点云平面拟合和球面拟合
一、介绍
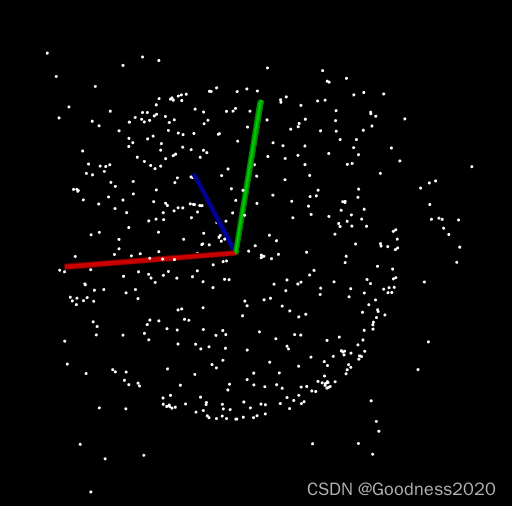
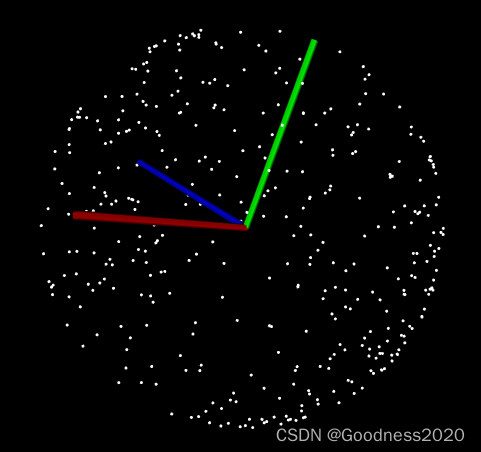
In this tutorial we learn how to use a RandomSampleConsensus with a plane model to obtain the cloud fitting to this model.
二、代码
#include <iostream>
#include <thread>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/point_cloud.h>
#include <pcl/sample_consensus/ransac.h>
#include <pcl/sample_consensus/sac_model_plane.h>
#include <pcl/sample_consensus/sac_model_sphere.h>
#include <pcl/visualization/pcl_visualizer.h>using namespace std::chrono_literals;pcl::visualization::PCLVisualizer::Ptr simpleVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));viewer->setBackgroundColor(0, 0, 0);viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");viewer->addCoordinateSystem (1.0, "global");viewer->initCameraParameters();return (viewer);
}void ranFit()
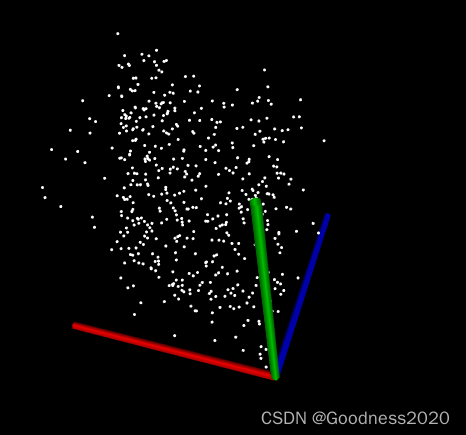
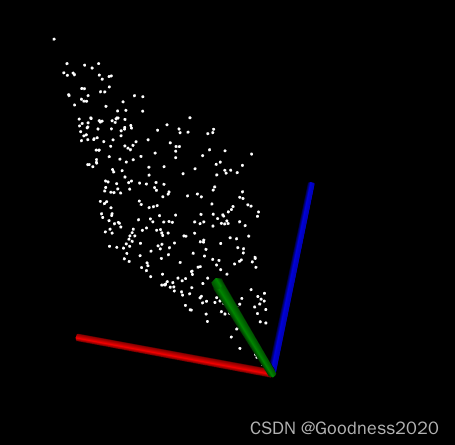
{bool is_plane = true;bool is_show_final = false;pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr final(new pcl::PointCloud<pcl::PointXYZ>);cloud->width = 500;cloud->height = 1;cloud->is_dense = false;cloud->points.resize(cloud->width * cloud->height);for (int i = 0; i < cloud->size(); ++i){if (is_plane==false){// x*x+y*y+z*z=1(*cloud)[i].x = 2.0 * rand() / (RAND_MAX + 1.0) - 1.0;(*cloud)[i].y = 2.0 * rand() / (RAND_MAX + 1.0) - 1.0;if ((*cloud)[i].x * (*cloud)[i].x + ((*cloud)[i].y * (*cloud)[i].y) > 1)(*cloud)[i].z = 2.0 * rand() / (RAND_MAX + 1.0) - 1.0;else if (i % 2 == 0)(*cloud)[i].z = sqrt(1 - ((*cloud)[i].x * (*cloud)[i].x) - ((*cloud)[i].y * (*cloud)[i].y));else(*cloud)[i].z = -sqrt(1 - ((*cloud)[i].x * (*cloud)[i].x) - ((*cloud)[i].y * (*cloud)[i].y));}else{// 0.5x+0.5y-z=0(*cloud)[i].x = rand() / (RAND_MAX + 1.0);(*cloud)[i].y = rand() / (RAND_MAX + 1.0);if (i % 3 == 0)(*cloud)[i].z = rand() / (RAND_MAX + 1.0);else(*cloud)[i].z = 0.5 * (*cloud)[i].x + 0.5 * (*cloud)[i].y;}}std::vector<int> inliers;std::vector<int> outliers;pcl::SampleConsensusModelSphere<pcl::PointXYZ>::Ptrmodel_s(new pcl::SampleConsensusModelSphere<pcl::PointXYZ>(cloud));pcl::SampleConsensusModelPlane<pcl::PointXYZ>::Ptrmodel_p(new pcl::SampleConsensusModelPlane<pcl::PointXYZ>(cloud));Eigen::VectorXf coef;if (is_plane){pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_p);ransac.setDistanceThreshold(.01);ransac.computeModel();ransac.getInliers(inliers);ransac.getModelCoefficients(coef);}else{pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_s);ransac.setDistanceThreshold(.01);ransac.computeModel();ransac.getInliers(inliers);ransac.getModelCoefficients(coef);}std::cout << coef << std::endl;pcl::copyPointCloud(*cloud, inliers, *final);pcl::visualization::PCLVisualizer::Ptr viewer;if (is_show_final)viewer = simpleVis(final);elseviewer = simpleVis(cloud);while (!viewer->wasStopped()){viewer->spinOnce(100);std::this_thread::sleep_for(100ms);}
}int main()
{ranFit();return (0);
}
三、参考
How to use Random Sample Consensus model — Point Cloud Library 0.0 documentation
相关文章:
点云平面拟合和球面拟合
一、介绍 In this tutorial we learn how to use a RandomSampleConsensus with a plane model to obtain the cloud fitting to this model. 二、代码 #include <iostream> #include <thread> #include <pcl/point_types.h> #include <pcl/common/io.…...
部署问题集合(十九)linux设置Tomcat、Docker,以及使用脚本开机自启(亲测)
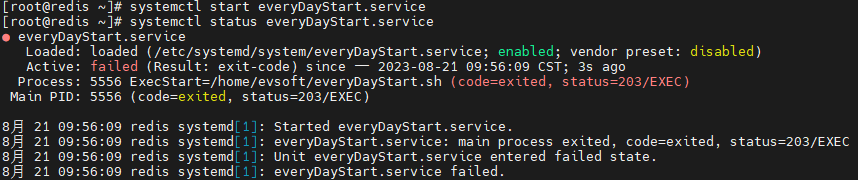
前言 因为不想每次启动虚拟机都要手动启动一遍这些东西,所以想要设置成开机自启的状态 设置Tomcat开机自启 创建service文件 vi /etc/systemd/system/tomcat.service添加如下内容,注意修改启动脚本和关闭脚本的地址 [Unit] DescriptionTomcat9068 A…...
视觉SLAM:一直在入门,如何能精通,CV领域的绝境长城,
目录 前言 福利:文末有chat-gpt纯分享,无魔法,无限制 1 什么是SLAM? 2 为什么用SLAM? 3 视觉SLAM怎么实现? 4 前端视觉里程计 5 后端优化 6 回环检测 7 地图构建 8 结语 前言 上周的组会上&…...

