【ROS】参数服务器--理论模型与参数操作(C++)
一、概念介绍
参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据。
作用:存储一些多节点共享的数据,类似于全局变量。
二、理论模型[Autolabor-ROS]
参数服务器实现是最为简单的,该模型如下图所示,该模型中涉及到三个角色:
ROS Master (管理者)
Talker (参数设置者)
Listener (参数调用者)
ROS Master 作为一个公共容器保存参数,Talker 可以向容器中设置参数,Listener 可以获取参数。
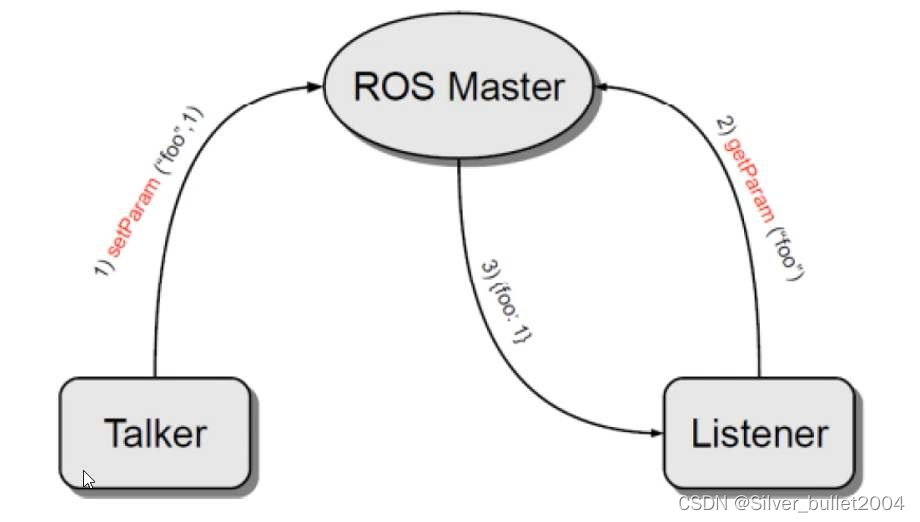
整个流程由以下步骤实现:
1.Talker 设置参数
Talker 通过 RPC 向参数服务器发送参数(包括参数名与参数值),ROS Master 将参数保存到参数列表中。
2.Listener 获取参数
Listener 通过 RPC 向参数服务器发送参数查找请求,请求中包含要查找的参数名。
3.ROS Master 向 Listener 发送参数值
ROS Master 根据步骤2请求提供的参数名查找参数值,并将查询结果通过 RPC 发送给 Listener。
注意:参数服务器不是为高性能而设计的,因此最好用于存储静态的非二进制的简单数据
三、参数操作(C++)
在 C++ 中实现参数服务器数据的增删改查,均可以通过两套 API 实现:
ros::NodeHandle
ros::param
下面为具体操作演示:
1.参数服务器新增(修改)参数 【增、改】
/*参数服务器操作之新增与修改(二者API一样)_C++实现:在 roscpp 中提供了两套 API 实现参数操作ros::NodeHandlesetParam("键",值)ros::paramset("键","值")示例:分别设置整形、浮点、字符串、bool、列表、字典等类型参数修改(相同的键,不同的值)*/
#include "ros/ros.h"int main(int argc, char *argv[])
{ros::init(argc,argv,"set_update_param");std::vector<std::string> stus;stus.push_back("zhangsan");stus.push_back("李四");stus.push_back("王五");stus.push_back("孙大脑袋");std::map<std::string,std::string> friends;friends["guo"] = "huang";friends["yuang"] = "xiao";//NodeHandle--------------------------------------------------------ros::NodeHandle nh;nh.setParam("nh_int",10); //整型nh.setParam("nh_double",3.14); //浮点型nh.setParam("nh_bool",true); //boolnh.setParam("nh_string","hello NodeHandle"); //字符串nh.setParam("nh_vector",stus); // vectornh.setParam("nh_map",friends); // map//修改演示(相同的键,不同的值)nh.setParam("nh_int",10000);//param--------------------------------------------------------ros::param::set("param_int",20);ros::param::set("param_double",3.14);ros::param::set("param_string","Hello Param");ros::param::set("param_bool",false);ros::param::set("param_vector",stus);ros::param::set("param_map",friends);//修改演示(相同的键,不同的值)ros::param::set("param_int",20000);return 0;
}
2.参数服务器获取参数 【查】
/*参数服务器操作之查询_C++实现:在 roscpp 中提供了两套 API 实现参数操作ros::NodeHandleparam(键,默认值)存在,返回对应结果,否则返回默认值getParam(键,存储结果的变量)存在,返回 true,且将值赋值给参数2若果键不存在,那么返回值为 false,且不为参数2赋值getParamCached(键,存储结果的变量)--提高变量获取效率存在,返回 true,且将值赋值给参数2若果键不存在,那么返回值为 false,且不为参数2赋值getParamNames(std::vector<std::string>)获取所有的键,并存储在参数 vector 中hasParam(键)是否包含某个键,存在返回 true,否则返回 falsesearchParam(参数1,参数2)搜索键,参数1是被搜索的键,参数2存储搜索结果的变量ros::param ----- 与 NodeHandle 类似
*/#include "ros/ros.h"int main(int argc, char *argv[])
{setlocale(LC_ALL,"");ros::init(argc,argv,"get_param");//NodeHandle实现--------------------------------------------------------/*ros::NodeHandle nh;// 1.param 函数int res1 = nh.param("nh_int",100); // 键存在int res2 = nh.param("nh_int2",100); // 键不存在ROS_INFO("param获取结果:%d,%d",res1,res2);// 2.getParam 函数int nh_int_value;double nh_double_value;bool nh_bool_value;std::string nh_string_value;std::vector<std::string> stus;std::map<std::string, std::string> friends;nh.getParam("nh_int",nh_int_value);nh.getParam("nh_double",nh_double_value);nh.getParam("nh_bool",nh_bool_value);nh.getParam("nh_string",nh_string_value);nh.getParam("nh_vector",stus);nh.getParam("nh_map",friends);ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",nh_int_value,nh_double_value,nh_string_value.c_str(),nh_bool_value);for (auto &&stu : stus){ROS_INFO("stus 元素:%s",stu.c_str()); }for (auto &&f : friends){ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());}// getParamCached()nh.getParamCached("nh_int",nh_int_value);ROS_INFO("通过缓存获取数据:%d",nh_int_value);//getParamNames()std::vector<std::string> param_names1;nh.getParamNames(param_names1);for (auto &&name : param_names1){ROS_INFO("名称解析name = %s",name.c_str()); }ROS_INFO("----------------------------");ROS_INFO("存在 nh_int 吗? %d",nh.hasParam("nh_int"));ROS_INFO("存在 nh_intttt 吗? %d",nh.hasParam("nh_intttt"));std::string key;nh.searchParam("nh_int",key);ROS_INFO("搜索键:%s",key.c_str());*///param实现--------------------------------------------------------ROS_INFO("++++++++++++++++++++++++++++++++++++++++");int res3 = ros::param::param("param_int",20); //存在int res4 = ros::param::param("param_int2",20); // 不存在返回默认ROS_INFO("param获取结果:%d,%d",res3,res4);// getParam 函数int param_int_value;double param_double_value;bool param_bool_value;std::string param_string_value;std::vector<std::string> param_stus;std::map<std::string, std::string> param_friends;ros::param::get("param_int",param_int_value);ros::param::get("param_double",param_double_value);ros::param::get("param_bool",param_bool_value);ros::param::get("param_string",param_string_value);ros::param::get("param_vector",param_stus);ros::param::get("param_map",param_friends);ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",param_int_value,param_double_value,param_string_value.c_str(),param_bool_value);for (auto &&stu : param_stus) // &&右值引用{ROS_INFO("stus 元素:%s",stu.c_str()); }for (auto &&f : param_friends){ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());}// getParamCached()ros::param::getCached("param_int",param_int_value);ROS_INFO("通过缓存获取数据:%d",param_int_value);//getParamNames()std::vector<std::string> param_names2;ros::param::getParamNames(param_names2);for (auto &&name : param_names2){ROS_INFO("名称解析name = %s",name.c_str()); }ROS_INFO("----------------------------");ROS_INFO("存在 param_int 吗? %d",ros::param::has("param_int"));ROS_INFO("存在 param_intttt 吗? %d",ros::param::has("param_intttt"));std::string key;ros::param::search("param_int",key);ROS_INFO("搜索键:%s",key.c_str());return 0;
}
3.参数服务器删除参数 【删】
/* 参数服务器操作之删除_C++实现:ros::NodeHandledeleteParam("键")根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 falseros::paramdel("键")根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false*/
#include "ros/ros.h"int main(int argc, char *argv[])
{ setlocale(LC_ALL,"");ros::init(argc,argv,"delete_param");ros::NodeHandle nh;bool r1 = nh.deleteParam("nh_int");ROS_INFO("nh 删除结果:%d",r1);bool r2 = ros::param::del("param_int");ROS_INFO("param 删除结果:%d",r2);return 0;
}
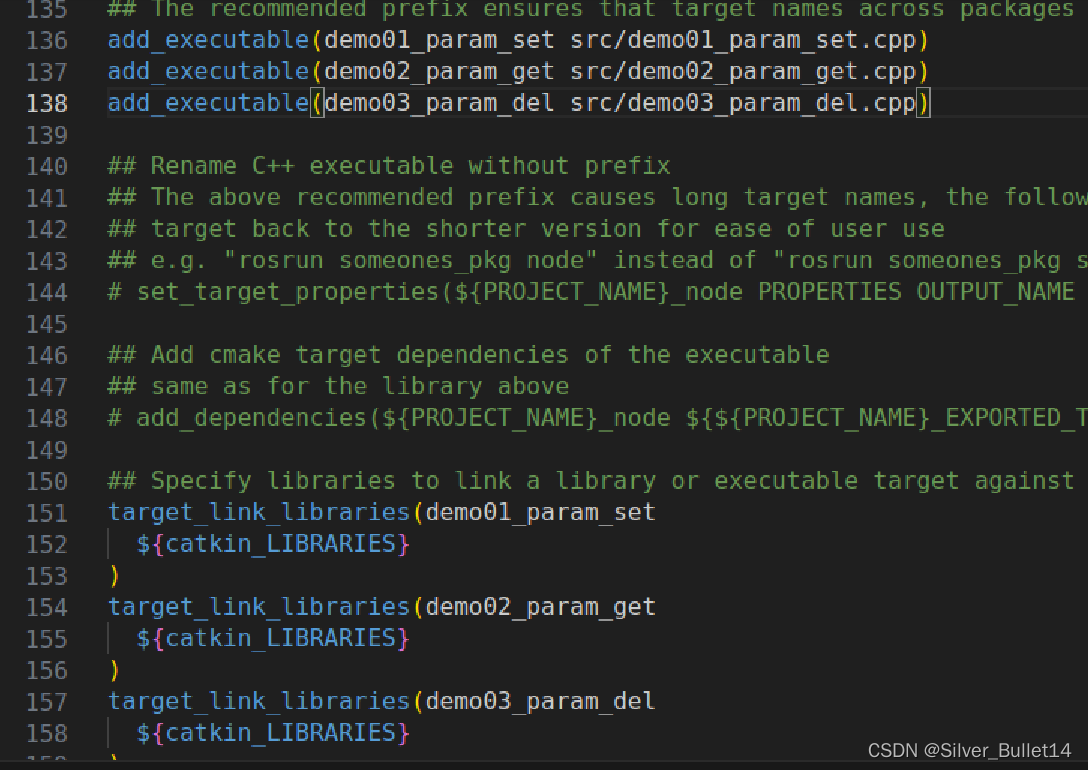
4.配置CMakeList.txt
add_executable(demo01_param_set src/demo01_param_set.cpp)
add_executable(demo02_param_get src/demo02_param_get.cpp)
add_executable(demo03_param_del src/demo03_param_del.cpp)target_link_libraries(demo01_param_set${catkin_LIBRARIES}
)
target_link_libraries(demo02_param_get${catkin_LIBRARIES}
)
target_link_libraries(demo03_param_del${catkin_LIBRARIES}
)
之后编译运行即可,参数服务器相较于之前两个通信机制还是比较简洁的。。。
相关文章:
【ROS】参数服务器--理论模型与参数操作(C++)
一、概念介绍 参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据。 作用:存储一些多节点…...
[oneAPI] 基于BERT预训练模型的英文文本蕴含任务
[oneAPI] 基于BERT预训练模型的英文文本蕴含任务 Intel DevCloud for oneAPI 和 Intel Optimization for PyTorch基于BERT预训练模型的英文文本蕴含任务语料介绍数据集构建 模型训练 结果参考资料 比赛:https://marketing.csdn.net/p/f3e44fbfe46c465f4d9d6c23e38e0…...
【洛谷】P1163 银行贷款
原题链接:https://www.luogu.com.cn/problem/P1163 目录 1. 题目描述 2. 思路分析 3. 代码实现 1. 题目描述 2. 思路分析 这题需要注意的是利率按月累计这句话,也就是相当于“利滚利”。 我们定义sum变量表示贷款原值,money表示每月支付…...

