手撕 视觉slam14讲 ch7 / pose_estimation_3d2d.cpp (1)
首先理清我们需要实现什么功能,怎么实现,提供一份整体逻辑:包括主函数和功能函数
主函数逻辑:
1. 读图,两张rgb(cv::imread)
2. 找到两张rgb图中的特征点匹配对
2.1定义所需要的参数:keypoints1, keypoints2,matches
2.2 提取每张图像的检测 Oriented FAST 角点位置并匹配筛选(调用功能函数1)
3. 建立3d点(像素坐标到相机坐标)
3.1读出深度图(cv::imread)
3.2取得每个匹配点对的深度
3.2.1 得到第y行,第x个像素的深度值
(ushort d = d1.ptr<unsigned short> (row)[column])
3.2.2 去除没有深度的点
3.2.3 转到相机坐标系(调用功能函数2)
4. 调用epnp求解(input:3d点,2d点对,内参,是否去畸变,求解方式)
4.1求解(cv::solvePnP)
4.2 求解结果为向量,需要转成矩阵(cv::Rodrigues)
int main( int agrc, char** agrv) {
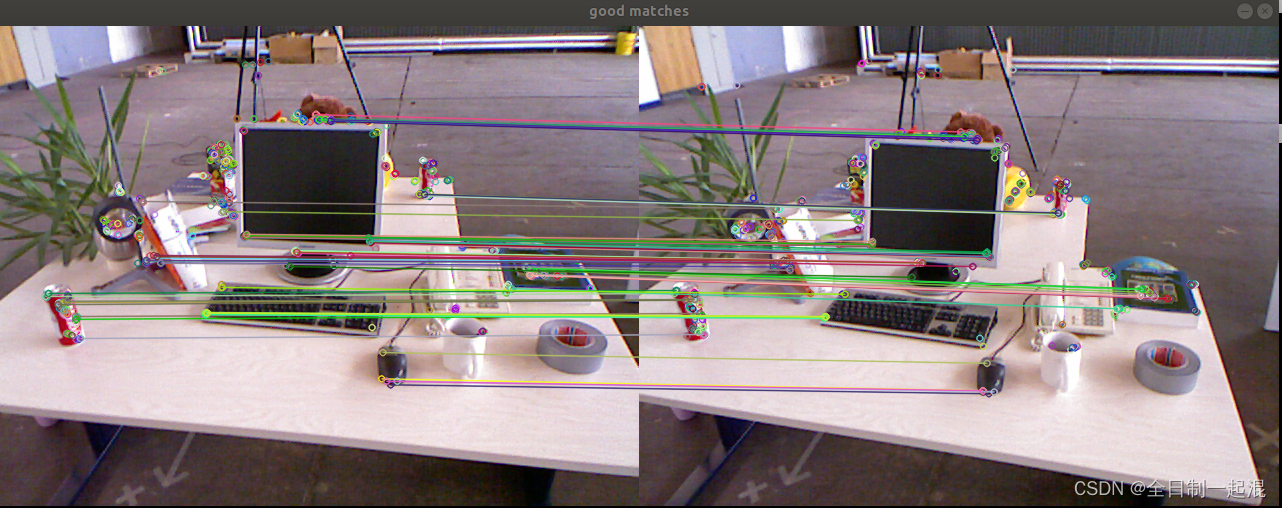
// 1. 读图(两张rgb)Mat image1 = imread(agrv[1] , CV_LOAD_IMAGE_COLOR );Mat image2 = imread(agrv[2] , CV_LOAD_IMAGE_COLOR );assert(image1.data && image2.data && "Can not load images!");// 2. 找到两张rgb图中的特征点匹配对// 2.1定义keypoints1, keypoints2,matchesstd::vector<KeyPoint>keypoints1,keypoints2;std::vector<DMatch>matches;// 2.2 提取每张图像的检测 Oriented FAST 角点位置并匹配筛选Featurematcher(image1,image2, keypoints1,keypoints2,matches);// 3. 建立3d点(像素坐标到相机坐标)Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);//内参vector<Point3f> pts_3d;vector<Point2f> pts_2d;//3.1读出深度图Mat d1 =imread(agrv[3],CV_LOAD_IMAGE_UNCHANGED);//3.2取得每个匹配点对的深度(ushort d = d1.ptr<unsigned short> (row)[column];就是指向d1的第row行的第column个数据。数据类型为无符号的短整型 )for (DMatch m: matches){//3.2.1 得到第y行,第x个位置的像素的深度值ushort d = d1.ptr<unsigned short>(int (keypoints1[m.queryIdx].pt.y)) [int(keypoints1[m.queryIdx].pt.x)];// 3.2.2 去除没有深度的点if(d==0){continue;}float dd=d/5000.0 ;//3.2.3 转到相机坐标系Point2d p1 = pixtocam(keypoints1[m.queryIdx].pt , K);pts_3d.push_back(Point3f(p1.x*dd,p1.y*dd,dd));pts_2d.push_back(keypoints2[m.trainIdx].pt);}cout << "3d-2d pairs: " << pts_3d.size() << endl;// 4. 调用epnp求解(input:3d点,2d点对,内参,false,求解方式)// solvePnP( InputArray objectPoints, InputArray imagePoints, InputArray cameraMatrix, InputArray distCoeffs, OutputArray rvec, OutputArray tvec, bool useExtrinsicGuess = false, int flags = SOLVEPNP_ITERATIVE );Mat r,t;// 4.1求解solvePnP(pts_3d,pts_2d,K,Mat(), r,t,false,SOLVEPNP_EPNP);// 4.2 求解结果为向量,需要转成矩阵Mat R;cv::Rodrigues(r,R);cout<<"R="<<R<<endl;cout<<"T="<<t<<endl;// 5.可视化匹配Mat img_goodmatch;drawMatches(image1, keypoints1, image2, keypoints2, matches, img_goodmatch);imshow("good matches", img_goodmatch);waitKey(0);return 0;
