记录:ubuntu20.04+ORB_SLAM2_with_pointcloud_map+ROS noetic
- 由于相机实时在线运行需要ROS,但Ubuntu22.04只支持ROS2,于是重装Ubuntu20.04。
- 上一篇文章跑通的是官方版本的ORB_SLAM2,不支持点云显示。高翔修改版本支持RGB-D相机的点云显示功能。
高翔修改版本ORB_SLAM2:https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map
环境:ubunntu20.04、opencv3.4.12编译、pangolin0.5编译、PCL1.10、eigen3.3.7、ROS noetic
- 查看PCL版本:dpkg -l | grep libpcl
- 查看eigen版本:pkg-config --modversion eigen3
备注:我先编译的OpenCV3.4.12,再装的ROS noetic,后面一直用的OpenCV3.4.12编译和运行,普通编译和运行问题比较少。但在ROS编译和运行时遇到了很多问题,主要是ROS noetic自带OpenCV4.2.0会和编译的OpenCV3.4.12出现版本冲突,基于ROS编译时由于会使用到cv_bridge,默认调用OpenCV4.2.0,网上也有一些方案修改cv_bridge,但十分麻烦,后来发现直接用OpenCV4编译源代码,只需要修改个别报错,相对简单。因此,可以在配置环境的时候,优先装ROS noetic,自带OpenCV4.2,就可以不用装OpenCV3.4.12了,把报错改一改即可,不用考虑版本冲突带来的奇奇怪怪的报错。
普通编译(以下使用OpenCV3.4.12编译)
- 只需要其中的子文件夹 ORB_SLAM2_modified、需要原始ORB SLAM2官方版本中的Vocabulary文件夹
- 删除三个build文件夹
ORB_SLAM2_modified/build
ORB_SLAM2_modified/Thirdparty/DBoW2/build
ORB_SLAM2_modified/Thirdparty/g2o/build
- 编译
chmod +x build.sh
./build.sh
出现一堆pcl相关的报错
在CmakeLists.txt中增加set(CMAKE_CXX_STANDARD 14)
重新编译,就只有eigen3相关的警告了
普通运行
高翔修改的点云版本好像只支持RGBD的点云显示,使用双目运行时,出现当前帧和map Viewer都可以显示、PCL窗口(按R键标准可视化)全黑的情况。而且终端输出显示Global map的Size一直为0。
./bin/stereo_euroc Vocabulary/ORBvoc.bin Examples/Stereo/EuRoC.yaml /home/juling/Documents/data/MH_01_easy/mav0/cam0/data /home/juling/Documents/data/MH_01_easy/mav0/cam1/data Examples/Stereo/EuRoC_TimeStamps/MH01.txt
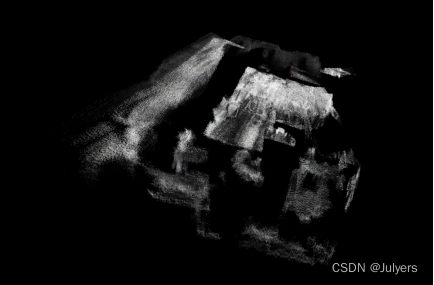
于是跑了一下RGBD的例子,看一下点云是否有输出,排除一下情况。
./bin/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml /home/juling/Documents/data/rgbd_dataset_freiburg1_xyz Examples/RGB-D/associations/fr1_xyz.txt
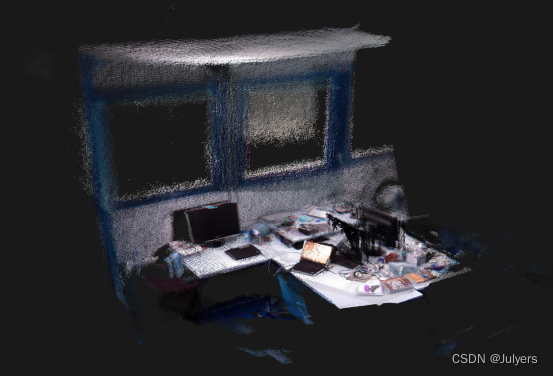
可以实时显示点云。保存为pcd文件,用pcl_viewer打开。
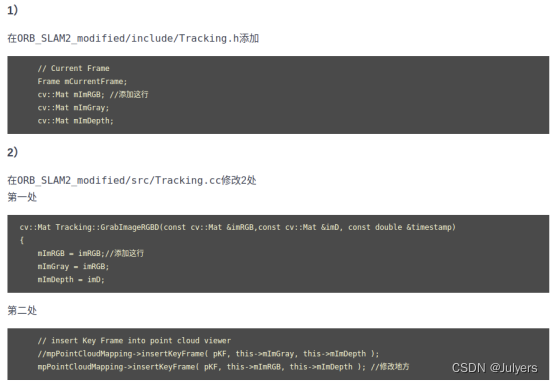
修改如下代码,恢复彩色点云图。
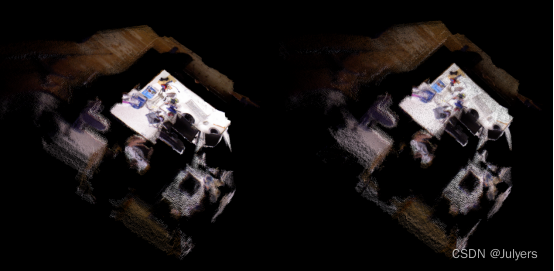
稠密程度:TUM1.yaml中的PointCloudMapping.Resolution参数可改变点云稠密程度。
下图左边是0.00001,右边是0.01的情况。
ROS编译
安装ROS Noetic:http://wiki.ros.org/noetic/Installation/Ubuntu
# 配置环境变量
sudo gedit ~/.bashrc
添加source /opt/ros/noetic/setup.bash
source ~/.bashrc
使用ROS编译前,在bashrc中添加环境变量,然后在终端echo一下,看输出是否正确。
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/juling/Documents/projects/ORBSLAM2_with_pointcloud_map-master/ORB_SLAM2_modified
echo $ROS_PACKAGE_PATH
备注: 如果添加的ORB_SLAM的ROS路径在setup.bash路径的前面, echo路径的时候,发现路径没有更改。所以将export的路径放在最后一行即可。
错误一:ModuleNotFoundError: No module named ‘rospkg’
pip install rospkg
错误二:Unable to find either executable ‘empy’ or Python module ‘em’… try installing the package ‘python3-empy’
pip install python3-empy
错误三:一堆PCL相关报错POINT_CLOUD_REGISTER_POINT_STRUCT
CmakeList.txt中添加set(CMAKE_CXX_STANDARD 14)
