疑难杂症篇(二十一)--Ubuntu18.04安装usb-cam过程出现的问题
对Ubuntu18.04{\rm Ubuntu 18.04}Ubuntu18.04环境下的ROS{\rm ROS}ROS的melodic{\rm melodic}melodic版本安装usb−cam{\rm usb-cam}usb−cam过程出现的两个常见问题提出解决方案。
1.问题1:usb-cam功能包编译时出现"未定义的引用"的问题
问题描述:把usb−cam{\rm usb-cam}usb−cam功能包下载到工作空间进行编译时,出现很多的"未定义的引用"的错误,具体问题见下图所示:

2.解决方案
查看usb−cam{\rm usb-cam}usb−cam功能包下的CMakeLists.txt{\rm CMakeLists.txt}CMakeLists.txt文件,其中CMakeLists.txt{\rm CMakeLists.txt}CMakeLists.txt文件具体内容如下代码块所示:
cmake_minimum_required(VERSION 2.8.12)
project(usb_cam)## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS cv_bridge image_transport roscpp std_msgs std_srvs sensor_msgs camera_info_manager)# Find OpenCV
find_package(OpenCV REQUIRED)## pkg-config libraries
find_package(PkgConfig REQUIRED)
pkg_check_modules(avcodec libavcodec REQUIRED)
pkg_check_modules(avutil libavutil REQUIRED)
pkg_check_modules(swscale libswscale REQUIRED)###################################################
## Declare things to be passed to other projects ##
##################################################### LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(INCLUDE_DIRS includeLIBRARIES ${PROJECT_NAME}
)###########
## Build ##
###########include_directories(include${catkin_INCLUDE_DIRS}${avcodec_INCLUDE_DIRS}${swscale_INCLUDE_DIRS}${avutil_INCLUDE_DIRS}${OpenCV_INCLUDE_DIRS}
)## Build the USB camera library
add_library(${PROJECT_NAME} src/usb_cam.cpp)
target_link_libraries(${PROJECT_NAME}${avcodec_LINK_LIBRARIES}${avutil_LINK_LIBRARIES}${swscale_LINK_LIBRARIES}${catkin_LIBRARIES}${OpenCV_LIBS}
)## Declare a cpp executable
add_executable(${PROJECT_NAME}_node nodes/usb_cam_node.cpp)
target_link_libraries(${PROJECT_NAME}_node${PROJECT_NAME}${avcodec_LINK_LIBRARIES}${avutil_LINK_LIBRARIES}${swscale_LINK_LIBRARIES}${catkin_LIBRARIES}${OpenCV_LIBS}
)#############
## Install ##
############### Mark executables and/or libraries for installation
install(TARGETS ${PROJECT_NAME}_node ${PROJECT_NAME}RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
)## Copy launch files
install(DIRECTORY launch/DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/launchFILES_MATCHING PATTERN "*.launch"
)install(DIRECTORY include/${PROJECT_NAME}/DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}FILES_MATCHING PATTERN "*.h" PATTERN "*.hpp"
)
分析CMakeLists.txt{\rm CMakeLists.txt}CMakeLists.txt文件可知在编译内容上,所依赖的库:avcodec、swscale、avutil{\rm avcodec、swscale、avutil}avcodec、swscale、avutil,使用locate{\rm locate}locate命令找出路径:
###########
## Build ##
###########include_directories(include${catkin_INCLUDE_DIRS}${avcodec_INCLUDE_DIRS}${swscale_INCLUDE_DIRS}${avutil_INCLUDE_DIRS}${OpenCV_INCLUDE_DIRS}
)## Build the USB camera library
add_library(${PROJECT_NAME} src/usb_cam.cpp)
target_link_libraries(${PROJECT_NAME}${avcodec_LINK_LIBRARIES}${avutil_LINK_LIBRARIES}${swscale_LINK_LIBRARIES}${catkin_LIBRARIES}${OpenCV_LIBS}
)## Declare a cpp executable
add_executable(${PROJECT_NAME}_node nodes/usb_cam_node.cpp)
target_link_libraries(${PROJECT_NAME}_node${PROJECT_NAME}${avcodec_LINK_LIBRARIES}${avutil_LINK_LIBRARIES}${swscale_LINK_LIBRARIES}${catkin_LIBRARIES}${OpenCV_LIBS}
)
# 在终端下分别locate出三个库的具体路径
locate libavcodec
locate libavutil
locate libswscale
得出具体路径后,在CMakeLists.txt{\rm CMakeLists.txt}CMakeLists.txt文件写入路径,见下面代码块:
## Declare a cpp executable
add_executable(${PROJECT_NAME}_node nodes/usb_cam_node.cpp)# CMakeLists.txt文件新增路径部分
# ====================================================================
set(avcodec_LINK_LIBRARIES /usr/lib/x86_64-linux-gnu/libavcodec.so)
set(avutil_LINK_LIBRARIES /usr/lib/x86_64-linux-gnu/libavutil.so)
set(swscale_LINK_LIBRARIES /usr/lib/x86_64-linux-gnu/libswscale.so)
# ====================================================================target_link_libraries(${PROJECT_NAME}_node${PROJECT_NAME}${avcodec_LINK_LIBRARIES}${avutil_LINK_LIBRARIES}${swscale_LINK_LIBRARIES}${catkin_LIBRARIES}${OpenCV_LIBS}
)
修改CMakeLists.txt{\rm CMakeLists.txt}CMakeLists.txt文件后,返回工作空间进行编译,如下图所示:

3.问题2:usb-cam安装好后出现"找不到video0"的问题
问题描述:解决问题1后,成功进行编译,但在打开摄像头的时候出现找不到Video0{\rm Video0}Video0的问题,具体如下图所示:

4.解决方案
# 1.关闭虚拟机,进入编辑虚拟机设置;
# 2.在"USB控制器选项"的"显示所有USB设备"前打上√;
# 3.启动虚拟机;
# 4.在虚拟机选项-->可移动设备-->USB 2.0 HD UVC Web Cam-->点击"连接";
# 5.查看是否显示video0;
cd /dev/
ls


相关文章:
疑难杂症篇(二十一)--Ubuntu18.04安装usb-cam过程出现的问题
对Ubuntu18.04{\rm Ubuntu 18.04}Ubuntu18.04环境下的ROS{\rm ROS}ROS的melodic{\rm melodic}melodic版本安装usb−cam{\rm usb-cam}usb−cam过程出现的两个常见问题提出解决方案。 1.问题1:usb-cam功能包编译时出现"未定义的引用"的问题 问题描述&#…...

npm-npm i XX --save 和--save-dev
之前使用npm i XX --save 和--save-dev 没太在意,就想记录一下,查到一篇比较全的(链接:NPM install -save 和 -save-dev 傻傻分不清),直接看好了,哈哈~ # 安装模块到项目目录下 npm install moduleName # -g 的意思是…...
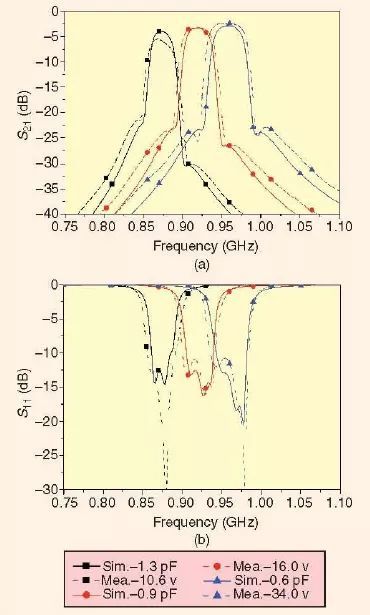
可重构或可调谐微波滤波器技术
电子可重构,或者说电调微波滤波器由于其在改善现在及未来微波系统容量中不断提高的重要性而正吸引着人们越来越多的关注来对其进行研究和开发。例如,崭露头脚的超宽带(UWB)技术要求使用很宽的无线电频谱。然而,作为资源…...
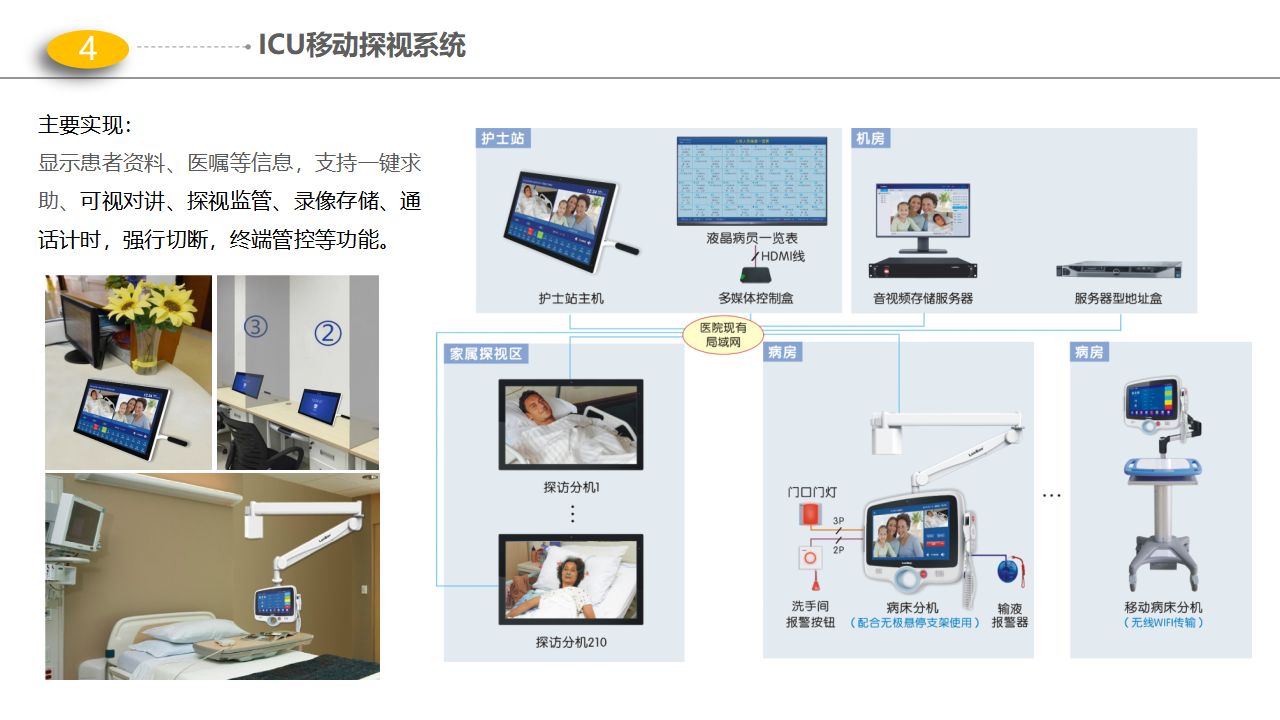
医院智能化解决方案-门(急)诊、医技、智能化项目解决方案
【版权声明】本资料来源网络,知识分享,仅供个人学习,请勿商用。【侵删致歉】如有侵权请联系小编,将在收到信息后第一时间删除!完整资料领取见文末,部分资料内容:篇幅有限,无法完全展…...

判断元素是否在可视区域
前言 在日常开发中,我们经常需要判断目标元素是否在视窗之内或者和视窗的距离小于一个值(例如 100 px),从而实现一些常用的功能,例如: 图片的懒加载列表的无限滚动计算广告元素的曝光情况可点击链接的预加…...

