":return abs(goal[0] - s[0]) + abs(goal[1] - s[1])else:return math.hypot(goal[0] - s[0], goal[1] - s[1])def main():s_start = (5, 5)s_goal = (45, 25)astar = AStar(s_start, s_goal, "euclidean",s_start,s_goal)path, visited = astar.searching()astar.animation(path, visited, "A*") # animationif __name__ == '__main__':main()
效果如下:

简单解析一下:
在获取起点后,算法维护了两个字典:
self.PARENT[self.s_start] = self.s_startself.g[self.s_start] = 0self.g[self.s_goal] = math.inf
PARENT字典中存取的是这个点由哪个点延伸出来的,即它的上一个节点是谁,用于最后的路径的返回;g这个字典中存储的是每个坐标的代价值,即g[s]。
然后,算法通过堆栈的概念维护了一个堆栈:
heapq.heappush(self.OPEN,(self.f_value(self.s_start), self.s_start))
将初始值的f[s]存储在这里,然后进行while循环:
首先从堆栈中取出栈顶元素:
_, s = heapq.heappop(self.OPEN)
注意到这里使用的heapq堆栈功能中的两个函数heapq.heappop与heapq.heappush。heappop会取出栈顶元素并将原始数据从堆栈中删除,而heappush则是对插入的数据按大小排序并存储在堆栈中。所以每一个遍历的点都会按照它的代价值放入堆栈中,同时每次取出的都是代价值最小的那个。
然后判断出栈顶元素是否为目标点,如果为目标点,则退出:
if s == self.s_goal: # stop conditionbreak
如果不是,则更新该点附近点的代价值:
for s_n in self.get_neighbor(s):for s_n in self.get_neighbor(s):new_cost = self.g[s] + self.cost(s, s_n)if s_n not in self.g:self.g[s_n] = math.infif new_cost < self.g[s_n]: # conditions for updating Costself.g[s_n] = new_costself.PARENT[s_n] = sheapq.heappush(self.OPEN, (self.f_value(s_n), s_n))
get_neighbor为获取该点周围的点的坐标。heappush入栈时需要存储的该点的代价值的计算方式为:
def f_value(self, s):"""f = g + h. (g: Cost to come, h: heuristic value):param s: current state:return: f"""return self.g[s] + self.heuristic(s)
其中self.g[s]为A算法中的g,self.heuristic(s)为A算法中的h。而作为一个启发函数,h的计算可以根据实际情况进行选择,例如在栅格地图中,计算h的方式一般可以分为两种:曼哈顿距离与欧几里德距离。
欧式距离是我们平时用的比较多的,即求两点之间的直线长度:
else:#sqrt(x^2+y^2)return math.hypot(goal[0] - s[0], goal[1] - s[1])
而曼哈顿距离相对不是那么普遍,简单的来说,就是找到一个当前点到终点的X方向需要走过的格子的数量以及Y方向需要走过的格子数量。:
if heuristic_type == "manhattan":return abs(goal[0] - s[0]) + abs(goal[1] - s[1])
应用这两种不同的计算方式,会得到不同的效果:
采用曼哈顿距离计算的结果:

采用欧式距离计算的结果:

可以看到采用不同的h的方式遍历的结果会有一定的差异。除此之外,在对周围点进行搜索的时候的点的选择也会对算法的遍历产生影响,例如上面的代码中u_set设置为:
self.u_set = [(-1, 0), (0, 1), (1, 0), (0, -1)] # feasible input set
即每个点只能搜索前后左右四个点。但是如果将其改为搜索8个点的话,得到的搜索结果就会变成:

至此,A*算法的简单原理整理完毕。
参考:
1、 十五个经典算法研究与总结(1)-A*搜索算法
2、【全局路径规划】A算法 A Search Algorithm
3、【路径规划】全局路径规划算法——A*算法(含python实现 | c++实现)
4、 路径规划之 A* 算法
相关文章:
A*算法图文详解
基本概念 A*算法最早于1964年在IEEE Transactions on Systems Science and Cybernetics中的论文《A Formal Basis for the Heuristic Determination of Minimum Cost Paths》中首次提出。其属于一种经典的启发式搜索方法,所谓启发式搜索,就在于当前搜索…...
[MySQL] — 数据类型和表的约束
目录 数据类型 数据类型分类 数值类型 tinyint类型 bit类型 小数类型 float decimal 字符串类型 char varchar char和varchar的区别 日期和时间类型 enum 和 set 表的约束 空属性 默认值 列描述 zeorfill 主键 创建表时在字段上指定主键 删除主键: 追…...
JetBrains IDE远程开发功能可供GitHub用户使用
JetBrains与GitHub去年已达成合作,提供GitHub Codespaces 与 JetBrains Gateway 之间的集成。 GitHub Codespaces允许用户创建安全、可配置、专属的云端开发环境,此集成意味着您可以通过JetBrains Gateway使用在 GitHub Codespaces 中运行喜欢的IDE进行…...
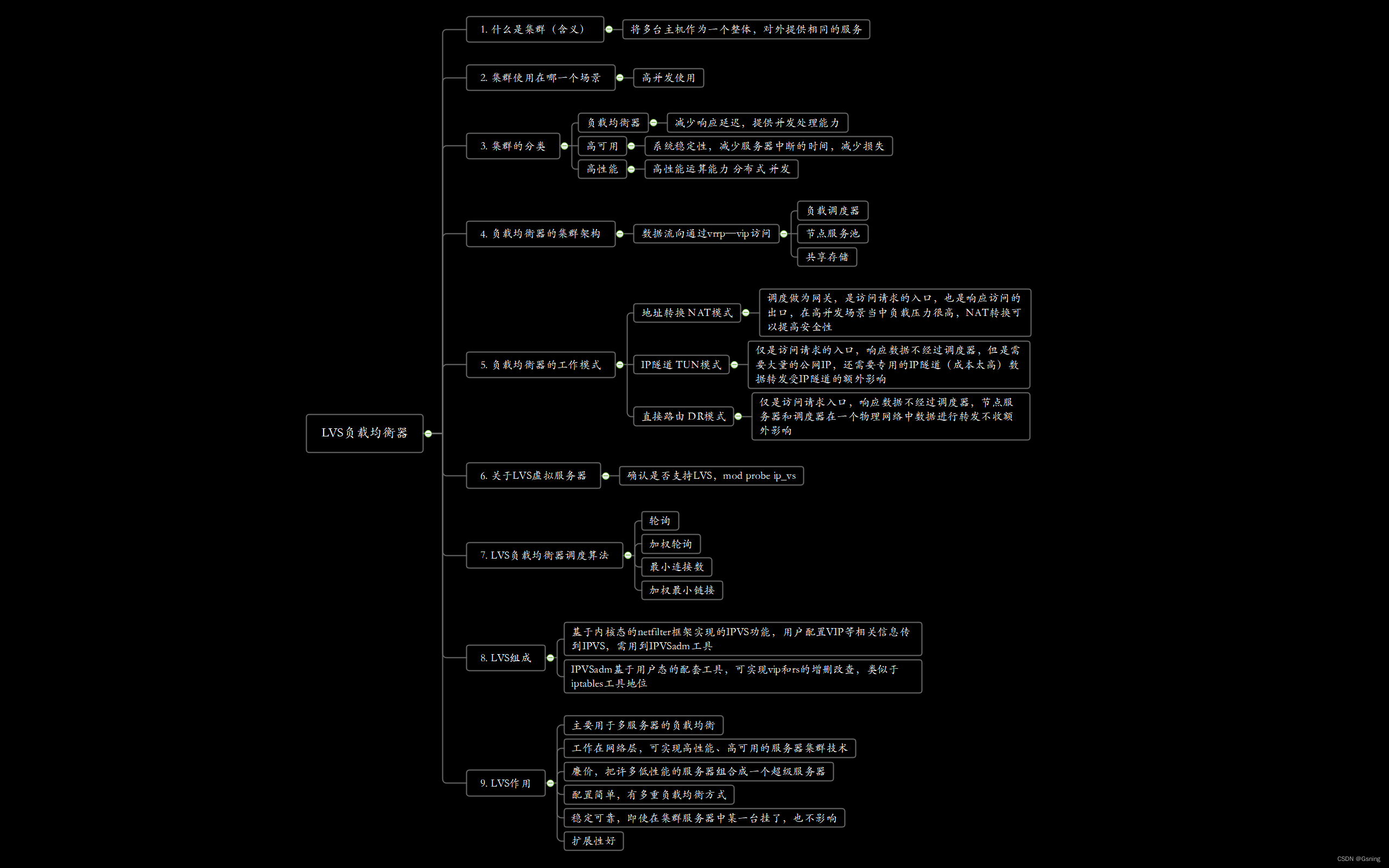
LVS 负载均衡集群
集群 集群(Cluster)是一组相互连接的计算机或服务器,它们通过网络一起工作以完成共同的任务或提供服务。集群的目标是通过将多台计算机协同工作,提高计算能力、可用性、性能和可伸缩性,适用于大量高并发的场景。 集群…...

