木叶飞舞之【机器人ROS2】篇章_第二节、turtlebot3安装
没有真实小车的情况下,利用gazebo的仿真,操作小乌龟来学习ros2。废话不多说,直接上命令。
Install Gazebo
sudo apt install ros-humble-gazebo-*
Install Cartographer
假如前一节未安装源码版本的cartographer,那就安装apt版本的。
sudo apt install ros-humble-cartographer
sudo apt install ros-humble-cartographer-ros
Install Navigation2
sudo apt install ros-humble-navigation2
sudo apt install ros-humble-nav2-bringup
Install TurBot3 Packages
source ~/.bashrc
sudo apt install ros-humble-dynamixel-sdk
sudo apt install ros-humble-turtlebot3-msgs
sudo apt install ros-humble-turtlebot3
sudo apt install ros-humble-turtlebot3-gazebo
Install Teleop
sudo apt-get install ros-humble-teleop-twist-keyboard
打开终端,启动机器人gazebo
ros2 launch turtlebot3_gazebo turtlebot3_house.launch.py
另开终端,再启动cartographer启动节点
ros2 launch turtlebot3_cartographer cartographer.launch.py
另开终端,启动键盘启动节点,控制机器人
ros2 run teleop_twist_keyboard teleop_twist_keyboard
另开终端,结束构图,停止接受新数据
ros2 service call /finish_trajectory cartographer_ros_msgs/srv/FinishTrajectory "{trajectory_id: 0}"
