opencv 案例实战01-停车场车牌识别实战
需求分析:
车牌识别技术主要应用领域有停车场收费管理,交通流量控制指标测量,车辆定位,汽车防盗,高速公路超速自动化监管、闯红灯电子警察、公路收费站等等功能。对于维护交通安全和城市治安,防止交通堵塞,实现交通自动化管理有着现实的意义。
车牌自动识别系统应用的主要技术
- 图像处理相关技术
- 一维条形码相关技术
- 二维数字识别码相关技术
- 三维立体识别码相关技术以及IC卡识别相关技术
车牌识别的技术难点
误定位一直是汽车牌照定位方面的研究重点。汽车牌照分割方面的研究方向一直是如何获得良好的汽车牌照分割,以及如何快速地实现汽车牌照倾斜度校正的基础。
车牌定位技术点分析
车牌特征概述
- 字符特征
- 形状特征
- 颜色特征
- 灰度变化特征
车牌定位方法
- 基于边缘检测的车牌定位方法
- 基于遗传算法的车牌定位方法
- 基于纹理特征的车牌定位方法
- 基于形态学的车牌定义方法
- 基于小波分析和变换的车牌定位方法
- 基于神经网络的车牌定位方法
车牌图像预处理
之所以要进行预处理,主要是为了得到一个比较准确清晰的图像,以便于后期相关分析工作在图像中进行。
车牌图像的灰度化
- 分量法
- 最大值法
- 平均值法
- 加权平均法

生成的灰度图

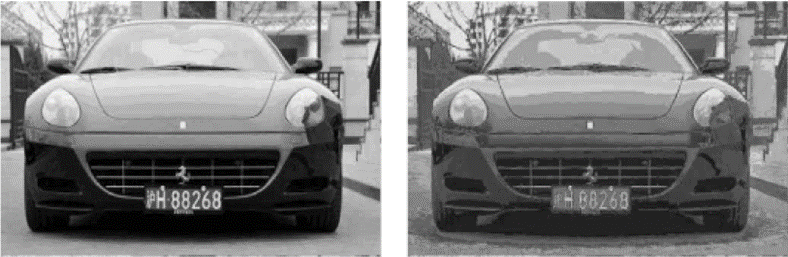
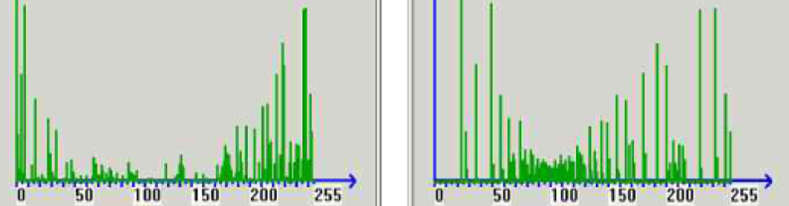
车牌图像的直方图均衡化
在汽车牌照定位之前,可以通过采用直方图均衡化的方法来实现车牌图像亮度接近化的转换处理。
车牌定位技术
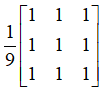
车牌图像的滤波
通常情况下,首先,图像会因为采集时大气湍流、相对运动以及光学系统失真等因素的影响而变得模糊。
图像增强处理的一种常见的方法是图像滤波。
操作模板的形式为:
车牌图像的二值化
确定一个合适阈值,是对图像进行二值化处理的主要目的,待研究的区域经过二值化处理后将被分为背景以及前景两个部分。
车牌图像的边缘检测
两个灰度值不同的相邻区域之间总会存在边缘,也就是图像中亮度函数发生急剧变化的位置,边缘检测是图像分割、纹理和形状特征提取等图像分析的基础。
车牌图像的灰度映射
灰度映射是一种对像素点的操作,即根据原始图像中每个像素的灰度值,按照某种映射规则将其转化为另外一个灰度值,通过对原始图像中每个像素点赋予一个新的灰度值,来达到增强图像的目的。
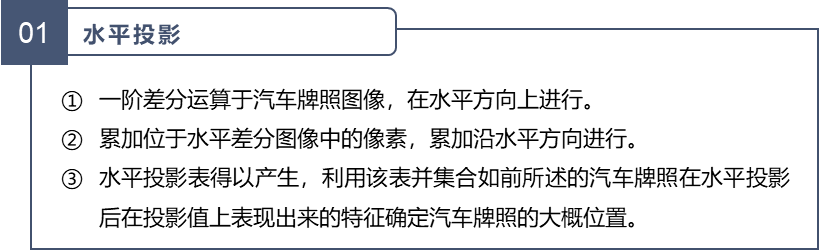
车牌图像的改进型投影法定位



车牌字符分割技术
车牌字符切割方法
基于识别基础的车牌字符分割法
垂直投影分割方法
自适应分割线聚类法
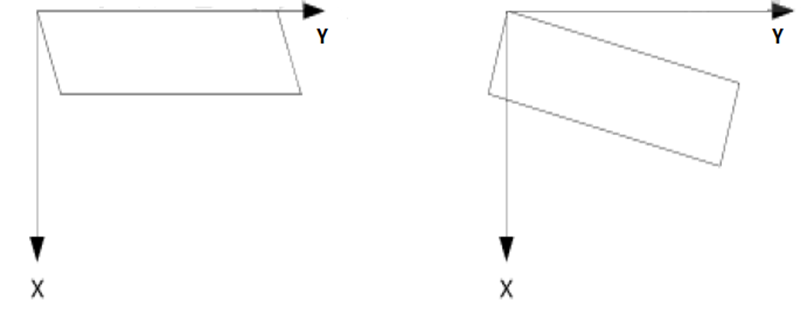
车牌倾斜问题
通常汽车牌照图像的倾斜校正主要分为垂直倾斜校正和水平倾斜校正两种,如此划分的依据是汽车牌照图像倾斜的类型。
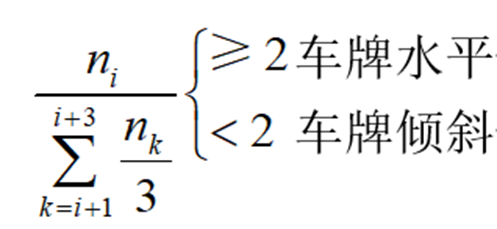
车牌倾斜度检测方法
我们采用基于行扫描的灰度值跳变点数目变化率来判断车牌是否水平。
车牌倾斜的矫正方法
该方法主要是运用两个坐标系之间的变换来实现的;对于倾斜角度在整幅图像上的设定,该方法主要是通过对图像中直线的倾斜角度进行判断来实现的。
车牌边框和铆钉的去除
对车牌图像进行逐行扫描,当扫描到某一行白色像素点宽度大于某一个阈值时,可以认为是字符边沿处,去除这一行以下或以上的所有行就可以消除铆钉和边框的干扰。
车牌字符分割技术
整个字符分割过程需要考虑如下问题:
- 初步垂直切分后的切分结果和字符尺寸应该基本一致。
- 字符拆分
- 字符合并
- 估计字间距、字符中心距离等信息
基于垂直投影和先验知识的车牌字符分割
-
计算垂直投影
-
初步垂直切分
在初步垂直切分中,字符的断裂和粘连现象先不被考虑,进行提取的只是在投影图中已经分离的那些区域。
粘连车牌字符的分割
在低质量车牌图像中,二值化处理后出现的字符粘连现象有时无法被任何一种分割方法所消除,有时利用垂直投影也无法分割那些粘连的字符,造成这种状况的主要原因是有时存在大量的噪声。
断裂车牌字符的合并
先将每两个相邻块之间的距离计算出来,在一定的阈值大于这个距离的情况下,可以认为这两个块属于同一个字符并执行块合并过程。