Mongodb Ubuntu安装
Mongodb Ubuntu安装 1.更新软件源导入MongoDB的GPG密钥 sudo apt update sudo apt install -y dirmngr wget gnupg apt-transport-https ca-certificates software-properties-common gnupgwget -qO - https://www.mongodb.org/static/pgp/server-6.0.asc | sudo apt-key add…...
【Spring Boot 源码学习】自动装配流程源码解析(下)
自动装配流程源码解析(下) 引言往期内容主要内容4. 排除指定自动配置组件5. 过滤自动配置组件6. 触发自动配置事件 总结 引言 上篇博文,笔者带大家了解了自动装配流程中有关自动配置加载的流程; 本篇将介绍自动装配流程剩余的内…...

基于微信小程序的毕业设计题目200例
个人简介:7 年大厂程序员经历,擅长Java、微信小程序、Python、Android等,大家有这一块的问题可以一起交流! 各类成品 java毕设 。javaweb,ssh,ssm,springboot等等项目框架,源码丰富&…...

【数据管理】什么是数据管理?
文章目录 前言常见内容主题领域数据类型元数据引用数据主数据交易数据 数据类型的特点数据类型之间的关系GIGO数据质量评估 数据质量管理数据治理数据安全 前言 数据管理,即对数据资源的管理。按照 DAMA (国际数据管理协会)的定义࿱…...
[oneAPI] 手写数字识别-LSTM
[oneAPI] 手写数字识别-LSTM 手写数字识别参数与包加载数据模型训练过程结果 oneAPI 比赛:https://marketing.csdn.net/p/f3e44fbfe46c465f4d9d6c23e38e0517 Intel DevCloud for oneAPI:https://devcloud.intel.com/oneapi/get_started/aiAnalyticsToolk…...
通过css设置filter 属性,使整个页面呈现灰度效果,让整个网页变灰
通过css设置filter 属性设置页面整体置灰 效果图: 通过设置 filter 属性为 grayscale(100%),页面中的所有元素都会被应用灰色滤镜效果,使整个页面呈现灰度效果。 <style type"text/css"> html { filter: grayscale(100%); -webkit-f…...
)
ahooks.js:一款强大的React Hooks库及其API使用教程(一)
一、ahooks.js简介二、ahooks.js安装三、ahooks.js API介绍与使用教程1. useRequest2. useAntdTable3. useSize4. useBoolean5. useToggle6. useHover7. useDebounce8. useEventListener9. useFusionTable10. useKeyPress11. useLoading12. usePrevious13. useForm14. useUpdat…...
)
拟合圆算法源码(商业)
1、输入一些点 2、执行fitCircle算法 3、输出圆心(x,y)及半径r Box fitCircle(const std::vector<cv::Point2f>& points) {Box box;box.x = 0.0f;box.y = 0.0f;box.r = 0.0f;if (points.size() < 3){return box;}int i = 0;double X1 = 0;double Y1 = 0;doubl…...