序列化保存其当前状态
ros2 service call /write_state cartographer_ros_msgs/srv/WriteState "{filename: '/home/develop/bags/mymap.pbstream'}"
将pbstream转化为pgm和yaml,在cartographer_pbstream_to_ros_map目录下执行
cd /opt/ros/humble/lib/cartographer_ros
./cartographer_pbstream_to_ros_map -map_filestem=${HOME}/bags/mymap -pbstream_filename=${HOME}/bags/mymap.pbstream -resolution=0.05
相关文章:

木叶飞舞之【机器人ROS2】篇章_第二节、turtlebot3安装
没有真实小车的情况下,利用gazebo的仿真,操作小乌龟来学习ros2。废话不多说,直接上命令。 Install Gazebo sudo apt install ros-humble-gazebo-*Install Cartographer 假如前一节未安装源码版本的cartographer,那就安装apt版本…...
【论文阅读】自动驾驶安全的研究现状与挑战
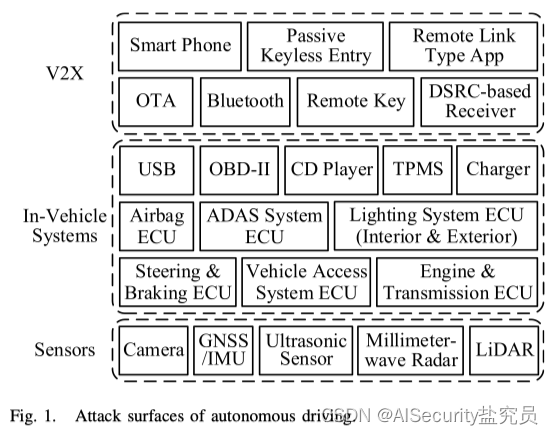
文章目录 摘要1.引言1.1.自动驾驶安全1.2.攻击面1.3.内容和路线图 2.自动驾驶技术2.1.组成2.2.技术 3.传感器安全3.1.照相机3.2.GNSS(全球导航系统)/IMU(惯性测量单元)3.3.超声波传感器3.4.毫米波雷达3.5.激光雷达3.6.多传感器交叉…...
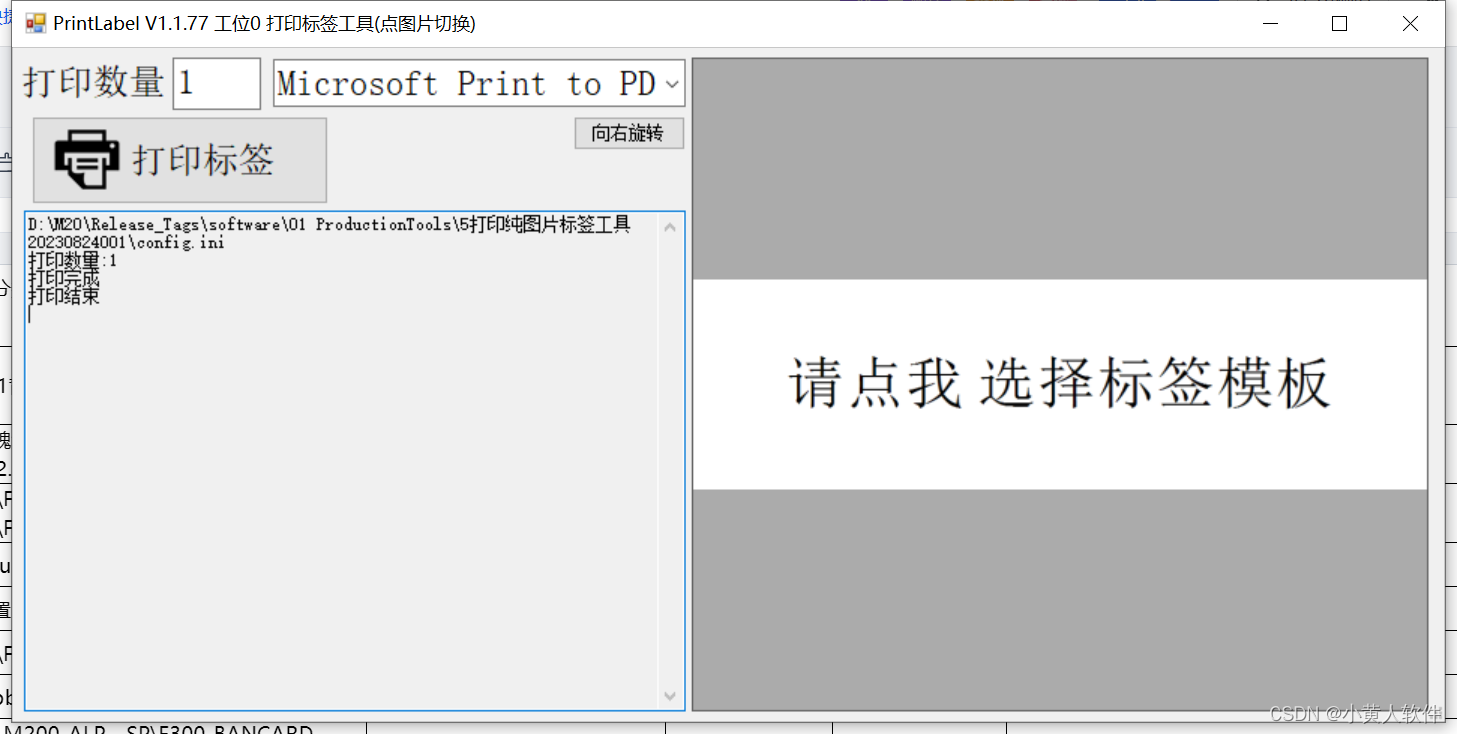
标签打印小工具 选择图片打印,按实际尺寸打印。可旋转图片
您可以尝试使用以下标签打印工具: 柯尼卡美能达标签打印机:功能齐全、易于使用的打印机,支持各种标签尺寸和类型。 赛门铁克标签打印机:高速打印、可靠性强的打印机,支持多种操作系统和软件。 齐柏林标签打印机&…...
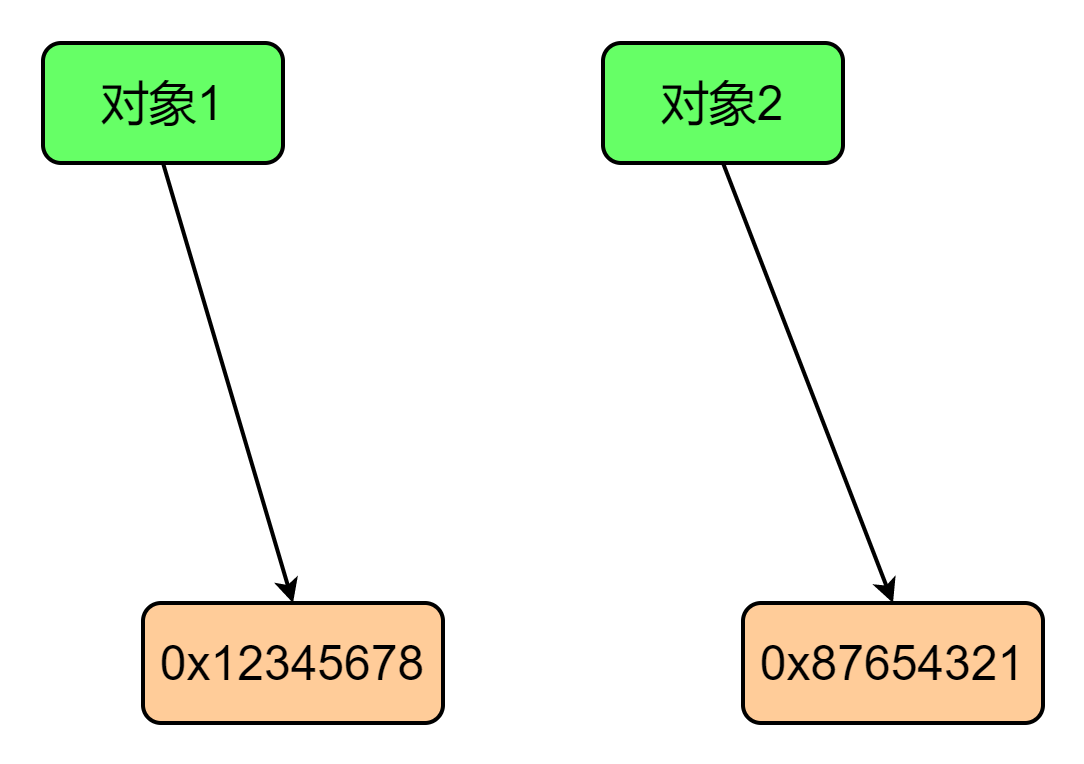
什么是深拷贝和浅拷贝?