}功能函数1: Featurematcher
实现过程在前几篇中已经详细说明:视觉slam14讲 逐行解析代码 ch7 / orb_cv.cpp
2.2.1初始化存储特征点数据的变量
2.2.2 提取每张图像的检测 Oriented FAST 角点位置
2.2.3 计算图像角点的BRIEF描述子
2.2.4 根据刚刚计算好的BRIEF描述子,对两张图的角点进行匹配
2.2.5 匹配点对筛选计算最小距离和最大距离
2.2.6 当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
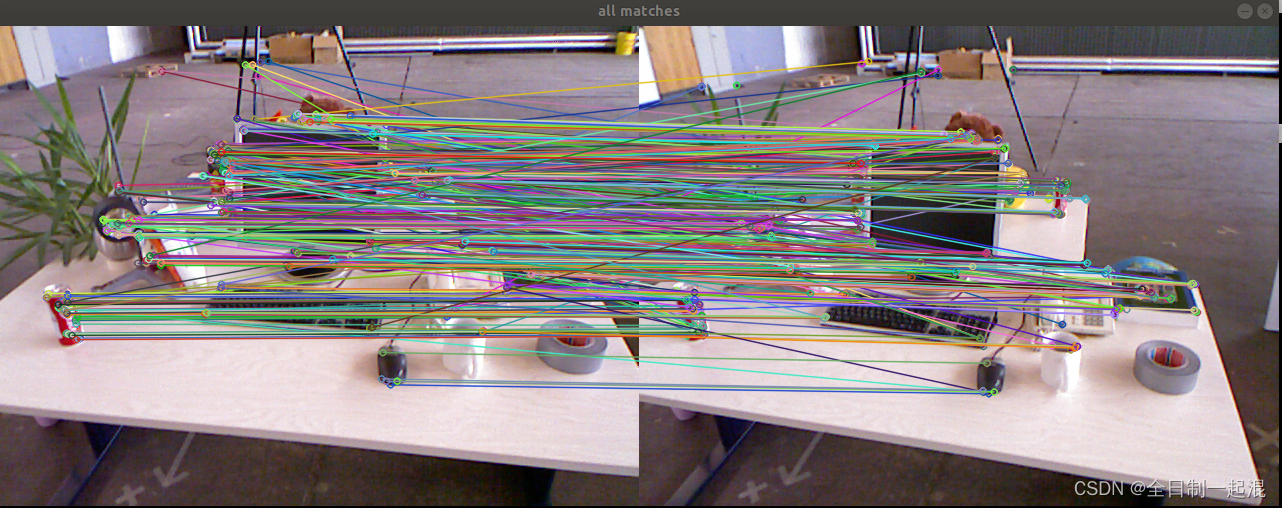
void Featurematcher( const Mat &image1, const Mat &image2, std::vector<KeyPoint>&keypoints1, std::vector<KeyPoint> &keypoints2, std::vector<DMatch> &matches){// 2.2.1初始化存储特征点数据的变量Mat descr1, descr2;Ptr<FeatureDetector> detector = ORB::create();Ptr<DescriptorExtractor> descriptor = ORB::create();Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");// 2.2.2 提取每张图像的检测 Oriented FAST 角点位置detector->detect(image1, keypoints1);detector->detect(image2, keypoints2);// 2.2.3 计算图像角点的BRIEF描述子descriptor->compute(image1, keypoints1, descr1);descriptor->compute(image2, keypoints2, descr2);// 2.2.4 根据刚刚计算好的BRIEF描述子,对两张图的角点进行匹配std::vector<DMatch> match;matcher->match(descr1, descr2, match);Mat img_match;drawMatches(image1, keypoints1, image2, keypoints2, match, img_match);imshow("all matches", img_match);waitKey(0);// 2.2.5 匹配点对筛选计算最小距离和最大距离double min_dis = 10000, max_dis = 0;// 2.2.5.1找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离for (int i = 0; i < descr1.rows; i++){double dist = match[i].distance;if (dist < min_dis)min_dis = dist;if (dist > max_dis)max_dis = dist;}cout<<"max_dis="<<max_dis<<endl;cout<<"min_dis="<<min_dis<<endl;//2.2.6 当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.for (int i = 0; i < descr1.rows; i++){if (match[i].distance<= max(2*min_dis,30.0)){matches.push_back(match[i]);} }cout<<"matches.size="<<matches.size()<<endl;
}
功能函数2:
将输入的像素坐标(x ,y)转化到归一化相机坐标系下得到(X,Y)
