自动驾驶——【规划】记忆泊车特殊学习路径拟合
1.Back ground
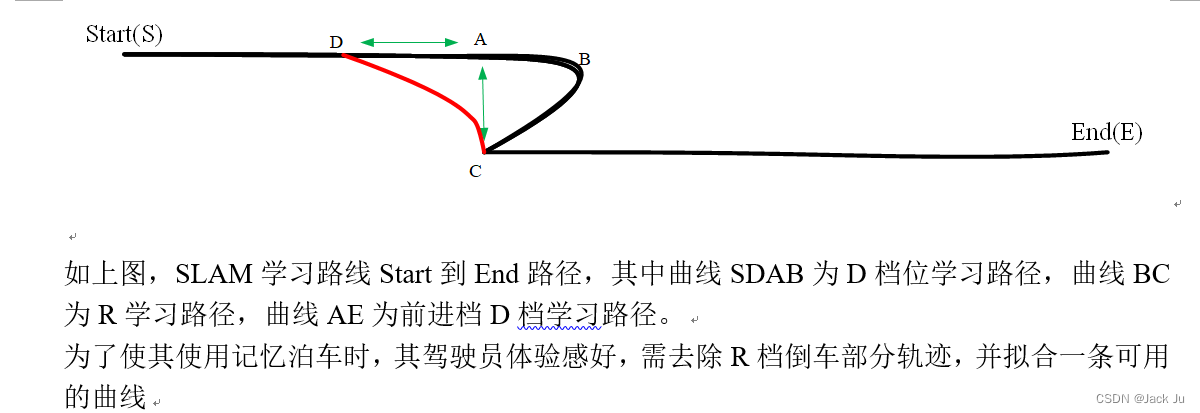
如上图,SLAM学习路线Start到End路径,其中曲线SDAB为D档位学习路径,曲线BC为R学习路径,曲线AE为前进档D档学习路径。
为了使其使用记忆泊车时,其驾驶员体验感好,需去除R档倒车部分轨迹,并拟合一条可用的曲线
2.Algorithm Introduction
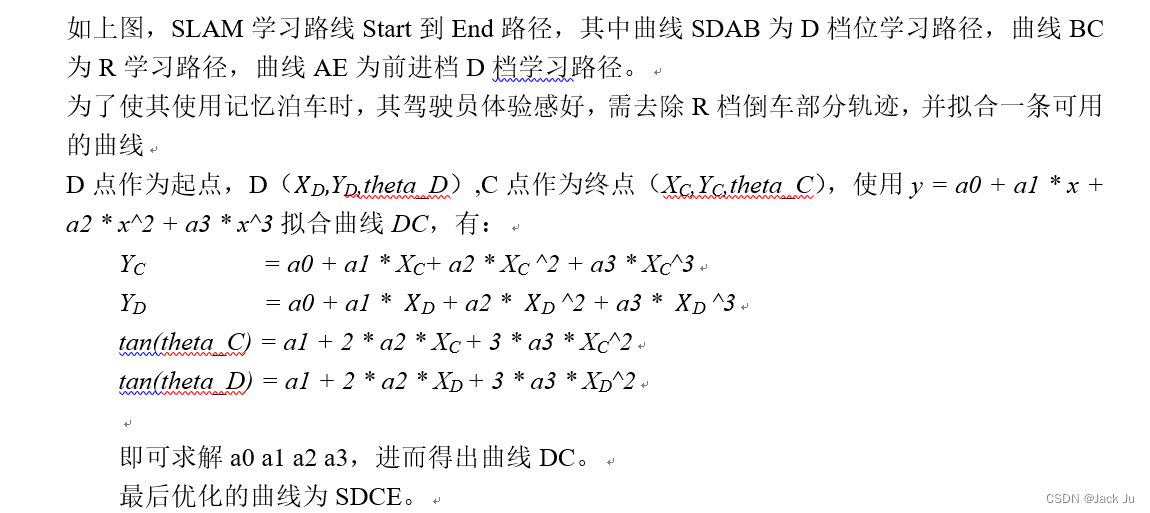
D点作为起点,D(XD,YD,theta_D),C点作为终点(XC,YC,theta_C),使用y = a0 + a1 * x + a2 * x^2 + a3 * x^3拟合曲线DC,有:
YC = a0 + a1 * XC+ a2 * XC ^2 + a3 * XC^3
YD = a0 + a1 * XD + a2 * XD ^2 + a3 * XD ^3
tan(theta_C) = a1 + 2 * a2 * XC + 3 * a3 * XC^2
tan(theta_D) = a1 + 2 * a2 * XD + 3 * a3 * XD^2
即可求解a0 a1 a2 a3,进而得出曲线DC。
最后优化的曲线为SDCE。
3.Coding using MATLAB
%Function:记忆泊车学习路径拟合
%Create by:Juchunyu
%Date:2023-09-01 17:00:42%设计轨迹x,y
% y = 2 (10>=x>=0)
% y = -1.2/50 *x^2 - 4.4/10 *x (10>=x>=5)
% y = 1.6 (20>=x>=5)
slam_x = [];
slam_y = [];
slam_theta = [];
GearInfo = [];%D:4 R:2
D = 4;
R = 2;
%Generate trajpoint
for i = 0 : 0.2 :10slam_x = [slam_x i];slam_y = [slam_y 2];GearInfo = [GearInfo D];slam_theta = [slam_theta 0];
end
for i =10:-0.2:5slam_x = [slam_x i];y_temp = -1.2*i*i/50 + 4.4 * i/10;slam_y = [slam_y y_temp];GearInfo = [GearInfo R];slam_theta_temp = -2.4*i/50 - 4.4/10;slam_theta = [slam_theta slam_theta_temp];
endfor i = 5:0.2:20slam_x = [slam_x i];slam_y = [slam_y 1.6];GearInfo = [GearInfo D];slam_theta = [slam_theta 0];
endfigure(1)
plot(slam_x,slam_y);
title('SLAM学习曲线')
hold on
%%处理算法%检测倒车 只检测一次倒车
Index_start = 0;
Index_end = 0;
Index_startArr = [];
Index_endArr = [];[m_ size_] = size(slam_x);while i < size_Index_start = 0;Index_end = 0;finish_Flag = 0;if(GearInfo(1,i) == R)Index_start = i;j = Index_start;while j < size_if GearInfo(1,j) == DIndex_end = j;finish_Flag = 1;break;endj = j + 1; endif(finish_Flag == 1)Index_startArr = [Index_startArr Index_start];Index_endArr = [Index_endArr Index_end];endi = j;endi = i + 1;
endPointCIndx = Index_endArr(1,1);
PointBIndx = Index_startArr(1,1);
PointAIndx = 0;
%处理算法
% find near Point