告别传统繁杂的采购合同管理 打造企业自动化采购管理模式
随着企业竞争日趋激烈,采购成本压力剧增,企业对于采购合同管理更加严格,从而把控物资成本。对于任何一家企业采购来说,规范化合同的全面管理,是采购活动中重要的一个环节。 但在如今,依旧有很多企业采购合…...
【prism】路由事件映射到Command命令
在之前的一篇文章中,我介绍了普通的自定义事件: 【wpf】自定义事件总结(Action, EventHandler)_code bean的博客-CSDN博客_wpf action可以说通过Action和EventHandle,自定义事件是相当的方便简单了。https…...
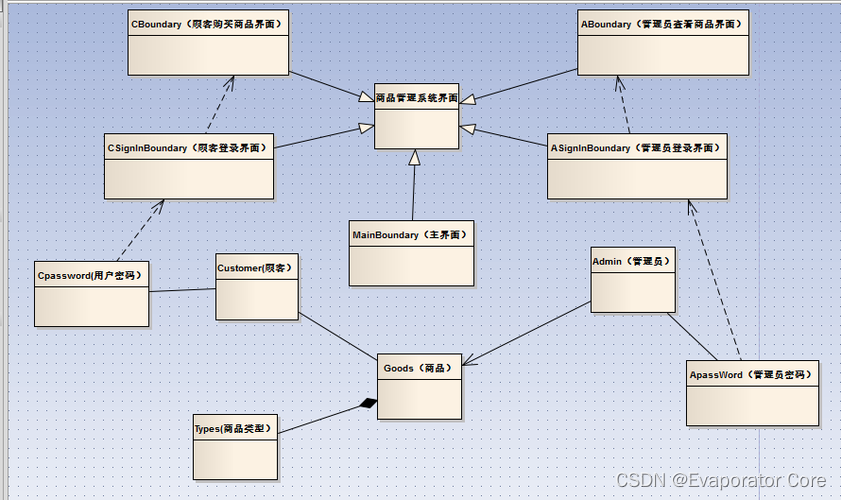
面向对象的基本概念和方法
面向对象的开发方法在近几十年见得以广泛应用,我们常见的Java语言就是一种典型的面向对象的开发语言。然而,面向对象的概念较为复杂,知识点也很细碎,本文整理了面向对象的基本概念和方法,供大家参考。为了便于读者理解…...

数据可视化大屏百度地图绘制行政区域标注实战案例解析(个性化地图、标注、视频、控件、定位、检索)
百度地图开发系列目录 数据可视化大屏应急管理综合指挥调度系统完整案例详解(PHP-API、Echarts、百度地图)数据可视化大屏百度地图API开发:停车场分布标注和检索静态版百度地图高级开发:map.getDistance计算多点之间的距离并输入…...

1.面向对象和类的关系?2.什么是Promise、3.Promise和async、await的关系
面向对象:面向对象是一种编程思想(oop)。(Js里面所有的东西都可以看做对象,Js它是基于原型的面向对象语言,采用原型的方式来构造对象)很多个具有相同属性和行为的对象就可以抽象为类,对象是类的一个实例。JavaScript在…...
【程序化天空盒】过程记录01:日月 天空渐变 大气散射
1 日月 SunAndMoon 昼夜的话肯定少不了太阳和月亮,太阳和月亮实现的道理是一样的,只不过是月亮比太阳多了一个需要控制月牙程度(or添加贴图)的细节~ 1.1 Sun 太阳的话很简单,直接在shader里实现一个太阳跟随平行光旋…...
无线通信中的轨道角动量
目录 一. 前言 二. 如何传输 三. 如何产生 3.1 螺旋结构器件 (1)螺旋相位板 (2)螺旋抛物面天线 3.2 超表面 3.3 天线阵列 3.3.1 相控阵 3.3.2 时控阵 四. 如何识别 一. 前言 轨道角动量:Orbital Angular M…...
以后更新功能,再也不用App发版了!智能小程序将为开发者最大化减负
在 IoT 时代,越来越多的企业意识到打造自有 App 对于品牌的重要性。作为智能设备不可或缺的控制终端,App 具备连接用户、完善服务、精细化运营用户的独特优势,可帮助企业大大提升品牌竞争力。 为了帮助品牌企业打造更具个性化、差异化的智能…...