错误四:fatal error: pcl/common/transforms.h: No such file or directory 25 | #include <pcl/common/transforms.h>
# CmakeLists.txt中增加PCL库相关
find_package(PCL REQUIRED ) #修改后的set(LIBS
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so
${PCL_LIBRARIES} #修改后的
错误五:undefined reference to symbol,error adding symbols: DSO missing from command line
在ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/CMakeLists.txt文件中添加-lboost_system没有解决问题
应该是OpenCV3与ROS自带OpenCV4冲突的问题
github issues:https://github.com/raulmur/ORB_SLAM2/issues/990
参考解决:https://blog.csdn.net/YLYwj/article/details/131766994
sudo apt install mlocate
locate libopencv_imgproc.so
locate libopencv_core.so
可以看到相关文件的路径,一般在/usr/lib/x86_64-linux-gnu/文件夹下搜索,即可找到libopencv_imgproc.so.4.2.0和libopencv_core.so.4.2.0文件,复制到ORB_SLAM2_modified/lib文件夹中,然后ORB_SLAM2/Examples/ROS/ORB_SLAM2路径下的CmakeLists.txt中添加两行。
set(LIBS
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so
${PCL_LIBRARIES} ####### 5
#-lboost_system ####### 6
${PROJECT_SOURCE_DIR}/../../../lib/libopencv_imgproc.so.4.2.0 ####### 7
${PROJECT_SOURCE_DIR}/../../../lib/libopencv_core.so.4.2.0 ####### 8
重新编译以后,编译通过。但有版本冲突的警告。
ROS运行
roscore
rosrun ORB_SLAM2 Stereo Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml true
运行报segmentation fault (core dumped) 错误。
修改Example/ROS下的CmakeLists.txt,删除-march=native重新编译,没有解决问题。
有没有可能是点云版本的只支持RGBD的ROS功能包,用RGBD试一下,排除一下问题。
https://vision.in.tum.de/data/datasets/rgbd-dataset/download
roscore
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml
rosbag play --pause /home/juling/Documents/data/rgbd_dataset_freiburg1_room.bag
rosrun仍然报核心已转储的错误。应该是OpenCV版本冲突的问题,因为基于OpenCV3编译成功以后,有警告。
删除所有build的文件夹,修改所有CmakeLists.txt中的OpenCV版本为4.2.0,重新进行普通编译(因为ROS编译需要用到DBoW2和g2o),再进行ROS编译。
find_package(OpenCV 4.2 QUIET)
错误:error: ‘CV_LOAD_IMAGE_UNCHANGED’ was not declared in this scope
修改所有的CV_LOAD_IMAGE_UNCHANGED为cv::IMREAD_UNCHANGED即可
此时编译通过,且没有版本冲突的警告。
再次运行RGBD的例子。此时,报了一个pcl no data的错误。并且出现bag运行,map Viewer以及点云窗口都无显示的情况。
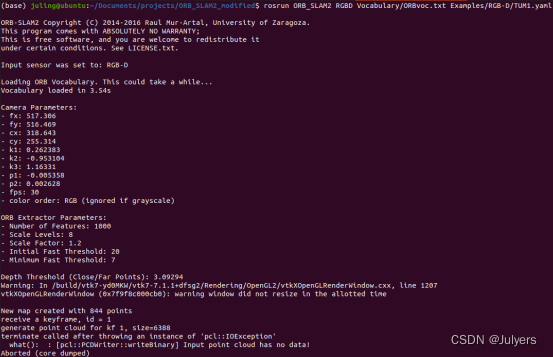
注意:TUM 数据官网中提到 “factor = 5000 # for the 16-bit PNG files,OR: factor = 1 # for the 32-bit float images in the ROS bag files”。这个问题就是5000是普通模式下的,此处是ROS模式。将TUM1.yaml复制出来,重命名为TUM1_ROS.yaml,并将深度校正系数DepthMapFactor改为1.0。即可解决这个问题。另外,注意前面提到的bashrc中的ROS_PACKAGE_PATH。
运行成功。
参考:
https://blog.csdn.net/Evanzxh/article/details/120993982
https://www.jianshu.com/p/5e7b8358893f
https://blog.csdn.net/crp997576280/article/details/104220926/
相关文章:
记录:ubuntu20.04+ORB_SLAM2_with_pointcloud_map+ROS noetic
由于相机实时在线运行需要ROS,但Ubuntu22.04只支持ROS2,于是重装Ubuntu20.04。上一篇文章跑通的是官方版本的ORB_SLAM2,不支持点云显示。高翔修改版本支持RGB-D相机的点云显示功能。 高翔修改版本ORB_SLAM2:https://github.com/ga…...

