Android通过OpenCV实现相机标定
在 Android 中使用 OpenCV 实现相机标定,你可以按照以下步骤进行操作:
-
首先,确保你已经在项目中引入了 OpenCV 库的依赖。
-
创建一个 CameraCalibrator 类,用于执行相机标定。
import org.opencv.calib3d.Calib3dimport org.opencv.core.CvType.CV_32Fimport org.opencv.core.CvType.CV_64Fimport org.opencv.core.Matimport org.opencv.core.MatOfPoint2fimport org.opencv.core.MatOfPoint3fimport org.opencv.core.Sizeclass CameraCalibrator {private val objectPoints = ArrayList<Mat>()private val imagePoints = ArrayList<Mat>()private var imageSize = Size()var cameraMatrix = Mat(3, 3, CV_64F)private var distortionCoefficients = Mat(5, 1, CV_64F)// 添加一组图像点和对应的物理世界点fun addObjectPoint(objectPoint: Mat) {objectPoints.add(objectPoint)}fun addImagePoint(imagePoint: Mat) {imagePoints.add(imagePoint)}执行相机标定fun calibrate(): Mat? {val rotationVectors = ArrayList<Mat>()val translationVectors = ArrayList<Mat>()val rms = Calib3d.calibrateCamera(objectPoints,imagePoints,imageSize,cameraMatrix,distortionCoefficients,rotationVectors,translationVectors)if (rms < 1.0) {return cameraMatrix}return null}// 获取相机矩阵fun getCameraMatrix(): Mat {return cameraMatrix}// 获取畸变系数fun getDistortionCoefficients(): Mat {return distortionCoefficients}fun setImageSize(width: Int, height: Int) {imageSize = Size(width.toDouble(), height.toDouble())}} -
通过Camera2获取到帧数据后转成灰度图Mat,创建一个 CameraCalibrator 对象,添加物理世界点和图像点
fun startCalib(){calibrator = CameraCalibrator()GlobalScope.launch(Dispatchers.IO) {var grayMat = Mat(CameraUtil.cameraH, CameraUtil.cameraW, CvType.CV_8UC1);grayMat.put(0,0,data)addPoint(grayMat)}}fun addPoint(grayImage:Mat){Log.i(TAG,"addPointstart")val corners = MatOfPoint2f()val patternSize = Size(11.0, 8.0) // 棋盘格的内角点数目val found = Calib3d.findChessboardCorners(grayImage, patternSize, corners,Calib3d.CALIB_CB_ADAPTIVE_THRESH or Calib3d.CALIB_CB_NORMALIZE_IMAGE)if (found) {Log.i(TAG,"addPointend found")// 添加图像点和物理世界点val objectPoints = MatOfPoint3f()for (i in 0 until patternSize.height.toInt()) {for (j in 0 until patternSize.width.toInt()) {objectPoints.push_back(MatOfPoint3f(Point3(j.toDouble(), i.toDouble(), 0.0)))}}calibrator?.addObjectPoint(objectPoints)calibrator?.addImagePoint(corners)}Log.i(TAG,"addPointend")stopCabin()} -
执行相机标定,并获取相机矩阵和畸变系数
fun stopCabin(){Log.i(TAG,"stopCabin")calibrator?.setImageSize(1920, 1080)val cameraMatrix = calibrator?.calibrate()val distortionCoefficients = calibrator?.getDistortionCoefficients()if (cameraMatrix != null) {// 标定成功,可以使用相机矩阵进行后续处理//查看相机的内参(相机矩阵),你可以获取 cameraMatrix 输出的 Mat 对象,并使用 OpenCV 提供的函数来解析和显示其内容//将 cameraMatrix 转换为双精度数组val cameraMatrixArray = DoubleArray(9)cameraMatrix.get(0, 0, cameraMatrixArray)Log.i(TAG,"相机内参 = "+cameraMatrixArray.contentToString())} else {// 标定失败,请检查标定图像和参数设置}} -
Calib3d.calibrateCamera() 方法用于相机标定,它接受多个参数来执行标定过程。下面是各个参数的含义:
objectPoints:一个 ArrayList 对象,存储了多个棋盘格的物理世界坐标点。每个 Mat 对象表示一个图像对应的物理世界坐标点。该参数用于指定棋盘格的内角点在物理世界中的坐标。
imagePoints:一个 ArrayList 对象,存储了多个棋盘格的图像坐标点。每个 Mat 对象表示一个图像中检测到的棋盘格的内角点坐标。该参数用于指定棋盘格的内角点在图像中的坐标。
imageSize:一个 Size 对象,指定图像的大小(宽度和高度)。该参数用于指定输入图像的尺寸。
cameraMatrix:一个 Mat 对象,用于存储输出的相机矩阵。相机矩阵包含了相机的内参,如焦距和光心坐标等信息。
distortionCoefficients:一个 Mat 对象,用于存储输出的畸变系数。畸变系数描述了相机的畸变情况,包括径向畸变和切向畸变等。
rotationVectors:一个 ArrayList 对象,用于存储输出的旋转向量。每个旋转向量表示了相机在捕获每张图像时的姿态信息。
translationVectors:一个 ArrayList 对象,用于存储输出的平移向量。每个平移向量表示了相机在捕获每张图像时的位置信息。
返回值是一个浮点数,表示标定的均方根误差(RMSE),用于评估标定结果的准确度。
请注意,为了将参数传递到 Calib3d.calibrateCamera() 方法中,你需要正确地创建和填充这些参数。特别是 objectPoints 和 imagePoints,它们应该包含正确的物理世界坐标和图像坐标。
相关文章:

Android通过OpenCV实现相机标定
在 Android 中使用 OpenCV 实现相机标定,你可以按照以下步骤进行操作: 首先,确保你已经在项目中引入了 OpenCV 库的依赖。 创建一个 CameraCalibrator 类,用于执行相机标定。 import org.opencv.calib3d.Calib3dimport org.open…...

我们可能要为ChatGPT的谢幕做好准备
ChatGPT的未来:悬念仍存 人工智能已经成为我们生活不可或缺的一部分。在众多AI应用中,OpenAI研发的ChatGPT凭借其极强的语言理解和生成能力脱颖而出,是一项划时代的变革性创新,帮助了无数企业和个人,改变了我们与技…...

深入浅出Pytorch函数——torch.nn.init.xavier_normal_
分类目录:《深入浅出Pytorch函数》总目录 相关文章: 深入浅出Pytorch函数——torch.nn.init.calculate_gain 深入浅出Pytorch函数——torch.nn.init.uniform_ 深入浅出Pytorch函数——torch.nn.init.normal_ 深入浅出Pytorch函数——torch.nn.init.c…...

Abandon_Ubuntu Declaration
鉴于以下几个原因,持续到明年考研结束,我将不再捣鼓ubuntu和任何linux系统, 原因如下: ubuntu23.04不支持wps编辑pdf这个核心功能,且开机向canonial公司发送远程遥测,暂时不会用iptables禁用,故…...
Java设计模式-抽象工厂模式
简介 设计模式是软件设计中的一种常见方法,通过定义一系列通用的解决方案,来解决常见的软件设计问题。其中,抽象工厂模式是一种非常常见的设计模式,它可以帮助我们创建一组相关的对象,而不需要指定具体的实现方式。 …...
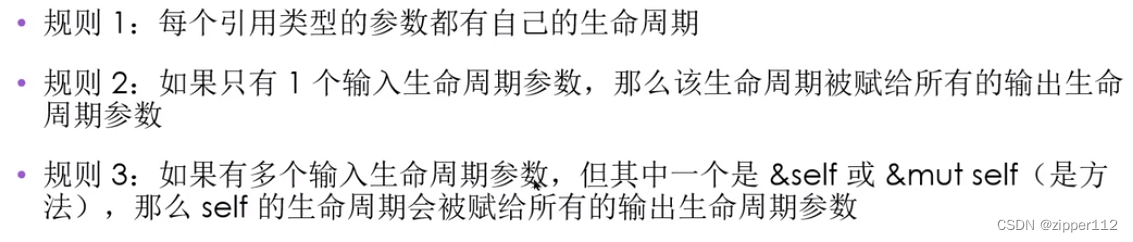
Rust语法:所有权引用生命周期
文章目录 所有权垃圾回收管理内存手动管理内存Rust的所有权所有权转移函数所有权传递 引用与借用可变与不可变引用 生命周期悬垂引用函数生命周期声明结构体的生命周期声明Rust生命周期的自行推断生命周期约束静态生命周期 所有权 垃圾回收管理内存 Python,Java这…...
办手机卡/流量卡需要问清楚啥?
网上的手机卡一搜能出现千千万,那么怎么才能避免购买到那些套路卡呢?今天就给大家分享一下,办理手机卡时需要问清楚什么? 办理流量卡需要咨询的五大问题,下面开始进入正题。 1、是否是正规号卡?正规的号…...

