(一)KITTI数据集用于3D目标检测
KITTI数据集介绍
数据基本情况
KITTI是德国卡尔斯鲁厄科技学院和丰田芝加哥研究院开源的数据集,最早发布于2012年03月20号。
对应的论文Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite发表在CVPR2012上。
KITTI数据集搜集自德国卡尔斯鲁厄市,包括市区/郊区/高速公路等交通场景。采集于2011年09月26/28/29/30号及10月03号的白天。
KITTI数据采集使用的平台如下图,

上面平台中包括
- 2个140万像素的黑白相机
- 2个140万像素的彩色相机
- 4个爱特蒙特光学镜头
- 1个64线 Velodyne 3D激光扫描仪
- 1个OXTS RT3003 惯导系统
从上图中可以看到
- 相机的坐标系,Z轴是朝前的,Y轴是朝下的,整个坐标系是右手坐标系。
- 激光雷达的X轴是朝向正前方,Z轴是竖直向上的,Y轴根据右手定则确定
IMU/GPS系统的坐标系朝向和激光雷达一致
总结,KITTI数据集是由4个相机,1个激光雷达,1个IMU/GPS惯导系统共同组成,我们所要厘清的是这6个传感器之间的坐标系关系和时间同步信息。
关于传感器的尺寸参数可以参考下图,

在[date]-drive-sync-[sqquence]目录下存放了6个传感器对应的采集数据文件夹。
- image00
- image01
- image02
- image03
- oxts
- velodyne-points
-
时间戳,在
velodyne-points文件夹下有三个时间戳文件timestamps_start.txt,激光扫描仪一周开始扫描的时间timestamps_end.txt,激光扫描仪一周扫描结束的时间timestamps.txt激光扫描到正前方触发相机拍照的时间。
-
图像数据
- 图像是裁剪掉了引擎盖和天空之后的图像
- 图像是去畸变之后的数据
-
OSTX数据,每一帧存储了包括经纬度/速度/加速度等
30个不同的字段值 -
雷达数据
- 浮点数的二进制文件,每个点由4个浮点数组成,雷达坐标系下的
x,y,z坐标,激光的反射强度r - 每扫描一次,大约得到了
120000个3D点。 - 激光雷达绕垂直轴逆时针转动
- 浮点数的二进制文件,每个点由4个浮点数组成,雷达坐标系下的
传感器标定及时间同步
整个系统以激光雷达旋转一周为1帧,激光雷达旋转到某个特定位置的时候,通过一个弹簧片的物理接触触发相机拍照,IMU无法通过这种触发的方式采集数据,但IMU数据采集的频率达到了100HZ,对IMU采集的数据记录时间戳,选择与相机采集时间最接近的作为当前帧的数据,最大时间误差为5ms。
相机标定,相机内外参标定使用的方法是A toolbox for
automatic calibration of range and camera sensors using a single shot,所有的相机中心都已对齐,即他们都在相同的XY平面上,这便于图像的校正(去除天空和引擎盖)
每天开始采集数据前,都会对整个数据采集系统进行标定,以免传感器间位置的偏移。
在每天的date_calib.zip文件夹下,有3个文本文件,
-
calib_cam_to_cam.txt
其中最后三个参数值的解释下, s r e c t ( i ) s^{(i)}_{rect} srect(i)表示的是校正后(去除多余的天空和引擎盖)图像的大小; R r e c t ( i ) \bold{R}^{(i)}_{rect} Rrect(i)是校正所用的旋转矩阵; P r e c t ( i ) \bold{P}^{(i)}_{rect} Prect(i)是校正所用投影矩阵。 i ∈ { 0 , 1 , 2 , 3 } i\in\{0,1,2,3\} i∈{0,1,2,3}表示相机的序号,0表示左侧灰度相机,1表示右侧灰度相机,2表示左侧彩色相机,3表示右侧彩色相机。左侧灰度相机0作为参考相机坐标系,参考相机坐标系下的一个3D点 x = ( x , y , z , 1 ) \bold{x}=(x,y,z,1) x=(x,y,z,1),要变换到第i个相机图像中,可使用如下关系: y = P r e c t ( i ) R r e c t ( 0 ) x \bold{y}=\bold{P}^{(i)}_{rect}\bold{R}^{(0)}_{rect}\bold{x} y=Prect(i)Rrect(0)x -
calib_velo_to_cam.txt,KITTI数据集激光雷达也是相对于左侧灰度相机0标定的,由激光到相机的旋转矩阵 R v e l o c a m \bold{R}^{cam}_{velo} Rvelocam和平移向量 t v e l o c a m \bold{t}^{cam}_{velo} tvelocam组成,齐次变换矩阵可以写成,
T v e l o c a m = ( R v e l o c a m t v e l o c a m 0 1 ) \bold{T}^{cam}_{velo}=\begin{pmatrix}R^{cam}_{velo} &t^{cam}_{velo} \\0 &1\end{pmatrix} Tvelocam=(Rvelocam0tvelocam1)
如此,将雷达坐标系下的3D点变换到第 i i i个相机坐标系下时的公式为: y = P r e c t ( i ) R r e c t ( 0 ) T v e l o c a m x \bold{y}=\bold{P}^{(i)}_{rect}\bold{R}^{(0)}_{rect}\bold{T}^{cam}_{velo}\bold{x} y=Prect(i)Rrect(0)Tvelocamx -
calib_imu_to_velo.txt,这个文件中保存有imu坐标系到激光坐标系下的齐次变换矩阵 T i m u v e l o \bold{T}_{imu}^{velo} Timuvelo,如此,将IMU坐标系下的一个3D点变换到第i个图像中的像素坐标的公式可写为
y = P r e c t ( i ) R r e c t ( 0 ) T v e l o c a m T i m u v e l o x \bold{y}=\bold{P}^{(i)}_{rect}\bold{R}^{(0)}_{rect}\bold{T}^{cam}_{velo}\bold{T}_{imu}^{velo}\bold{x} y=Prect(i)Rrect(0)TvelocamTimuvelox
用于3D目标检测
最初数据集支持的任务有双目,光流和里程计。后来,陆陆续续支持了深度估计、2D目标检测、3D目标检测、BEV目标检测、语义分割、实例分割、多目标追踪等任务。
在目标检测中,定义的类别有8种:
Car/Van/Truck/Pedestrian/Person_sitting/Cyclist/Tram/Misc(其他)。
对3D对象的标注是在激光雷达坐标系下进行的,不过值得注意的一点是现在3D目标检测只由检测框中心点坐标xyz,检测框的长宽高length/width/height和检测框的偏航角yaw这7个自由度组成。