文心问数Sugar Bot :大模型+BI,多轮会话自动生成可视化图表与数据结论
Sugar BI 的文心问数功能是基于大语言模型实现的,支持您使用自然语言,通过多轮会话的方式,获取实时数据的图表展现,也可以自动为您总结与图表相关的业务结论。 文心问数功能邀测中,欢迎CSDN的用户前来报名:…...

21、WEB漏洞-文件上传之后端黑白名单绕过
目录 前言验证/绕过 前言 关于文件上传的漏洞,目前在网上的常见验证是验证三个方面: 后缀名,文件类型,文件头,其中这个文件头是属于文件内容的一个验证 后缀名:黑名单,白名单 文件类型…...

windows的django项目部署到linux的docker上
编辑dockerfile文件,可以自行寻找相关教程 创建镜像 docker bulid -t imagename:tag .查看镜像 docker images 如果想自己先试一下,那就需要运行容器 docker run -it -d -p 8000:8000 --name volume_name imagename:tag 查看容器 docker ps -a 进…...

【力扣】70. 爬楼梯 <动态规划>
【力扣】70. 爬楼梯 假设你正在爬楼梯。需要 n 阶你才能到达楼顶。每次你可以爬 1 或 2 个台阶。你有多少种不同的方法可以爬到楼顶呢? 示例 1: 输入:n 2 输出:2 解释:有两种方法可以爬到楼顶。 1. 1 阶 1 阶 2. …...
数据结构(3)
线性表是多个具有相同特征的数据的有限序列。 前驱元素:A在B前面,称A为B的前驱元素。 后继元素:B在A后面,称B为A的后继元素。 线性表特征: 1.一个元素没有前驱元素,就是头结点; 2.最后一个…...