面试回答 在计算机内存中,每个对象都有一个地址,这个地址指向对象在内存中存储的位置。当我们使用变量引用一个对象时,实际上是将该对象的地址赋值给变量。因此,如果我们将一个对象复制到另一个变量中国,实际上是将对象…...
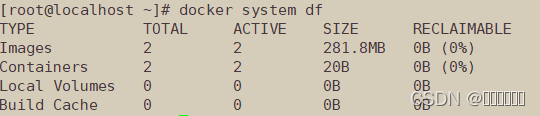
安装docker服务及docker基本操作
一、docker安装(yum安装) 基于centos7 1.添加docker-ce 源信息 安装依赖包(yum-utils 提供了 yum-config-manager ,并且 device mapper 存储驱动程序需要device-mapper-persistent-data 和 lvm2) yum install yum-…...
)
【项目经验】:项目中下拉框数据太多造成页面卡顿(二)
一.项目需求 下拉框下拉列表数据是由后端返回的,而且他会变化,所以数据不是写死的而且数据量大。上一篇博客http://t.csdn.cn/sSNTa我们是用的数据懒加载的方式,这次我们使用远程搜索的方式解决这个问题。 二.用到的组件方法介绍 filterabl…...
Prompt本质解密及Evaluation实战(一)
一、基于evaluation的prompt使用解析 基于大模型的应用评估与传统应用程序的评估不太一样,特别是基于GPT系列或者生成式语言模型,因为模型生成的内容与传统意义上所说的内容或者标签不太一样。 以下是借用了ChatGPT官方的evaluation指南提出的对结果的具…...

linux 在系统已有python2版本下安装python3
方法一:使用包管理器安装 更新包索引: sudo apt update 安装Python3: sudo apt install python3 安装Python3的pip(如果你需要): sudo apt install python3-pip 验证Python 2和3的安装: pyt…...
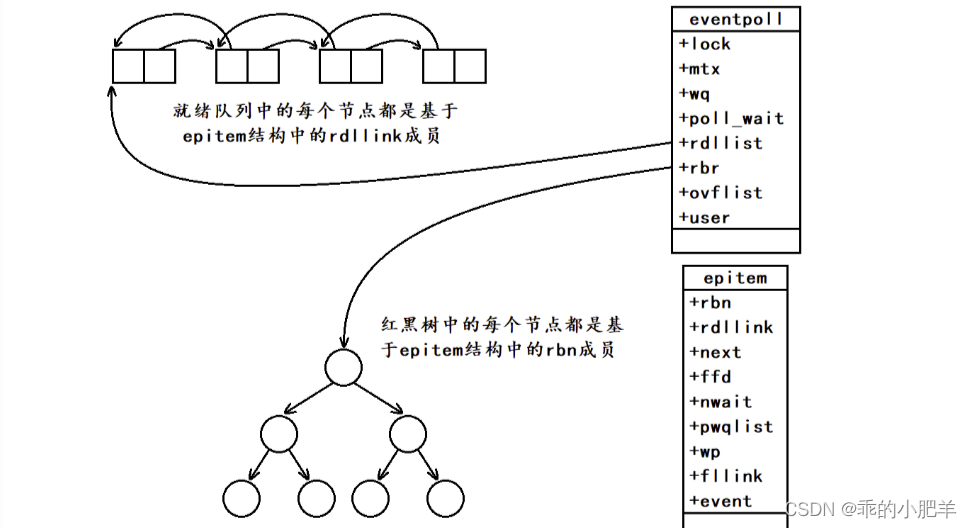
IO多路转接 ——— select、poll、epoll
select初识 select是系统提供的一个多路转接接口。 select系统调用可以让我们的程序同时监视多个文件描述符的上的事件是否就绪。 select的核心工作就是等,当监视的多个文件描述符中有一个或多个事件就绪时,select才会成功返回并将对应文件描述符的就绪…...
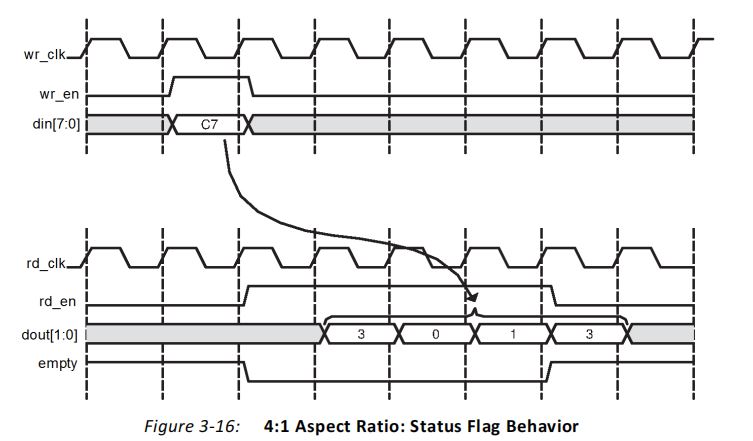
FPGA原理与结构——FIFO IP核原理学习
一、FIFO概述 1、FIFO的定义 FIFO是英文First-In-First-Out的缩写,是一种先入先出的数据缓冲器,与一般的存储器的区别在于没有地址线, 使用起来简单,缺点是只能顺序读写数据,其数据地址由内部读写指针自动加1完成&…...