C++之类模板全特化和偏特化
类模板类模板是通用类的描述,使用任意类型(泛型)来描述类的定义。使用类模板的时候,指定具体的数据类型,让编译器生成该类型的类定义。注意:函数模板中可以不指定具体数据类型,让编译器自动推到…...
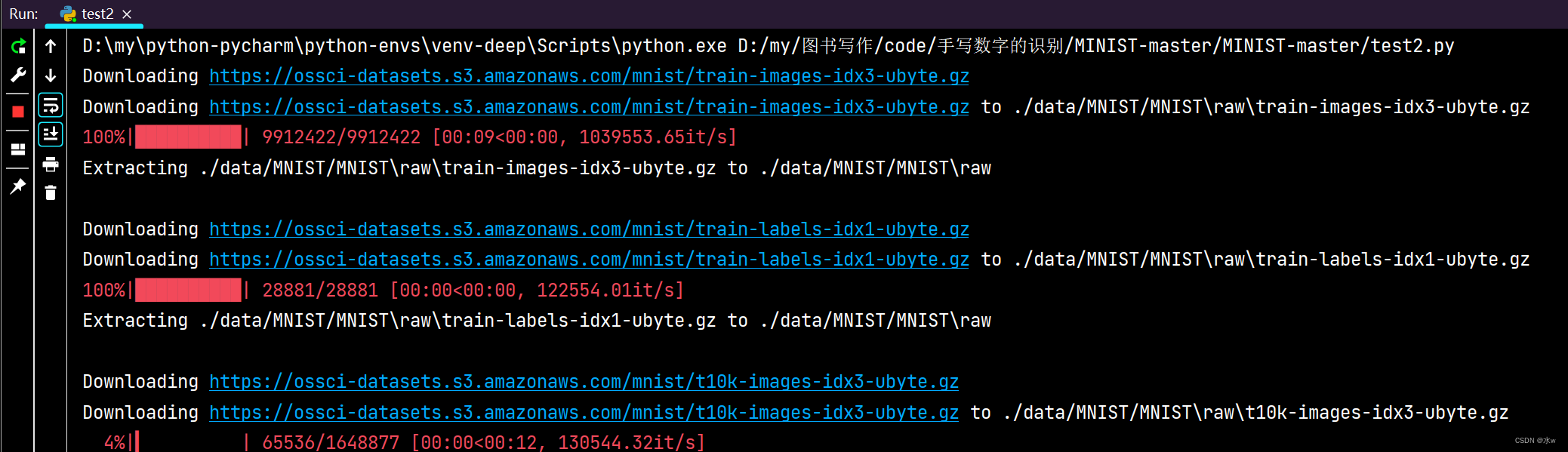
Python 手写数字识别 MNIST数据集下载失败
目录 一、MNIST数据集下载失败 1 失败的解决办法(经验教训): 2 亲测有效的解决方法: 一、MNIST数据集下载失败 场景复现:想要pytorchMINIST数据集来实现手写数字识别,首先就是进行MNIST数据集的下载&am…...
)
华为机试题:HJ61 放苹果(python)
文章目录博主精品专栏导航知识点详解1、input():获取控制台(任意形式)的输入。输出均为字符串类型。1.1、input() 与 list(input()) 的区别、及其相互转换方法2、print() :打印输出。3、整型int() :将指定进制…...

【论文速递】ICCV2021 - 基于超相关压缩实现实时高精度的小样本语义分割
【论文速递】ICCV2021 - 基于超相关压缩的小样本语义分割 【论文原文】:Hypercorrelation Squeeze for Few-Shot Segmentation 【作者信息】:Juhong Min Dahyun Kang Minsu Cho 获取地址:https://openaccess.thecvf.com/content/ICCV2021/…...
)
单例模式(Singleton Pattern)
目录 1.什么是单例模式: 2.单例模式存在的原因: 3.单例模式的优缺点: 4.创建方式: 1. 单线程单例模式立即创建(饿汉式): 2. 单线程单例模式延迟创建(懒汉式)…...