我们知道:相机的投影模型为:, 即
所以 ,
Point2d pixtocam(const Point2d &p , const Mat &K){return Point2d(// X=(u-cx)/fx(p.x - K.at<double>(0,2)) / K.at<double>(0,0) ,// Y=(v-cy)/fy(p.y-K.at<double>(1,2)) / K.at<double>(1,1));
}
最后匹配效果及位姿结果:
allmatch:
goodmatch:
位姿输出:R,T: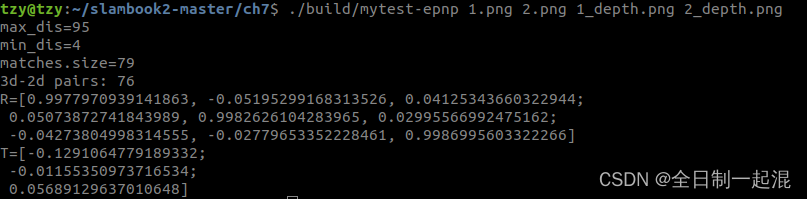
相关文章:
手撕 视觉slam14讲 ch7 / pose_estimation_3d2d.cpp (1)
首先理清我们需要实现什么功能,怎么实现,提供一份整体逻辑:包括主函数和功能函数 主函数逻辑: 1. 读图,两张rgb(cv::imread) 2. 找到两张rgb图中的特征点匹配对 2.1定义所需要的参数:keypoints…...

Mac安装Dart时,Homebrew报错 Error: Failure while executing
前言: 最近准备开发Flutter项目时,在安装环境时,安装Homebew时遇到了以下报错信息,在这里分享一下。 报错信息: ~ % brew tap dart-lang/dart > Tapping dart-lang/dart Cloning into /opt/homebrew/Library/Tap…...

SSM整合~
构建并配置项目: 第一步:创建maven项目 第二步:配置pom.xml文件 设置打包方式: 为了方便部署,我们通常情况下,将项目打包为WAR,因为WAR文件是一种可执行的压缩文件,它可以将项目…...

Self-supervised 3D Human Pose Estimation from a Single Image
基于单幅图像的自监督三维人体姿态估计 主页: https://josesosajs.github.io/ imagepose/ 源码:未开源 摘要 我们提出了一种新的自我监督的方法预测三维人体姿势从一个单一的图像。预测网络是从描绘处于典型姿势的人的未标记图像的数据集和一组未配对…...

ubuntu下cups部分场景
第一章:部分操作指令 在计算机领域中,cups 是“通用UNIX打印系统”(Common UNIX Printing System)的缩写,它是一种用于在UNIX-like操作系统上管理打印任务的开源打印系统。cups 提供了一个框架,允许用户和…...

通过geoserver imageMosic发布多张tif数据
通过geoserver imageMosic发布多张tif数据 reference: https://zhuanlan.zhihu.com/p/132388558 https://zhuanlan.zhihu.com/p/103674876 https://docs.geoserver.org/latest/en/user/tutorials/imagemosaic_timeseries/imagemosaic_timeseries.html 步骤 下载数据 http…...
输出图元(四)8-2 OpenGL画点函数、OpenGL画线函数
4.3 OpenGL画点函数 要描述一个点的几何要素,我们只需在世界坐标系中指定一个位置。然后该坐标位置和场景中已有的其他几何描述一起被传递给观察子程序。除非指定其他属性值,OpenGL 图元按默认的大小和颜色来显示。默认的图元颜色是白色&#x…...
java八股文
6. 如何保证消息的可靠性? 在RabbitMq的整个消息投递过程中,有三种情况下,会存在消息丢失的问题: 6. RabbitMq如何保证消息的可靠性? 所以从这三个维度保证消息的可靠性去可靠性传递就可以了,从生产者发送…...
算法通关村——解析堆的应用
在数组中找第K大的元素 LeetCode21 Medium 我们要找第 K 大的元素,如果我们找使用大堆的话那么就会造成这个堆到底需要多大的,而且哪一个是第 K 的的元素我们不知道是哪一个索引,我们更想要的结果就是根节点就是我们要找的值,所以…...

爬虫源码---爬取小猫猫交易网站
前言: 本片文章主要对爬虫爬取网页数据来进行一个简单的解答,对与其中的数据来进行一个爬取。 一:环境配置 Python版本:3.7.3 IDE:PyCharm 所需库:requests ,parsel 二:网站页面 我们需要…...