第一章 IRIS 编程简介
文章目录 第一章 IRIS 编程简介简介ClassesRoutines 第一章 IRIS 编程简介 简介 IRIS 是一个高性能多模型数据平台,具有内置的通用编程语言 ObjectScript,以及对 Python 的内置支持。 IRIS 支持多进程并提供并发控制。每个进程都可以直接、高效地访问…...

Leetcode-每日一题【剑指 Offer 32 - III. 从上到下打印二叉树 III】
题目 请实现一个函数按照之字形顺序打印二叉树,即第一行按照从左到右的顺序打印,第二层按照从右到左的顺序打印,第三行再按照从左到右的顺序打印,其他行以此类推。 例如: 给定二叉树: [3,9,20,null,null,15,7], 3 / \ 9 20…...
.NET应用UI组件DevExpress XAF v23.1 - 全新的日程模块
DevExpress XAF是一款强大的现代应用程序框架,允许同时开发ASP.NET和WinForms。DevExpress XAF采用模块化设计,开发人员可以选择内建模块,也可以自行创建,从而以更快的速度和比开发人员当前更强有力的方式创建应用程序。 在新版中…...

UBuntu18.04 Qt之双HDMI屏切换
UBuntu18.04 Qt之双HDMI接2个4K屏并分别设置分辨率、主屏、副屏 一、设置HDMI-2为主屏 在main函数里面添加: #include "mainwindow.h" #include <QApplication>int main(int argc, char *argv[]) {QApplication a(argc, argv);{long nTotal 0;c…...

c#配置提供者
在 C# 中,配置系统是一种用于管理应用程序配置数据的机制。通常情况下,应用程序的配置数据包括连接字符串、应用程序设置、环境变量等。C# 配置系统允许您轻松地读取和使用这些配置数据,而不需要硬编码在代码中。 除了默认的配置提供者外,C# 配置系统还支持其他配置提供者…...
python rtsp 硬件解码 二
上次使用了python的opencv模块 述说了使用PyNvCodec 模块,这个模块本身并没有rtsp的读写,那么读写rtsp是可以使用很多方法的,我们为了输出到pytorch直接使用AI程序,简化rtsp 输入,可以直接使用ffmpeg的子进程 方法一 …...

搭载KaihongOS的工业平板、机器人、无人机等产品通过3.2版本兼容性测评,持续繁荣OpenHarmony生态
近日,搭载深圳开鸿数字产业发展有限公司(简称“深开鸿”)KaihongOS软件发行版的工业平板、机器人、无人机等商用产品均通过OpenAtom OpenHarmony(以下简称“OpenHarmony”)3.2 Release版本兼容性测评,获颁O…...

