AI批量写文章伪原创:基于ChatGPT长文本模型,实现批量改写文章、批量回答问题(长期更新)
import traceback
import openai
import osopenai.api_key = ""conversation=[{"role": "system", "content": "You are a helpful assistant."}]
max_history_len = 20
first_message = Nonedir = r'J:\ai\input' #要改写的文档所在目录
#获取目录列表
list_dir = os.listdir(dir)
#打印目录列表
print(list_dir)
#遍历目录列表
for i in range(len(list_dir)):try:title = list_dir[i] #要改写的文档文件名称,新建一个intput目录,文档放在intput目录下print(title) #打印文档名称#这里要读取两次,第一次是计算循坏所需要的次数,第二次读取原文f = open("input/{}".format(title),'r',encoding= 'utf-8') #s = len(f.read()) // 400f.close()f = open("input/{}".format(title),'r',encoding= 'utf-8')for i in range(s+1):content = f.read(400)print('这是原文:', content + "\n")conversation =相关文章:
)
AI批量写文章伪原创:基于ChatGPT长文本模型,实现批量改写文章、批量回答问题(长期更新)
import traceback import openai import osopenai.api_key = ""conversation=[{"role": "system", "content": "You are a helpful assistant."}] max_history_len = 20 first_message = Nonedir = rJ:\ai\input #要改写的文…...

git常用场景记录 | 拉取远程分支A合并到本地分支B - 删除上一次的commit
文章目录 git常用场景记录拉取远程分支A合并到本地分支B本地分支B存在未add与commit的代码 删除上一次的commit已经push到远程库 git常用场景记录 doing,最后更新9.5 拉取远程分支A合并到本地分支B 需求描述 在团队合作时,我自己的本地分支B功能已经实现…...
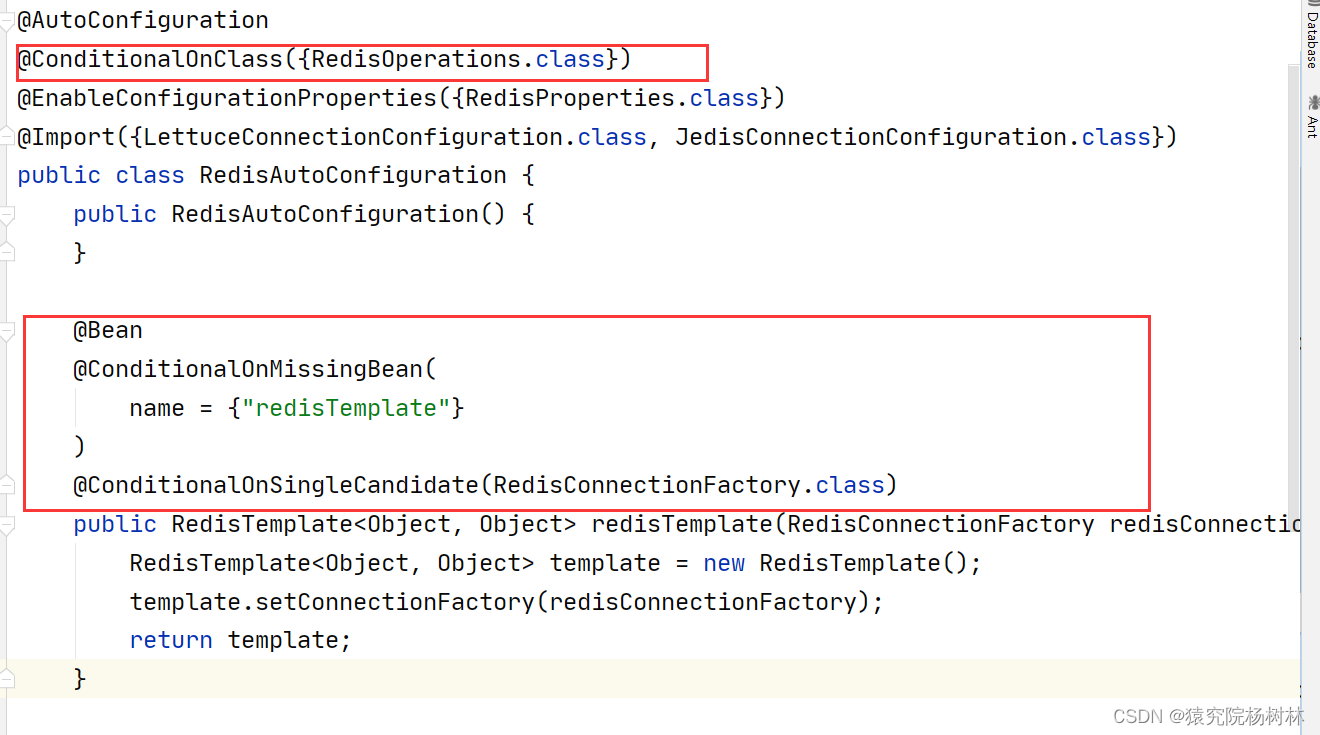
源码角度解析SpringBoot 自动配置
文章目录 前言一、了解相关注解1.Condition注解2.Enable注解 二、SpringBoot自动配置1.SpringBootApplication注解2.SpringBootConfiguration注解3.EnableAutoConfiguration注解4.Conditional注解 总结 前言 Spring Boot 自动配置是 Spring Boot 的核心特性之一,它…...