对车牌字符的切分结果进行确认
字符结果确认机制的具体实现步骤:
- 搜索连通字符区域
- 对字符的垂直切分进行更新和确认
车牌字符识别技术
模式识别
影响并导致汽车牌照内字符出现缺损、污染、模糊等情况的常见因素有照相机的性能、采集车辆图像时光照的差异、汽车牌照的清洁度。
模式识别流程
模式就是一种对某种对象(一些敏感的客体)结构或者定量的描述,是一种集合(由具有某些共同特定性质的模式构成)。
模式识别方法
目前模式识别主要有4种方法:
- 基于神经网络的识别方法、
- 基于句法模式的识别方法、
- 基于统计模式的识别方法和
- 基于模糊模式的识别方法。
字符识别
- 基本原理:对字符图像进行预处理、模式表达、判别和字典学习
- 阶段:初级阶段、对基础理论进行相关研究的阶段、发展阶段
字符识别方法:
基于神经网络的识别方法
基于特征分析的匹配方法
基于模版的匹配方法
目前,小波识别法、模板匹配法与神经网络法等常被作为汽车牌照字符识别的主要方法。
汉字识别
相较于数字和英文字符的识别,汽车牌照中的汉字字符识别的难度更大,主要原因有以下4个方面:
字符笔画因切分误差导致非笔画或笔画流失。
汽车牌照被污染导致字符上出现污垢。
采集所得车辆图像分辨率低下导致多笔画的汉字较难分辨。
车辆图像采集时所受光照影响的差异导致笔画较淡。
代码示例:车牌定位
import cv2
import numpy as npdef stretch(img):'''图像拉伸函数'''maxi = float(img.max())mini = float(img.min())for i in range(img.shape[0]):for j in range(img.shape[1]):img[i, j] = (255 / (maxi - mini) * img[i, j] - (255 * mini) / (maxi - mini))return imgdef dobinaryzation(img):'''二值化处理函数'''maxi = float(img.max())mini = float(img.min())x = maxi - ((maxi - mini) / 2)# 二值化,返回阈值ret 和 二值化操作后的图像threshret, thresh = cv2.threshold(img, x, 255, cv2.THRESH_BINARY)# 返回二值化后的黑白图像return threshdef find_rectangle(contour):'''寻找矩形轮廓'''y, x = [], []for p in contour:y.append(p[0][0])x.append(p[0][1])return [min(y), min(x), max(y), max(x)]def locate_license(img, afterimg):'''定位车牌号'''contours, hierarchy = cv2.findContours(img, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 找出最大的三个区域block = []for c in contours:# 找出轮廓的左上点和右下点,由此计算它的面积和长度比r = find_rectangle(c)a = (r[2] - r[0]) * (r[3] - r[1]) # 面积s = (r[2] - r[0]) * (r[3] - r[1]) # 长度比block.append([r, a, s])# 选出面积最大的3个区域block = sorted(block, key=lambda b: b[1])[-3:]# 使用颜色识别判断找出最像车牌的区域maxweight, maxindex = 0, -1for i in range(len(block)):b = afterimg[block[i][0][1]:block[i][0][3], block[i][0][0]:block[i][0][2]]# BGR转HSVhsv = cv2.cvtColor(b, cv2.COLOR_BGR2HSV)# 蓝色车牌的范围lower = np.array([100, 50, 50])upper = np.array([140, 255, 255])# 根据阈值构建掩膜mask = cv2.inRange(hsv, lower, upper)# 统计权值w1 = 0for m in mask:w1 += m / 255w2 = 0for n in w1:w2 += n# 选出最大权值的区域if w2 > maxweight:maxindex = imaxweight = w2return block[maxindex][0]def find_license(img):'''预处理函数'''m = 400 * img.shape[0] / img.shape[1]# 压缩图像img = cv2.resize(img, (400, int(m)), interpolation=cv2.INTER_CUBIC)# BGR转换为灰度图像gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 灰度拉伸stretchedimg = stretch(gray_img)'''进行开运算,用来去除噪声'''r = 16h = w = r * 2 + 1kernel = np.zeros((h, w), np.uint8)cv2.circle(kernel, (r, r), r, 1, -1)# 开运算openingimg = cv2.morphologyEx(stretchedimg, cv2.MORPH_OPEN, kernel)# 获取差分图,两幅图像做差 cv2.absdiff('图像1','图像2')strtimg = cv2.absdiff(stretchedimg, openingimg)# 图像二值化binaryimg = dobinaryzation(strtimg)# canny边缘检测canny = cv2.Canny(binaryimg, binaryimg.shape[0], binaryimg.shape[1])'''消除小的区域,保留大块的区域,从而定位车牌'''# 进行闭运算kernel = np.ones((5, 19), np.uint8)closingimg = cv2.morphologyEx(canny, cv2.MORPH_CLOSE, kernel)# 进行开运算openingimg = cv2.morphologyEx(closingimg, cv2.MORPH_OPEN, kernel)# 再次进行开运算kernel = np.ones((11, 5), np.uint8)openingimg = cv2.morphologyEx(openingimg, cv2.MORPH_OPEN, kernel)# 消除小区域,定位车牌位置rect = locate_license(openingimg, img)return rect, imgdef cut_license(afterimg, rect):'''图像分割函数'''# 转换为宽度和高度rect[2] = rect[2] - rect[0]rect[3] = rect[3] - rect[1]rect_copy = tuple(rect.copy())rect = [0, 0, 0, 0]# 创建掩膜mask = np.zeros(afterimg.shape[:2], np.uint8)# 创建背景模型 大小只能为13*5,行数只能为1,单通道浮点型bgdModel = np.zeros((1, 65), np.float64)# 创建前景模型fgdModel = np.zeros((1, 65), np.float64)# 分割图像cv2.grabCut(afterimg, mask, rect_copy, bgdModel, fgdModel, 5, cv2.GC_INIT_WITH_RECT)mask2 = np.where((mask == 2) | (mask == 0), 0, 1).astype('uint8')img_show = afterimg * mask2[:, :, np.newaxis]return img_showdef deal_license(licenseimg):'''车牌图片二值化'''# 车牌变为灰度图像gray_img = cv2.cvtColor(licenseimg, cv2.COLOR_BGR2GRAY)# 均值滤波 去除噪声kernel = np.ones((3, 3), np.float32) / 9gray_img = cv2.filter2D(gray_img, -1, kernel)# 二值化处理ret, thresh = cv2.threshold(gray_img, 120, 255, cv2.THRESH_BINARY)return threshdef find_end(start, arg, black, white, width, black_max, white_max):end = start + 1for m in range(start + 1, width - 1):if (black[m] if arg else white[m]) > (0.98 * black_max if arg else 0.98 * white_max):end = mbreakreturn endif __name__ == '__main__':img = cv2.imread('car.jpg', cv2.IMREAD_COLOR)# 预处理图像rect, afterimg = find_license(img)# 框出车牌号cv2.rectangle(afterimg, (rect[0], rect[1]), (rect[2], rect[3]), (0, 255, 0), 2)cv2.imshow('afterimg', afterimg)# 分割车牌与背景cutimg = cut_license(afterimg, rect)cv2.imshow('cutimg', cutimg)# 二值化生成黑白图thresh = deal_license(cutimg)cv2.imshow('thresh', thresh)cv2.imwrite("cp.jpg", thresh)cv2.waitKey(0)# 分割字符'''判断底色和字色'''# 记录黑白像素总和white = []black = []height = thresh.shape[0] # 263width = thresh.shape[1] # 400# print('height',height)# print('width',width)white_max = 0black_max = 0# 计算每一列的黑白像素总和for i in range(width):line_white = 0line_black = 0for j in range(height):if thresh[j][i] == 255:line_white += 1if thresh[j][i] == 0:line_black += 1white_max = max(white_max, line_white)black_max = max(black_max, line_black)white.append(line_white)black.append(line_black)print('white', white)print('black', black)# arg为true表示黑底白字,False为白底黑字arg = Trueif black_max < white_max:arg = Falsen = 1start = 1end = 2while n < width - 2:n += 1# 判断是白底黑字还是黑底白字 0.05参数对应上面的0.95 可作调整if (white[n] if arg else black[n]) > (0.02 * white_max if arg else 0.02 * black_max):start = nend = find_end(start, arg, black, white, width, black_max, white_max)n = endif end - start > 5:cj = thresh[1:height, start:end]cv2.imshow('cutlicense', cj)cv2.waitKey(0)cv2.waitKey(0)cv2.destroyAllWindows()
运行效果:
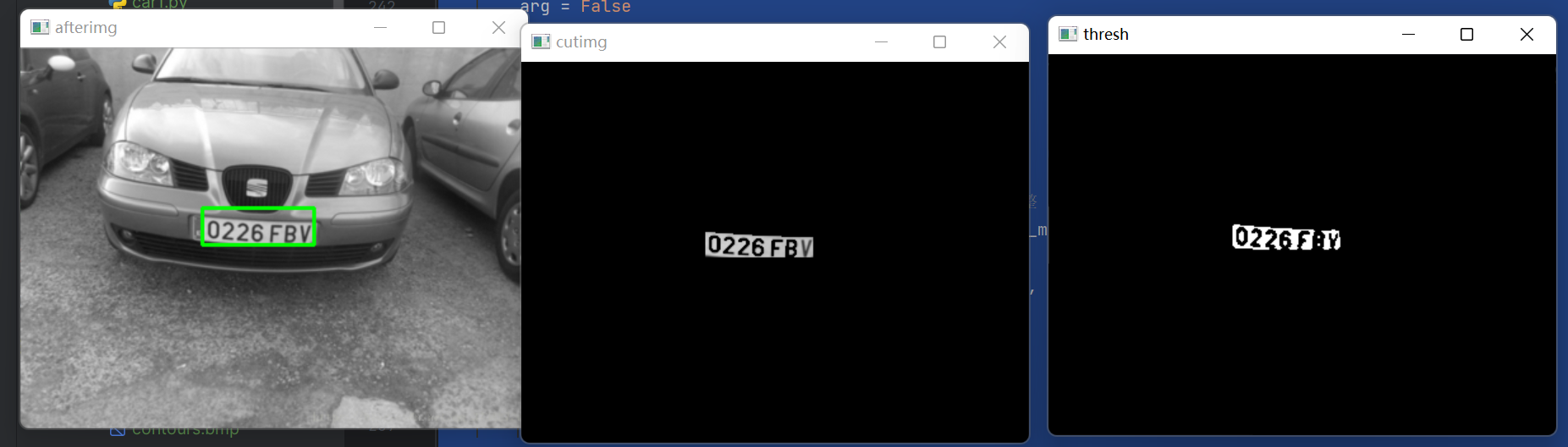
可见车牌定位成功,下一步是识别字符。
代码示例:基于tesseract 识别车牌字符
-
安装步骤:
Tesseract Ocr 工具安装,下面是下载地址,下载后 用管理员安装,安装的时候注意 记住自己的安装路径。
https://www.aliyundrive.com/s/xHi1Y28LGjv -
安装python pytesseract 库包
pip install pytesseract
pytesseract 配置。
找到pytesseract 刚才的安装路径,如下