【Linux操作系统】Linux中的信号回收:管理子进程的关键步骤
在Linux中,我们可以通过捕获SIGCHLD信号来实现对子进程的回收。当一个子进程终止时,内核会向其父进程发送SIGCHLD信号。父进程可以通过注册信号处理函数,并在处理函数中调用wait()或waitpid()函数来回收已终止的子进程。 文章目录 借助信号捕…...
Spark大数据分析与实战笔记(第一章 Scala语言基础-1)
文章目录 章节概要1.1 初识Scala1.1.1 Scala的概述1.1.2 Scala的下载安装1.1.3 在IDEA开发工具中下载安装Scala插件1.1.4 开发第一个Scala程序 章节概要 Spark是专为大规模数据处理而设计的快速通用的计算引擎,它是由Scala语言开发实现的,关于大数据技术…...

R语言03-R语言中的矩阵
概念 在R语言中,矩阵(Matrix)是一个二维的数据结构,由行和列组成,其中所有元素必须具有相同的数据类型。矩阵可以用于存储数值型数据,常用于线性代数运算、统计计算以及数据处理等领域。 代码示例 # 创建…...

“深入理解JVM:探索Java虚拟机的工作原理与优化技巧“
标题:深入理解JVM:探索Java虚拟机的工作原理与优化技巧 摘要:本文将深入探索Java虚拟机(JVM)的工作原理及优化技巧。我们将介绍JVM的架构和组成部分,解释JVM是如何将Java字节码转换为可执行代码的。我们还…...

SQL注入原理
SQL、SQL注入是什么? 结构化查询语言(Structured Query Language,SQL),是一种特殊的编程语言,用于数据库的标准数据查询。1986 年10 月美国国家标准协会对SQL 进行了规范后,以此作为关系型数据库系统的标准语言。1987 …...
PIL.Image和base64,格式互转
将PIL.Image转base64 ##PIL转base64 import base64 from io import BytesIOdef pil_base64(image):img_buffer BytesIO()image.save(img_buffer, formatJPEG)byte_data img_buffer.getvalue()base64_str base64.b64encode(byte_data)return base64_str将base64转PIL.Image …...
)
vue父子组件传值(v-model)
父组件使用v-model传值给子组件 <template><!-- 按钮 --> <el-button click"addMenu(new)">打开弹框</el-button><!-- 自定义组件,下面这两种写法都可以👇 --> <MediaDialog :name"name" v-model:visible&qu…...
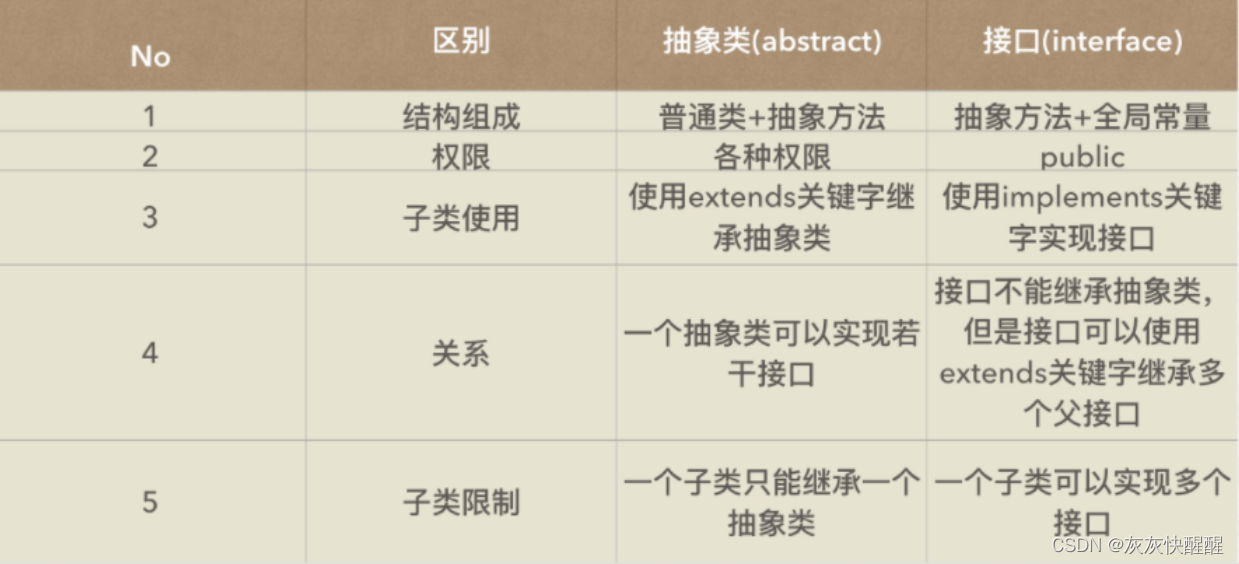
Java接口详解
接口 接口的概念 在现实生活中,接口的例子比比皆是,比如:笔记本上的USB口,电源插座等。 电脑的USB口上,可以插:U盘,鼠标,键盘等所有符合USB协议的设备 电源插座插孔上,…...