不过这里也有个很容易引起歧义的问题length/width/height分别是对应xyz的哪个轴呢?从下图可以看出length对应dx,width对应dy,height对应dz。整个3D框的标注在激光雷达坐标系下。

KITTI 3D目标检测数据集包括7481张训练数据,7518张测试数据。尽管KITTI数据集中包含了标注了8种对象,只有Car/Pedestrian标注的比较充分,KITTI官方用来评估算法, KITTI BenchMark中使用的3D检测框类别有3个,分别是Car/Pedestrian/Cyclist。
下载的3D目标检测数据集包含的文件夹有
image_02, 左目彩色png格式的图像label_02, 左目彩色图像中标注的对象标签calib, 传感器之间的坐标转换关系velodyne, 激光点云数据plane,在激光坐标系下,路面的平面方程
标签文件中每一行内容如下:
Pedestrian 0.00 0 -0.20 712.40 143.00 810.73 307.92 1.89 0.48 1.20 1.84 1.47 8.41 0.01
包含的字段有,
type目标的类型,如Car/Van…,1个字段truncated浮点数0-1,目标对象离开相机视野的比例,1个字段occluded整数0,1,2,3,0:全部可见,1:部分遮挡,2:大部分未遮挡,3:未知,1个字段alpha,对象的观测角,1个字段 [ − π , π ] [-\pi, \pi] [−π,π]bbox,2D检测框像素坐标,x1,y1,x2,y2,4个字段dimensions,3D对象的尺寸,height,width,length,单位是米,3个字段location,3D对象在相机坐标系下的中心坐标xyz,单位是mrotation_y,yaw角,偏航角, [ − π , π ] [-\pi, \pi] [−π,π]score, 目标对象的评分,用来计算ROC曲线或MAP。
相机坐标系中的点可以通过calib中的变换矩阵变换到图像像素坐标中。
rotation_y和alpha的区别在于,alpha度量的是相机中心到对象中心的角度。rotation_y度量的是对象绕相机坐标系y轴的转角yaw。以汽车为例,当一辆车在相机坐标系下位于x轴方向时,其rotation_y角为零,无论这辆车在x,z平面的哪个位置。而对于alpha角来说,仅当汽车在相机坐标系下z轴上时,alpha角为零,偏离z轴时,alpha角都不为零。
将激光点云投影到左目彩色图像中可以使用的公式为:X=P2*R0_rect*Tr_vel_to_cam*Y。
R0_rect是3x3的校正矩阵,Tr_vel_to_cam是3x4的雷达变换到相机坐标系下的变换矩阵。
代码实战
使用open3d读取点云
import numpy as np
import struct
import open3d as o3ddef convert_kitti_bin_to_pcd(binFilePath):size_float = 4list_pcd = []with open(binFilePath, "rb") as f:byte = f.read(size_float * 4)print(byte)while byte:x, y, z, intensity = struct.unpack("ffff", byte)list_pcd.append([x, y, z])byte = f.read(size_float * 4)np_pcd = np.asarray(list_pcd)pcd = o3d.geometry.PointCloud()pcd.points = o3d.utility.Vector3dVector(np_pcd)return pcdbs = "/xx/xx/data/code/mmdetection3d/demo/data/kitti/000008.bin"
pcds = convert_kitti_bin_to_pcd(bs)
o3d.visualization.draw_geometries([pcds])# save
o3d.io.write_point_cloud('000008.pcd', pcds, write_ascii=False, compressed=False, print_progress=False)
通过numpy读取,
def load_bin(bin_file):data = np.fromfile(bin_file, np.float32).reshape((-1, 4))data = data[:, :-1]pcd = o3d.geometry.PointCloud()pcd.points = o3d.utility.Vector3dVector(data)return pcd
上面的代码可以读取并可视化点云数据,且保存成pcd格式的点云。
选取的3D目标检测任务数据集training/image_02/000008.png,
对应的标签文件000008.txt,
Car 0.88 3 -0.69 0.00 192.37 402.31 374.00 1.60 1.57 3.23 -2.70 1.74 3.68 -1.29
Car 0.00 1 2.04 334.85 178.94 624.50 372.04 1.57 1.50 3.68 -1.17 1.65 7.86 1.90
Car 0.34 3 -1.84 937.29 197.39 1241.00 374.00 1.39 1.44 3.08 3.81 1.64 6.15 -1.31
Car 0.00 1 -1.33 597.59 176.18 720.90 261.14 1.47 1.60 3.66 1.07 1.55 14.44 -1.25
Car 0.00 0 1.74 741.18 168.83 792.25 208.43 1.70 1.63 4.08 7.24 1.55 33.20 1.95
Car 0.00 0 -1.65 884.52 178.31 956.41 240.18 1.59 1.59 2.47 8.48 1.75 19.96 -1.25
将其画在000008.png上为,
import cv2
img = cv2.imread(img_s)
with open(label_s) as f:lines = f.read().split("\n")[:-1]
for item in lines:boxes = item.split()[4:8]boxes = [float(x) for x in boxes]bb = np.array(boxes, dtype=np.int32)cv2.rectangle(img, bb[:2], bb[-2:], (0,0,255), 1)
cv2.imwrite("/xx/xx/data/code/mmdetection3d/demo/data/kitti/08_res.png", img)