docker file和compose
文章目录1.dockerfile(单机脚本)1.概念2.原理3.dockerfile核心四步4.命令2.docker compose1.概念2.注意事项3.常用字段4.常用命令1.dockerfile(单机脚本) 1.概念 通过脚本,生成一个镜像,并运行对应的容器…...
如何解决thinkphp验证码不能显示问题?
thinkPHP做验证码这一块,可以使用自带的验证码扩展,具体步骤如下: 一、安装扩展 composer require topthink/think-captcha 二、模版中使用 将原来静态页面的验证码图片替换为{:captcha_img()},这个会自动生成验证码图片。 <div>{:captcha_img()}</div> 或者 &…...
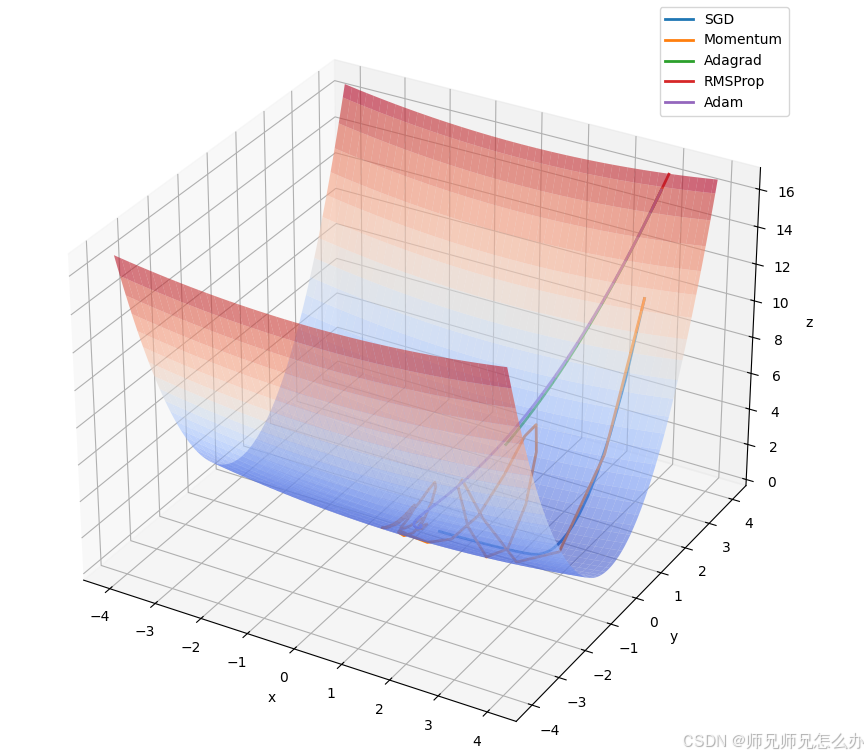