vim基本使用方法
VIM 1.vim介绍2.vim基本操作2.1 模式切换2.2 命令模式2.3 底行模式 1.vim介绍 vim是linux上一个有多个编辑模式的编辑器。 这里主要介绍三种模式: 命令模式(Normal mode) 执行命令的模式,主要任务就是控制光标移动、复制和删除。…...
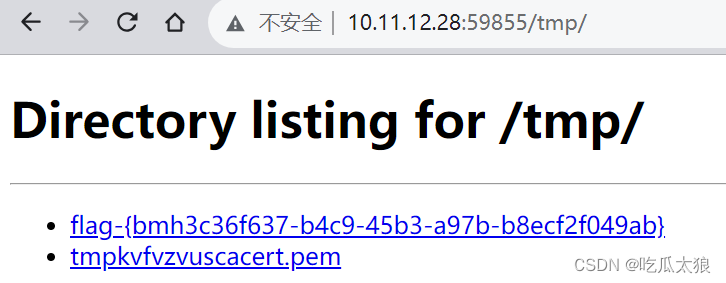
漏洞指北-VulFocus靶场专栏-入门
漏洞指北-VulFocus靶场01-入门 VulFocus靶场前置条件:入门001 命令执行漏洞step1: 输入默认index的提示step2: 入门002 目录浏览漏洞step1:进入默认页面,找到tmp目录step2 进入tmp目录获取flag文件 VulFocus靶场前置条…...

管理类联考——逻辑——真题篇——按知识分类——汇总篇——二、论证逻辑——推论——第二节——数字推理题
文章目录 第二节 数字推理题真题(2017-31)——推论——数字推理题——数量比例模型真题(2014-33)——推论——数字推理题——数量比例模型——(1)若题干既有数量,也有比例,答案一般为数量。(2)若题干只有比例没有数量,答案一般为比例。真题(2018-44)——推论——数…...
 git reflog查看引用日志)
git基础教程(24) git reflog查看引用日志
文章目录 1、`git reflog`命令说明2、`git reflog`命令显示内容3、具体的用法4、引起ref变化的操作有git reflog 命令是用来恢复本地错误操作很重要的一个命令,所以在这里对它进行一下整理。 1、git reflog命令说明 reflog翻译:Reference logs(参考日志) git reflog命令:…...
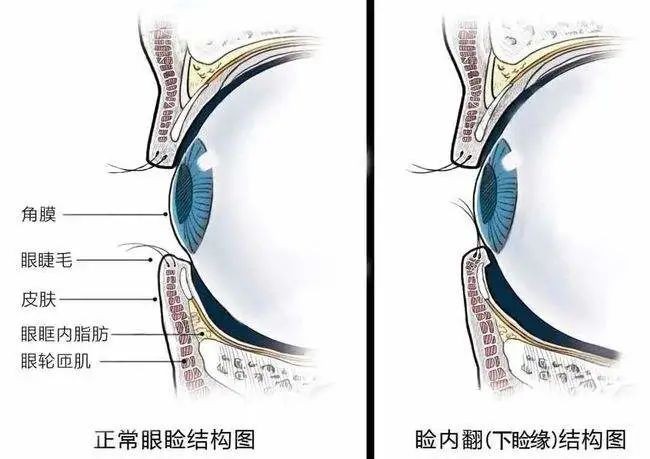
成都爱尔谭娇主任提醒孩子不停揉眼睛是因为什么
孩子总是揉眼睛, 明显眼睛不舒服, 但看着好像没什么? 可孩子不停眨眼流泪, 肯定不对…… 孩子到底怎么了? 孩子可能长了“倒睫”! 孩子出现倒睫毛就是睫毛不朝外长而向内长,是婴幼儿很容易患的一种眼病。 由于孩子的脸颊及鼻梁发…...