然后打开这个文件,
这里填上你自己的安装路径地址,至此,字符识别开发环境就准备好了。
import cv2 as cv
from PIL import Image
import pytesseract as tessdef recoginse_text(image):"""步骤:1、灰度,二值化处理2、形态学操作去噪3、识别:param image::return:"""# 灰度 二值化gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)# 如果是白底黑字 建议 _INVret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV | cv.THRESH_OTSU)# 形态学操作 (根据需要设置参数(1,2))kernel = cv.getStructuringElement(cv.MORPH_RECT, (1, 2)) # 去除横向细线morph1 = cv.morphologyEx(binary, cv.MORPH_OPEN, kernel)kernel = cv.getStructuringElement(cv.MORPH_RECT, (2, 1)) # 去除纵向细线morph2 = cv.morphologyEx(morph1, cv.MORPH_OPEN, kernel)cv.imshow("Morph", morph2)# 黑底白字取非,变为白底黑字(便于pytesseract 识别)cv.bitwise_not(morph2, morph2)textImage = Image.fromarray(morph2)# 图片转文字text = tess.image_to_string(textImage)n = 10 # 根据不同国家车牌固定数目进行设置print("识别结果:")print(text[1:n])def main():# 读取需要识别的数字字母图片,并显示读到的原图src = cv.imread("cp.jpg")cv.imshow("src", src)# 识别recoginse_text(src)cv.waitKey(0)cv.destroyAllWindows()if __name__ == "__main__":main()
运行结果:
识别结果:
0226 F By
汉字识别
向校于数字和英文字符的识别,汽车车牌中的汉子字符识别的 难度更大。
- 预处理原始图像
- 对字符的原始特征进行提取
- 读取获取所得的最终特征
代码示例:中文车牌的识别
import tkinter as tk
from tkinter.filedialog import *
from tkinter import ttk
import tkinter.messagebox as mBox
#代码在下一个文件中
import predict
import cv2
from PIL import Image, ImageTk
import threading
import timeclass Surface(ttk.Frame):pic_path = ""viewhigh = 600viewwide = 600update_time = 0thread = Nonethread_run = Falsecamera = Nonecolor_transform = {"green": ("绿牌", "#55FF55"), "yello": ("黄牌", "#FFFF00"), "blue": ("蓝牌", "#6666FF")}def __init__(self, win):ttk.Frame.__init__(self, win)frame_left = ttk.Frame(self)frame_right1 = ttk.Frame(self)frame_right2 = ttk.Frame(self)win.title("车牌识别")win.state("zoomed")self.pack(fill=tk.BOTH, expand=tk.YES, padx="5", pady="5")frame_left.pack(side=tk.LEFT, expand=1, fill=tk.BOTH)frame_right1.pack(side=tk.TOP, expand=1, fill=tk.Y)frame_right2.pack(side=tk.RIGHT, expand=0)ttk.Label(frame_left, text='原图:').pack(anchor="nw")ttk.Label(frame_right1, text='车牌位置:').grid(column=0, row=0, sticky=tk.W)from_pic_ctl = ttk.Button(frame_right2, text="来自图片", width=20, command=self.from_pic)from_vedio_ctl = ttk.Button(frame_right2, text="来自摄像头", width=20, command=self.from_vedio)self.image_ctl = ttk.Label(frame_left)self.image_ctl.pack(anchor="nw")self.roi_ctl = ttk.Label(frame_right1)self.roi_ctl.grid(column=0, row=1, sticky=tk.W)ttk.Label(frame_right1, text='识别结果:').grid(column=0, row=2, sticky=tk.W)self.r_ctl = ttk.Label(frame_right1, text="")self.r_ctl.grid(column=0, row=3, sticky=tk.W)self.color_ctl = ttk.Label(frame_right1, text="", width="20")self.color_ctl.grid(column=0, row=4, sticky=tk.W)from_vedio_ctl.pack(anchor="se", pady="5")from_pic_ctl.pack(anchor="se", pady="5")self.predictor = predict.CardPredictor()self.predictor.train_svm()def get_imgtk(self, img_bgr):img = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)im = Image.fromarray(img)imgtk = ImageTk.PhotoImage(image=im)wide = imgtk.width()high = imgtk.height()if wide > self.viewwide or high > self.viewhigh:wide_factor = self.viewwide / widehigh_factor = self.viewhigh / highfactor = min(wide_factor, high_factor)wide = int(wide * factor)if wide <= 0: wide = 1high = int(high * factor)if high <= 0: high = 1im = im.resize((wide, high), Image.LANCZOS) # 在pillow的10.0.0版本中,ANTIALIAS方法被删除了,使用新的方法即可:imgtk = ImageTk.PhotoImage(image=im)return imgtkdef show_roi(self, r, roi, color):if r:roi = cv2.cvtColor(roi, cv2.COLOR_BGR2RGB)roi = Image.fromarray(roi)self.imgtk_roi = ImageTk.PhotoImage(image=roi)self.roi_ctl.configure(image=self.imgtk_roi, state='enable')self.r_ctl.configure(text=str(r))self.update_time = time.time()try:c = self.color_transform[color]self.color_ctl.configure(text=c[0], background=c[1], state='enable')except:self.color_ctl.configure(state='disabled')elif self.update_time + 8 < time.time():self.roi_ctl.configure(state='disabled')self.r_ctl.configure(text="")self.color_ctl.configure(state='disabled')def from_vedio(self):if self.thread_run:returnif self.camera is None:self.camera = cv2.VideoCapture(0)if not self.camera.isOpened():mBox.showwarning('警告', '摄像头打开失败!')self.camera = Nonereturnself.thread = threading.Thread(target=self.vedio_thread, args=(self,))self.thread.setDaemon(True)self.thread.start()self.thread_run = Truedef from_pic(self):self.thread_run = Falseself.pic_path = askopenfilename(title="选择识别图片", filetypes=[("jpg图片", "*.jpg")])if self.pic_path:img_bgr = predict.imreadex(self.pic_path)self.imgtk = self.get_imgtk(img_bgr)self.image_ctl.configure(image=self.imgtk)resize_rates = (1, 0.9, 0.8, 0.7, 0.6, 0.5, 0.4)for resize_rate in resize_rates:print("resize_rate:", resize_rate)try:r, roi, color = self.predictor.predict(img_bgr, resize_rate)except:continueif r:break# r, roi, color = self.predictor.predict(img_bgr, 1)self.show_roi(r, roi, color)@staticmethoddef vedio_thread(self):self.thread_run = Truepredict_time = time.time()while self.thread_run:_, img_bgr = self.camera.read()self.imgtk = self.get_imgtk(img_bgr)self.image_ctl.configure(image=self.imgtk)if time.time() - predict_time > 2:r, roi, color = self.predictor.predict(img_bgr)self.show_roi(r, roi, color)predict_time = time.time()print("run end")def close_window():print("destroy")if surface.thread_run:surface.thread_run = Falsesurface.thread.join(2.0)win.destroy()if __name__ == '__main__':win = tk.Tk()surface = Surface(win)win.protocol('WM_DELETE_WINDOW', close_window)win.mainloop()在上述代码中,先使用图像边缘和车牌颜色定位车牌再识别字符。车牌字符识别使用的算法是Opencv 的SVM,车牌字符识别在predict方法(perdict.py )中实现,代码如下:
import cv2
import numpy as np
from numpy.linalg import norm
import sys
import os
import jsonSZ = 20 #训练图片长宽
MAX_WIDTH = 1000 #原始图片最大宽度
Min_Area = 2000 #车牌区域允许最大面积
PROVINCE_START = 1000
#读取图片文件
def imreadex(filename):return cv2.imdecode(np.fromfile(filename, dtype=np.uint8), cv2.IMREAD_COLOR)def point_limit(point):if point[0] < 0:point[0] = 0if point[1] < 0:point[1] = 0#根据设定的阈值和图片直方图,找出波峰,用于分隔字符
def find_waves(threshold, histogram):up_point = -1#上升点is_peak = Falseif histogram[0] > threshold:up_point = 0is_peak = Truewave_peaks = []for i,x in enumerate(histogram):if is_peak and x < threshold:if i - up_point > 2:is_peak = Falsewave_peaks.append((up_point, i))elif not is_peak and x >= threshold:is_peak = Trueup_point = iif is_peak and up_point != -1 and i - up_point > 4:wave_peaks.append((up_point, i))return wave_peaks#根据找出的波峰,分隔图片,从而得到逐个字符图片
def seperate_card(img, waves):part_cards = []for wave in waves:part_cards.append(img[:, wave[0]:wave[1]])return part_cards#来自opencv的sample,用于svm训练
def deskew(img):m = cv2.moments(img)if abs(m['mu02']) < 1e-2:return img.copy()skew = m['mu11']/m['mu02']M = np.float32([[1, skew, -0.5*SZ*skew], [0, 1, 0]])img = cv2.warpAffine(img, M, (SZ, SZ), flags=cv2.WARP_INVERSE_MAP | cv2.INTER_LINEAR)return img
#来自opencv的sample,用于svm训练
def preprocess_hog(digits):samples = []for img in digits:gx = cv2.Sobel(img, cv2.CV_32F, 1, 0)gy = cv2.Sobel(img, cv2.CV_32F, 0, 1)mag, ang = cv2.cartToPolar(gx, gy)bin_n = 16bin = np.int32(bin_n*ang/(2*np.pi))bin_cells = bin[:10,:10], bin[10:,:10], bin[:10,10:], bin[10:,10:]mag_cells = mag[:10,:10], mag[10:,:10], mag[:10,10:], mag[10:,10:]hists = [np.bincount(b.ravel(), m.ravel(), bin_n) for b, m in zip(bin_cells, mag_cells)]hist = np.hstack(hists)# transform to Hellinger kerneleps = 1e-7hist /= hist.sum() + epshist = np.sqrt(hist)hist /= norm(hist) + epssamples.append(hist)return np.float32(samples)
#不能保证包括所有省份
provinces = [
"zh_cuan", "川",
"zh_e", "鄂",
"zh_gan", "赣",
"zh_gan1", "甘",
"zh_gui", "贵",
"zh_gui1", "桂",
"zh_hei", "黑",
"zh_hu", "沪",
"zh_ji", "冀",
"zh_jin", "津",
"zh_jing", "京",
"zh_jl", "吉",
"zh_liao", "辽",
"zh_lu", "鲁",
"zh_meng", "蒙",
"zh_min", "闽",
"zh_ning", "宁",
"zh_qing", "靑",
"zh_qiong", "琼",
"zh_shan", "陕",
"zh_su", "苏",
"zh_sx", "晋",
"zh_wan", "皖",
"zh_xiang", "湘",
"zh_xin", "新",
"zh_yu", "豫",
"zh_yu1", "渝",
"zh_yue", "粤",
"zh_yun", "云",
"zh_zang", "藏",
"zh_zhe", "浙"
]
class StatModel(object):def load(self, fn):self.model = self.model.load(fn) def save(self, fn):self.model.save(fn)
class SVM(StatModel):def __init__(self, C = 1, gamma = 0.5):self.model = cv2.ml.SVM_create()self.model.setGamma(gamma)self.model.setC(C)self.model.setKernel(cv2.ml.SVM_RBF)self.model.setType(cv2.ml.SVM_C_SVC)
#训练svmdef train(self, samples, responses):self.model.train(samples, cv2.ml.ROW_SAMPLE, responses)
#字符识别def predict(self, samples):r = self.model.predict(samples)return r[1].ravel()class CardPredictor:def __init__(self):#车牌识别的部分参数保存在js中,便于根据图片分辨率做调整f = open('config.js')j = json.load(f)for c in j["config"]:if c["open"]:self.cfg = c.copy()breakelse:raise RuntimeError('没有设置有效配置参数')def __del__(self):self.save_traindata()def train_svm(self):#识别英文字母和数字self.model = SVM(C=1, gamma=0.5)#识别中文self.modelchinese = SVM(C=1, gamma=0.5)if os.path.exists("svm.dat"):self.model.load("svm.dat")else:chars_train = []chars_label = []for root, dirs, files in os.walk("train\\chars2"):if len(os.path.basename(root)) > 1:continueroot_int = ord(os.path.basename(root))for filename in files:filepath = os.path.join(root,filename)digit_img = cv2.imread(filepath)digit_img = cv2.cvtColor(digit_img, cv2.COLOR_BGR2GRAY)chars_train.append(digit_img)#chars_label.append(1)chars_label.append(root_int)chars_train = list(map(deskew, chars_train))chars_train = preprocess_hog(chars_train)#chars_train = chars_train.reshape(-1, 20, 20).astype(np.float32)chars_label = np.array(chars_label)self.model.train(chars_train, chars_label)if os.path.exists("svmchinese.dat"):self.modelchinese.load("svmchinese.dat")else:chars_train = []chars_label = []for root, dirs, files in os.walk("train\\charsChinese"):if not os.path.basename(root).startswith("zh_"):continuepinyin = os.path.basename(root)index = provinces.index(pinyin) + PROVINCE_START + 1 #1是拼音对应的汉字for filename in files:filepath = os.path.join(root,filename)digit_img = cv2.imread(filepath)digit_img = cv2.cvtColor(digit_img, cv2.COLOR_BGR2GRAY)chars_train.append(digit_img)#chars_label.append(1)chars_label.append(index)chars_train = list(map(deskew, chars_train))chars_train = preprocess_hog(chars_train)#chars_train = chars_train.reshape(-1, 20, 