min_ = 1000000;
for i = 1:1:Index_startArr(1,1)dist = ((slam_x(1,PointCIndx) - slam_x(1,i))^2 + (slam_y(1,PointCIndx) - slam_y(1,i))^2)^(0.5);if(dist < min_)min_ = dist;PointAIndx = i;end
end%计算DAdistDA = ((slam_x(1,PointAIndx) - slam_x(1,1))^2 + (slam_y(1,PointAIndx) - slam_y(1,1))^2)^(0.5);%往前推算1m
PointDIndx = PointAIndx;
if(distDA > 1.0)for i = PointAIndx:-1:1dist_ = ((slam_x(1,PointAIndx) - slam_x(1,i))^2 + (slam_y(1,PointAIndx) - slam_y(1,i))^2)^(0.5);if(dist_ > 1.0)PointDIndx = i;break; endend
end%处理D点到C点曲线平滑
PointDx = slam_x(1,PointDIndx);
PointDy = slam_y(1,PointDIndx);PointCx = slam_x(1,PointCIndx);
PointCy = slam_y(1,PointCIndx);
%A*X = BA(1,1) = 1;
A(1,2) = PointCx;
A(1,3) = PointCx * PointCx;
A(1,4) = PointCx * PointCx * PointCx;A(2,1) = 1;
A(2,2) = PointDx;
A(2,3) = PointDx * PointDx;
A(2,4) = PointDx * PointDx * PointDx;A(3,1) = 0;
A(3,2) = 1;
A(3,3) = 2 * PointCx;
A(3,4) = 3 * PointCx * PointCx;A(4,1) = 0;
A(4,2) = 1;
A(4,3) = 2 * PointDx;
A(4,4) = 3 * PointDx * PointDx;B(1,1) = PointCy;
B(2,1) = PointDy;
B(3,1) = tan(slam_theta(1,PointCIndx));
B(4,1) = tan(slam_theta(1,PointDIndx));X = A^-1 * B;%%拟合曲线系数
a0 = X(1,1);
a1 = X(2,1);
a2 = X(3,1);
a3 = X(4,1);%重组轨迹曲线
slam_Xfinal = [];
slam_Yfinal = [];
slam_thetaFinal = [];
for i = 1:1:PointDIndxslam_Xfinal = [slam_Xfinal slam_x(1,i)];slam_Yfinal = [slam_Yfinal slam_y(1,i)];slam_thetaFinal = [slam_thetaFinal slam_theta(1,i)];
end%拟合曲线DC
for x = PointDx:0.2:PointCxslam_Xfinal = [slam_Xfinal x];y_temp = a0 + a1 * x + a2 * x^2 + a3 * x^3;theta_temp = a1 + 2 * a2 * x + 3 * a3 *x^2;slam_Yfinal = [slam_Yfinal y_temp];slam_thetaFinal = [slam_thetaFinal theta_temp];
end%组合后部分曲线
for i = PointCIndx:1:size_slam_Xfinal = [slam_Xfinal slam_x(1,i)];slam_Yfinal = [slam_Yfinal slam_y(1,i)];slam_thetaFinal = [slam_thetaFinal slam_theta(1,i)];
endhold on figure(2)
plot(slam_Xfinal,slam_Yfinal,'r');
title('处理后的SLAM学习曲线')