看左下角两个检测框,边缘部分标注的并不好。
对应的点云数据为:
KITTI3D目标检测的数据标签给出的3D中心点的坐标是在左目彩色相机坐标系中。
使用Open3D可视化检测框的代码可以参考,
"""
from https://github.com/dtczhl/dtc-KITTI-For-
Beginners.git
"""
import matplotlib.pyplot as plt
import matplotlib.image as mping
import numpy as np
import os
import open3d as o3d
import open3d.visualization as o3d_vis
from shapely.geometry import Point
from shapely.geometry.polygon import PolygonMARKER_COLOR = {'Car': [1, 0, 0], # red'DontCare': [0, 0, 0], # black'Pedestrian': [0, 0, 1], # blue'Van': [1, 1, 0], # yellow'Cyclist': [1, 0, 1], # magenta'Truck': [0, 1, 1], # cyan'Misc': [0.5, 0, 0], # maroon'Tram': [0, 0.5, 0], # green'Person_sitting': [0, 0, 0.5]} # navy# image border width
BOX_BORDER_WIDTH = 5# point size
POINT_SIZE = 0.005def show_object_in_image(img_filename, label_filename):img = mping.imread(img_filename)with open(label_filename) as f_label:lines = f_label.readlines()for line in lines:line = line.strip('\n').split()left_pixel, top_pixel, right_pixel, bottom_pixel = [int(float(line[i])) for i in range(4, 8)]box_border_color = MARKER_COLOR[line[0]]for i in range(BOX_BORDER_WIDTH):img[top_pixel+i, left_pixel:right_pixel, :] = box_border_colorimg[bottom_pixel-i, left_pixel:right_pixel, :] = box_border_colorimg[top_pixel:bottom_pixel, left_pixel+i, :] = box_border_colorimg[top_pixel:bottom_pixel, right_pixel-i, :] = box_border_colorplt.imshow(img)plt.show()def show_object_in_point_cloud(point_cloud_filename, label_filename, calib_filename):pc_data = np.fromfile(point_cloud_filename, '<f4') # little-endian float32pc_data = np.reshape(pc_data, (-1, 4))cloud = o3d.geometry.PointCloud()cloud.points = o3d.utility.Vector3dVector(pc_data[:,:-1])pc_color = np.ones((len(pc_data), 3))calib = load_kitti_calib(calib_filename)rot_axis = 2with open(label_filename) as f_label:lines = f_label.readlines()bboxes_3d = []for line in lines:line = line.strip('\n').split()point_color = MARKER_COLOR[line[0]]veloc, dims, rz, box3d_corner = camera_coordinate_to_point_cloud(line[8:15], calib['Tr_velo_to_cam'])bboxes_3d.append(np.concatenate((veloc, dims, np.array([rz]))))bboxes_3d = np.array(bboxes_3d)print(bboxes_3d.shape)lines = []for i in range(len(bboxes_3d)):center = bboxes_3d[i, 0:3]dim = bboxes_3d[i, 3:6]yaw = np.zeros(3)yaw[rot_axis] = bboxes_3d[i, 6]rot_mat = o3d.geometry.get_rotation_matrix_from_xyz(yaw)# bottom center to gravity centercenter[rot_axis] += dim[rot_axis] / 2box3d = o3d.geometry.OrientedBoundingBox(center, rot_mat, dim)line_set = o3d.geometry.LineSet.create_from_oriented_bounding_box(box3d)line_set.paint_uniform_color(np.array(point_color) / 255.)lines.append(line_set)for i, v in enumerate(pc_data):if point_in_cube(v[:3], box3d_corner) is True:pc_color[i, :] = point_colorcloud.colors = o3d.utility.Vector3dVector(pc_color)o3d_vis.draw([*lines, cloud])def point_in_cube(point, cube):z_min = np.amin(cube[:, 2], 0)z_max = np.amax(cube[:, 2], 0)if point[2] > z_max or point[2] < z_min:return Falsepoint = Point(point[:2])polygon = Polygon(cube[:4, :2])return polygon.contains(point)def load_kitti_calib(calib_file):"""This script is copied from https://github.com/AI-liu/Complex-YOLO"""with open(calib_file) as f_calib:lines = f_calib.readlines()P0 = np.array(lines[0].strip('\n').split()[1:], dtype=np.float32)P1 = np.array(lines[1].strip('\n').split()[1:], dtype=np.float32)P2 = np.array(lines[2].strip('\n').split()[1:], dtype=np.float32)P3 = np.array(lines[3].strip('\n').split()[1:], dtype=np.float32)R0_rect = np.array(lines[4].strip('\n').split()[1:], dtype=np.float32)Tr_velo_to_cam = np.array(lines[5].strip('\n').split()[1:], dtype=np.float32)Tr_imu_to_velo = np.array(lines[6].strip('\n').split()[1:], dtype=np.float32)return {'P0': P0, 'P1': P1, 'P2': P2, 'P3': P3, 'R0_rect': R0_rect,'Tr_velo_to_cam': Tr_velo_to_cam.reshape(3, 4),'Tr_imu_to_velo': Tr_imu_to_velo}def camera_coordinate_to_point_cloud(box3d, Tr):"""This script is copied from https://github.com/AI-liu/Complex-YOLO"""def project_cam2velo(cam, Tr):T = np.zeros([4, 4], dtype=np.float32)T[:3, :] = TrT[3, 3] = 1T_inv = np.linalg.inv(T)lidar_loc_ = np.dot(T_inv, cam)lidar_loc = lidar_loc_[:3]return lidar_loc.reshape(1, 3)def ry_to_rz(ry):angle = -ry - np.pi / 2if angle >= np.pi:angle -= np.piif angle < -np.pi:angle = 2 * np.pi + anglereturn angleh, w, l, tx, ty, tz, ry = [float(i) for i in box3d]cam = np.ones([4, 1])cam[0] = txcam[1] = tycam[2] = tzt_lidar = project_cam2velo(cam, Tr)Box = np.array([[-l / 2, -l / 2, l / 2, l / 2, -l / 2, -l / 2, l / 2, l / 2],[w / 2, -w / 2, -w / 2, w / 2, w / 2, -w / 2, -w / 2, w / 2],[0, 0, 0, 0, h, h, h, h]])rz = ry_to_rz(ry)rotMat = np.array([[np.cos(rz), -np.sin(rz), 0.0],[np.sin(rz), np.cos(rz), 0.0],[0.0, 0.0, 1.0]])velo_box = np.dot(rotMat, Box)cornerPosInVelo = velo_box + np.tile(t_lidar, (8, 1)).Tbox3d_corner = cornerPosInVelo.transpose()dims = np.array([l, w, h])# t_lidar: the x, y coordinator of the center of the object# box3d_corner: the 8 cornersprint(t_lidar.shape)return t_lidar.reshape(-1), dims, rz, box3d_corner.astype(np.float32)if __name__ == '__main__':# updatesROOT = "/media/lx/data/code/mmdetection3d/demo/data/kitti"IMG_DIR = f'{ROOT}/image_2'LABEL_DIR = f'{ROOT}/label_2'POINT_CLOUD_DIR = f'{ROOT}/velo'CALIB_DIR = f'{ROOT}/calib'# id for viewingfile_id = 8img_filename = os.path.join(IMG_DIR, '{0:06d}.png'.format(file_id))label_filename = os.path.join(LABEL_DIR, '{0:06d}.txt'.format(file_id))pc_filename = os.path.join(POINT_CLOUD_DIR, '{0:06d}.bin'.format(file_id))calib_filename = os.path.join(CALIB_DIR, '{0:06d}.txt'.format(file_id))# show object in imageshow_object_in_image(img_filename, label_filename)# show object in point cloudshow_object_in_point_cloud(pc_filename, label_filename, calib_filename)
可视化的结果为:
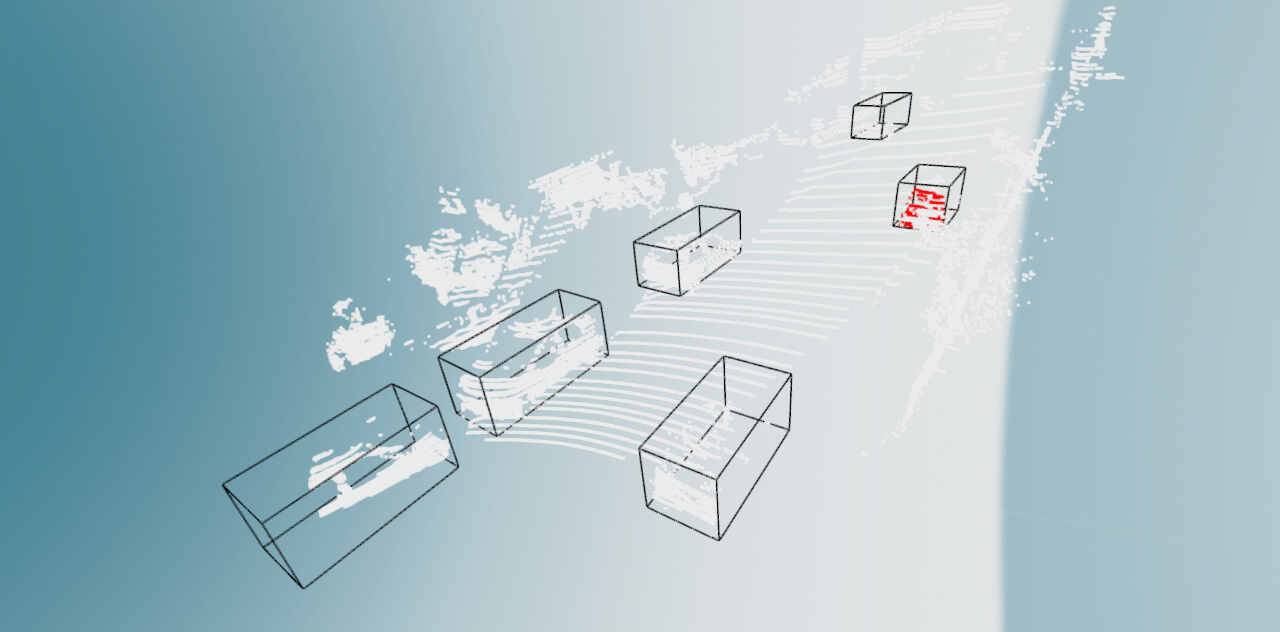
以上,就可以对KITTI数据集用于3D目标检测任务的情况有一个基本的认识了,后面用到多模态的时候再补充如何结合2D检测框一起来做目标的识别和定位。
- 1.https://www.cvlibs.net/datasets/kitti/eval_object.php?obj_benchmark=3d
- 2.https://github.com/dtczhl/dtc-KITTI-For-
Beginners.git
相关文章:
(一)KITTI数据集用于3D目标检测
KITTI数据集介绍 数据基本情况 KITTI是德国卡尔斯鲁厄科技学院和丰田芝加哥研究院开源的数据集,最早发布于2012年03月20号。 对应的论文Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite发表在CVPR2012上。 KITTI数据集搜集自德国卡尔斯鲁厄市&…...