Python的由来和基础语法(一)
目录 一、Python 背景知识 1.1Python 是咋来的? 1.2Python 都能干啥? 1.3Python 的优缺点 二、基础语法 2.1常量和表达式 2.2变量和类型 变量的语法 (1) 定义变量 (2) 使用变量 变量的类型 (1) 整数 (2) 浮点数(小数) (3) 字符串 (4) 布尔 (5) 其他 动态类型…...
使用maven创建springboot项目
创建maven快速启动项目 命令行或者idea、eclipse快捷创建也可以 pom.xml下project项目下导入springboot 父工程 <!--导入springboot 父工程--> <parent><artifactId>spring-boot-starter-parent</artifactId><groupId>org.springframework.bo…...

MySQL 基本操作1
目录 Create insert 插入跟新 1 插入跟新 2 Retrive select where 子句查询 1.查找数学成绩小于 80 的同学。 2.查询数学成绩等于90分的同学。 3.查询总分大于240 的学生 4.查询空值或者非空值 5.查询语文成绩在70~80之间的同学 6.查询英语成绩是99 和 93 和 19 和…...

linux内网yum源服务器搭建
1.nginx: location / {root /usr/local/Kylin-Server-V10-SP3-General-Release-2303-X86_64;autoindex on;autoindex_localtime on;autoindex_exact_size off; } 注:指定到镜像的包名 2.修改yum源地址 cd /etc/yum.repos.d/vim kylin_x86_64.repo 注: --enabled设置为1 3.重…...

机器学习与数据分析
【数据清洗】 异常检测 孤立森林(Isolation Forest)从原理到实践 效果评估:F-score 【1】 保护隐私的时间序列异常检测架构 概率后缀树 PST – (异常检测) 【1】 UEBA架构设计之路5: 概率后缀树模型 【…...
项目总结知识点记录-文件上传下载(三)
(1)文件上传 代码: RequestMapping(value "doUpload", method RequestMethod.POST)public String doUpload(ModelAttribute BookHelper bookHelper, Model model, HttpSession session) throws IllegalStateException, IOExcepti…...

基于LinuxC语言实现的TCP多线程/进程服务器
多进程并发服务器 设计流程 框架一(使用信号回收僵尸进程) void handler(int sig) {while(waitpid(-1, NULL, WNOHANG) > 0); }int main() {//回收僵尸进程siganl(17, handler);//创建服务器监听套接字 serverserver socket();//给服务器地址信息…...

浅谈JVM垃圾回收机制
一、HotSpot VM中的GC分为两大类 1.部分收集(Partial GC): 新生代收集(Minor GC/Young GC):只对新生代进行垃圾收集老年代收集(Major GC/Old GC):只队老年代进行垃圾收集混合收集(Mixed GC):对整个新生代和老年代进行垃圾收集 2.整堆收集(Full GC) 收集整个Java堆和方法区 …...
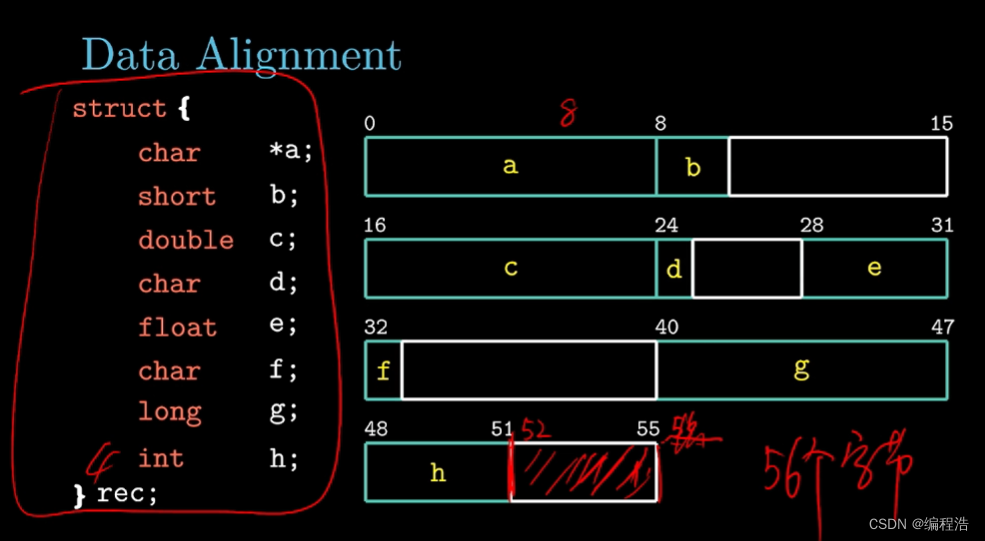
【80天学习完《深入理解计算机系统》】第十二天3.6数组和结构体
专注 效率 记忆 预习 笔记 复习 做题 欢迎观看我的博客,如有问题交流,欢迎评论区留言,一定尽快回复!(大家可以去看我的专栏,是所有文章的目录) 文章字体风格: 红色文字表示&#…...