Java版工程行业管理系统源码-专业的工程管理软件-提供一站式服务 em
鸿鹄工程项目管理系统 Spring CloudSpring BootMybatisVueElementUI前后端分离构建工程项目管理系统 1. 项目背景 一、随着公司的快速发展,企业人员和经营规模不断壮大。为了提高工程管理效率、减轻劳动强度、提高信息处理速度和准确性,公司对内部工…...
kafka--技术文档--基本docker中安装<单机>-linux
安装zookeeper 阿丹小科普: Kafka在0.11.0.0版本之后不再依赖Zookeeper,而是使用基于Raft协议的Kafka自身的仲裁机制来替代Zookeeper。具体来说,Kafka 2.8.0版本是第一个不需要Zookeeper就可以运行Kafka的版本,这被称为Kafka Raf…...

回归预测 | MATLAB实现WOA-RF鲸鱼优化算法优化随机森林算法多输入单输出回归预测(多指标,多图)
回归预测 | MATLAB实现WOA-RF鲸鱼优化算法优化随机森林算法多输入单输出回归预测(多指标,多图) 目录 回归预测 | MATLAB实现WOA-RF鲸鱼优化算法优化随机森林算法多输入单输出回归预测(多指标,多图)效果一览…...
Linux系统安全——NAT(SNAT、DNAT)
目录 NAT SNAT SNAT实际操作 DNAT DNAT实际操作 NAT NAT: network address translation,支持PREROUTING,INPUT,OUTPUT,POSTROUTING四个链 请求报文:修改源/目标IP, 响应报文:修改源/目标…...