手写Promise完整介绍
Promise是一种用于处理异步操作的机制,它可以将异步操作的结果以同步的方式进行处理和返回。在JavaScript中,Promise是一种内置对象,但我们也可以手动实现一个Promise类来更好地理解其原理和工作方式。 Promise的特性 首先,让我…...
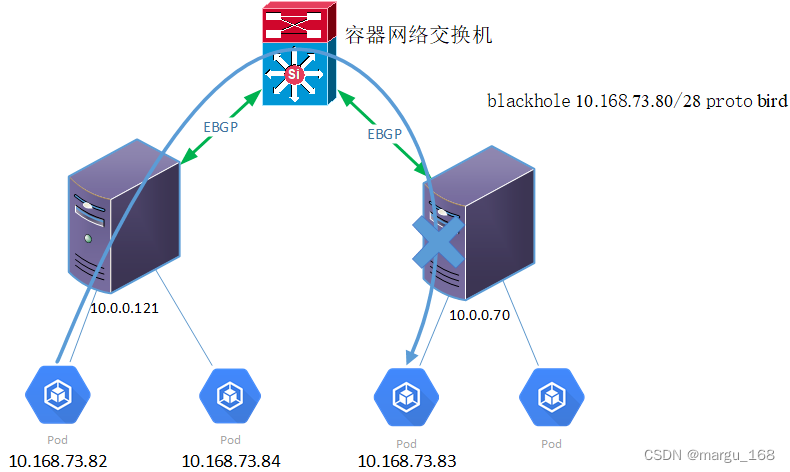
【kubernetes系列】Calico原理及配置
概述 Calico是针对容器,虚拟机和基于主机的本机工作负载的开源网络和网络安全解决方案。 Calico支持广泛的平台,包括Kubernetes,OpenShift,Docker EE,OpenStack和裸机服务。 Calico在每个计算节点都利用Linux Kernel实…...
RabbitMQ 的快速使用
docker部署rabbitmq # management才有管理页面 docker pull rabbitmq:management# 新建容器并运行 docker run \-e RABBITMQ_DEFAULT_USERadmin \ -e RABBITMQ_DEFAULT_PASSadmin \ -v mq-plugins:/plugins \--name mq \--hostname mq \-p 15672:15672 \-p 5672:5672 \-itd \ra…...