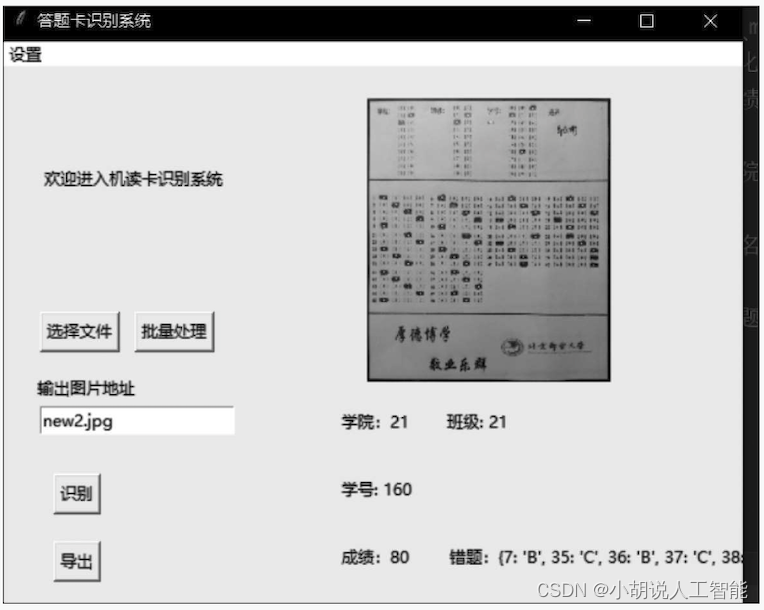
基于Python+OpenCV智能答题卡识别系统——深度学习和图像识别算法应用(含Python全部工程源码)+训练与测试数据集
目录 前言总体设计系统整体结构图系统流程图 运行环境Python 环境PyCharm安装OpenCV环境 模块实现1. 信息识别2. Excel导出模块3. 图形用户界面模块4. 手写识别模块 系统测试1. 系统识别准确率2. 系统识别应用 工程源代码下载其它资料下载 前言 本项目基于Python和OpenCV图像处…...
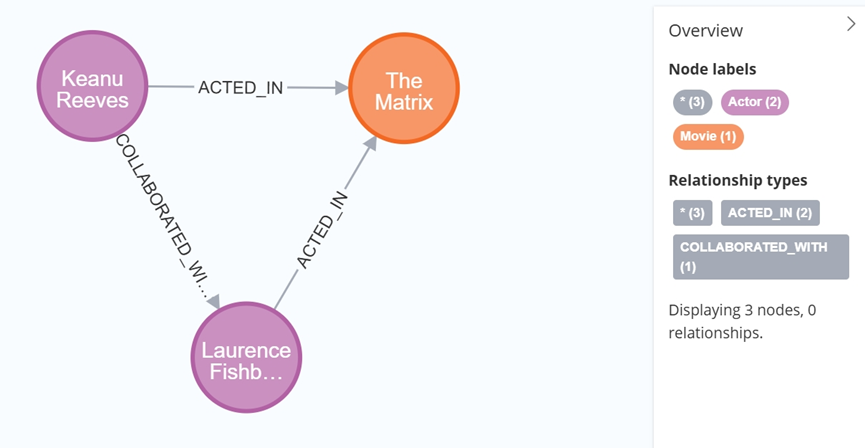
大数据学习栈记——Neo4j的安装与使用
本文介绍图数据库Neofj的安装与使用,操作系统:Ubuntu24.04,Neofj版本:2025.04.0。 Apt安装 Neofj可以进行官网安装:Neo4j Deployment Center - Graph Database & Analytics 我这里安装是添加软件源的方法 最新版…...

智慧医疗能源事业线深度画像分析(上)
引言 医疗行业作为现代社会的关键基础设施,其能源消耗与环境影响正日益受到关注。随着全球"双碳"目标的推进和可持续发展理念的深入,智慧医疗能源事业线应运而生,致力于通过创新技术与管理方案,重构医疗领域的能源使用模式。这一事业线融合了能源管理、可持续发…...
使用分级同态加密防御梯度泄漏
抽象 联邦学习 (FL) 支持跨分布式客户端进行协作模型训练,而无需共享原始数据,这使其成为在互联和自动驾驶汽车 (CAV) 等领域保护隐私的机器学习的一种很有前途的方法。然而,最近的研究表明&…...