uniapp项目添加人脸识别功能,可用作登录,付款,流程审批前的安全校验
本案例使用了hbuilder插件商城中的活体检验插件,可自行前往作者处下载查看, 效果图如下 此插件需要在manifest.json中勾选 实现流程 1:前往hbuilder插件市场下载插件 2:在页面中导入import face from "/uni_modules/mcc-…...

SpringBoot面试题
Spring Boot的启动流程主要分为以下几个步骤: 加载Spring Boot配置文件,初始化Spring Boot环境和核心组件,如ApplicationContext上下文环境、自动装配机制等。 执行SpringApplication.run()方法,执行所有Spring Boot自动配置的Be…...
Git相关命令
SSH密钥文件 Github里面S设置SH公钥有两者选择方式 账号下的每个仓库都设置一个公钥,因为GitHub官方要求每个仓库的公钥都不能相同,所以每个账号都要搞一个密钥(很麻烦)给账号分配一个公钥,然后这个公钥就可以在这个…...
《HeadFirst设计模式(第二版)》第八章代码——模板方法模式
代码文件目录: CaffeineBeverage package Chapter8_TemplateMethodPattern;/*** Author 竹心* Date 2023/8/17**/public abstract class CaffeineBeverage {final void prepareRecipe(){boilWater();brew();pourInCup();//这里使用钩子customerWantsCondiments()来…...

RESTful API,以及如何使用它构建 web 应用程序
RESTful API是一种基于HTTP协议的API设计风格,它的核心思想是将资源作为 API 的核心,使用 HTTP 的 GET、POST、PUT、DELETE 等方法对这些资源进行操作,并通过 URL 来定位资源。 RESTful API的特点包括: 资源是 API 的核心使用 H…...

Git+Gitee使用分享
GitGitee快速入门 创建仓库 初始化本地仓库 验证本地git是否安装好 打开cmd窗口,输入git 这样就OK。 Git 全局设置:(只需要设置一次) 这台电脑如果是第一次使用git,就需要这样初始化一下,这样才知道是谁提交到仓库了。 git confi…...