医疗设备管理软件哪家好?医院设备全生命周期管理要怎么做?
随着医学技术的不断进步,医疗设备变得越来越先进,越来越复杂。因此,医疗设备的管理也变得越来越重要。传统的医疗设备管理方式存在很多问题,比如设备数据难统计、报修方式难统一、巡检维保难规范等。为了解决这些问题,…...
基于PaddlePaddle实现的声纹识别系统
前言 本项目使用了EcapaTdnn、ResNetSE、ERes2Net、CAM等多种先进的声纹识别模型,不排除以后会支持更多模型,同时本项目也支持了MelSpectrogram、Spectrogram、MFCC、Fbank等多种数据预处理方法,使用了ArcFace Loss,ArcFace loss…...
使用GDB工具分析core文件的方法
引言: 在软件开发过程中,我们经常会遇到程序崩溃或异常退出的情况。这时,一个非常有用的工具就是GDB(GNU调试器),它可以帮助我们分析core文件并找出导致程序崩溃的原因。本文将介绍如何使用GDB工具来分析c…...

Maven - 统一构建规范:Maven 插件管理最佳实践
文章目录 Available Plugins开源项目中的使用插件介绍maven-jar-pluginmaven-assembly-pluginmaven-shade-pluginShade 插件 - 标签artifactSetrelocationsfilters 完整配置 Available Plugins https://maven.apache.org/plugins/index.html Maven 是一个开源的软件构建工具&…...

对接海康明眸门禁设备-删除人员信息
对接海康明眸门禁设备-删除人员信息 文中登录 退出登录 长连接和海康hCNetSDK等接口 见文章 初始SDK和登录 /*** 删除人脸 IotCommDataResult 自定义类 收集结果*/Overridepublic List<IotCommDataResult> deleteFace(IotCameraParam camera, Collection<Long> us…...
LEADTOOLS Imaging SDK Crack
LEADTOOLS Imaging SDK Crack 高级开发人员工具包包括ActiveX和WPF/XAML控件。 LEADTOOLS Imaging SDK为文件格式导入/导出、图像压缩、图像显示和效果、颜色转换、图像处理、TWAIN扫描、图像通用对话框、数据库集成、打印和互联网提供了基本和高级的彩色图像功能。 LEADTOOLS …...

2023并发之八股文——面试题
基础知识 并发编程的优缺点为什么要使用并发编程(并发编程的优点) 充分利用多核CPU的计算能力:通过并发编程的形式可以将多核CPU 的计算能力发挥到极致,性能得到提升方便进行业务拆分,提升系统并发能力和性能&#x…...

操作记录日志保存设计实现
定义一个切面类 @Aspect @Slf4j @Component @RequiredArgsConstructor public class OperateLogAopConfig {private final ISysOperateLogService sysOperateLogService;@Around("@annotation(operateLog)")public Object operateLog(ProceedingJoinPoint point, Op…...
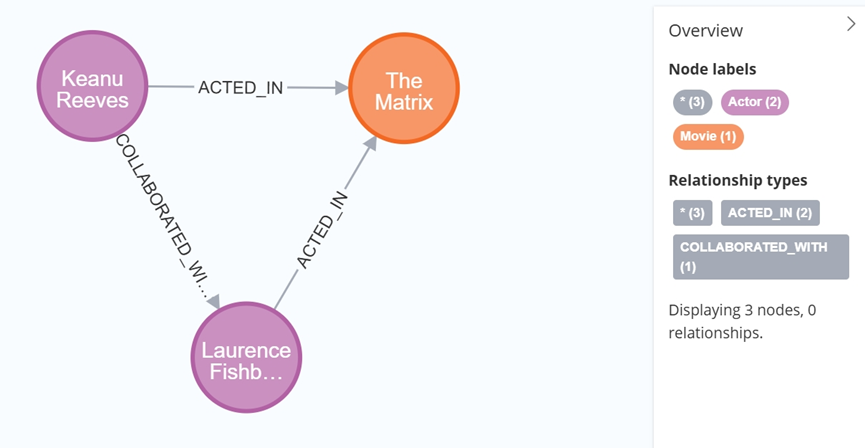
大数据学习栈记——Neo4j的安装与使用
本文介绍图数据库Neofj的安装与使用,操作系统:Ubuntu24.04,Neofj版本:2025.04.0。 Apt安装 Neofj可以进行官网安装:Neo4j Deployment Center - Graph Database & Analytics 我这里安装是添加软件源的方法 最新版…...