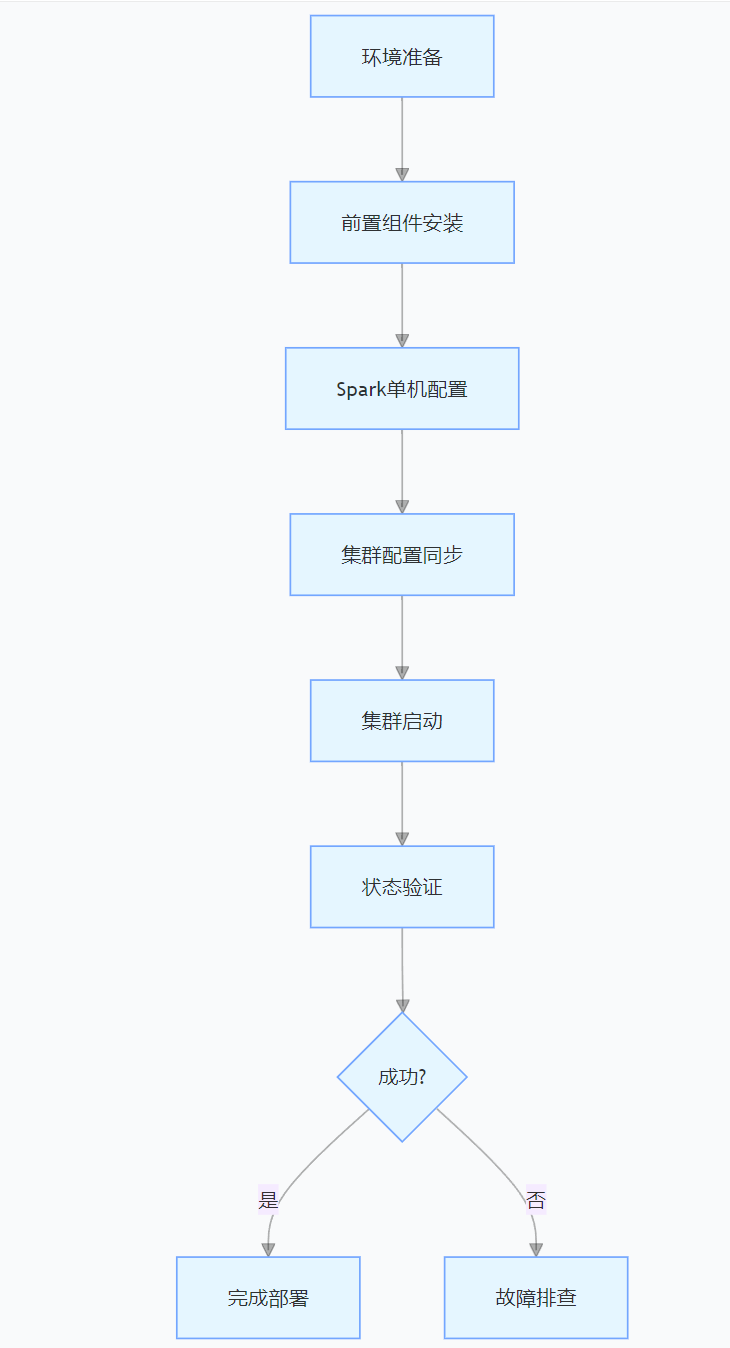
CentOS下的分布式内存计算Spark环境部署
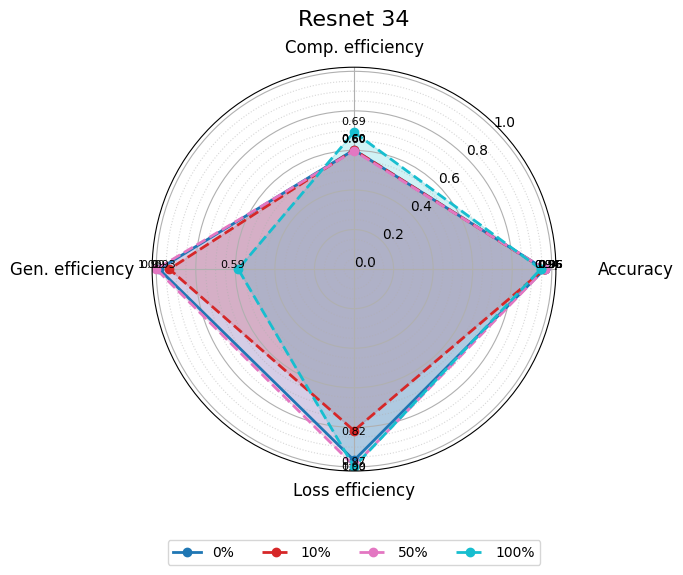
一、Spark 核心架构与应用场景 1.1 分布式计算引擎的核心优势 Spark 是基于内存的分布式计算框架,相比 MapReduce 具有以下核心优势: 内存计算:数据可常驻内存,迭代计算性能提升 10-100 倍(文档段落:3-79…...