Windows共享文件夹,用户密码访问
Windows共享文件夹,用户密码访问 小白教程,一看就会,一做就成。 1.先创建一个用户 计算机右键----管理----本地用户和组----点击用户进去---右键新建用户 这里以kk为例 2.找到你想共享的文件夹 3.共享-想共享的文件夹---右键---属性---共…...

Mac更新node
查看本机node版本 node -v 删除node相关内存 sudo npm cache clean -f 安装n sudo npm install n -g 更新node版本 sudo n stable // 把当前系统的 Node 更新成最新的 “稳定版本” sudo n lts // 长期支持版 sudo n latest // 最新版 sudo n 18.17.1 // 指定安装版本 可以顺便…...
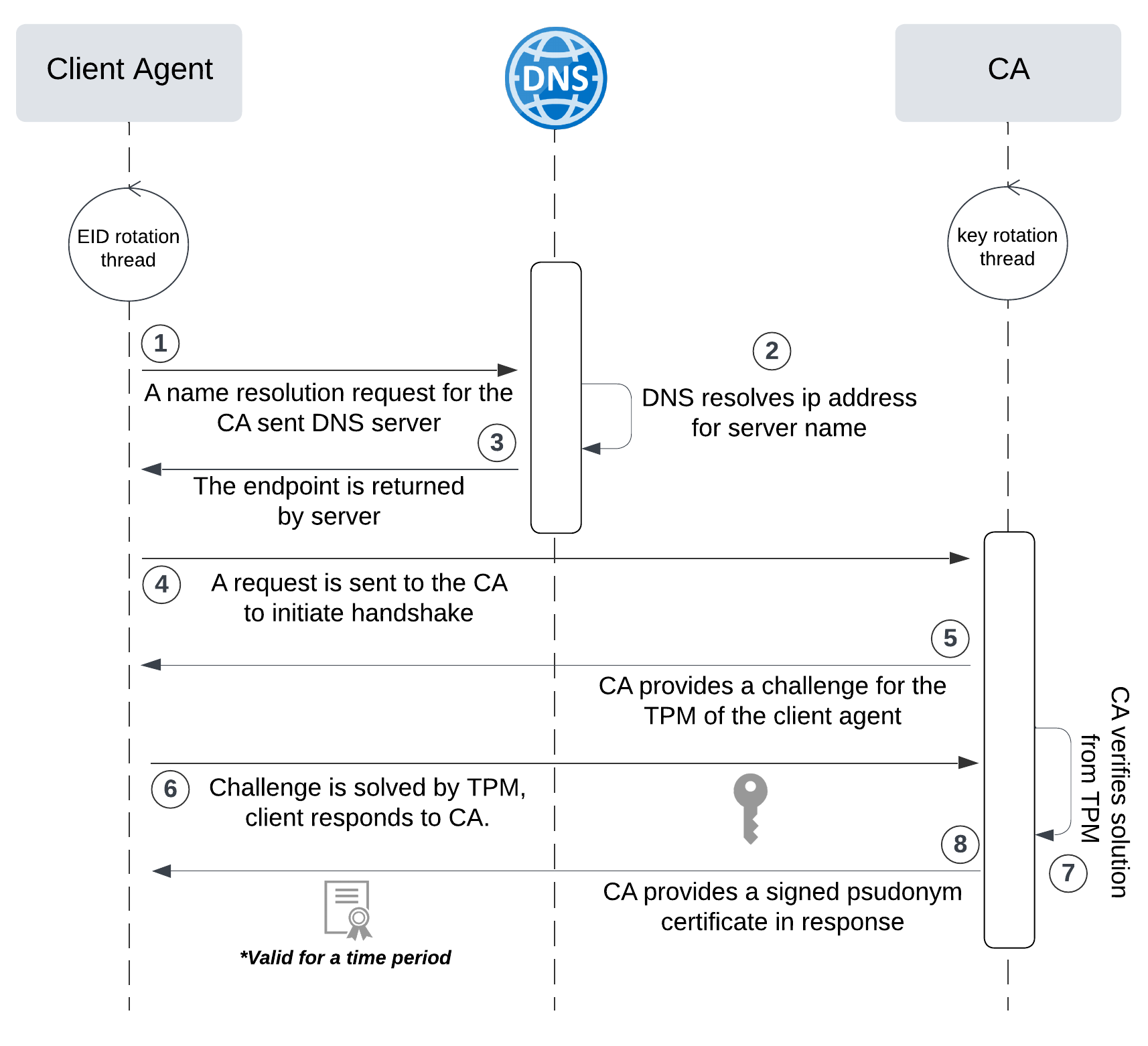
网络六边形受到攻击
大家读完觉得有帮助记得关注和点赞!!! 抽象 现代智能交通系统 (ITS) 的一个关键要求是能够以安全、可靠和匿名的方式从互联车辆和移动设备收集地理参考数据。Nexagon 协议建立在 IETF 定位器/ID 分离协议 (…...