VUE3添加全局变量
全局变量的添加 在vue3.0中注入全局方法不是在prototype上挂载了,而是添加在config.globalProperties属性上。 //main.js import { createApp } from "vue"; import App from "./App.vue";const app createApp(App); app.config.globalPrope…...
JavaScript基础语法01——初识JavaScript
哈喽,大家好,我是雷工! 最近有项目用到KingFusion软件,由于KingFusion是B/S架构的客户端组态软件,因此在学习KingFusion产品时会涉及许多前端的知识。 像JavaScript语言就是需要用的,俗话说:活到…...
家宽用户家庭网的主要质量问题是什么?原因有哪些
1 引言 截至2020年底,我国家庭宽带(以下简称“家宽”)普及率已达到96%。经过一年多的发展,当前,家庭宽带的市场空间已经饱和。运营商在家宽市场的竞争也随之从新增用户数的竞争转移到家宽品质的竞争。 早期运营商的家…...
ZooKeeper的典型应用场景及实现
文章目录 1、典型应用场景及实现1.1、 数据发布/订阅1.1.1、配置管理案列 1.2、负载均衡1.3、命名服务1.4、分布式协调/通知1.4.1、一种通用的分布式系统机器间通信方式 1.5、集群管理1.6、Master选举1.7、分布式锁1.7.1、排他锁1.7.2、共享锁 1.8、分布式队列 2、ZooKeeper在大…...
智能安全帽~生命体征检测与危险气体检测一体化集成设计还是蓝牙无线外挂式方式好?
生命体征(心率、血氧等)检测&上报平台,危险气体采集&上报平台,是智能安全帽产品中常见的两种选配件,它们的实现有两种典型的模式: 1)将传感器集成到主板上,做成一体化的智能…...