20).astype(np.float32)chars_label = np.array(chars_label)print(chars_train.shape)self.modelchinese.train(chars_train, chars_label)def save_traindata(self):if not os.path.exists("svm.dat"):self.model.save("svm.dat")if not os.path.exists("svmchinese.dat"):self.modelchinese.save("svmchinese.dat")def accurate_place(self, card_img_hsv, limit1, limit2, color):row_num, col_num = card_img_hsv.shape[:2]xl = col_numxr = 0yh = 0yl = row_num#col_num_limit = self.cfg["col_num_limit"]row_num_limit = self.cfg["row_num_limit"]col_num_limit = col_num * 0.8 if color != "green" else col_num * 0.5#绿色有渐变for i in range(row_num):count = 0for j in range(col_num):H = card_img_hsv.item(i, j, 0)S = card_img_hsv.item(i, j, 1)V = card_img_hsv.item(i, j, 2)if limit1 < H <= limit2 and 34 < S and 46 < V:count += 1if count > col_num_limit:if yl > i:yl = iif yh < i:yh = ifor j in range(col_num):count = 0for i in range(row_num):H = card_img_hsv.item(i, j, 0)S = card_img_hsv.item(i, j, 1)V = card_img_hsv.item(i, j, 2)if limit1 < H <= limit2 and 34 < S and 46 < V:count += 1if count > row_num - row_num_limit:if xl > j:xl = jif xr < j:xr = jreturn xl, xr, yh, yldef predict(self, car_pic, resize_rate=1):if type(car_pic) == type(""):img = imreadex(car_pic)else:img = car_picpic_hight, pic_width = img.shape[:2]if pic_width > MAX_WIDTH:pic_rate = MAX_WIDTH / pic_widthimg = cv2.resize(img, (MAX_WIDTH, int(pic_hight*pic_rate)), interpolation=cv2.INTER_LANCZOS4)pic_hight, pic_width = img.shape[:2]if resize_rate != 1:img = cv2.resize(img, (int(pic_width*resize_rate), int(pic_hight*resize_rate)), interpolation=cv2.INTER_LANCZOS4)pic_hight, pic_width = img.shape[:2]print("h,w:", pic_hight, pic_width)blur = self.cfg["blur"]#高斯去噪if blur > 0:img = cv2.GaussianBlur(img, (blur, blur), 0)#图片分辨率调整oldimg = imgimg = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)#equ = cv2.equalizeHist(img)#img = np.hstack((img, equ))#去掉图像中不会是车牌的区域kernel = np.ones((20, 20), np.uint8)img_opening = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel)img_opening = cv2.addWeighted(img, 1, img_opening, -1, 0);#找到图像边缘ret, img_thresh = cv2.threshold(img_opening, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)img_edge = cv2.Canny(img_thresh, 100, 200)#使用开运算和闭运算让图像边缘成为一个整体kernel = np.ones((self.cfg["morphologyr"], self.cfg["morphologyc"]), np.uint8)img_edge1 = cv2.morphologyEx(img_edge, cv2.MORPH_CLOSE, kernel)img_edge2 = cv2.morphologyEx(img_edge1, cv2.MORPH_OPEN, kernel)#查找图像边缘整体形成的矩形区域,可能有很多,车牌就在其中一个矩形区域中try:contours, hierarchy = cv2.findContours(img_edge2, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)except ValueError:image, contours, hierarchy = cv2.findContours(img_edge2, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)contours = [cnt for cnt in contours if cv2.contourArea(cnt) > Min_Area]print('len(contours)', len(contours))#一一排除不是车牌的矩形区域car_contours = []for cnt in contours:rect = cv2.minAreaRect(cnt)area_width, area_height = rect[1]if area_width < area_height:area_width, area_height = area_height, area_widthwh_ratio = area_width / area_height#print(wh_ratio)#要求矩形区域长宽比在2到5.5之间,2到5.5是车牌的长宽比,其余的矩形排除if wh_ratio > 2 and wh_ratio < 5.5:car_contours.append(rect)box = cv2.boxPoints(rect)box = np.int0(box)#oldimg = cv2.drawContours(oldimg, [box], 0, (0, 0, 255), 2)#cv2.imshow("edge4", oldimg)#cv2.waitKey(0)print(len(car_contours))print("精确定位")card_imgs = []#矩形区域可能是倾斜的矩形,需要矫正,以便使用颜色定位for rect in car_contours:if rect[2] > -1 and rect[2] < 1:#创造角度,使得左、高、右、低拿到正确的值angle = 1else:angle = rect[2]rect = (rect[0], (rect[1][0]+5, rect[1][1]+5), angle)#扩大范围,避免车牌边缘被排除box = cv2.boxPoints(rect)heigth_point = right_point = [0, 0]left_point = low_point = [pic_width, pic_hight]for point in box:if left_point[0] > point[0]:left_point = pointif low_point[1] > point[1]:low_point = pointif heigth_point[1] < point[1]:heigth_point = pointif right_point[0] < point[0]:right_point = pointif left_point[1] <= right_point[1]:#正角度new_right_point = [right_point[0], heigth_point[1]]pts2 = np.float32([left_point, heigth_point, new_right_point])#字符只是高度需要改变pts1 = np.float32([left_point, heigth_point, right_point])M = cv2.getAffineTransform(pts1, pts2)dst = cv2.warpAffine(oldimg, M, (pic_width, pic_hight))point_limit(new_right_point)point_limit(heigth_point)point_limit(left_point)card_img = dst[int(left_point[1]):int(heigth_point[1]), int(left_point[0]):int(new_right_point[0])]card_imgs.append(card_img)#cv2.imshow("card", card_img)#cv2.waitKey(0)elif left_point[1] > right_point[1]:#负角度new_left_point = [left_point[0], heigth_point[1]]pts2 = np.float32([new_left_point, heigth_point, right_point])#字符只是高度需要改变pts1 = np.float32([left_point, heigth_point, right_point])M = cv2.getAffineTransform(pts1, pts2)dst = cv2.warpAffine(oldimg, M, (pic_width, pic_hight))point_limit(right_point)point_limit(heigth_point)point_limit(new_left_point)card_img = dst[int(right_point[1]):int(heigth_point[1]), int(new_left_point[0]):int(right_point[0])]card_imgs.append(card_img)#cv2.imshow("card", card_img)#cv2.waitKey(0)#开始使用颜色定位,排除不是车牌的矩形,目前只识别蓝、绿、黄车牌colors = []for card_index,card_img in enumerate(card_imgs):green = yello = blue = black = white = 0card_img_hsv = cv2.cvtColor(card_img, cv2.COLOR_BGR2HSV)#有转换失败的可能,原因来自于上面矫正矩形出错if card_img_hsv is None:continuerow_num, col_num= card_img_hsv.shape[:2]card_img_count = row_num * col_numfor i in range(row_num):for j in range(col_num):H = card_img_hsv.item(i, j, 0)S = card_img_hsv.item(i, j, 1)V = card_img_hsv.item(i, j, 2)if 11 < H <= 34 and S > 34:#图片分辨率调整yello += 1elif 35 < H <= 99 and S > 34:#图片分辨率调整green += 1elif 99 < H <= 124 and S > 34:#图片分辨率调整blue += 1if 0 < H <180 and 0 < S < 255 and 0 < V < 46:black += 1elif 0 < H <180 and 0 < S < 43 and 221 < V < 225:white += 1color = "no"limit1 = limit2 = 0if yello*2 >= card_img_count:color = "yello"limit1 = 11limit2 = 34#有的图片有色偏偏绿elif green*2 >= card_img_count:color = "green"limit1 = 35limit2 = 99elif blue*2 >= card_img_count:color = "blue"limit1 = 100limit2 = 124#有的图片有色偏偏紫elif black + white >= card_img_count*0.7:#TODOcolor = "bw"print(color)colors.append(color)print(blue, green, yello, black, white, card_img_count)#cv2.imshow("color", card_img)#cv2.waitKey(0)if limit1 == 0:continue#以上为确定车牌颜色#以下为根据车牌颜色再定位,缩小边缘非车牌边界xl, xr, yh, yl = self.accurate_place(card_img_hsv, limit1, limit2, color)if yl == yh and xl == xr:continueneed_accurate = Falseif yl >= yh:yl = 0yh = row_numneed_accurate = Trueif xl >= xr:xl = 0xr = col_numneed_accurate = Truecard_imgs[card_index] = card_img[yl:yh, xl:xr] if color != "green" or yl < (yh-yl)//4 else card_img[yl-(yh-yl)//4:yh, xl:xr]if need_accurate:#可能x或y方向未缩小,需要再试一次card_img = card_imgs[card_index]card_img_hsv = cv2.cvtColor(card_img, cv2.COLOR_BGR2HSV)xl, xr, yh, yl = self.accurate_place(card_img_hsv, limit1, limit2, color)if yl == yh and xl == xr:continueif yl >= yh:yl = 0yh = row_numif xl >= xr:xl = 0xr = col_numcard_imgs[card_index] = card_img[yl:yh, xl:xr] if color != "green" or yl < (yh-yl)//4 else card_img[yl-(yh-yl)//4:yh, xl:xr]#以上为车牌定位#以下为识别车牌中的字符predict_result = []roi = Nonecard_color = Nonefor i, color in enumerate(colors):if color in ("blue", "yello", "green"):card_img = card_imgs[i]gray_img = cv2.cvtColor(card_img, cv2.COLOR_BGR2GRAY)#黄、绿车牌字符比背景暗、与蓝车牌刚好相反,所以黄、绿车牌需要反向if color == "green" or color == "yello":gray_img = cv2.bitwise_not(gray_img)ret, gray_img = cv2.threshold(gray_img, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)#查找水平直方图波峰x_histogram = np.sum(gray_img, axis=1)x_min = np.min(x_histogram)x_average = np.sum(x_histogram)/x_histogram.shape[0]x_threshold = (x_min + x_average)/2wave_peaks = find_waves(x_threshold, x_histogram)if len(wave_peaks) == 0:print("peak less 0:")continue#认为水平方向,最大的波峰为车牌区域wave = max(wave_peaks, key=lambda x:x[1]-x[0])gray_img = gray_img[wave[0]:wave[1]]#查找垂直直方图波峰row_num, col_num= gray_img.shape[:2]#去掉车牌上下边缘1个像素,避免白边影响阈值判断gray_img = gray_img[1:row_num-1]y_histogram = np.sum(gray_img, axis=0)y_min = np.min(y_histogram)y_average = np.sum(y_histogram)/y_histogram.shape[0]y_threshold = (y_min + y_average)/5#U和0要求阈值偏小,否则U和0会被分成两半wave_peaks = find_waves(y_threshold, y_histogram)#for wave in wave_peaks:# cv2.line(card_img, pt1=(wave[0], 5), pt2=(wave[1], 5), color=(0, 0, 255), thickness=2) #车牌字符数应大于6if len(wave_peaks) <= 6:print("peak less 1:", len(wave_peaks))continuewave = max(wave_peaks, key=lambda x:x[1]-x[0])max_wave_dis = wave[1] - wave[0]#判断是否是左侧车牌边缘if wave_peaks[0][1] - wave_peaks[0][0] < max_wave_dis/3 and wave_peaks[0][0] == 0:wave_peaks.pop(0)#组合分离汉字cur_dis = 0for i,wave in enumerate(wave_peaks):if wave[1] - wave[0] + cur_dis > max_wave_dis * 0.6:breakelse:cur_dis += wave[1] - wave[0]if i > 0:wave = (wave_peaks[0][0], wave_peaks[i][1])wave_peaks = wave_peaks[i+1:]wave_peaks.insert(0, wave)#去除车牌上的分隔点point = wave_peaks[2]if point[1] - point[0] < max_wave_dis/3:point_img = gray_img[:,point[0]:point[1]]if np.mean(point_img) < 255/5:wave_peaks.pop(2)if len(wave_peaks) <= 6:print("peak less 2:", len(wave_peaks))continuepart_cards = seperate_card(gray_img, wave_peaks)for i, part_card in enumerate(part_cards):#可能是固定车牌的铆钉if np.mean(part_card) < 255/5:print("a point")continuepart_card_old = part_card#w = abs(part_card.shape[1] - SZ)//2w = part_card.shape[1] // 3part_card = cv2.copyMakeBorder(part_card, 0, 0, w, w, cv2.BORDER_CONSTANT, value = [0,0,0])part_card = cv2.resize(part_card, (SZ, SZ), interpolation=cv2.INTER_AREA)#cv2.imshow("part", part_card_old)#cv2.waitKey(0)#cv2.imwrite("u.jpg", part_card)#part_card = deskew(part_card)part_card = preprocess_hog([part_card])if i == 0:resp = self.modelchinese.predict(part_card)charactor = provinces[int(resp[0]) - PROVINCE_START]else:resp = self.model.predict(part_card)charactor = chr(resp[0])#判断最后一个数是否是车牌边缘,假设车牌边缘被认为是1if charactor == "1" and i == len(part_cards)-1:if part_card_old.shape[0]/part_card_old.shape[1] >= 8:#1太细,认为是边缘print(part_card_old.shape)continuepredict_result.append(charactor)roi = card_imgcard_color = colorbreakreturn predict_result, roi, card_color#识别到的字符、定位的车牌图像、车牌颜色if __name__ == '__main__':c = CardPredictor()c.train_svm()r, roi, color = c.predict("car2.jpg")print(r)运行第一个文件会弹出一个选择框;
选个图片
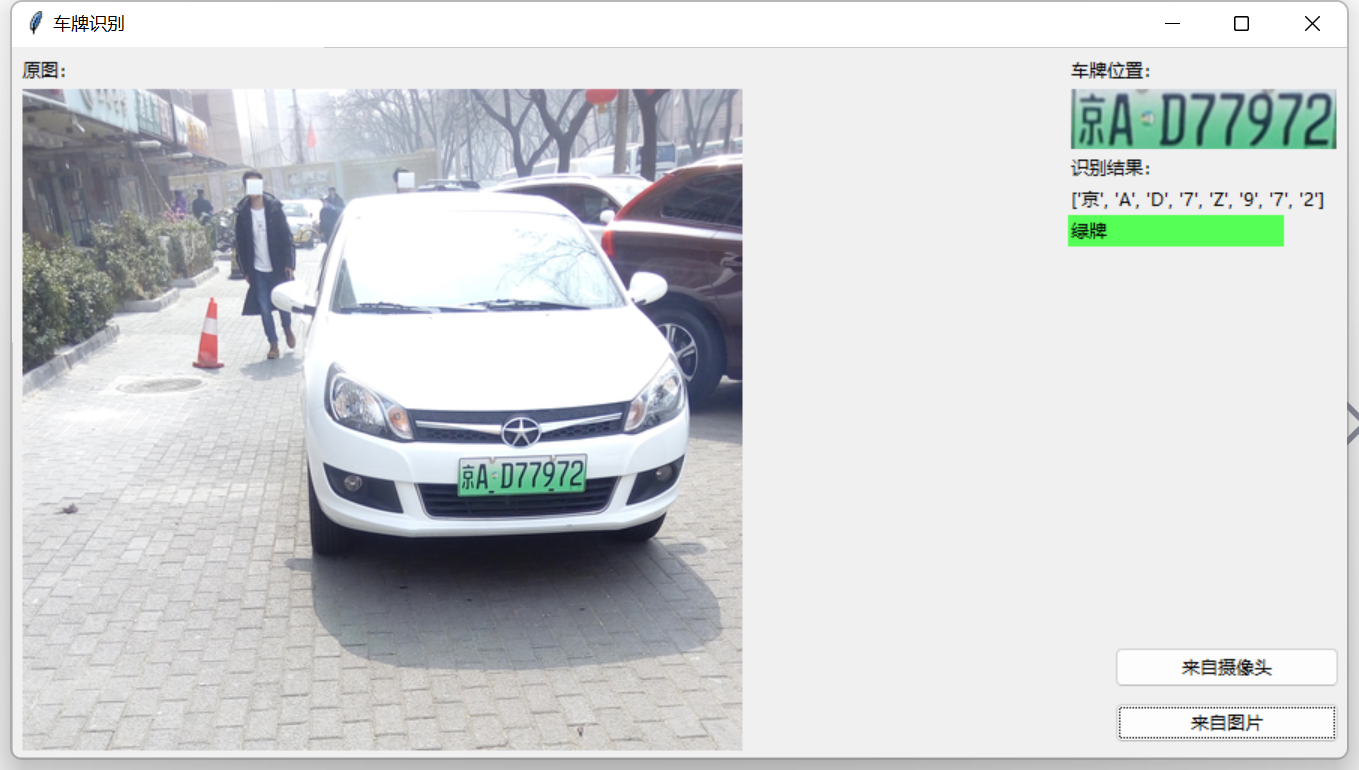