4.Exist Problems
但是存在问题,
(1) AC距离很小的时候的处理
(2) 学习路线中多次倒车的处理
(3) DC在X轴方向投影距离很小时的处理。
2030901
鞠春宇
相关文章:
自动驾驶——【规划】记忆泊车特殊学习路径拟合
1.Back ground 如上图,SLAM学习路线Start到End路径,其中曲线SDAB为D档位学习路径,曲线BC为R学习路径,曲线AE为前进档D档学习路径。 为了使其使用记忆泊车时,其驾驶员体验感好,需去除R档倒车部分轨迹&#x…...
)
【跟小嘉学 Rust 编程】十六、无畏并发(Fearless Concurrency)
系列文章目录 【跟小嘉学 Rust 编程】一、Rust 编程基础 【跟小嘉学 Rust 编程】二、Rust 包管理工具使用 【跟小嘉学 Rust 编程】三、Rust 的基本程序概念 【跟小嘉学 Rust 编程】四、理解 Rust 的所有权概念 【跟小嘉学 Rust 编程】五、使用结构体关联结构化数据 【跟小嘉学…...
)
Android 进阶——图形显示系统之VSync和 Choreographer的创建详解(一)
引言 前一篇文章Android 进阶——图形显示系统之底层图像显示原理小结(一)介绍了关于Android 图形显示系统的基础理论,相信你对于Android的图形显示系统中图形界面渲染刷新机制有了更深的了解,接下来进一步讲解VSync和Choreography的联系和作用。 一、VSync 信号的产生概…...
SQL Server开启变更数据捕获(CDC)
一、CDC简介 变更数据捕获(Change Data Capture ,简称 CDC):记录 SQL Server 表的插入、更新和删除操作。开启cdc的源表在插入、更新和删除操作时会插入数据到日志表中。cdc通过捕获进程将变更数据捕获到变更表中,通过…...