【Java并发】聊聊对象内存布局和syn锁升级过程
对象存储解析:一个空Object对象到底占据多少内存? 对象内存布局 Mark Word占用8字节,类型指针占用8个字节,对象头占用16个字节。 好了,我们来看一下一个Object对占用多少空间, 因为java默认是开启压缩…...
【档案专题】八、电子档案鉴定与销毁
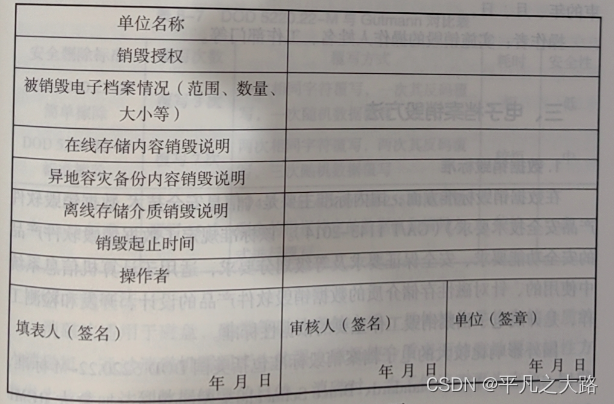
导读:主要针对电子档案鉴定与销毁相关内容介绍。对从事电子档案管理信息化的职业而言,不断夯实电子档案管理相关理论基础是十分重要。只有通过不断梳理相关知识体系和在实际工作当中应用实践,才能走出一条专业化加职业化的道路,从…...

进程与子进程
一、子进程 1.fork()创建子进程 一个现有的进程可以调用 fork()函数创建一个新的进程,调用 fork()函数的进程称为父进程,由 fork()函数创建出来的进程被称为子进程(child process)。(使用该函数需要包含头文件<uni…...

如何对MySQL和MariaDB中的查询和表进行优化-提升查询效率
前言 MySQL和MariaDB是数据库管理系统的流行选择。两者都使用SQL查询语言来输入和查询数据。 尽管SQL查询是简单易学的命令,但并不是所有的查询和数据库函数都具有相同的效率。随着你存储的信息量的增长,如果你的数据库支持一个网站,随着网…...