运行结果:
['京', 'A', 'D', '7', 'Z', '9', '7', '2']
看来还是需要在训练下模型。后续补充新模型验证测试。
代码中涉及的文件下载地址
下载
https://download.csdn.net/download/hai411741962/88244933
相关文章:
opencv 案例实战01-停车场车牌识别实战
需求分析: 车牌识别技术主要应用领域有停车场收费管理,交通流量控制指标测量,车辆定位,汽车防盗,高速公路超速自动化监管、闯红灯电子警察、公路收费站等等功能。对于维护交通安全和城市治安,防止交通堵塞…...
【PHP】PHP开发教程-PHP开发环境安装
1、PHP简单介绍 PHP(全称:Hypertext Preprocessor)是一种广泛使用的开放源代码脚本语言,特别适用于Web开发。它嵌入在HTML中,通过在HTML文档中添加PHP标记和脚本,可以生成动态的、个性化的Web页面。 PHP最…...
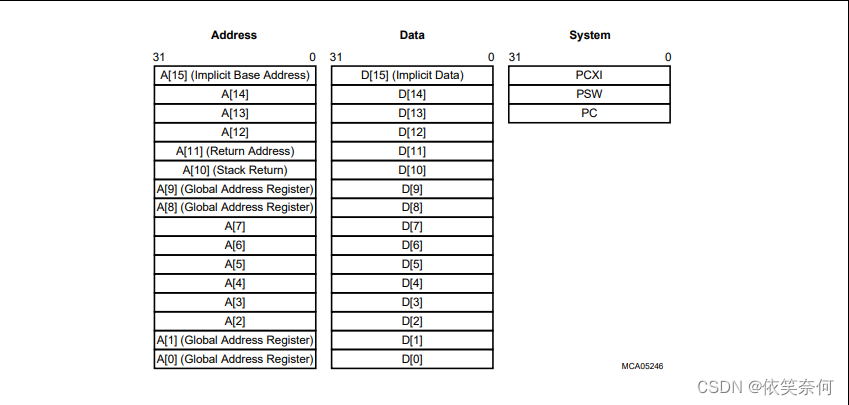
AURIX TriCore内核架构学习笔记
名词缩写 ISA - Instruction Set Architecture,指令集架构PC - Program Counter, holds the address of the instruction that is currently runningGPRs - 32 General Purpose RegistersPSW - Program Status WordPCXI - Previous Context InformationCSA - Conte…...