【原创】H3C路由器OSPF测试
网络拓扑图 路由器配置: 路由器1上接了4跟线,分别为这四个接口配置IP地址。 # interface GigabitEthernet0/0/0port link-mode routecombo enable copperip address 2.1.1.2 255.255.255.0 # interface GigabitEthernet0/0/1port link-mode routecombo…...

计算机视觉:轨迹预测综述
计算机视觉:轨迹预测综述 轨迹预测的定义轨迹预测的分类基于物理的方法(Physics-based)基于机器学习的方法(Classic Machine Learning-based)基于深度学习的方法(Deep Learning-based)基于强化学…...

三维跨孔电磁波CT数据可视化框架搭建
三维跨孔电磁波CT数据可视化框架搭建 文章目录 三维跨孔电磁波CT数据可视化框架搭建1、三维CT可视化结果2、matlab代码2.1、CT数据格式整理并保存2.2、三维可视化 利用matlab实现对跨孔电磁波CT实测数据反演,并搭建了三维CT数据可视化框架,可装填实测CT反…...

OC和Swift混编,导入头文件‘xxx-Swift.h‘ file not found
在OC的项目里加入Swift代码,创建完桥接文件后,需要倒入Swift头文件,头文件的格式为“项目名-Swift.h”。 如下图,我在Xcode上看到我的项目名为YichangPark,导入 #import "YiChangPark-Swift.h" 之后提示 “Y…...
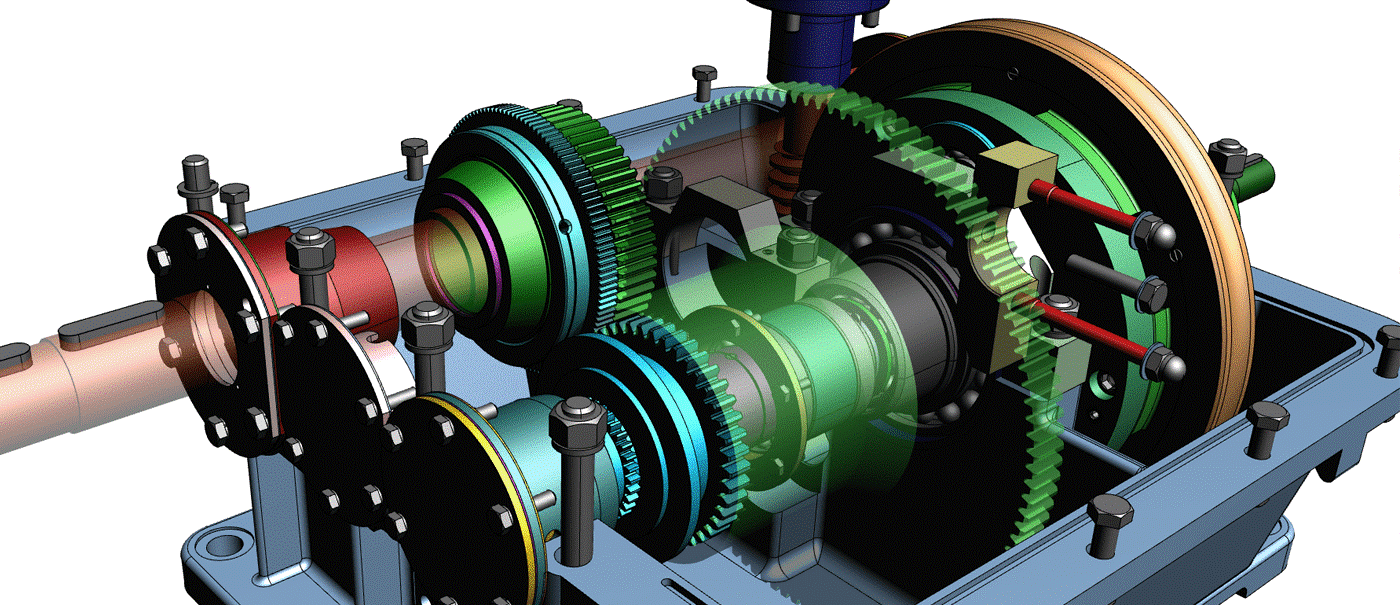