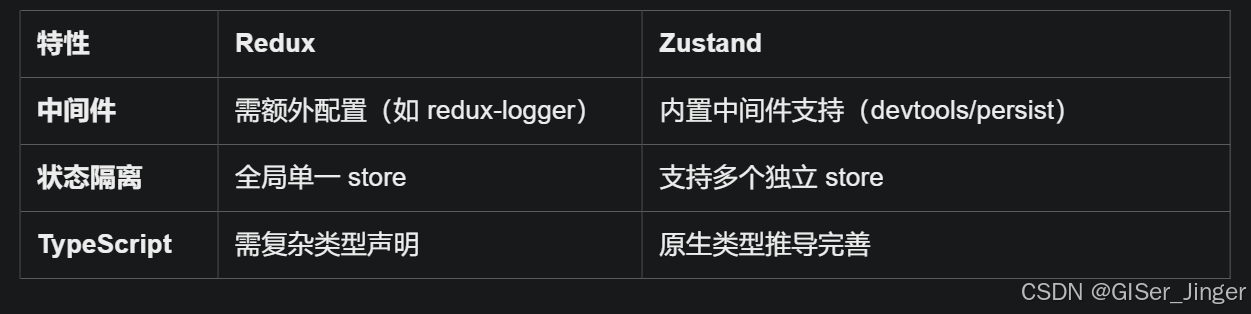
Zustand 状态管理库:极简而强大的解决方案
Zustand 是一个轻量级、快速和可扩展的状态管理库,特别适合 React 应用。它以简洁的 API 和高效的性能解决了 Redux 等状态管理方案中的繁琐问题。 核心优势对比 基本使用指南 1. 创建 Store // store.js import create from zustandconst useStore create((set)…...
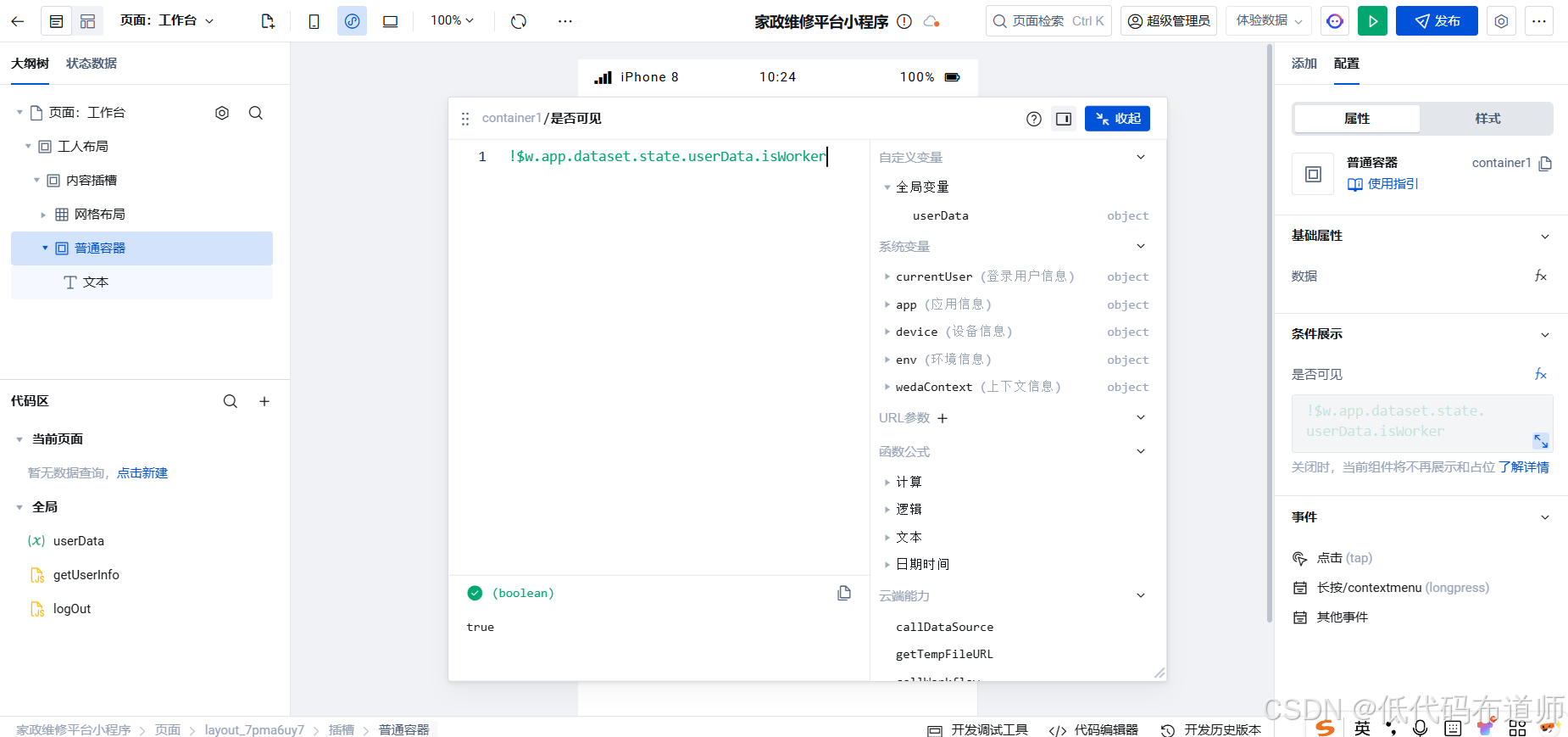
家政维修平台实战20:权限设计
目录 1 获取工人信息2 搭建工人入口3 权限判断总结 目前我们已经搭建好了基础的用户体系,主要是分成几个表,用户表我们是记录用户的基础信息,包括手机、昵称、头像。而工人和员工各有各的表。那么就有一个问题,不同的角色…...