【人工智能】神经网络的优化器optimizer(二):Adagrad自适应学习率优化器
一.自适应梯度算法Adagrad概述 Adagrad(Adaptive Gradient Algorithm)是一种自适应学习率的优化算法,由Duchi等人在2011年提出。其核心思想是针对不同参数自动调整学习率,适合处理稀疏数据和不同参数梯度差异较大的场景。Adagrad通…...
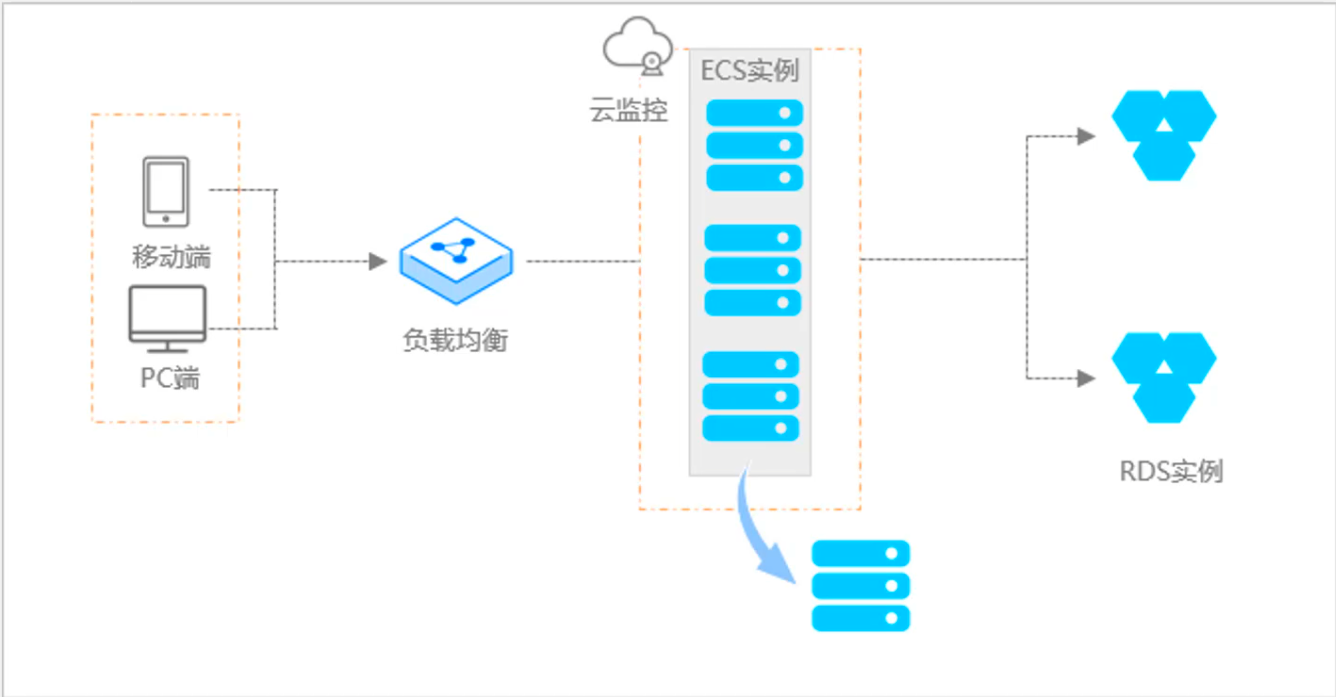
阿里云ACP云计算备考笔记 (5)——弹性伸缩
目录 第一章 概述 第二章 弹性伸缩简介 1、弹性伸缩 2、垂直伸缩 3、优势 4、应用场景 ① 无规律的业务量波动 ② 有规律的业务量波动 ③ 无明显业务量波动 ④ 混合型业务 ⑤ 消息通知 ⑥ 生命周期挂钩 ⑦ 自定义方式 ⑧ 滚的升级 5、使用限制 第三章 主要定义 …...