【报错】yarn --version Unrecognized option: --version Error...
文章目录 问题分析解决问题 在使用 npm install -g yarn 全局安装 yarn 后,查看yarn 的版本号,报错如下 PS D:\global-data-display> yarn --version Unrecognized option: --version Error: Could...
二叉搜索树的(查找、插入、删除)
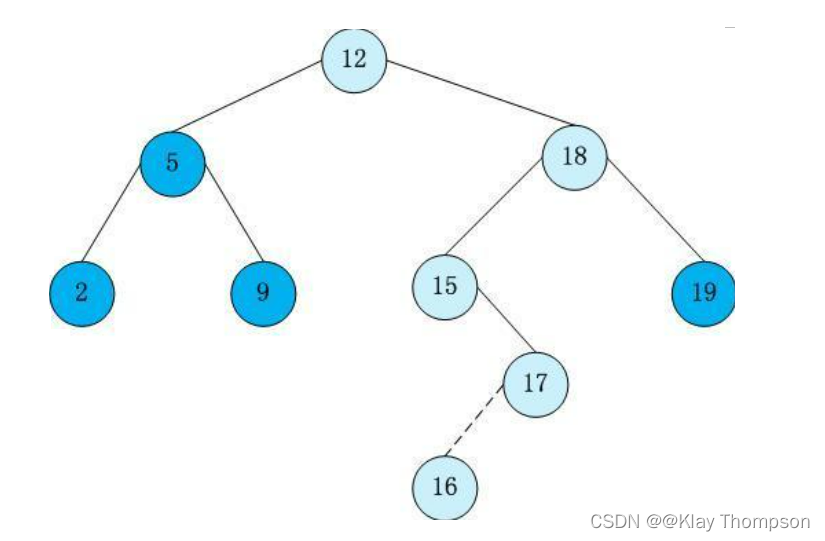
一、二叉搜索树的概念 二叉搜索树又称二叉排序树,它或者是一棵空树,或者是具有以下性质的二叉树: 1、若它的左子树不为空,则左子树上所有节点的值都小于根节点的值; 2、若它的右子树不为空,则右子树上所有节点的值都…...