八、性能测试
八、性能测试 8.1 性能测试代码 #include"ConcurrentAlloc.h"// ntimes 一轮申请和释放内存的次数 // rounds 轮次 void BenchmarkMalloc(size_t ntimes, size_t nworks, size_t rounds) {std::vector<std::thread> vthread(nworks);std::atomic<size_t&g…...

景芯SoC 芯片全流程培训
【全网唯一】景芯SoC是一款用于芯片全流程培训的低功耗ISP图像处理SoC,采用低功耗RISC-V处理器,内置ITCM SRAM、DTCM SRAM,集成包括MIPI、ISP、CNN、QSPI、UART、I2C、GPIO、百兆以太网等IP,采用SMIC40工艺设计流片。 培训数据包括…...
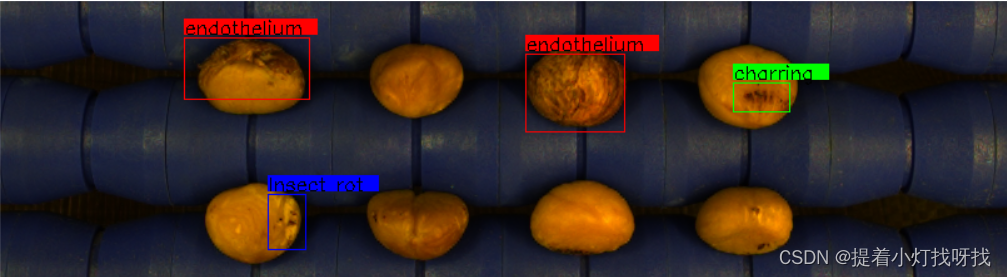
目标检测后的图像上绘制边界框和标签
效果如图所示,有个遗憾就是CV2在图像上显示中文有点难,也不想用别的了,所以改成了英文,代码在下面了,一定要注意一点,就是标注文件的读取一定要根据自己的实际情况改一下,我的所有图像的标注文件…...

Leetcode: 1. 两数之和 【题解超详细】
前言 有人夜里挑灯看花,有人相爱,有人夜里开车看海,有人leetcode第一题都做不出来。 希望下面的题解可以帮助你们开始 你们的 leetcode 刷题 的 天降之路 题目 给定一个整数数组 nums 和一个整数目标值 target,请你在该数组中…...

PHP 通过 Redis 解决并发请求的操作问题
比如PHP收到两个并发的请求A和B,要求只能其中一个请求处理S1操作,另一个请求直接返回失败,可以通过redis去解决: SETNX(SET if Not eXists)是 Redis 中的一个原子命令,用于设置键-值对…...
浅谈信息论和信息编码
目录 背景 信息是什么 信息度量 小白鼠实验 哈夫曼编码 密码学 其它应用 背景 克劳德艾尔伍德香农(Claude Elwood Shannon)出生于 1916 年 美国密歇根州。1936 年毕业于密歇根大学,获得数学和电子工程学士学位。之后,他在麻…...

【测试】笔试02
文章目录 1. 下面不属于软件测试步骤的是2. 关于测试驱动开发,描述错误的是3. 在软件测试中,圈复杂度(Cyclomatic complexity):代码逻辑复杂度的度量,提供了被测代码的路径数量。圈复杂度可通过系统控制流图…...

公司内部网段多管控乱,该如何规范跨网文件传输交换?
古往今来,高筑墙一直是有效的防御措施。从边塞长城到护城河外的高高城墙,都是利用隔离地域的形式实现保护安全域的效果。这样一来,城内的安全域可以在遇到危险时受到有效保护。 在企业网络安全防护方面,网络安全域隔离也是网络安全…...

Ceph入门到精通-OSD waring 设置建议
OSD 以下检查表明 OSD 节点存在问题。 警告 1 在 /var/lib/ceph/osd 中找到的多个ceph_fsid值。 这可能意味着您正在托管许多集群的 OSD 此节点或某些 OSD 配置错误以加入 您期望的集群。 2 设置可能会导致数据丢失,因为如果 未达到最小值,Ceph 将不会确…...

软件测试工程师如何快速理解业务?
1. 阅读需求文档和业务资料 仔细阅读与业务相关的文档和资料对于理解业务至关重要。 需求文档通常描述了软件的功能和用户需求,而业务规范则详细说明了业务流程、规则和标准。 仔细阅读这些文档,你可以了解业务的基本概念、要求和流程。 同时&#x…...

【教程】部署apprtc服务中安装google-cloud-cli组件的问题及解决
#0# 前置条件 已经安装完成node,grunt,node 组件和python pip包等。需要安装google-cloud-cli组件。 Ubuntu安装google-cloud-cli组件 apprtc项目运行需要google-cloud-cli前置组件,且运行其中的dev_appserver.py。 根据google官方的关于安…...