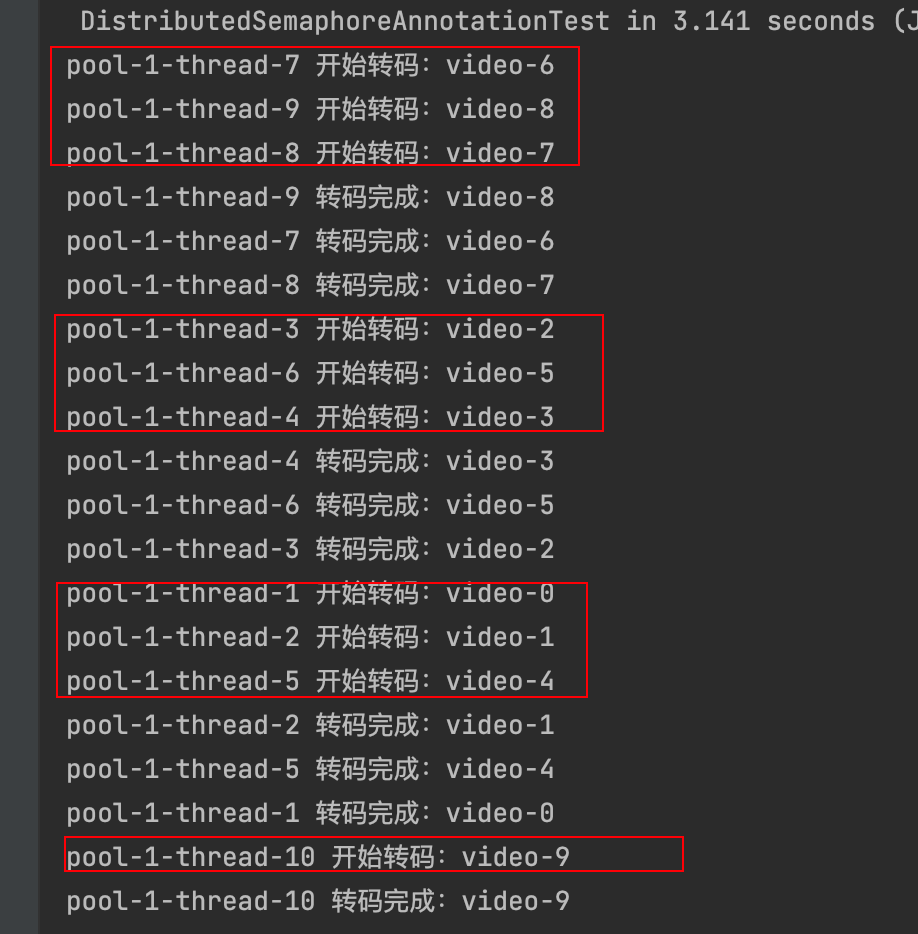
令牌桶 滑动窗口->限流 分布式信号量->限并发的原理 lua脚本分析介绍
文章目录 前言限流限制并发的实际理解限流令牌桶代码实现结果分析令牌桶lua的模拟实现原理总结: 滑动窗口代码实现结果分析lua脚本原理解析 限并发分布式信号量代码实现结果分析lua脚本实现原理 双注解去实现限流 并发结果分析: 实际业务去理解体会统一注…...
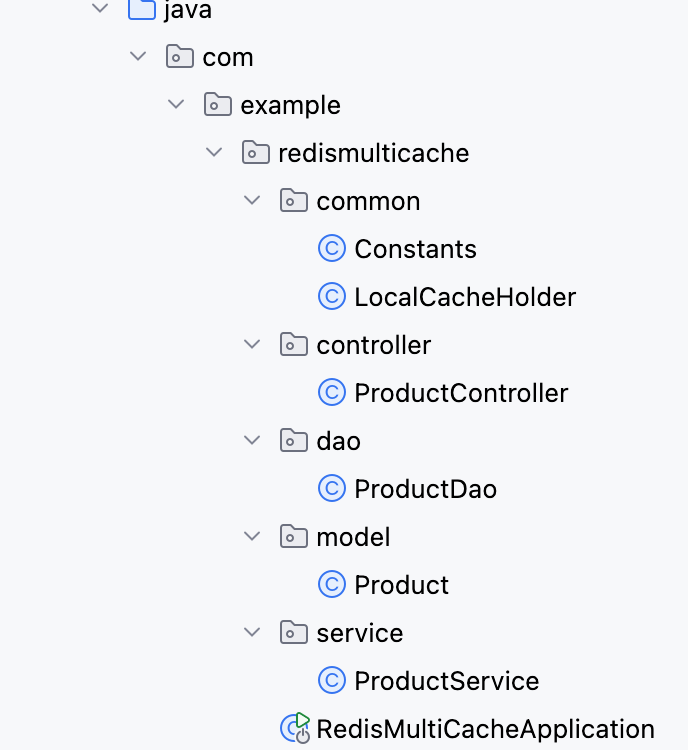
【Redis】笔记|第8节|大厂高并发缓存架构实战与优化
缓存架构 代码结构 代码详情 功能点: 多级缓存,先查本地缓存,再查Redis,最后才查数据库热点数据重建逻辑使用分布式锁,二次查询更新缓存采用读写锁提升性能采用Redis的发布订阅机制通知所有实例更新本地缓存适用读多…...
【从零学习JVM|第三篇】类的生命周期(高频面试题)
前言: 在Java编程中,类的生命周期是指类从被加载到内存中开始,到被卸载出内存为止的整个过程。了解类的生命周期对于理解Java程序的运行机制以及性能优化非常重要。本文会深入探寻类的生命周期,让读者对此有深刻印象。 目录 …...