电力虚拟仿真 | 高压电气试验VR教学系统
在科技进步的推动下,我们的教育方式也在发生着翻天覆地的变化。其中,虚拟现实(VR)技术的出现,为我们提供了一种全新的、富有沉浸感的学习和培训方式。特别是在电力行业领域,例如,电力系统的维护…...

innovus如何设置size only
我正在「拾陆楼」和朋友们讨论有趣的话题,你⼀起来吧? 拾陆楼知识星球入口 给instance设置size only属性命令如下: dbset [dbGet top.inst.name aa/bb -p] .dontTouch sizeOk 给一个module设置size only需要foreach循环一下: foreach inst [dbGet top.…...

Java之继承详解二
3.7 方法重写 3.7.1 概念 方法重写 :子类中出现与父类一模一样的方法时(返回值类型,方法名和参数列表都相同),会出现覆盖效果,也称为重写或者复写。声明不变,重新实现。 3.7.2 使用场景与案例…...
国内常见的几款可视化Web组态软件
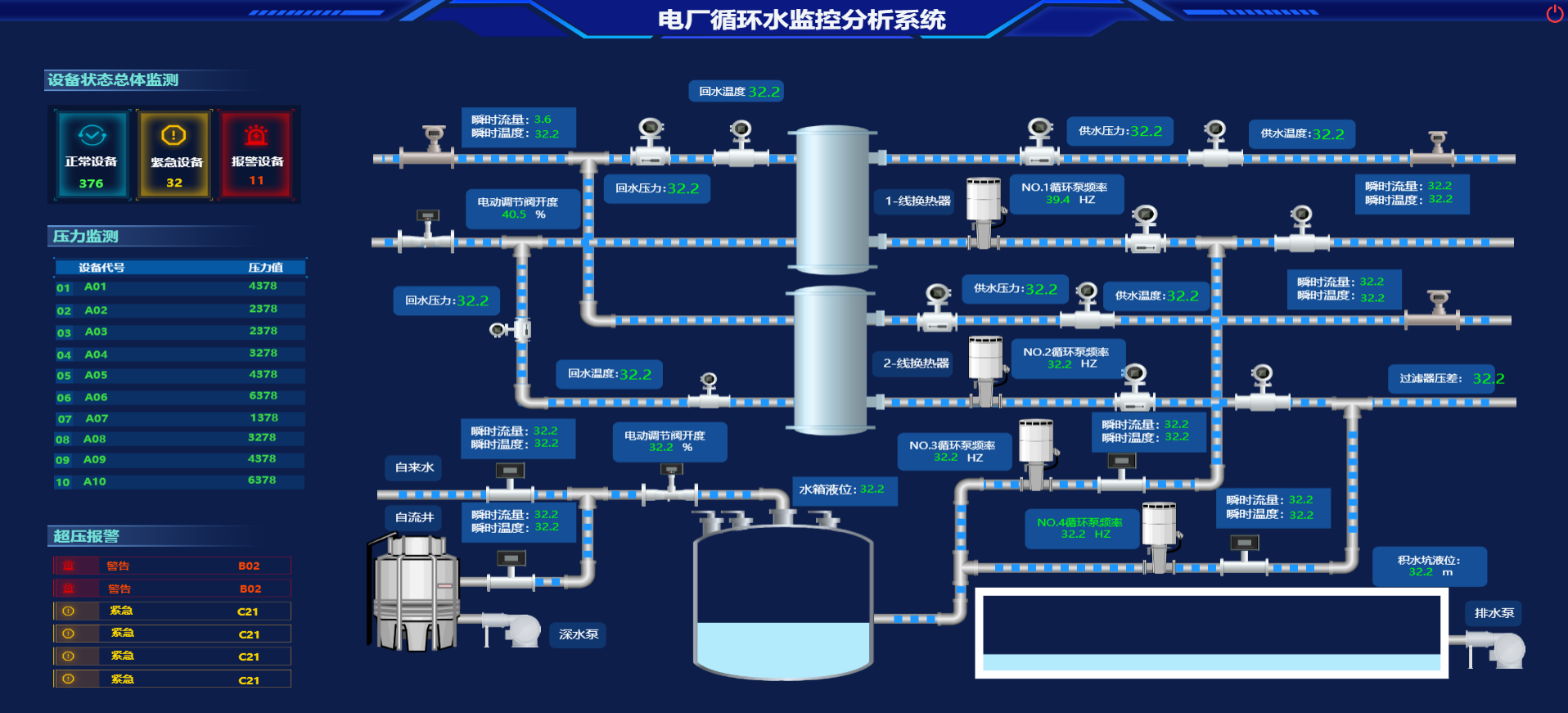
组态软件是一种用于控制和监控各种设备的软件,也是指在自动控制系统监控层一级的软件平台和开发环境。这类软件实际上也是一种通过灵活的组态方式,为用户提供快速构建工业自动控制系统监控功能的、通用层次的软件工具。通常用于工业控制,自动…...
通过 git上传到 gitee 仓库
介绍 Git是目前世界上最先进的分布式版本控制系统,有这么几个特点: 分布式 :是用来保存工程源代码历史状态的命令行工具。保存点 :保存点可以追溯源码中的文件,并能得到某个时间点上的整个工程项目额状态;…...