AIGC音视频工具分析和未来创新机会思考
编者按:相较于前两年,2023年音视频行业的使用量增长缓慢,整个音视频行业遇到瓶颈。音视频的行业从业者面临着相互竞争、不得不“卷”的状态。我们需要进行怎样的创新,才能从这种“卷”的状态中脱离出来?LiveVideoStack…...
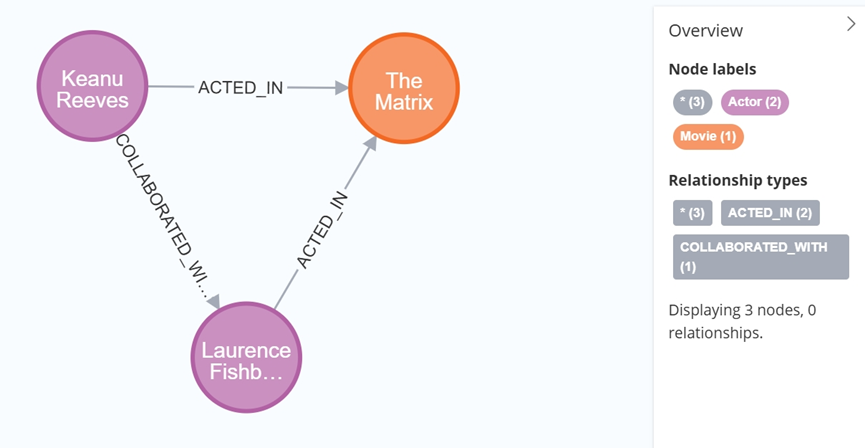
大数据学习栈记——Neo4j的安装与使用
本文介绍图数据库Neofj的安装与使用,操作系统:Ubuntu24.04,Neofj版本:2025.04.0。 Apt安装 Neofj可以进行官网安装:Neo4j Deployment Center - Graph Database & Analytics 我这里安装是添加软件源的方法 最新版…...
使用rpicam-app通过网络流式传输视频)
树莓派超全系列教程文档--(62)使用rpicam-app通过网络流式传输视频
使用rpicam-app通过网络流式传输视频 使用 rpicam-app 通过网络流式传输视频UDPTCPRTSPlibavGStreamerRTPlibcamerasrc GStreamer 元素 文章来源: http://raspberry.dns8844.cn/documentation 原文网址 使用 rpicam-app 通过网络流式传输视频 本节介绍来自 rpica…...

K8S认证|CKS题库+答案| 11. AppArmor
目录 11. AppArmor 免费获取并激活 CKA_v1.31_模拟系统 题目 开始操作: 1)、切换集群 2)、切换节点 3)、切换到 apparmor 的目录 4)、执行 apparmor 策略模块 5)、修改 pod 文件 6)、…...

R语言AI模型部署方案:精准离线运行详解
R语言AI模型部署方案:精准离线运行详解 一、项目概述 本文将构建一个完整的R语言AI部署解决方案,实现鸢尾花分类模型的训练、保存、离线部署和预测功能。核心特点: 100%离线运行能力自包含环境依赖生产级错误处理跨平台兼容性模型版本管理# 文件结构说明 Iris_AI_Deployme…...

云启出海,智联未来|阿里云网络「企业出海」系列客户沙龙上海站圆满落地
借阿里云中企出海大会的东风,以**「云启出海,智联未来|打造安全可靠的出海云网络引擎」为主题的阿里云企业出海客户沙龙云网络&安全专场于5.28日下午在上海顺利举办,现场吸引了来自携程、小红书、米哈游、哔哩哔哩、波克城市、…...
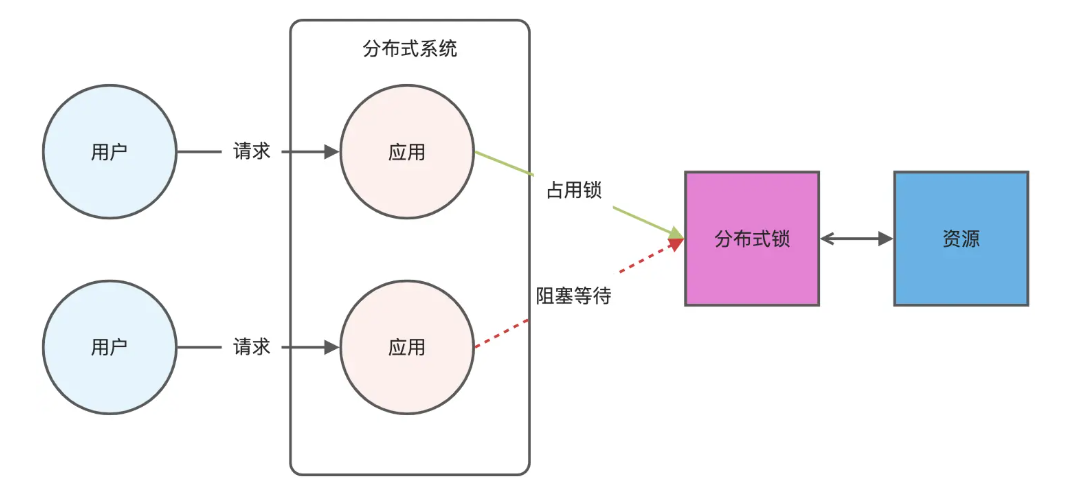
Redis相关知识总结(缓存雪崩,缓存穿透,缓存击穿,Redis实现分布式锁,如何保持数据库和缓存一致)
文章目录 1.什么是Redis?2.为什么要使用redis作为mysql的缓存?3.什么是缓存雪崩、缓存穿透、缓存击穿?3.1缓存雪崩3.1.1 大量缓存同时过期3.1.2 Redis宕机 3.2 缓存击穿3.3 缓存穿透3.4 总结 4. 数据库和缓存如何保持一致性5. Redis实现分布式…...