深入浅出Pytorch函数——torch.nn.init.xavier_uniform_
分类目录:《深入浅出Pytorch函数》总目录 相关文章: 深入浅出Pytorch函数——torch.nn.init.calculate_gain 深入浅出Pytorch函数——torch.nn.init.uniform_ 深入浅出Pytorch函数——torch.nn.init.normal_ 深入浅出Pytorch函数——torch.nn.init.c…...
工程师)
优橙内推安徽专场——5G网络优化(中高级)工程师
可加入就业QQ群:801549240 联系老师内推简历投递邮箱:hrictyc.com 内推公司1:浙江省邮电工程建设有限公司 内推公司2:北京宜通华瑞科技有限公司 内推公司3:浙江明讯网络技术有限公司 浙江省邮电工程建设有限公司 …...
2023年计算机设计大赛国三 数据可视化 (源码可分享)
2023年暑假参加了全国大学生计算机设计大赛,并获得了国家三等奖(国赛答辩出了点小插曲)。在此分享和记录本次比赛的经验。 目录 一、作品简介二、作品效果图三、设计思路四、项目特色 一、作品简介 本项目实现对农产品近期发展、电商销售、灾…...

工业生产全面感知!工业感知云来了
面向工业企业数字化转型需求,天翼物联基于感知云平台创新能力和5G工业物联数采能力,为客户提供工业感知云服务,包括工业泛协议接入、感知云工业超轻数采平台、工业感知数据治理、工业数据看板四大服务,构建工业感知神经系统新型数…...

Lnton羚通关于Optimization在【PyTorch】中的基础知识
OPTIMIZING MODEL PARAMETERS (模型参数优化) 现在我们有了模型和数据,是时候通过优化数据上的参数来训练了,验证和测试我们的模型。训练一个模型是一个迭代的过程,在每次迭代中,模型会对输出进行猜测&…...

冒泡排序算法
//version 1 void bubblesort(vector<int>& nums){int n=nums.size();for(int i...
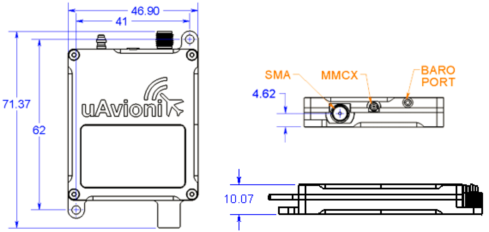
无人机航管应答机 ping200XR
产品概述 ping200XR是一个完整的系统,旨在满足航管应答器和自动相关监视广播(ADS-B)的要求,在管制空域操作无人航空系统(UAS)。该系统完全可配置为模式A,模式C,模式S转发器和扩展ADS-B发射机的任何组合。ping200XR包括一个精度超…...

oracle归档日志满了导致启动不起来解决
oracle启动不起来解决 原因:闪回归档区的空间满了 [oraclepre-oracle ~]$ sqlplus / as sysdbaSQL*Plus: Release 11.2.0.4.0 Production on Tue Aug 22 14:48:50 2023Copyright (c) 1982, 2013, Oracle. All rights reserved.Connected to: Oracle Database 11g…...

高等数学:线性代数-第二章
文章目录 第2章 矩阵及其运算2.1 线性方程组和矩阵2.2 矩阵的运算2.3 逆矩阵2.4 Cramer法则 第2章 矩阵及其运算 2.1 线性方程组和矩阵 n \bm{n} n 元线性方程组 设有 n 个未知数 m 个方程的线性方程组 { a 11 x 1 a 12 x 2 ⋯ a 1 n x n b 1 a 21 x 1 a 22 x 2 ⋯ a …...

星戈瑞分析FITC-PEG-Alkyne的荧光特性和光谱特性
欢迎来到星戈瑞荧光stargraydye!小编带您盘点: FITC-PEG-Alkyne的荧光特性和光谱特性是对其荧光性能进行分析的方面。以下是FITC-PEG-Alkyne的一些常见荧光特性和光谱特性: **1. 荧光激发波长:**FITC-PEG-Alkyne的荧光激发波长通…...