设置Windows主机的浏览器为wls2的默认浏览器
1. 准备工作 wsl是可以使用Windows主机上安装的exe程序,出于安全考虑,默认情况下改功能是无法使用。要使用的话,终端需要以管理员权限启动。 我这里以Windows Terminal为例,介绍如何默认使用管理员权限打开终端,具体…...
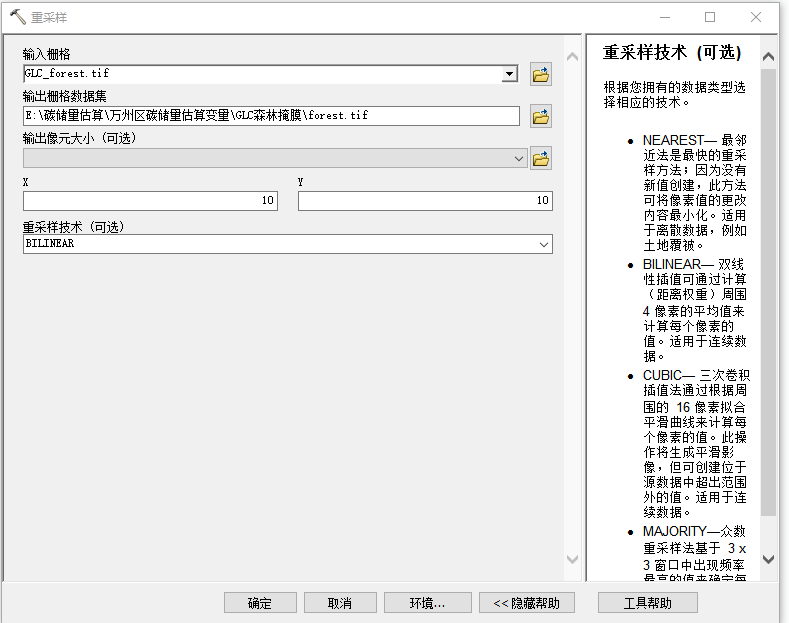
森林生物量(蓄积量)估算全流程
python森林生物量(蓄积量)估算全流程 一.哨兵2号获取/去云处理/提取参数1.1 影像处理与下载1.2 导入2A级产品1.3导入我们在第1步生成的云掩膜文件1.4.SNAP掩膜操作1.5采用gdal计算各类植被指数1.6 纹理特征参数提取 二.哨兵1号获取/处理/提取数据2.1 纹理…...
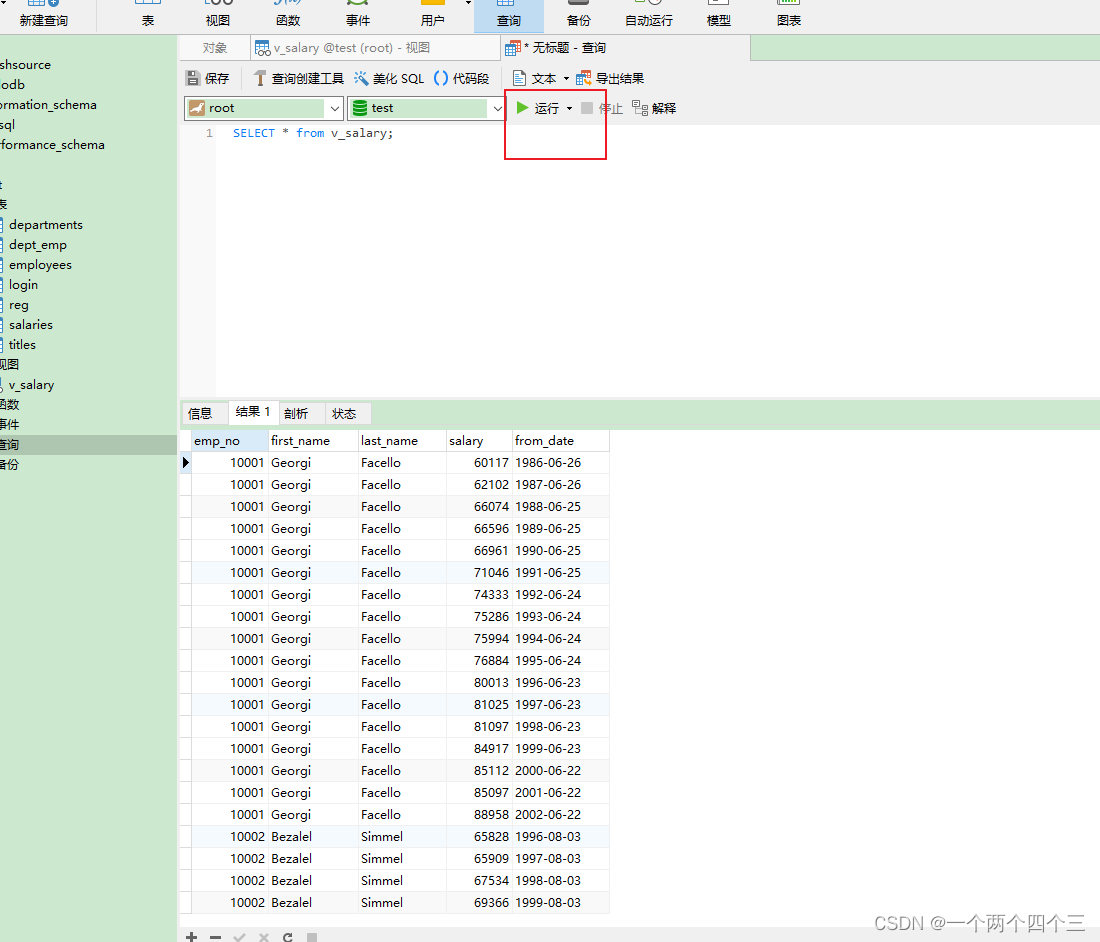
MySQL数据库概述
MySQL数据库概述 1 SQL SQL语句大小写不敏感。 SQL语句末尾应该使用分号结束。 1.1 SQL语句及相关操作示例 DDL:数据定义语言,负责数据库定义、数据库对象定义,由CREATE、ALTER与DROP三个语法所组成DML:数据操作语言ÿ…...