VMware ESXi 7.0 优化VMFSL磁盘占用与系统存储大小
文章目录 VMware ESXi 7.0 优化VMFSL磁盘占用与系统存储大小引言创建ESXi7.0可启动 U 盘结果检查VMware ESXi 7.0 优化VMFSL磁盘占用与系统存储大小 引言 本文讲述了在 J1900平台上安装ESXi7.0时减少 VMFSL 分区占用的说明, 通常这来说些主机内置的磁盘空间非常小, 采用默认安…...

4.网络设计与redis、memcached、nginx组件(二)
系列文章目录 第四章 网络设计与redis、memcached、nginx组件(一) 第五章 网络设计与redis、memcached、nginx组件(二) 文章目录 系列文章目录[TOC](文章目录) 前言一、reactor模型?二、Reactor 开发1.建立连接 三、典型reactor 模型单reactor 模型典型 readisradi…...
后端开发有哪几种语言? - 易智编译EaseEditing
后端开发是构建应用程序的一部分,负责处理服务器端的逻辑、数据库交互和数据处理。有许多编程语言可用于后端开发,以下是一些常见的后端开发语言: Java: Java是一种广泛使用的面向对象编程语言,具有强大的跨平台能力。…...
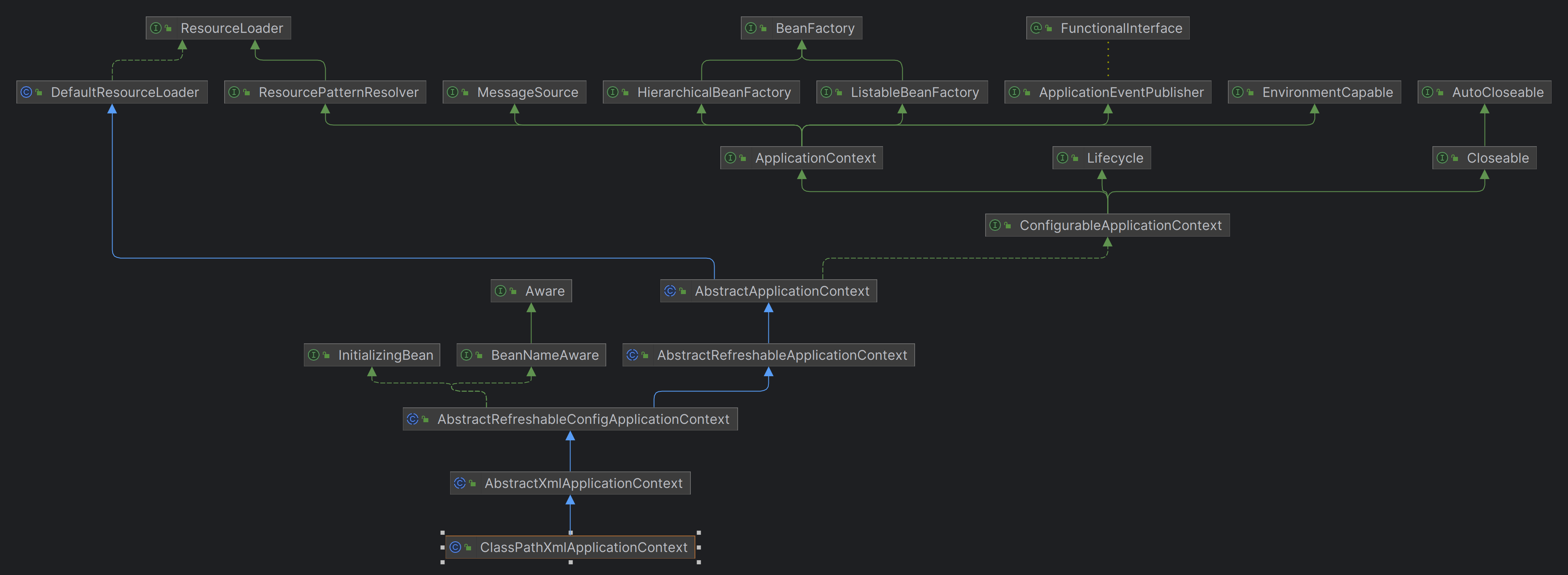
Spring 学习源码的基础 核心原理与核心概念
文章目录 核心原理AnnotationConfigApplicationContextIoC 容器加载流程Spring 中如何创建一个对象Bean 的创建过程 (生命周期)单例 原型推断构造方法依赖注入AOP 动态代理判断是否需要 AOP 的大致流程CGLib 做 AOP 的大致流程事务事务代理对象执行方法的流程事务注解排至失效的…...
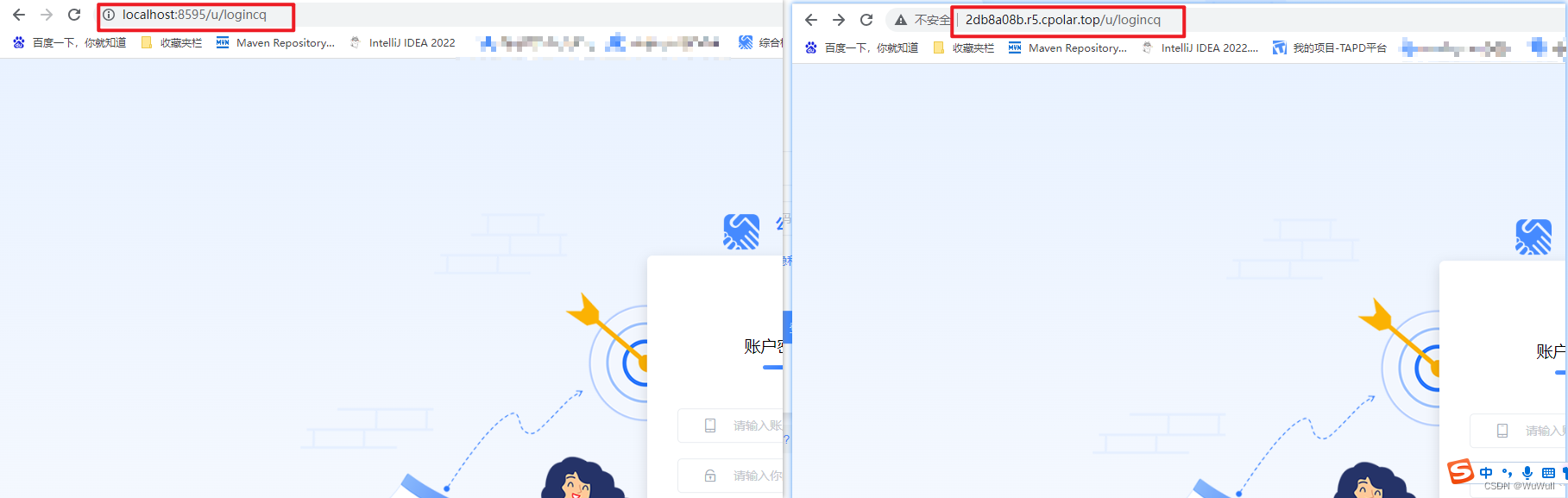
cpolar做一个内网穿透
因为不在公司,需要访问公司的数据库,所以做一个内网穿透 下载安装 下载地址: https://dashboard.cpolar.com/get-started 下载后是个压缩包,解压后傻瓜式安装 操作隧道 安装后打开Cpolar Web UI 登录账号,查看隧…...
工程化总结)
自动驾驶——最优控制算法(LQR)工程化总结
1. Summary 时隔一年,从写下第一篇博文自动驾驶-LQR工程实现(调研),到近段时间,真正在我们的控制器上运行最优控制算法(LQR),一步一个脚印,从开始只是知道其“控制理论”…...
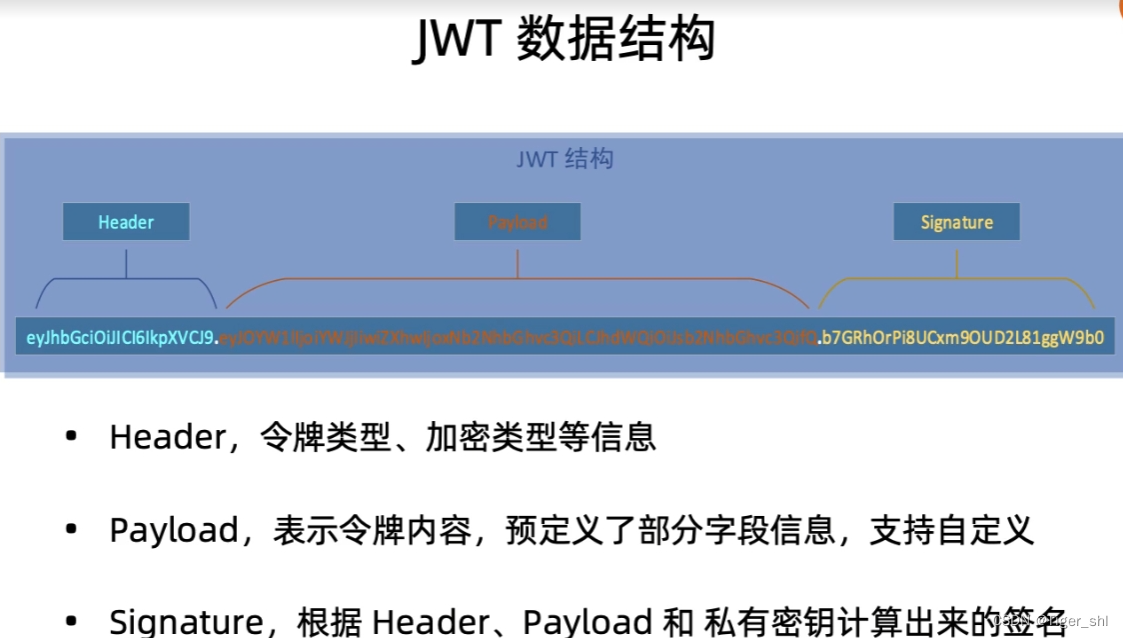
【微服务】05-网关与BFF(Backend For Frontend)
文章目录 1.打造网关1.1 简介1.2 连接模式1.3 打造网关 2.身份认证与授权2.1 身份认证方案2.1.1 JWT是什么2.1.2 启用JwtBearer身份认证2.1.3 配置身份认证2.1.4 JWT注意事项 1.打造网关 1.1 简介 BFF(Backend For Frontend)负责认证授权,服务聚合,目标…...

保证MQ的高可用的几种方案
推荐阅读 AI文本 OCR识别最佳实践 AI Gamma一键生成PPT工具直达链接 玩转cloud Studio 在线编码神器 玩转 GPU AI绘画、AI讲话、翻译,GPU点亮AI想象空间 资源分享 史上最全文档AI绘画stablediffusion资料分享 AI绘画关于SD,MJ,GPT,SDXL百科全书 「java、python面试题」…...

MySql013——函数
一、数据处理函数 1.1、文本处理函数 函 数 说 明 Left() 返回串左边的字符Length() 返回串的长度Locate() 找出串的一个子串Lower() 将串转换为小写LTrim() 去掉串左边的空格Right() 返回串右边的字符RTrim() 去掉串右边的空格Soundex() 返回串…...
k8s-dashboard使用指导手册
一、访问 dashboard http://172.66.209.101:32001 二、选择 Namespace 如下图: 1 在①搜索框中输入 spms 2 在②选择 spms-cloud 三、查找 pod 1 打开 pod 列表 2 打开过滤窗口 3 搜索 pod 在打开的搜索框中输入 pod的关键字,支持模糊搜索 如搜索…...

Python爬虫快速入门指南
引言: 网络爬虫是一种自动化程序,可以在互联网上搜集和提取数据。Python作为一种功能强大且易学的编程语言,成为了许多爬虫开发者的首选。本文将为你提供一个关于Python爬虫的快速入门指南,包括基本概念、工具和实际案例。 第一…...

Java人脸识别技术探索与实践
人脸识别技术作为生物特征识别领域的一项重要应用,近年来在安全、便捷以及科研等方面取得了显著的进展。在Java编程领域,人脸识别也得到了广泛的关注和应用。本文将介绍Java中人脸识别技术的基本概念、常用库以及实际示例代码,带您深入了解这…...