VB.NET调用VB6 Activex EXE实现PowerBasic和FreeBasic的标准DLL调用
VB6写的ActiveX EXE公共对象是外置进程,因此,尽管它是x86 32位的进程,但可以集成到 VB.NET的x64和x32程序中使用。 VS2022的VB.NET程序,调用ActiveX DLL对象我在上篇笔记中写了 VB.NET通过VB6 ActiveX DLL调用PowerBasic及FreeB…...
(下篇))
深入了解Unity的Physics类:一份详细的技术指南(七)(下篇)
接着上一篇深入了解Unity的Physics类(上篇),我们继续把Physics类剩余的属性和方法进行讲解 碰撞检测和忽略: (这些方法和属性涉及查询和处理物体之间的碰撞) Physics.CheckBox: 检查给定位置的盒子是否与任何碰撞器接触或者位于任何碰撞器内部。 Physics.CheckCapsu…...
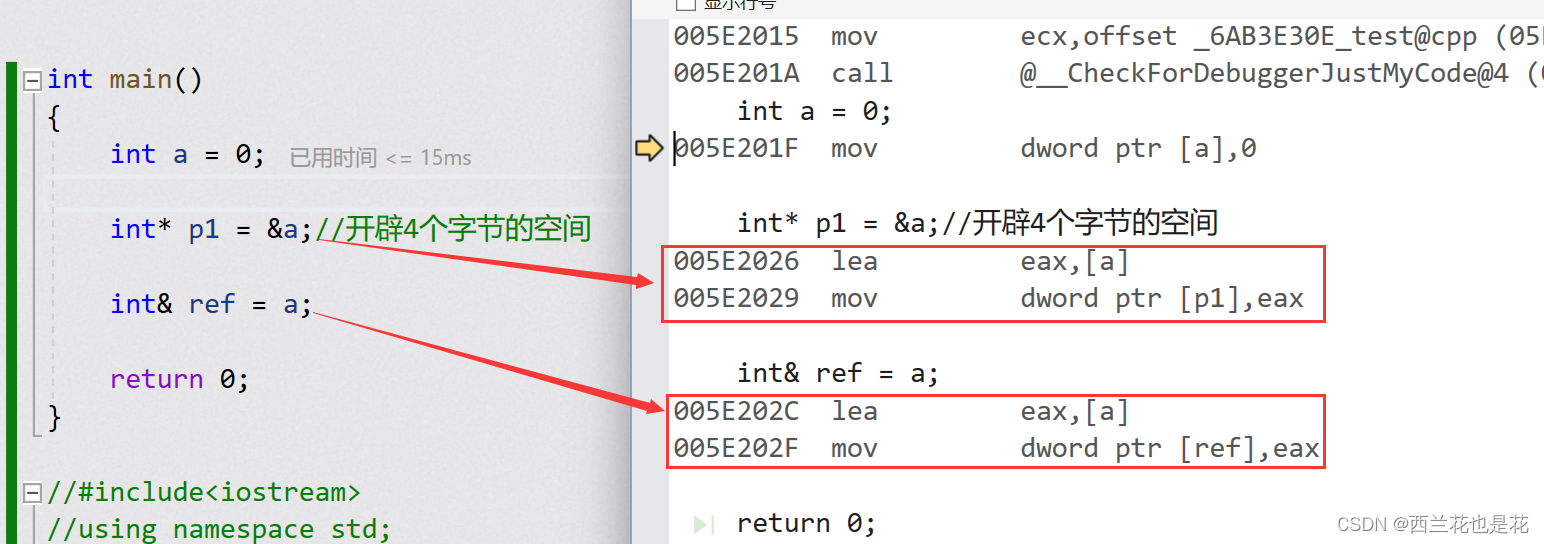
C++入门:引用是什么
目录 1.引用的概念 2.引用的特征 3.常引用 4.引用使用场景 5.传值,传引用效率比较 6.引用与指针的区别 1.引用的概念 引用不是新定义一个变量,而是给已存在变量取了一个别名,编译器不会为引用变量开辟内存空 间,它和它引用…...

2023年人工智能与自动化控制国际学术会议(AIAC 2023)
2023年人工智能与自动化控制国际学术会议(AIAC 2023) The 2023 International Conference on Artificial Intelligence and Automation Control 2023年人工智能与自动化控制国际学术会议(AIAC 2023)将于2023年10月27-29日在中…...

可靠性+灵活性:电力载波技术在楼宇自控中的核心价值
可靠性灵活性:电力载波技术在楼宇自控中的核心价值 在智能楼宇的自动化控制中,电力载波技术(PLC)凭借其独特的优势,正成为构建高效、稳定、灵活系统的核心解决方案。它利用现有电力线路传输数据,无需额外布…...
)
Java入门学习详细版(一)
大家好,Java 学习是一个系统学习的过程,核心原则就是“理论 实践 坚持”,并且需循序渐进,不可过于着急,本篇文章推出的这份详细入门学习资料将带大家从零基础开始,逐步掌握 Java 的核心概念和编程技能。 …...