一文读懂HOOPS Native平台:快速开发桌面端、移动端3D应用程序!
HOOPS Native Platform是用于在桌面和移动平台以及混合现实应用程序上构建3D工程应用程序的首要工具包。它由三个集成良好的软件开发工具包(SDK)组成:HOOPS Visualize、HOOPS Exchange、HOOPS Publish。HOOPS Visualize 是一个强大的图形引擎,适用于本机…...

Scrum工作模式及Scrum工具
Scrum工作模式是一种敏捷软件开发方法,其核心是团队合作和自我组织,旨在通过短周期的迭代开发,实现快速反馈和持续改进。 Scrum工作模式包括以下角色和活动: 1、产品负责人(Product Owner):负…...
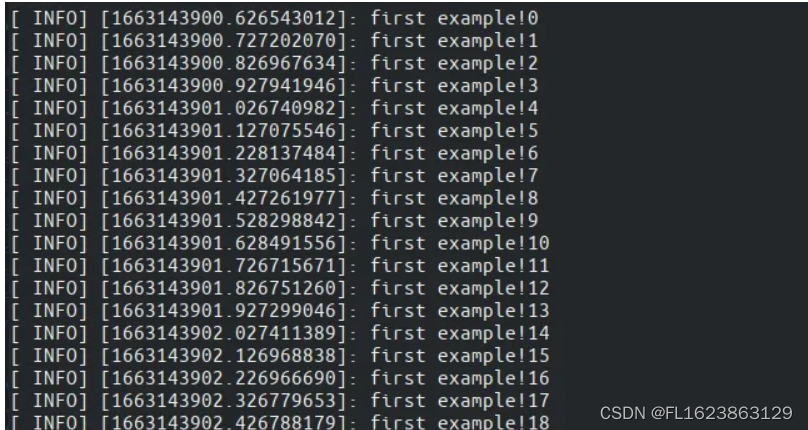
[ros][ubuntu]ros在ubuntu18.04上工作空间创建和发布一个话题
构建catkin工作空间 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src catkin_init_workspace cd ~/catkin_ws/ catkin_make 配置环境变量 echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc 检查环境变量 echo $ROS_PACKAGE_PATH…...

我的区块链笔记
区块链 中心化的账本,个人节点和中心节点的地位不对等,中心节点说了算。去中心化,个人节点就是公平的,根据一套规则,叫做公比机制。 区块链的本质,就是数据存储方式 区块链使用密码学算法产生的区块&…...