【鞋服零售ERP】之要货申请单设计思路
引言 要货申请单在本系统中也是一张较为核心的单据,整体的思路是将其池化,解决收发货方业务简化,账务处理逻辑化的设计理念。首先鞋服零售ERP就是基于多组织的业务架构,多销售组织和店铺属性;其次是在零售如何在业处处…...
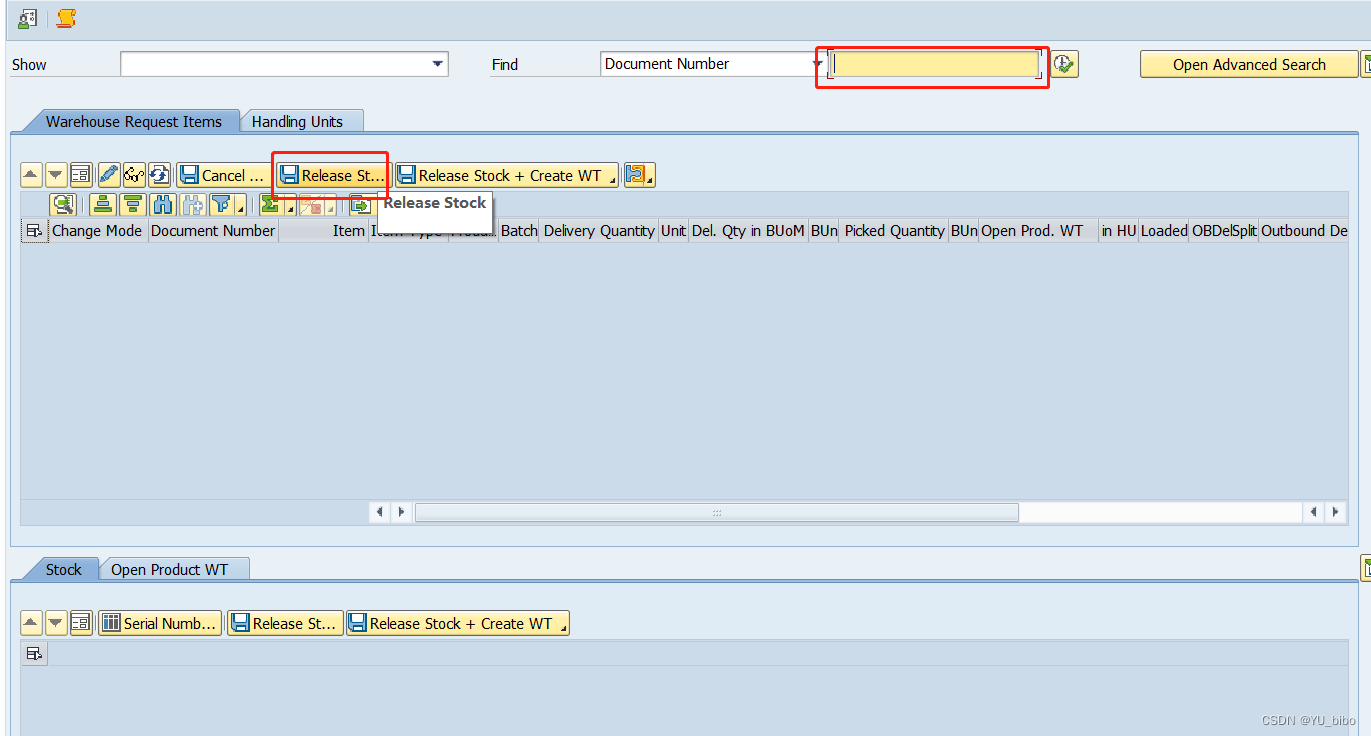
EWM怎么取消pinking,SAP_EWM取消拣配报错处理方式
EWM是SAP的一个模块,代表扩展仓库管理(Extended Warehouse Management),是SAP企业资源计划(ERP)的一部分。它提供了一个完整的、高级的仓库管理解决方案,支持企业在全球范围内的仓库管理、订单管…...

TensorFlow 的基本概念和使用场景
TensorFlow 是 Google 开源的机器学习框架,它支持使用数据流图(Data Flow Graph)的方式进行计算,以实现大规模分布式机器学习应用。TensorFlow 在深度学习、自然语言处理、计算机视觉等领域有广泛应用。 TensorFlow 中的重要概念…...
、解密(decrypt)、签名(sign)、验证(verify))
openssl 加密(encrypt)、解密(decrypt)、签名(sign)、验证(verify)
一、使用openssl rsautl 进行加密、解密、签名、验证 [kyzjjyyzc-zjjcs04 openssl]$ openssl rsautl --help Usage: rsautl [options] -in file input file -out file output file -inkey file input key -keyform arg private key format - default PEM …...
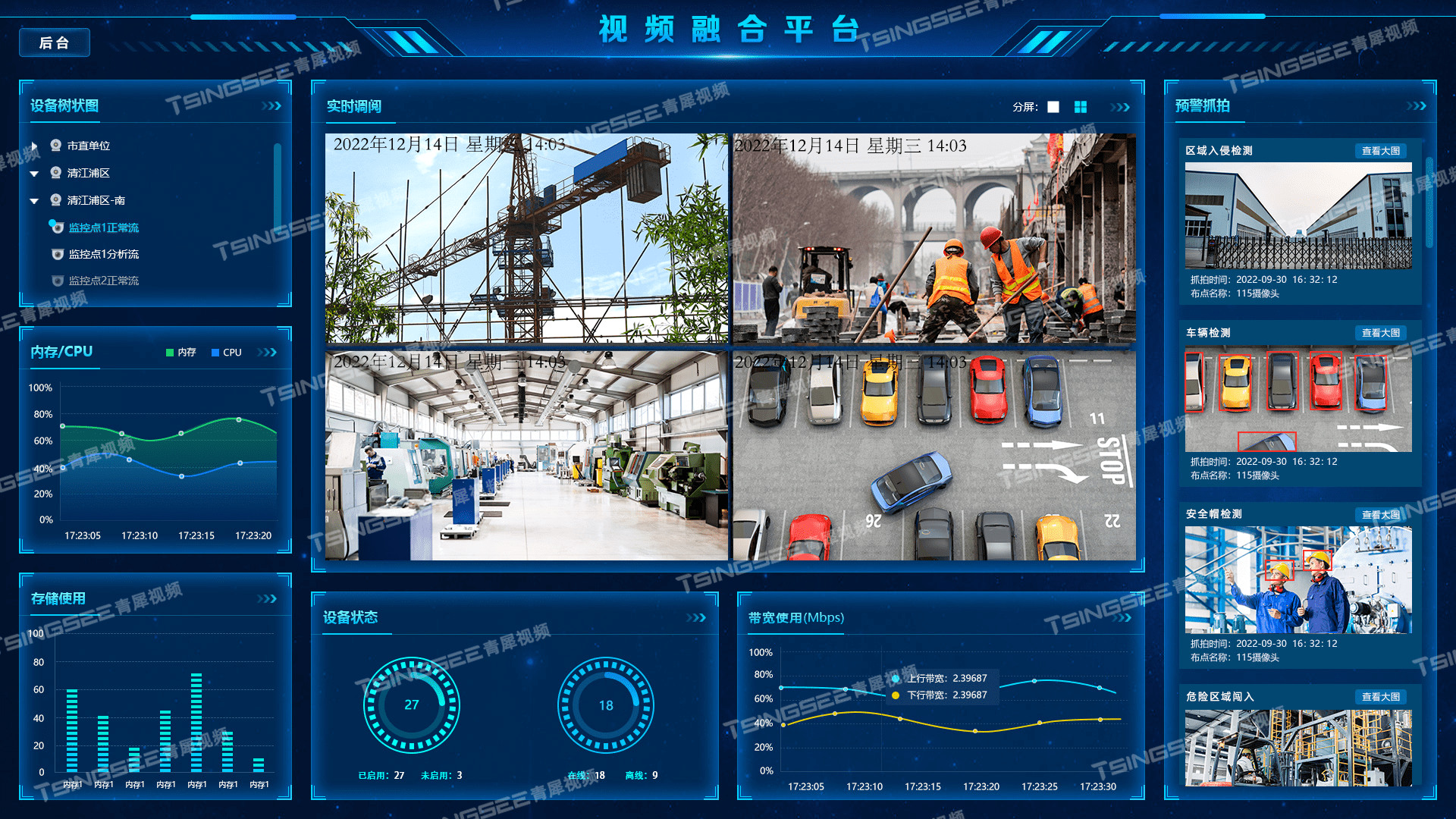
视频云存储/安防监控视频AI智能分析网关V3:抽烟/打电话功能详解
人工智能技术已经越来越多地融入到视频监控领域中,近期我们也发布了基于AI智能视频云存储/安防监控视频AI智能分析平台的众多新功能,该平台内置多种AI算法,可对实时视频中的人脸、人体、物体等进行检测、跟踪与抓拍,支持口罩佩戴检…...
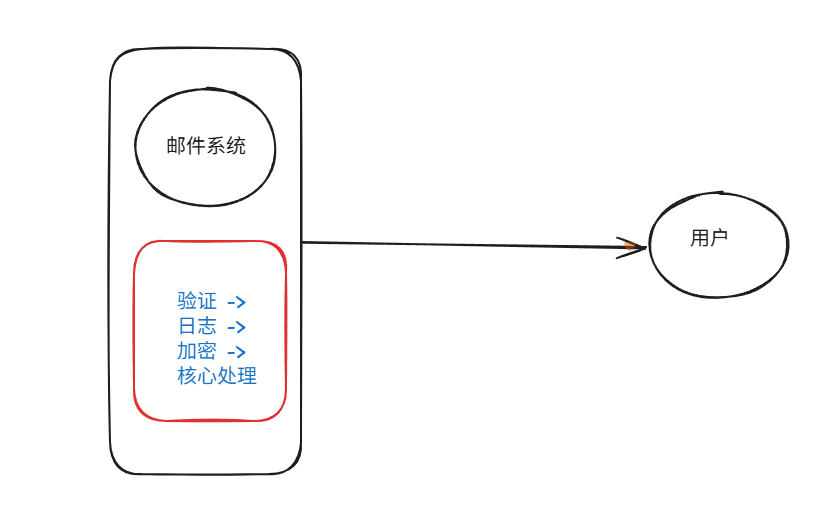
装饰模式(Decorator Pattern)重构java邮件发奖系统实战
前言 现在我们有个如下的需求,设计一个邮件发奖的小系统, 需求 1.数据验证 → 2. 敏感信息加密 → 3. 日志记录 → 4. 实际发送邮件 装饰器模式(Decorator Pattern)允许向一个现有的对象添加新的功能,同时又不改变其…...
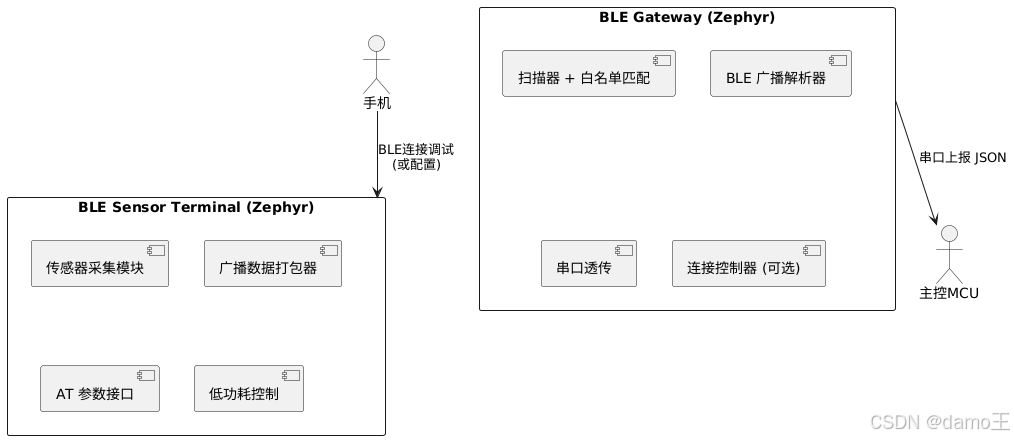
【Zephyr 系列 10】实战项目:打造一个蓝牙传感器终端 + 网关系统(完整架构与全栈实现)
🧠关键词:Zephyr、BLE、终端、网关、广播、连接、传感器、数据采集、低功耗、系统集成 📌目标读者:希望基于 Zephyr 构建 BLE 系统架构、实现终端与网关协作、具备产品交付能力的开发者 📊篇幅字数:约 5200 字 ✨ 项目总览 在物联网实际项目中,**“终端 + 网关”**是…...