【3D激光SLAM】LOAM源代码解析--transformMaintenance.cpp
系列文章目录 【3D激光SLAM】LOAM源代码解析–scanRegistration.cpp 【3D激光SLAM】LOAM源代码解析–laserOdometry.cpp 【3D激光SLAM】LOAM源代码解析–laserMapping.cpp 【3D激光SLAM】LOAM源代码解析–transformMaintenance.cpp 写在前面 本系列文章将对LOAM源代码进行讲解…...

DiscuzQ 二开教程(7)——二次开发版本部署文档
DiscuzQ 二开教程(7)——二次开发版本部署文档 源码:Discuz-Q-V3: 本仓库为Discuz-Q V3.0.211111 版本的二次开发版本,是将DiscuzQ官方仓库进行合并代码(All in One)整理后的仓库,使用更方便。…...
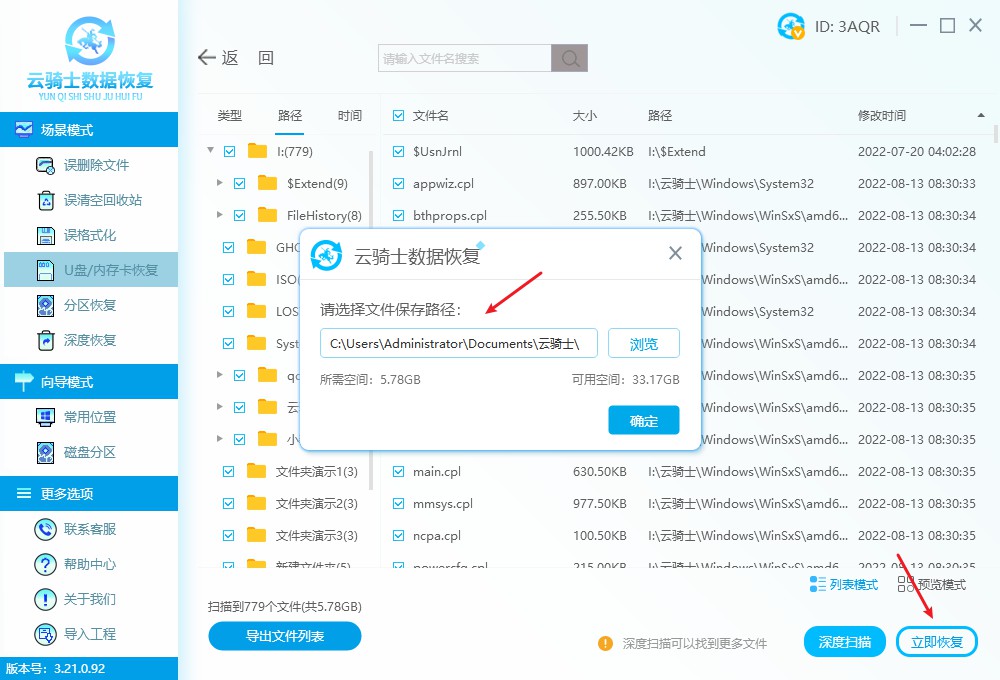
u盘数据丢失但占内存如何恢复?不要着急,这里有拯救方案
U盘数据丢失但占内存如何恢复?数据丢失是一种让人非常头疼的问题,尤其是当我们的U盘数据丢失了,但内存仍然被占用时,更令人困惑和焦虑。然而,不要慌张!在本文中,将为大家介绍一些有效的方法来恢…...

springboot日志文件名称为什么叫logback-spring.xml
如题,为什么springboot日志配置文件叫logback-spring.xml? 在整个项目中搜索 logback-spring.xml 并没有搜索到。 先看一下 org.springframework.boot.context.logging.LoggingApplicationListener#initialize protected void initialize(ConfigurableEn…...
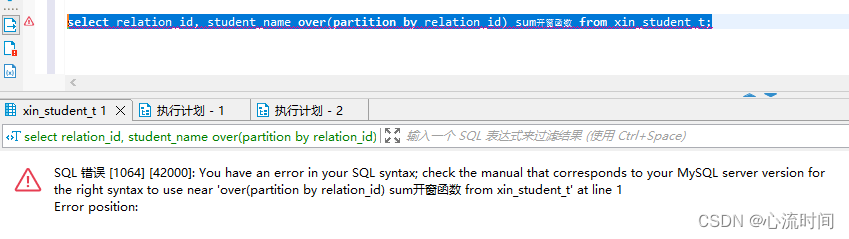
Mysql 开窗函数(窗口函数)
文章目录 全部数据示例1(说明)开窗函数可以比groupby多查出条件列外的字段,开窗函数主要是为了跟聚合函数一起使用,达到分组统计效果,并且开窗函数的结果集基本都是跟总行数一样示例2示例3示例4错误示例1错误示例2错误…...