【Android】关于binder_calls_stats服务
Android 9上有了binder_calls_stats服务,提供了java层的binder统计, Android中的Binder Call Stats(Binder调用统计)是一项用于监控和记录Android系统中Binder通信的统计信息的功能。Binder是Android中的一种进程间通信ÿ…...

给前端返回http链接,由于浏览器缓存不能获取到最新资源怎么办?
1、问题描述 今天在工作中接到这样一个需求,接收前端的图片文件并上传到远程,将原有图片覆盖并返回一个http链接以供前端展示。用户使用后反馈没有修改成功,上了远程拉图片发现已经修改了,但是用户浏览器还是老的图片。排查原因是…...

【Java Web】检查用户登录状态,防止用户访问到非法页面
使用拦截器 在方法前标注自定义注解拦截所有请求,只处理带有该注解的方法 自定义注解: 常用元注解:Target, Rentention, Document, Inherited如何读取注解: - Method.getDeclaredAnnotations() - Method.getAnnotaion(Class<T&…...
数学建模——校园供水系统智能管理
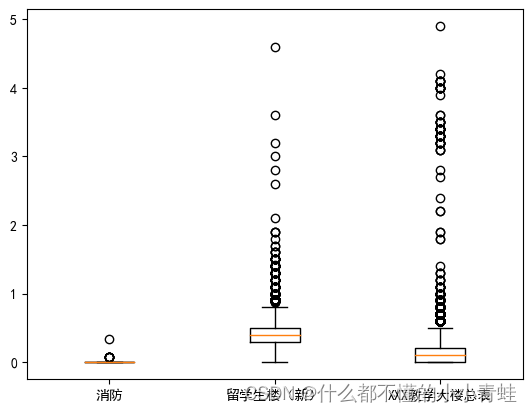
import pandas as pd data1pd.read_excel("C://Users//JJH//Desktop//E//附件_一季度.xlsx") data2pd.read_excel("C://Users//JJH//Desktop//E//附件_二季度.xlsx") data3pd.read_excel("C://Users//JJH//Desktop//E//附件_三季度.xlsx") data4…...
分布式集群——搭建Hadoop环境以及相关的Hadoop介绍
系列文章目录 分布式集群——jdk配置与zookeeper环境搭建 分布式集群——搭建Hadoop环境以及相关的Hadoop介绍 文章目录 前言 一 hadoop的相关概念 1.1 Hadoop概念 补充:块的存储 1.2 HDFS是什么 1.3 三种节点的功能 I、NameNode节点 II、fsimage与edits…...

Python的os.walk()函数使用案例
在Python中,os模块是一个非常实用的工具,它可以让我们与操作系统进行交互,操作文件和目录。在本文中,我们将详细介绍os模块中的遍历文件功能,并通过具体案例和使用场景来解释。 首先,导入os模块。在Pytho…...
学习JAVA打卡第四十五天
StringBuffer类 StringBuffer对象 String对象的字符序列是不可修改的,也就是说,String对象的字符序列的字符不能被修改、删除,即String对象的实体是不可以再发生变化,例如:对于 StringBuffer有三个构造方法ÿ…...

KubeSphere 容器平台高可用:环境搭建与可视化操作指南
Linux_k8s篇 欢迎来到Linux的世界,看笔记好好学多敲多打,每个人都是大神! 题目:KubeSphere 容器平台高可用:环境搭建与可视化操作指南 版本号: 1.0,0 作者: 老王要学习 日期: 2025.06.05 适用环境: Ubuntu22 文档说…...
超短脉冲激光自聚焦效应
前言与目录 强激光引起自聚焦效应机理 超短脉冲激光在脆性材料内部加工时引起的自聚焦效应,这是一种非线性光学现象,主要涉及光学克尔效应和材料的非线性光学特性。 自聚焦效应可以产生局部的强光场,对材料产生非线性响应,可能…...
Flask RESTful 示例
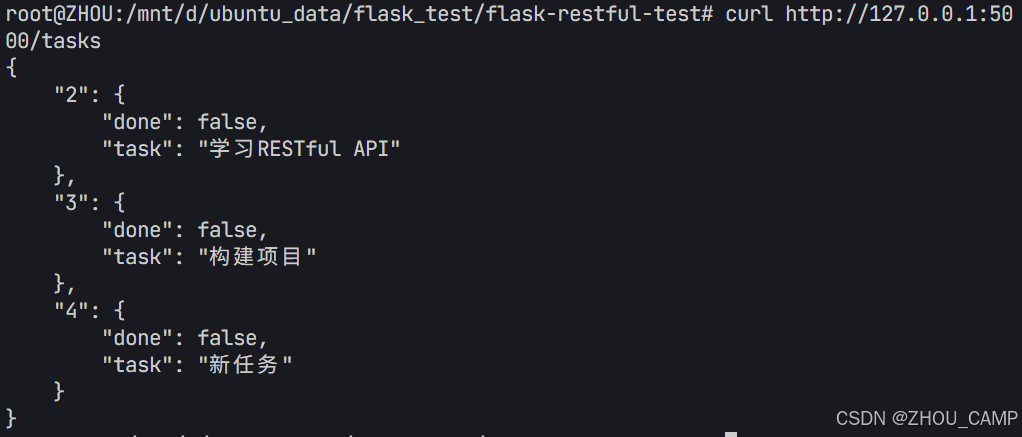
目录 1. 环境准备2. 安装依赖3. 修改main.py4. 运行应用5. API使用示例获取所有任务获取单个任务创建新任务更新任务删除任务 中文乱码问题: 下面创建一个简单的Flask RESTful API示例。首先,我们需要创建环境,安装必要的依赖,然后…...