STM32F4基本定时器使用和原理详解
STM32F4基本定时器使用和原理详解 前言如何确定定时器挂载在哪条时钟线上配置及使用方法参数配置PrescalerCounter ModeCounter Periodauto-reload preloadTrigger Event Selection 中断配置生成的代码及使用方法初始化代码基本定时器触发DCA或者ADC的代码讲解中断代码定时启动…...

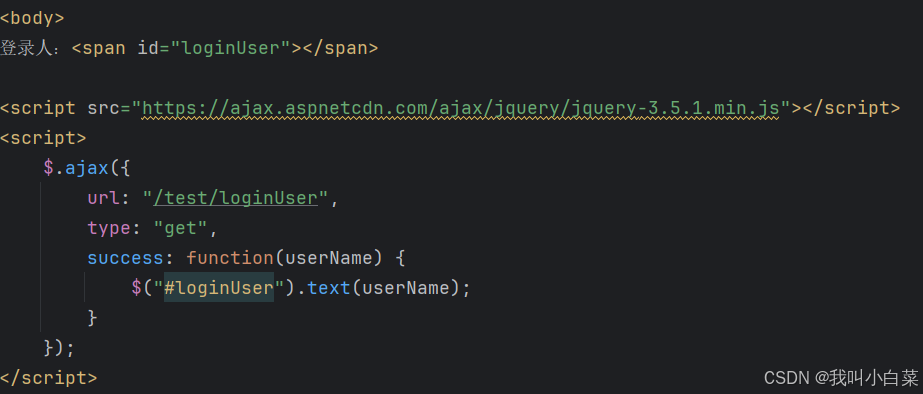
SpringBoot+uniapp 的 Champion 俱乐部微信小程序设计与实现,论文初版实现
摘要 本论文旨在设计并实现基于 SpringBoot 和 uniapp 的 Champion 俱乐部微信小程序,以满足俱乐部线上活动推广、会员管理、社交互动等需求。通过 SpringBoot 搭建后端服务,提供稳定高效的数据处理与业务逻辑支持;利用 uniapp 实现跨平台前…...
【Java_EE】Spring MVC
目录 Spring Web MVC 编辑注解 RestController RequestMapping RequestParam RequestParam RequestBody PathVariable RequestPart 参数传递 注意事项 编辑参数重命名 RequestParam 编辑编辑传递集合 RequestParam 传递JSON数据 编辑RequestBody …...

OPENCV形态学基础之二腐蚀
一.腐蚀的原理 (图1) 数学表达式:dst(x,y) erode(src(x,y)) min(x,y)src(xx,yy) 腐蚀也是图像形态学的基本功能之一,腐蚀跟膨胀属于反向操作,膨胀是把图像图像变大,而腐蚀就是把图像变小。腐蚀后的图像变小变暗淡。 腐蚀…...