C++——shared_ptr:make_shared的用处,与shared_ptr直接构造的区别
shared_ptr shared_ptr继承自__shared_ptr,其中有两个对象,一个是指向资源的指针,一个是控制块,指向一个引用计数对象。控制块中存储了强引用和弱引用的计数,强引用Uses代表shared_ptr对象的引用计数,弱引…...
【网络安全带你练爬虫-100练】第17练:分割字符串
目录 一、目标1:使用函数分割 二、目标2:使用函数模块 三、目标3:使用正则匹配 一、目标1:使用函数分割 目标:x.x.x.x[中国北京 xx云] 方法:split函数replace函数 1、分割:使用split()方法将…...

Unity 之ToolTip的用法
文章目录 在Unity中,ToolTip是一个在编辑器中使用的UI元素,它提供了鼠标悬停在某个对象或控件上时显示的文本信息。ToolTip通常用于向开发人员提供有关对象、字段、控件或菜单项的附加信息,从而帮助他们更好地理解和使用这些元素。 ToolTip通…...

xsschallenge通关(11-15)
level 11 老规矩,先查看源码,做代码审计: <?php ini_set("display_errors", 0); $str $_GET["keyword"]; $str00 $_GET["t_sort"]; $str11$_SERVER[HTTP_REFERER]; $str22str_replace(">&quo…...

Kubernetes技术--k8s核心技术集群的安全机制RBAC
1.引入 我们在访问k8s的集群的时候,需要经过一下几个步骤: -a:认证 -1).传输安全:对外是不暴露端口:8080,只能够在内部访问,对外使用的是6443端口。 -2).客户端认证的常用几种方式: -https证书 基于ca证书 -https token认证 通过token识别用户 -https <...

OpenLayers 可视化之热力图
注:当前使用的是 ol 5.3.0 版本,天地图使用的key请到天地图官网申请,并替换为自己的key 热力图(Heatmap)又叫热点图,是一种通过特殊高亮显示事物密度分布、变化趋势的数据可视化技术。采用颜色的深浅来显示…...

Go 语言接口详解
Go 语言接口详解 核心概念 接口定义 在 Go 语言中,接口是一种抽象类型,它定义了一组方法的集合: // 定义接口 type Shape interface {Area() float64Perimeter() float64 } 接口实现 Go 接口的实现是隐式的: // 矩形结构体…...
SpringCloudGateway 自定义局部过滤器
场景: 将所有请求转化为同一路径请求(方便穿网配置)在请求头内标识原来路径,然后在将请求分发给不同服务 AllToOneGatewayFilterFactory import lombok.Getter; import lombok.Setter; import lombok.extern.slf4j.Slf4j; impor…...
使用 SymPy 进行向量和矩阵的高级操作
在科学计算和工程领域,向量和矩阵操作是解决问题的核心技能之一。Python 的 SymPy 库提供了强大的符号计算功能,能够高效地处理向量和矩阵的各种操作。本文将深入探讨如何使用 SymPy 进行向量和矩阵的创建、合并以及维度拓展等操作,并通过具体…...
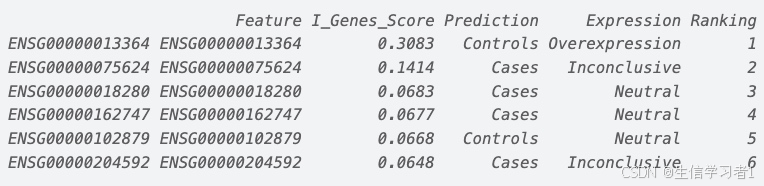
【数据分析】R版IntelliGenes用于生物标志物发现的可解释机器学习
禁止商业或二改转载,仅供自学使用,侵权必究,如需截取部分内容请后台联系作者! 文章目录 介绍流程步骤1. 输入数据2. 特征选择3. 模型训练4. I-Genes 评分计算5. 输出结果 IntelliGenesR 安装包1. 特征选择2. 模型训练和评估3. I-Genes 评分计…...