工业安全零事故的智能守护者:一体化AI智能安防平台
前言: 通过AI视觉技术,为船厂提供全面的安全监控解决方案,涵盖交通违规检测、起重机轨道安全、非法入侵检测、盗窃防范、安全规范执行监控等多个方面,能够实现对应负责人反馈机制,并最终实现数据的统计报表。提升船厂…...

前端倒计时误差!
提示:记录工作中遇到的需求及解决办法 文章目录 前言一、误差从何而来?二、五大解决方案1. 动态校准法(基础版)2. Web Worker 计时3. 服务器时间同步4. Performance API 高精度计时5. 页面可见性API优化三、生产环境最佳实践四、终极解决方案架构前言 前几天听说公司某个项…...
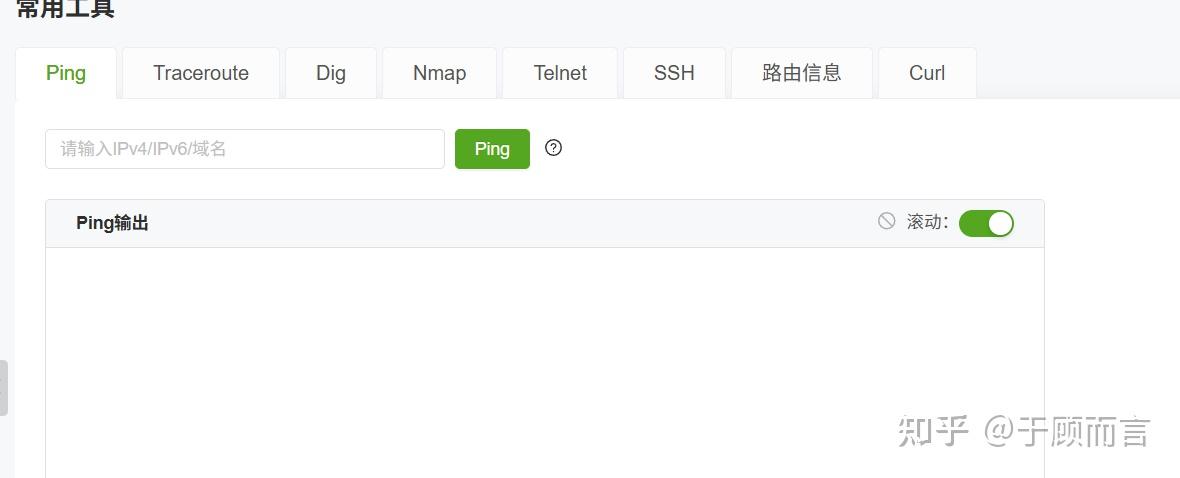
【网络安全产品大调研系列】2. 体验漏洞扫描
前言 2023 年漏洞扫描服务市场规模预计为 3.06(十亿美元)。漏洞扫描服务市场行业预计将从 2024 年的 3.48(十亿美元)增长到 2032 年的 9.54(十亿美元)。预测期内漏洞扫描服务市场 CAGR(增长率&…...
【JVM】- 内存结构
引言 JVM:Java Virtual Machine 定义:Java虚拟机,Java二进制字节码的运行环境好处: 一次编写,到处运行自动内存管理,垃圾回收的功能数组下标越界检查(会抛异常,不会覆盖到其他代码…...

条件运算符
C中的三目运算符(也称条件运算符,英文:ternary operator)是一种简洁的条件选择语句,语法如下: 条件表达式 ? 表达式1 : 表达式2• 如果“条件表达式”为true,则整个表达式的结果为“表达式1”…...

解决本地部署 SmolVLM2 大语言模型运行 flash-attn 报错
出现的问题 安装 flash-attn 会一直卡在 build 那一步或者运行报错 解决办法 是因为你安装的 flash-attn 版本没有对应上,所以报错,到 https://github.com/Dao-AILab/flash-attention/releases 下载对应版本,cu、torch、cp 的版本一定要对…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个生活电费的缴纳和查询小程序
一、项目初始化与配置 1. 创建项目 ohpm init harmony/utility-payment-app 2. 配置权限 // module.json5 {"requestPermissions": [{"name": "ohos.permission.INTERNET"},{"name": "ohos.permission.GET_NETWORK_INFO"…...