聊一聊接口测试的意义有哪些?
目录 一、隔离性 & 早期测试 二、保障系统集成质量 三、验证业务逻辑的核心层 四、提升测试效率与覆盖度 五、系统稳定性的守护者 六、驱动团队协作与契约管理 七、性能与扩展性的前置评估 八、持续交付的核心支撑 接口测试的意义可以从四个维度展开,首…...

Web 架构之 CDN 加速原理与落地实践
文章目录 一、思维导图二、正文内容(一)CDN 基础概念1. 定义2. 组成部分 (二)CDN 加速原理1. 请求路由2. 内容缓存3. 内容更新 (三)CDN 落地实践1. 选择 CDN 服务商2. 配置 CDN3. 集成到 Web 架构 …...

LangChain知识库管理后端接口:数据库操作详解—— 构建本地知识库系统的基础《二》
这段 Python 代码是一个完整的 知识库数据库操作模块,用于对本地知识库系统中的知识库进行增删改查(CRUD)操作。它基于 SQLAlchemy ORM 框架 和一个自定义的装饰器 with_session 实现数据库会话管理。 📘 一、整体功能概述 该模块…...
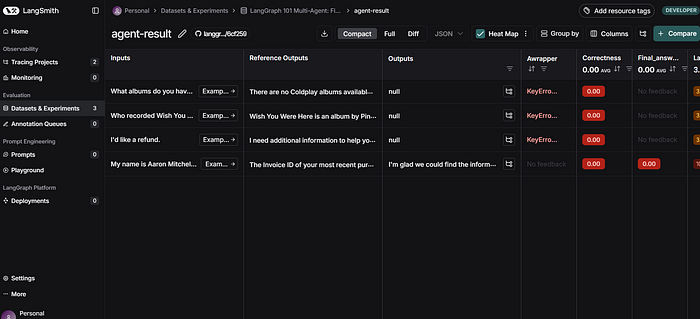
使用LangGraph和LangSmith构建多智能体人工智能系统
现在,通过组合几个较小的子智能体来创建一个强大的人工智能智能体正成为一种趋势。但这也带来了一些挑战,比如减少幻觉、管理对话流程、在测试期间留意智能体的工作方式、允许人工介入以及评估其性能。你需要进行大量的反复试验。 在这篇博客〔原作者&a…...

Redis:现代应用开发的高效内存数据存储利器
一、Redis的起源与发展 Redis最初由意大利程序员Salvatore Sanfilippo在2009年开发,其初衷是为了满足他自己的一个项目需求,即需要一个高性能的键值存储系统来解决传统数据库在高并发场景下的性能瓶颈。随着项目的开源,Redis凭借其简单易用、…...

机器学习的数学基础:线性模型
线性模型 线性模型的基本形式为: f ( x ) ω T x b f\left(\boldsymbol{x}\right)\boldsymbol{\omega}^\text{T}\boldsymbol{x}b f(x)ωTxb 回归问题 利用最小二乘法,得到 ω \boldsymbol{\omega} ω和 b b b的参数估计$ \boldsymbol{\hat{\omega}}…...
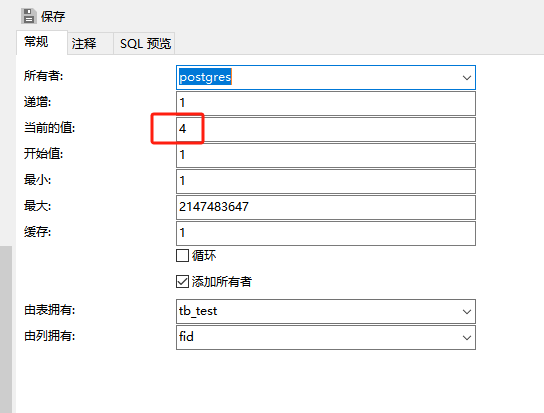
pgsql:还原数据库后出现重复序列导致“more than one owned sequence found“报错问题的解决
问题: pgsql数据库通过备份数据库文件进行还原时,如果表中有自增序列,还原后可能会出现重复的序列,此时若向表中插入新行时会出现“more than one owned sequence found”的报错提示。 点击菜单“其它”-》“序列”,…...

小智AI+MCP
什么是小智AI和MCP 如果还不清楚的先看往期文章 手搓小智AI聊天机器人 MCP 深度解析:AI 的USB接口 如何使用小智MCP 1.刷支持mcp的小智固件 2.下载官方MCP的示例代码 Github:https://github.com/78/mcp-calculator 安这个步骤执行 其中MCP_ENDPOI…...