2023年国赛数学建模思路 - 案例:退火算法
文章目录 1 退火算法原理1.1 物理背景1.2 背后的数学模型 2 退火算法实现2.1 算法流程2.2算法实现 建模资料 ## 0 赛题思路 (赛题出来以后第一时间在CSDN分享) https://blog.csdn.net/dc_sinor?typeblog 1 退火算法原理 1.1 物理背景 在热力学上&a…...

怎么借助ChatGPT处理数据结构的问题
目录 使用ChatGPT进行数据格式化转换 代码示例 ChatGPT格式化数据提示语 代码示例 批量格式化数据提示语 代码示例 ChatGPT生成的格式化批处理代码 使用ChatGPT合并不同数据源的数据 合并数据提示语 自动合并数据提示语 ChatGPT生成的自动合并代码 结论 数据合并是…...
Docker容器无法启动 Cannot find /usr/local/tomcat/bin/setclasspath.sh
报错信息如下 解决办法 权限不够 加上--privileged 获取最大权限 docker run --privileged --name lenglianerqi -p 9266:8080 -v /opt/docker/lenglianerqi/webapps:/usr/local/tomcat/webapps/ -v /opt/docker/lenglianerqi/webapps/userfile:/usr/local/tomcat/webapps/u…...

Pytorch-day08-模型进阶训练技巧-checkpoint
PyTorch 模型进阶训练技巧 自定义损失函数动态调整学习率 典型案例:loss上下震荡 [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-BndMyRX0-1692613806232)(attachment:image-2.png)] 1、自定义损失函数 1、PyTorch已经提供了很多常用…...
:样式(Style)和符号(Symbol))
【ArcGIS Pro二次开发】(61):样式(Style)和符号(Symbol)
在 ArcGIS Pro SDK 中,地图要素符号(Symbol)和符号样式(Style)是2个很重要的概念。 【Symbol】是用于表示地图上不同类型的要素(如点、线、面)的图形化表示。 在地图中,各种要素都…...