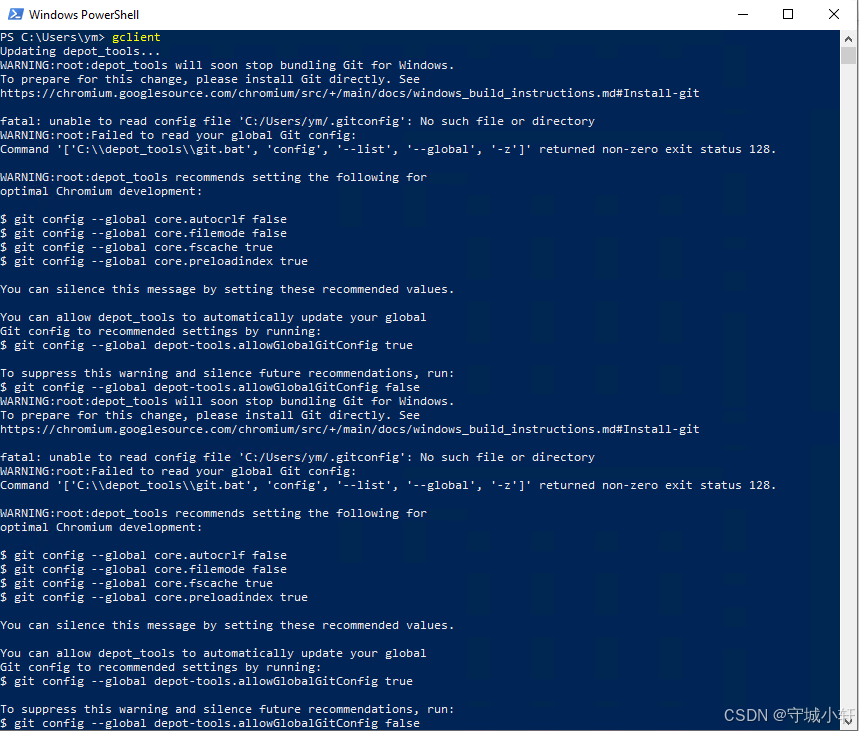
Chromium 136 编译指南 Windows篇:depot_tools 配置与源码获取(二)
引言 工欲善其事,必先利其器。在完成了 Visual Studio 2022 和 Windows SDK 的安装后,我们即将接触到 Chromium 开发生态中最核心的工具——depot_tools。这个由 Google 精心打造的工具集,就像是连接开发者与 Chromium 庞大代码库的智能桥梁…...

根目录0xa0属性对应的Ntfs!_SCB中的FileObject是什么时候被建立的----NTFS源代码分析--重要
根目录0xa0属性对应的Ntfs!_SCB中的FileObject是什么时候被建立的 第一部分: 0: kd> g Breakpoint 9 hit Ntfs!ReadIndexBuffer: f7173886 55 push ebp 0: kd> kc # 00 Ntfs!ReadIndexBuffer 01 Ntfs!FindFirstIndexEntry 02 Ntfs!NtfsUpda…...
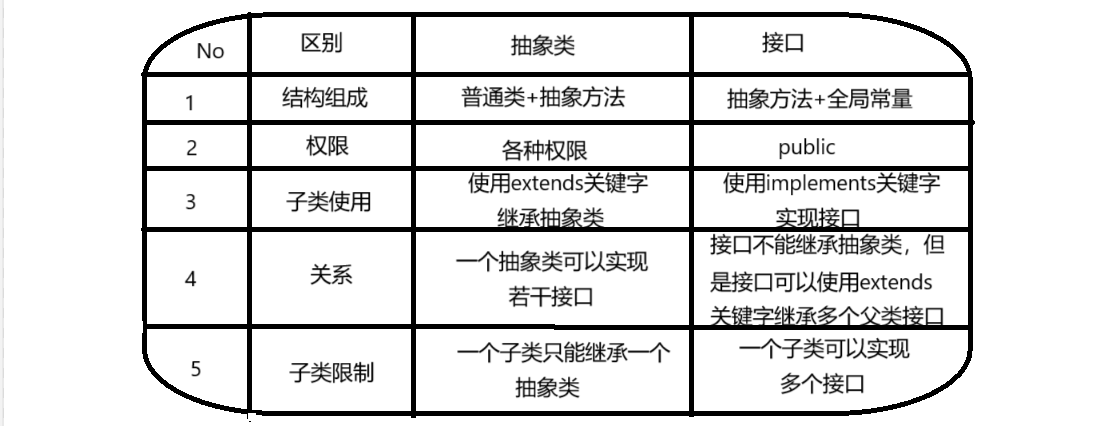
抽象类和接口(全)
一、抽象类 1.概念:如果⼀个类中没有包含⾜够的信息来描绘⼀个具体的对象,这样的类就是抽象类。 像是没有实际⼯作的⽅法,我们可以把它设计成⼀个抽象⽅法,包含抽象⽅法的类我们称为抽象类。 2.语法 在Java中,⼀个类如果被 abs…...