RNN避坑指南:从数学推导到LSTM/GRU工业级部署实战流程
本文较长,建议点赞收藏,以免遗失。更多AI大模型应用开发学习视频及资料,尽在聚客AI学院。 本文全面剖析RNN核心原理,深入讲解梯度消失/爆炸问题,并通过LSTM/GRU结构实现解决方案,提供时间序列预测和文本生成…...
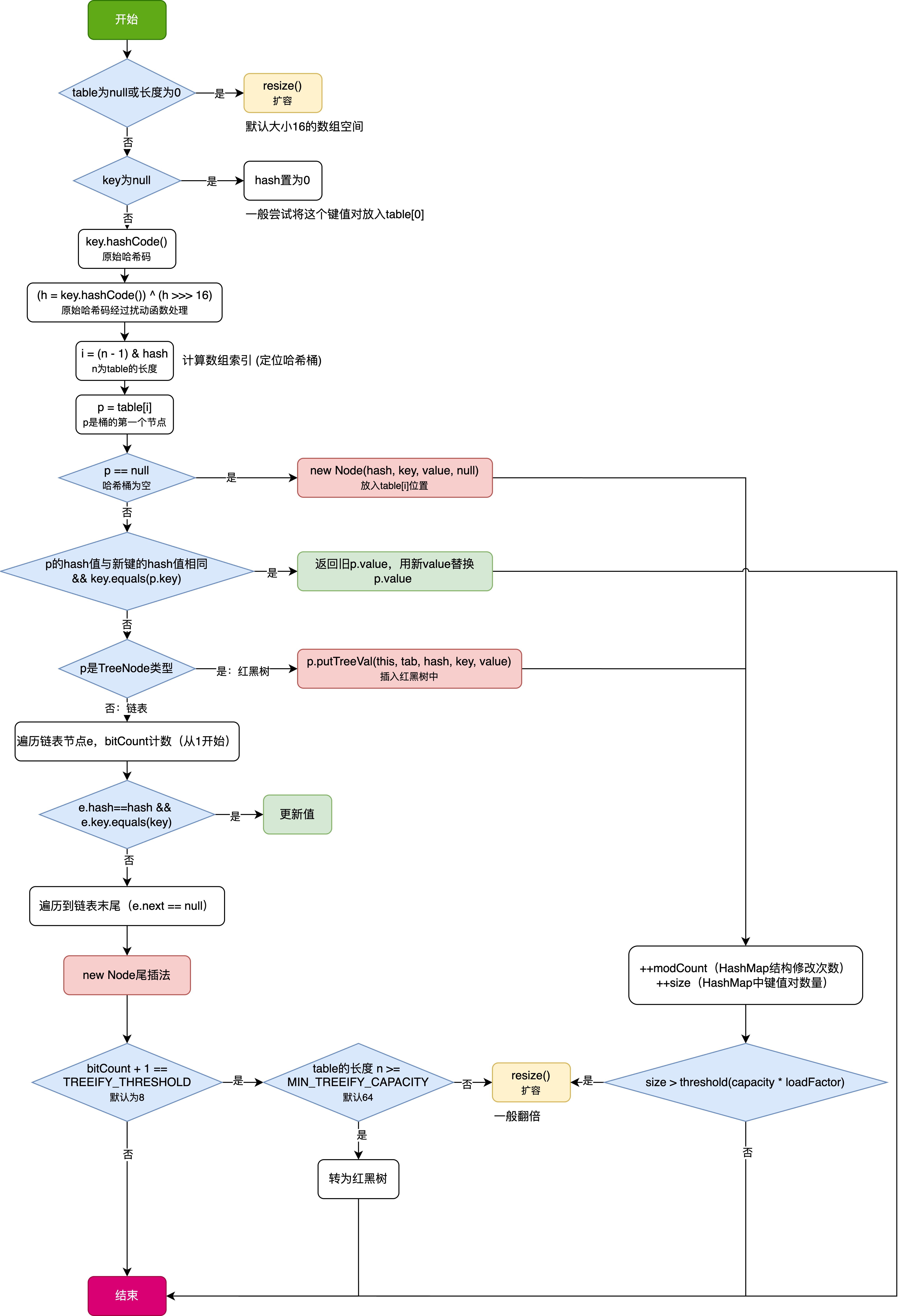
HashMap中的put方法执行流程(流程图)
1 put操作整体流程 HashMap 的 put 操作是其最核心的功能之一。在 JDK 1.8 及以后版本中,其主要逻辑封装在 putVal 这个内部方法中。整个过程大致如下: 初始判断与哈希计算: 首先,putVal 方法会检查当前的 table(也就…...

HarmonyOS运动开发:如何用mpchart绘制运动配速图表
##鸿蒙核心技术##运动开发##Sensor Service Kit(传感器服务)# 前言 在运动类应用中,运动数据的可视化是提升用户体验的重要环节。通过直观的图表展示运动过程中的关键数据,如配速、距离、卡路里消耗等,用户可以更清晰…...