深入理解 HTTP/2:提升 Web 性能的秘密
HTTP/2 是一项重大的网络协议升级,旨在提升 Web 页面加载速度和性能。在这篇博客中,我们将深入探讨 HTTP/2 的核心概念以及如何使用它来加速网站。 什么是 HTTP/2? HTTP/2 是 HTTP 协议的下一个版本,旨在解决 HTTP/1.1 中的性能…...
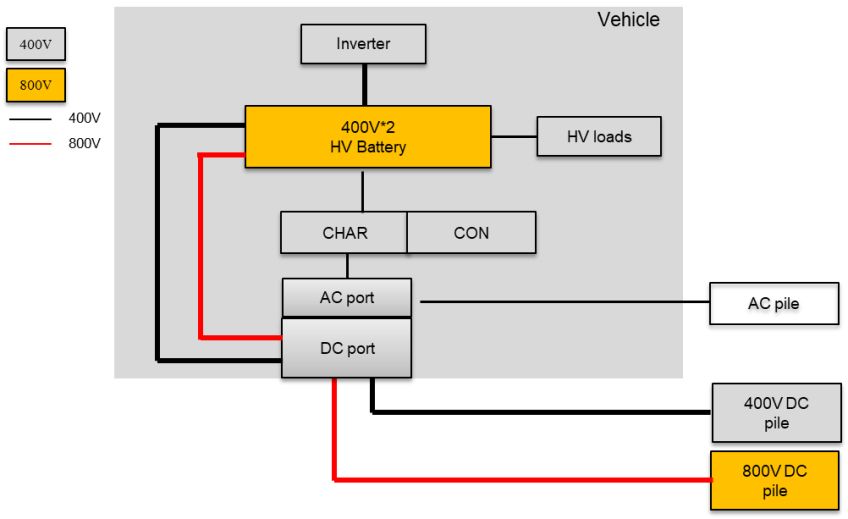
800V高压电驱动系统架构分析
需要电驱竞品样件请联:shbinzer (拆车邦) 过去一年是新能源汽车市场爆发的一年,据中汽协数据,2021年新能源汽车销售352万辆,同比大幅增长157.5%。新能源汽车技术发展迅速,畅销车辆在动力性能…...

内存分配函数malloc kmalloc vmalloc
内存分配函数malloc kmalloc vmalloc malloc实现步骤: 1)请求大小调整:首先,malloc 需要调整用户请求的大小,以适应内部数据结构(例如,可能需要存储额外的元数据)。通常,这包括对齐调整,确保分配的内存地址满足特定硬件要求(如对齐到8字节或16字节边界)。 2)空闲…...
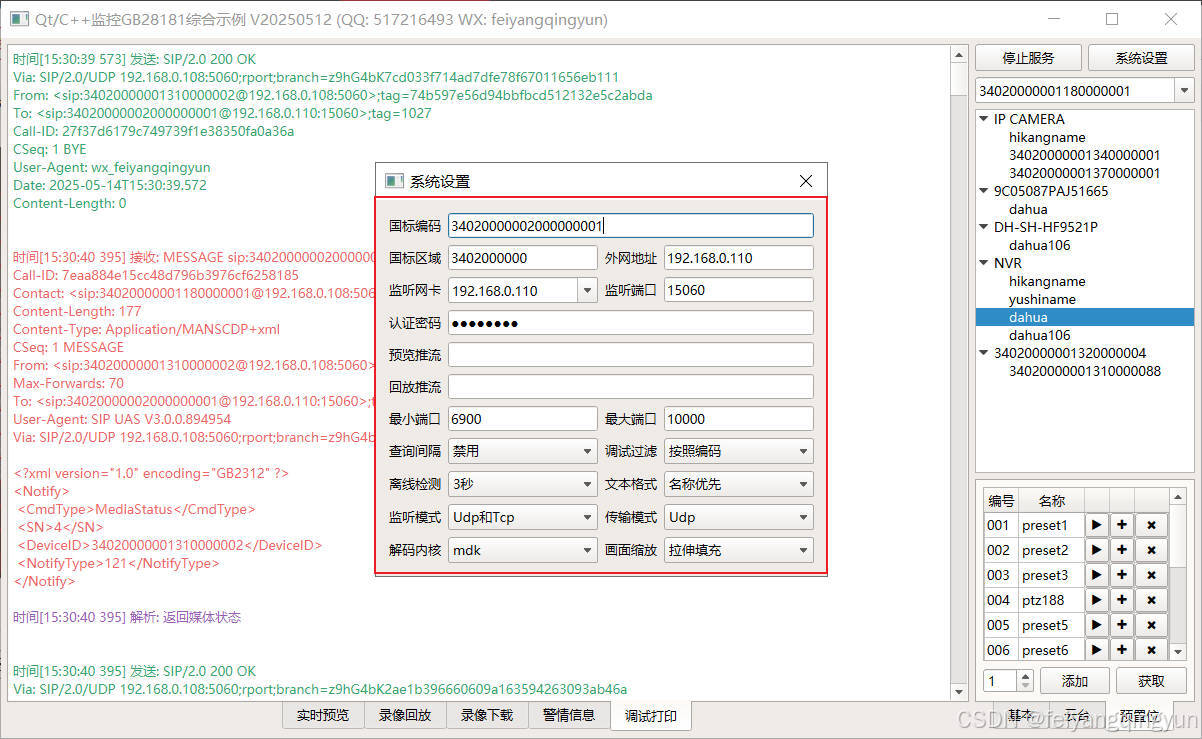
Qt/C++开发监控GB28181系统/取流协议/同时支持udp/tcp被动/tcp主动
一、前言说明 在2011版本的gb28181协议中,拉取视频流只要求udp方式,从2016开始要求新增支持tcp被动和tcp主动两种方式,udp理论上会丢包的,所以实际使用过程可能会出现画面花屏的情况,而tcp肯定不丢包,起码…...