计算机视觉之图像特征提取
图像特征提取是计算机视觉中的重要任务,它有助于识别、分类、检测和跟踪对象。以下是一些常用的图像特征提取算法及其简介: 颜色直方图(Color Histogram): 简介:颜色直方图表示图像中各种颜色的分布情况。通…...

【面试经典150题】移除元素·JavaScript版
题目来源 大致思路:遍历数组,如果遇到值为val的元素,使用数组最后一个元素替换它。详细过程: /*** param {number[]} nums* param {number} val* return {number}*/ var removeElement function(nums, val) {let i0,nnums.leng…...

synchronized 学习
学习源: https://www.bilibili.com/video/BV1aJ411V763?spm_id_from333.788.videopod.episodes&vd_source32e1c41a9370911ab06d12fbc36c4ebc 1.应用场景 不超卖,也要考虑性能问题(场景) 2.常见面试问题: sync出…...

智慧医疗能源事业线深度画像分析(上)
引言 医疗行业作为现代社会的关键基础设施,其能源消耗与环境影响正日益受到关注。随着全球"双碳"目标的推进和可持续发展理念的深入,智慧医疗能源事业线应运而生,致力于通过创新技术与管理方案,重构医疗领域的能源使用模式。这一事业线融合了能源管理、可持续发…...

利用ngx_stream_return_module构建简易 TCP/UDP 响应网关
一、模块概述 ngx_stream_return_module 提供了一个极简的指令: return <value>;在收到客户端连接后,立即将 <value> 写回并关闭连接。<value> 支持内嵌文本和内置变量(如 $time_iso8601、$remote_addr 等)&a…...

【Java学习笔记】Arrays类
Arrays 类 1. 导入包:import java.util.Arrays 2. 常用方法一览表 方法描述Arrays.toString()返回数组的字符串形式Arrays.sort()排序(自然排序和定制排序)Arrays.binarySearch()通过二分搜索法进行查找(前提:数组是…...

vscode(仍待补充)
写于2025 6.9 主包将加入vscode这个更权威的圈子 vscode的基本使用 侧边栏 vscode还能连接ssh? debug时使用的launch文件 1.task.json {"tasks": [{"type": "cppbuild","label": "C/C: gcc.exe 生成活动文件"…...
Opencv中的addweighted函数
一.addweighted函数作用 addweighted()是OpenCV库中用于图像处理的函数,主要功能是将两个输入图像(尺寸和类型相同)按照指定的权重进行加权叠加(图像融合),并添加一个标量值&#x…...

工程地质软件市场:发展现状、趋势与策略建议
一、引言 在工程建设领域,准确把握地质条件是确保项目顺利推进和安全运营的关键。工程地质软件作为处理、分析、模拟和展示工程地质数据的重要工具,正发挥着日益重要的作用。它凭借强大的数据处理能力、三维建模功能、空间分析工具和可视化展示手段&…...

Caliper 配置文件解析:config.yaml
Caliper 是一个区块链性能基准测试工具,用于评估不同区块链平台的性能。下面我将详细解释你提供的 fisco-bcos.json 文件结构,并说明它与 config.yaml 文件的关系。 fisco-bcos.json 文件解析 这个文件是针对 FISCO-BCOS 区块链网络的 Caliper 配置文件,主要包含以下几个部…...

【学习笔记】深入理解Java虚拟机学习笔记——第4章 虚拟机性能监控,故障处理工具
第2章 虚拟机性能监控,故障处理工具 4.1 概述 略 4.2 基础故障处理工具 4.2.1 jps:虚拟机进程状况工具 命令:jps [options] [hostid] 功能:本地虚拟机进程显示进程ID(与ps相同),可同时显示主类&#x…...

rnn判断string中第一次出现a的下标
# coding:utf8 import torch import torch.nn as nn import numpy as np import random import json""" 基于pytorch的网络编写 实现一个RNN网络完成多分类任务 判断字符 a 第一次出现在字符串中的位置 """class TorchModel(nn.Module):def __in…...