【HTML-16】深入理解HTML中的块元素与行内元素
HTML元素根据其显示特性可以分为两大类:块元素(Block-level Elements)和行内元素(Inline Elements)。理解这两者的区别对于构建良好的网页布局至关重要。本文将全面解析这两种元素的特性、区别以及实际应用场景。 1. 块元素(Block-level Elements) 1.1 基本特性 …...
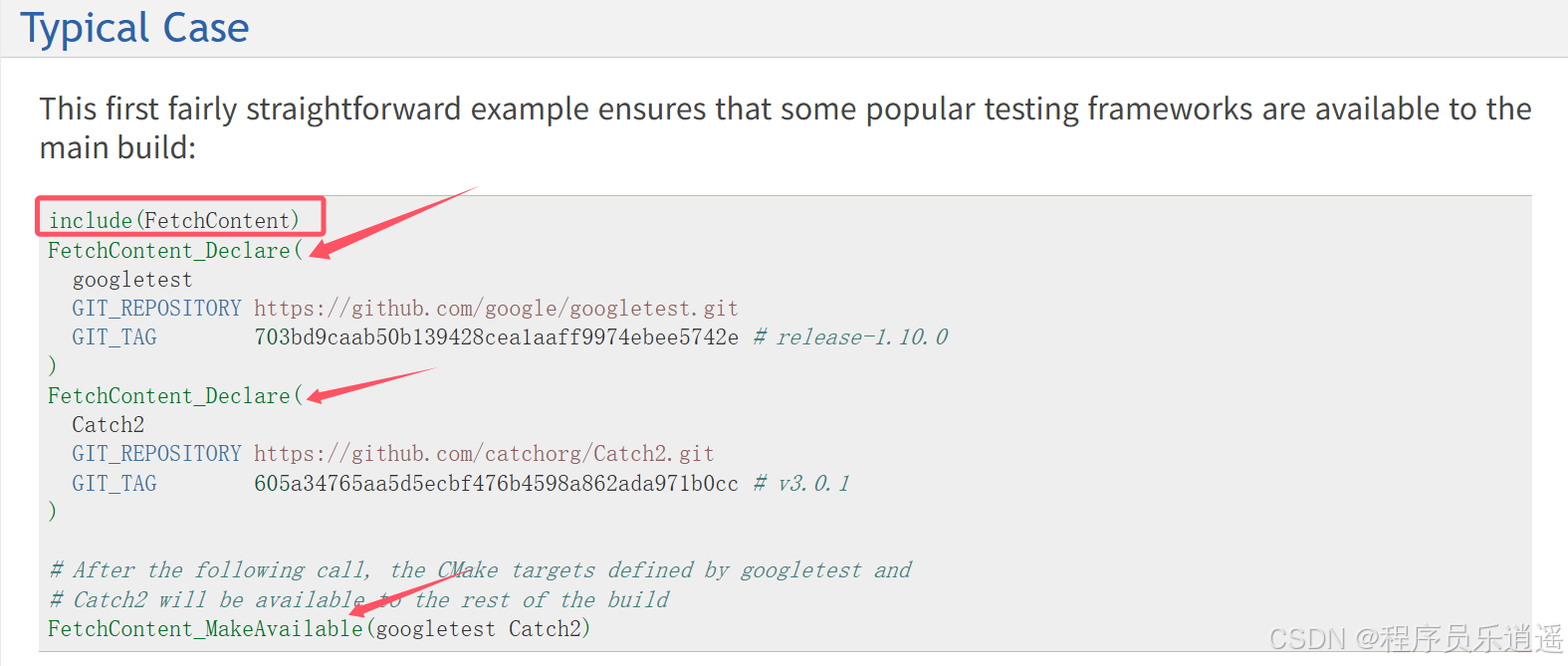
CMake 从 GitHub 下载第三方库并使用
有时我们希望直接使用 GitHub 上的开源库,而不想手动下载、编译和安装。 可以利用 CMake 提供的 FetchContent 模块来实现自动下载、构建和链接第三方库。 FetchContent 命令官方文档✅ 示例代码 我们将以 fmt 这个流行的格式化库为例,演示如何: 使用 FetchContent 从 GitH…...

2023赣州旅游投资集团
单选题 1.“不登高山,不知天之高也;不临深溪,不知地之厚也。”这句话说明_____。 A、人的意识具有创造性 B、人的认识是独立于实践之外的 C、实践在认识过程中具有决定作用 D、人的一切知识都是从直接经验中获得的 参考答案: C 本题解…...

Xen Server服务器释放磁盘空间
disk.sh #!/bin/bashcd /run/sr-mount/e54f0646-ae11-0457-b64f-eba4673b824c # 全部虚拟机物理磁盘文件存储 a$(ls -l | awk {print $NF} | cut -d. -f1) # 使用中的虚拟机物理磁盘文件 b$(xe vm-disk-list --multiple | grep uuid | awk {print $NF})printf "%s\n"…...

MySQL JOIN 表过多的优化思路
当 MySQL 查询涉及大量表 JOIN 时,性能会显著下降。以下是优化思路和简易实现方法: 一、核心优化思路 减少 JOIN 数量 数据冗余:添加必要的冗余字段(如订单表直接存储用户名)合并表:将频繁关联的小表合并成…...

如何配置一个sql server使得其它用户可以通过excel odbc获取数据
要让其他用户通过 Excel 使用 ODBC 连接到 SQL Server 获取数据,你需要完成以下配置步骤: ✅ 一、在 SQL Server 端配置(服务器设置) 1. 启用 TCP/IP 协议 打开 “SQL Server 配置管理器”。导航到:SQL Server 网络配…...

[USACO23FEB] Bakery S
题目描述 Bessie 开了一家面包店! 在她的面包店里,Bessie 有一个烤箱,可以在 t C t_C tC 的时间内生产一块饼干或在 t M t_M tM 单位时间内生产一块松糕。 ( 1 ≤ t C , t M ≤ 10 9 ) (1 \le t_C,t_M \le 10^9) (1≤tC,tM≤109)。由于空间…...
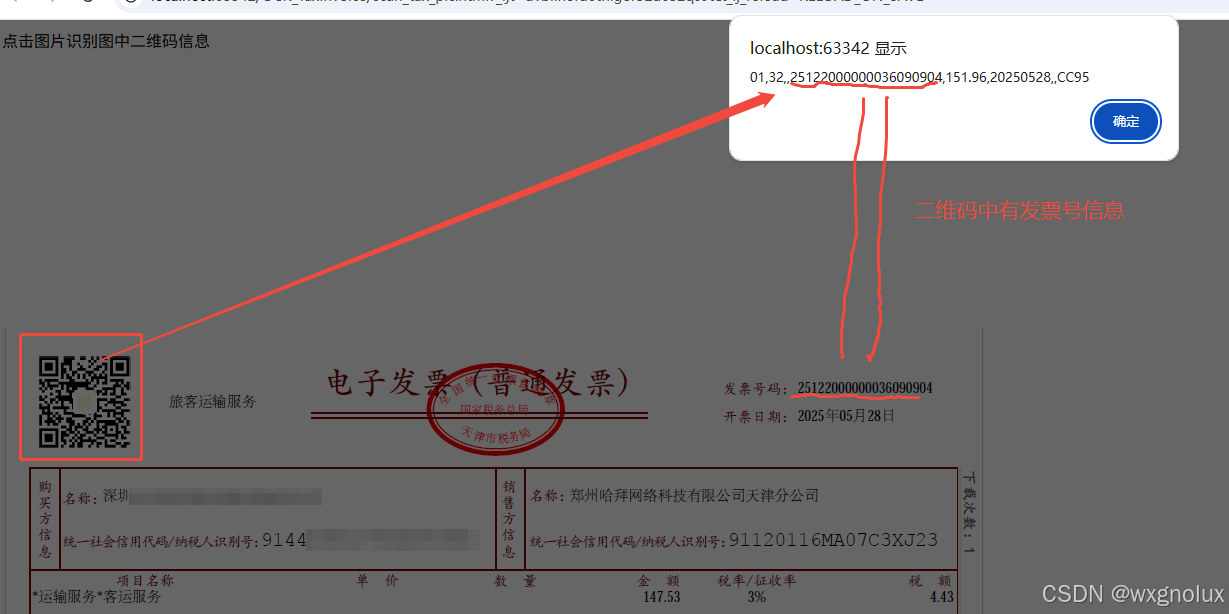
网页端 js 读取发票里的二维码信息(图片和PDF格式)
起因 为了实现在报销流程中,发票不能重用的限制,发票上传后,希望能读出发票号,并记录发票号已用,下次不再可用于报销。 基于上面的需求,研究了OCR 的方式和读PDF的方式,实际是可行的ÿ…...