MongoDB学习和应用(高效的非关系型数据库)
一丶 MongoDB简介 对于社交类软件的功能,我们需要对它的功能特点进行分析: 数据量会随着用户数增大而增大读多写少价值较低非好友看不到其动态信息地理位置的查询… 针对以上特点进行分析各大存储工具: mysql:关系型数据库&am…...
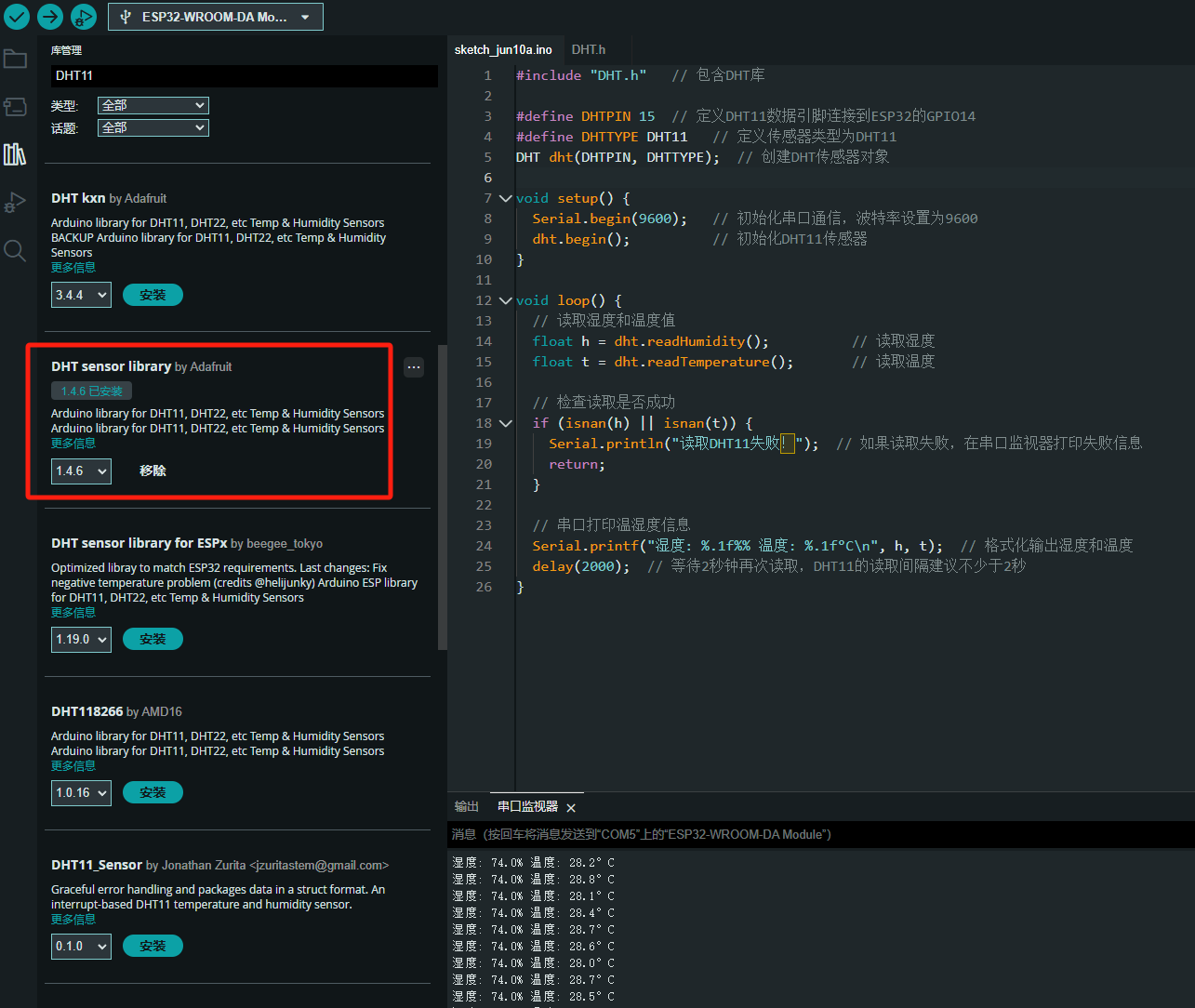
ESP32读取DHT11温湿度数据
芯片:ESP32 环境:Arduino 一、安装DHT11传感器库 红框的库,别安装错了 二、代码 注意,DATA口要连接在D15上 #include "DHT.h" // 包含DHT库#define DHTPIN 15 // 定义DHT11数据引脚连接到ESP32的GPIO15 #define D…...