mongodb源码分析session执行handleRequest命令find过程
mongo/transport/service_state_machine.cpp已经分析startSession创建ASIOSession过程,并且验证connection是否超过限制ASIOSession和connection是循环接受客户端命令,把数据流转换成Message,状态转变流程是:State::Created 》 St…...

涂鸦T5AI手搓语音、emoji、otto机器人从入门到实战
“🤖手搓TuyaAI语音指令 😍秒变表情包大师,让萌系Otto机器人🔥玩出智能新花样!开整!” 🤖 Otto机器人 → 直接点明主体 手搓TuyaAI语音 → 强调 自主编程/自定义 语音控制(TuyaAI…...

HTML前端开发:JavaScript 常用事件详解
作为前端开发的核心,JavaScript 事件是用户与网页交互的基础。以下是常见事件的详细说明和用法示例: 1. onclick - 点击事件 当元素被单击时触发(左键点击) button.onclick function() {alert("按钮被点击了!&…...
JUC笔记(上)-复习 涉及死锁 volatile synchronized CAS 原子操作
一、上下文切换 即使单核CPU也可以进行多线程执行代码,CPU会给每个线程分配CPU时间片来实现这个机制。时间片非常短,所以CPU会不断地切换线程执行,从而让我们感觉多个线程是同时执行的。时间片一般是十几毫秒(ms)。通过时间片分配算法执行。…...

什么?连接服务器也能可视化显示界面?:基于X11 Forwarding + CentOS + MobaXterm实战指南
文章目录 什么是X11?环境准备实战步骤1️⃣ 服务器端配置(CentOS)2️⃣ 客户端配置(MobaXterm)3️⃣ 验证X11 Forwarding4️⃣ 运行自定义GUI程序(Python示例)5️⃣ 成功效果
【碎碎念】宝可梦 Mesh GO : 基于MESH网络的口袋妖怪 宝可梦GO游戏自组网系统
目录 游戏说明《宝可梦 Mesh GO》 —— 局域宝可梦探索Pokmon GO 类游戏核心理念应用场景Mesh 特性 宝可梦玩法融合设计游戏构想要素1. 地图探索(基于物理空间 广播范围)2. 野生宝可梦生成与广播3. 对战系统4. 道具与通信5. 延伸玩法 安全性设计 技术选…...

2025季度云服务器排行榜
在全球云服务器市场,各厂商的排名和地位并非一成不变,而是由其独特的优势、战略布局和市场适应性共同决定的。以下是根据2025年市场趋势,对主要云服务器厂商在排行榜中占据重要位置的原因和优势进行深度分析: 一、全球“三巨头”…...

JAVA后端开发——多租户
数据隔离是多租户系统中的核心概念,确保一个租户(在这个系统中可能是一个公司或一个独立的客户)的数据对其他租户是不可见的。在 RuoYi 框架(您当前项目所使用的基础框架)中,这通常是通过在数据表中增加一个…...