CRMEB 中 PHP 短信扩展开发:涵盖一号通、阿里云、腾讯云、创蓝
目前已有一号通短信、阿里云短信、腾讯云短信扩展 扩展入口文件 文件目录 crmeb\services\sms\Sms.php 默认驱动类型为:一号通 namespace crmeb\services\sms;use crmeb\basic\BaseManager; use crmeb\services\AccessTokenServeService; use crmeb\services\sms\…...
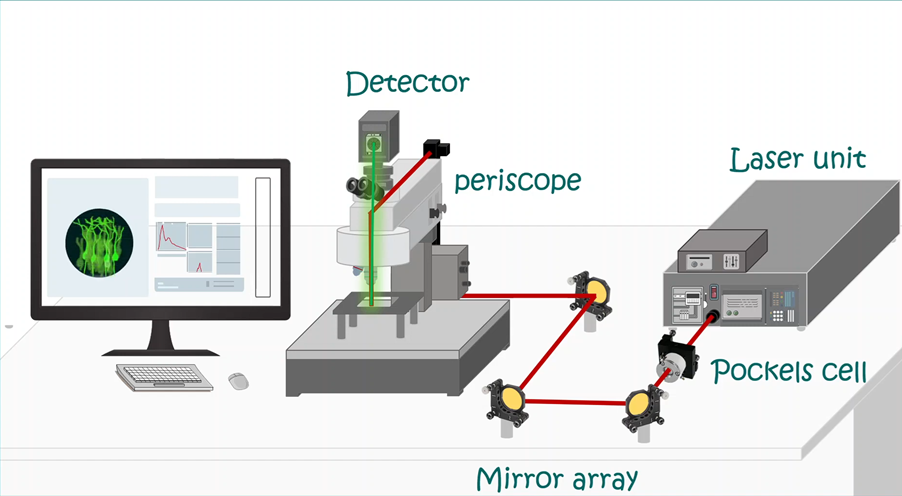
LabVIEW双光子成像系统技术
双光子成像技术的核心特性 双光子成像通过双低能量光子协同激发机制,展现出显著的技术优势: 深层组织穿透能力:适用于活体组织深度成像 高分辨率观测性能:满足微观结构的精细研究需求 低光毒性特点:减少对样本的损伤…...
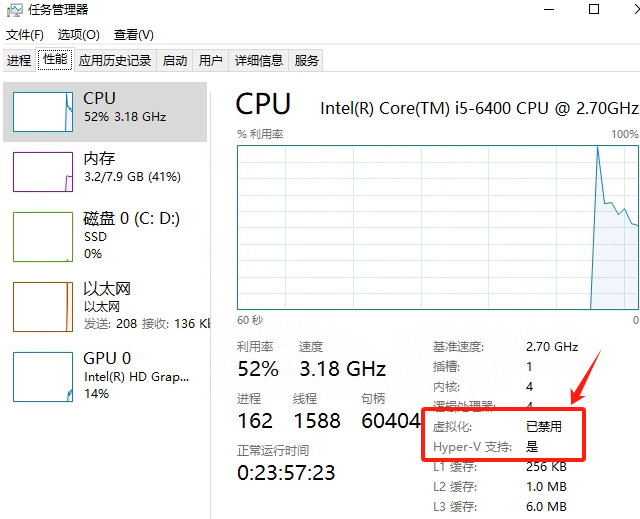
Windows电脑能装鸿蒙吗_Windows电脑体验鸿蒙电脑操作系统教程
鸿蒙电脑版操作系统来了,很多小伙伴想体验鸿蒙电脑版操作系统,可惜,鸿蒙系统并不支持你正在使用的传统的电脑来安装。不过可以通过可以使用华为官方提供的虚拟机,来体验大家心心念念的鸿蒙系统啦!注意:虚拟…...
aardio 自动识别验证码输入
技术尝试 上周在发学习日志时有网友提议“在网页上识别验证码”,于是尝试整合图像识别与网页自动化技术,完成了这套模拟登录流程。核心思路是:截图验证码→OCR识别→自动填充表单→提交并验证结果。 代码在这里 import soImage; import we…...

链式法则中 复合函数的推导路径 多变量“信息传递路径”
非常好,我们将之前关于偏导数链式法则中不能“约掉”偏导符号的问题,统一使用 二重复合函数: z f ( u ( x , y ) , v ( x , y ) ) \boxed{z f(u(x,y),\ v(x,y))} zf(u(x,y), v(x,y)) 来全面说明。我们会展示其全微分形式(偏导…...