【无标题】路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论
路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论 一、传统路径模型的根本缺陷 在经典正方形路径问题中(图1): mermaid graph LR A((A)) --- B((B)) B --- C((C)) C --- D((D)) D --- A A -.- C[无直接路径] B -…...

Caliper 配置文件解析:fisco-bcos.json
config.yaml 文件 config.yaml 是 Caliper 的主配置文件,通常包含以下内容: test:name: fisco-bcos-test # 测试名称description: Performance test of FISCO-BCOS # 测试描述workers:type: local # 工作进程类型number: 5 # 工作进程数量monitor:type: - docker- pro…...

tomcat指定使用的jdk版本
说明 有时候需要对tomcat配置指定的jdk版本号,此时,我们可以通过以下方式进行配置 设置方式 找到tomcat的bin目录中的setclasspath.bat。如果是linux系统则是setclasspath.sh set JAVA_HOMEC:\Program Files\Java\jdk8 set JRE_HOMEC:\Program Files…...
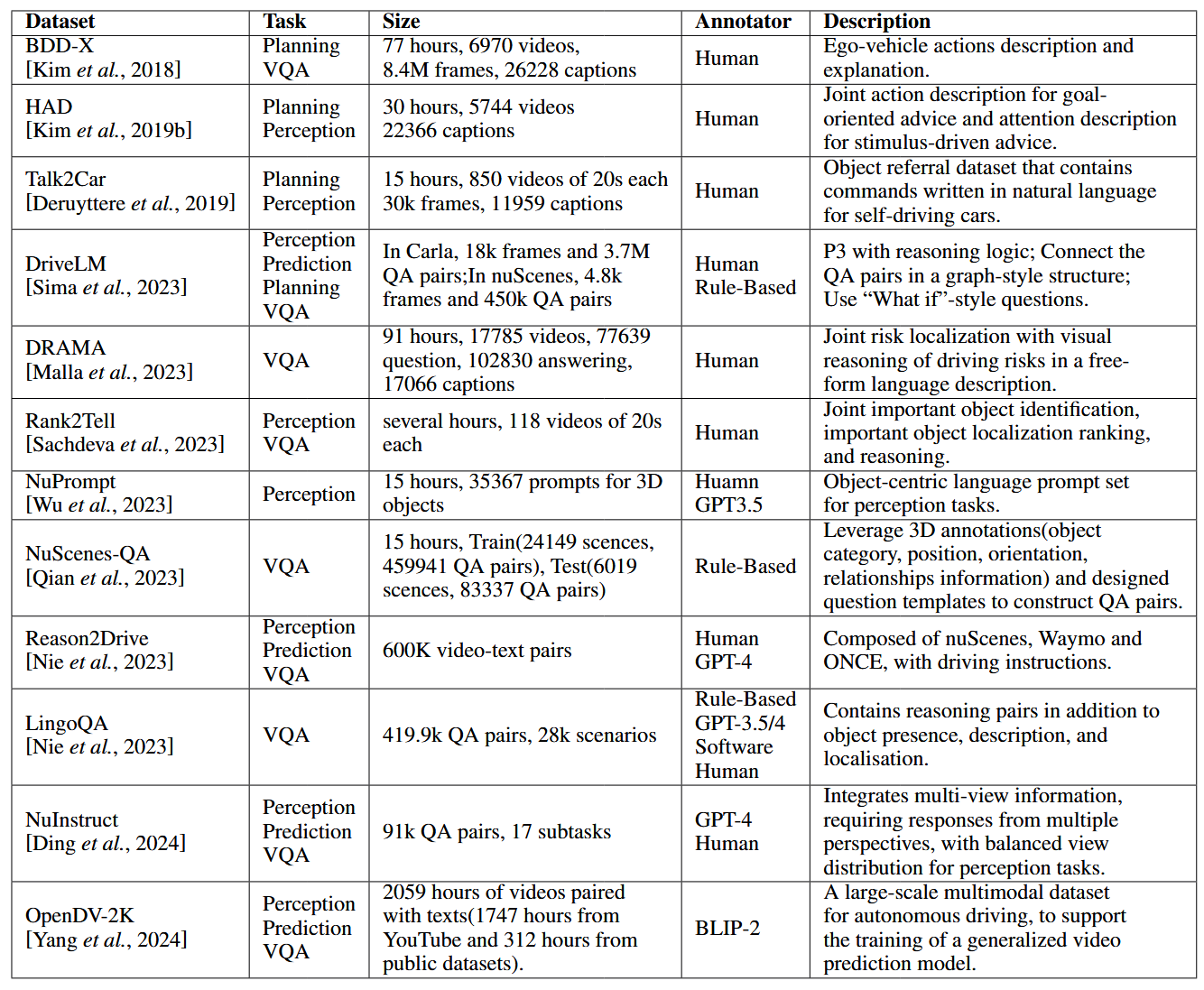
论文阅读:LLM4Drive: A Survey of Large Language Models for Autonomous Driving
地址:LLM4Drive: A Survey of Large Language Models for Autonomous Driving 摘要翻译 自动驾驶技术作为推动交通和城市出行变革的催化剂,正从基于规则的系统向数据驱动策略转变。传统的模块化系统受限于级联模块间的累积误差和缺乏灵活性的预设规则。…...