在四层代理中还原真实客户端ngx_stream_realip_module
一、模块原理与价值 PROXY Protocol 回溯 第三方负载均衡(如 HAProxy、AWS NLB、阿里 SLB)发起上游连接时,将真实客户端 IP/Port 写入 PROXY Protocol v1/v2 头。Stream 层接收到头部后,ngx_stream_realip_module 从中提取原始信息…...
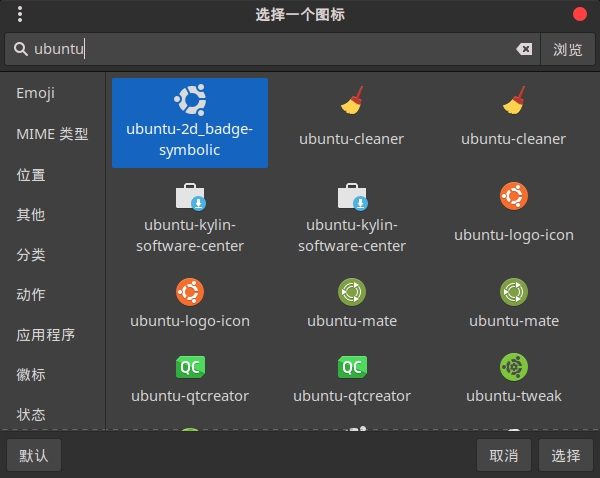
Cinnamon修改面板小工具图标
Cinnamon开始菜单-CSDN博客 设置模块都是做好的,比GNOME简单得多! 在 applet.js 里增加 const Settings imports.ui.settings;this.settings new Settings.AppletSettings(this, HTYMenusonichy, instance_id); this.settings.bind(menu-icon, menu…...
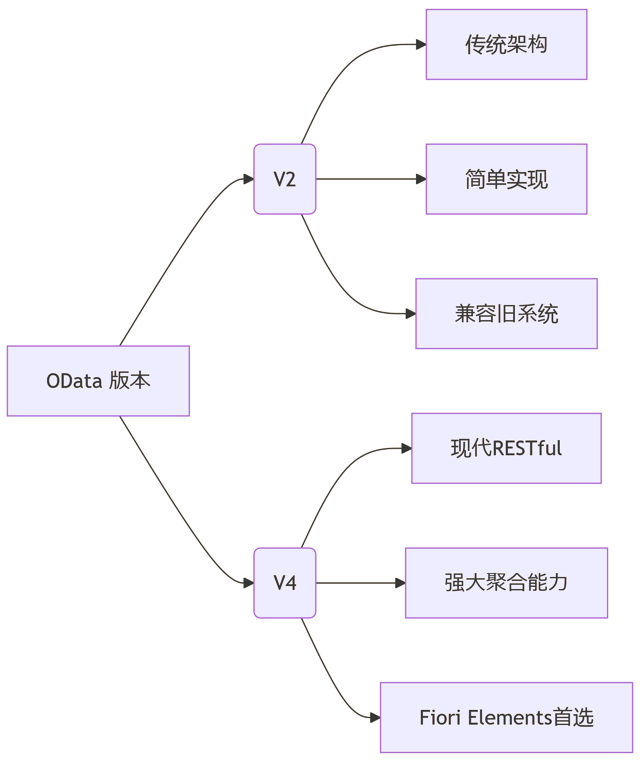
SAP学习笔记 - 开发26 - 前端Fiori开发 OData V2 和 V4 的差异 (Deepseek整理)
上一章用到了V2 的概念,其实 Fiori当中还有 V4,咱们这一章来总结一下 V2 和 V4。 SAP学习笔记 - 开发25 - 前端Fiori开发 Remote OData Service(使用远端Odata服务),代理中间件(ui5-middleware-simpleproxy)-CSDN博客…...

高效线程安全的单例模式:Python 中的懒加载与自定义初始化参数
高效线程安全的单例模式:Python 中的懒加载与自定义初始化参数 在软件开发中,单例模式(Singleton Pattern)是一种常见的设计模式,确保一个类仅有一个实例,并提供一个全局访问点。在多线程环境下,实现单例模式时需要注意线程安全问题,以防止多个线程同时创建实例,导致…...

Xen Server服务器释放磁盘空间
disk.sh #!/bin/bashcd /run/sr-mount/e54f0646-ae11-0457-b64f-eba4673b824c # 全部虚拟机物理磁盘文件存储 a$(ls -l | awk {print $NF} | cut -d. -f1) # 使用中的虚拟机物理磁盘文件 b$(xe vm-disk-list --multiple | grep uuid | awk {print $NF})printf "%s\n"…...

#Uniapp篇:chrome调试unapp适配
chrome调试设备----使用Android模拟机开发调试移动端页面 Chrome://inspect/#devices MuMu模拟器Edge浏览器:Android原生APP嵌入的H5页面元素定位 chrome://inspect/#devices uniapp单位适配 根路径下 postcss.config.js 需要装这些插件 “postcss”: “^8.5.…...