关于iview组件中使用 table , 绑定序号分页后序号从1开始的解决方案
问题描述:iview使用table 中type: "index",分页之后 ,索引还是从1开始,试过绑定后台返回数据的id, 这种方法可行,就是后台返回数据的每个页面id都不完全是按照从1开始的升序,因此百度了下,找到了…...

质量体系的重要
质量体系是为确保产品、服务或过程质量满足规定要求,由相互关联的要素构成的有机整体。其核心内容可归纳为以下五个方面: 🏛️ 一、组织架构与职责 质量体系明确组织内各部门、岗位的职责与权限,形成层级清晰的管理网络…...
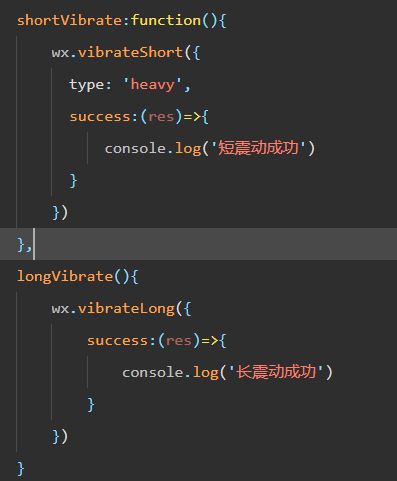
微信小程序 - 手机震动
一、界面 <button type"primary" bindtap"shortVibrate">短震动</button> <button type"primary" bindtap"longVibrate">长震动</button> 二、js逻辑代码 注:文档 https://developers.weixin.qq…...

python如何将word的doc另存为docx
将 DOCX 文件另存为 DOCX 格式(Python 实现) 在 Python 中,你可以使用 python-docx 库来操作 Word 文档。不过需要注意的是,.doc 是旧的 Word 格式,而 .docx 是新的基于 XML 的格式。python-docx 只能处理 .docx 格式…...

解决本地部署 SmolVLM2 大语言模型运行 flash-attn 报错
出现的问题 安装 flash-attn 会一直卡在 build 那一步或者运行报错 解决办法 是因为你安装的 flash-attn 版本没有对应上,所以报错,到 https://github.com/Dao-AILab/flash-attention/releases 下载对应版本,cu、torch、cp 的版本一定要对…...

OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别
OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别 直接训练提示词嵌入向量的核心区别 您提到的代码: prompt_embedding = initial_embedding.clone().requires_grad_(True) optimizer = torch.optim.Adam([prompt_embedding...

06 Deep learning神经网络编程基础 激活函数 --吴恩达
深度学习激活函数详解 一、核心作用 引入非线性:使神经网络可学习复杂模式控制输出范围:如Sigmoid将输出限制在(0,1)梯度传递:影响反向传播的稳定性二、常见类型及数学表达 Sigmoid σ ( x ) = 1 1 +...

Rapidio门铃消息FIFO溢出机制
关于RapidIO门铃消息FIFO的溢出机制及其与中断抖动的关系,以下是深入解析: 门铃FIFO溢出的本质 在RapidIO系统中,门铃消息FIFO是硬件控制器内部的缓冲区,用于临时存储接收到的门铃消息(Doorbell Message)。…...
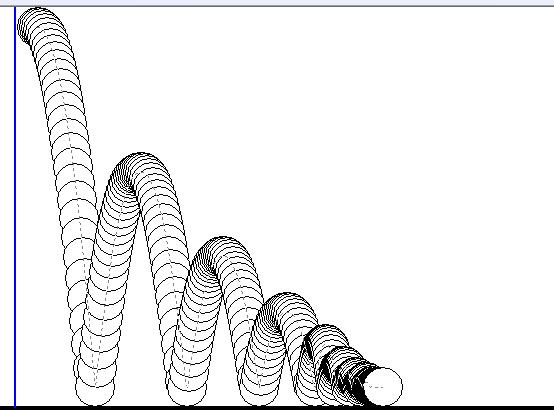
MFC 抛体运动模拟:常见问题解决与界面美化
在 MFC 中开发抛体运动模拟程序时,我们常遇到 轨迹残留、无效刷新、视觉单调、物理逻辑瑕疵 等问题。本文将针对这些痛点,详细解析原因并提供解决方案,同时兼顾界面美化,让模拟效果更专业、更高效。 问题一:历史轨迹与小球残影残留 现象 小球运动后,历史位置的 “残影”…...