Spring事务(ACID特性、隔离级别、传播机制、失效场景)
一、事务的ACID特性 原子性(Atomicity) 原子性是指事务是一个不可分割的工作单位,事务中的操作要么都发生,要么都不发生。一致性(Consistency) 事务前后数据的完整性必须保持一致。隔离性(Isola…...

机器学习笔记之最优化理论与方法(六)无约束优化问题——最优性条件
机器学习笔记之最优化理论与方法——无约束优化问题[最优性条件] 引言无约束优化问题无约束优化问题最优解的定义 无约束优化问题的最优性条件无约束优化问题的充要条件无约束优化问题的必要条件无约束优化问题的充分条件 引言 本节将介绍无约束优化问题,主要介绍无…...

E5061B/是德科技keysight E5061B网络分析仪
181/2461/8938产品概述 是德科技E5061B(安捷伦)网络分析仪在从5 Hz到3 GHz的宽频率范围内提供通用的高性能网络分析。E5061B提供ENA系列常见的出色RF性能,还提供全面的LF(低频)网络测量能力;包括内置1 Mohm输入的增益相位测试端口。E5061B从低频到高频的…...
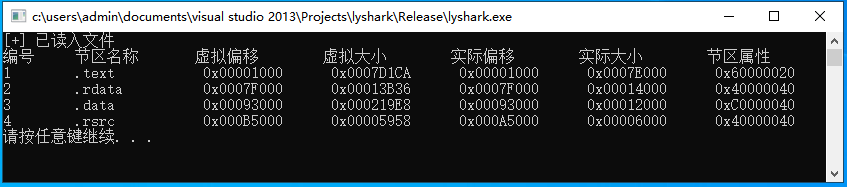
2.4 PE结构:节表详细解析
节表(Section Table)是Windows PE/COFF格式的可执行文件中一个非常重要的数据结构,它记录了各个代码段、数据段、资源段、重定向表等在文件中的位置和大小信息,是操作系统加载文件时根据节表来进行各个段的映射和初始化的重要依据…...
Vue2项目练手——通用后台管理项目第五节
Vue2项目练手——通用后台管理项目 首页组件布局面包屑&tag面包屑使用组件使用vuex存储面包屑数据src/store/tab.jssrc/components/CommonAside.vuesrc/components/CommonHeader.vue tag使用组件文件目录CommonTag.vueMain.vuetabs.js 用户管理页新增功能使用的组件页面布局…...

软件工程学术顶会——ESEC/FSE 2022 议题(网络安全方向)清单、摘要与总结
总结 本次会议中网络安全相关议题涵盖区块链、智能合约、符号执行、浏览器API模糊测试等不同研究领域。 热门研究方向: 1. 基于深度学习的漏洞检测与修复 2. 基于AI的自动漏洞修复 3. 模糊测试与漏洞发现 冷门研究方向: 1. 多语言代码的漏洞分析 2. 代码审查中的软件安全 3. 浏…...
从C语言到C++_36(智能指针RAII)auto_ptr+unique_ptr+shared_ptr+weak_ptr
目录 1. 智能指针的引入_内存泄漏 1.1 内存泄漏 1.2 如何避免内存泄漏 2. RAII思想 2.1 RAII解决异常安全问题 2.2 智能指针原理 3. auto_ptr 3.1 auto_ptr模拟代码 4. unique_ptr 4.1 unique_ptr模拟代码 5. shared_ptr 5.1 shared_ptr模拟代码 5.2 循环引用 6.…...
C++信息学奥赛1187:统计字符数
#include <bits/stdc.h> using namespace std; int main() {string arr;cin >> arr; // 输入一个字符串int n, a, max; // 定义变量n, a, maxchar ArrMax; // 定义字符变量ArrMaxn arr.length(); // 获取字符串长度max a 0; // 初始化max和a为0// 外层循环&…...
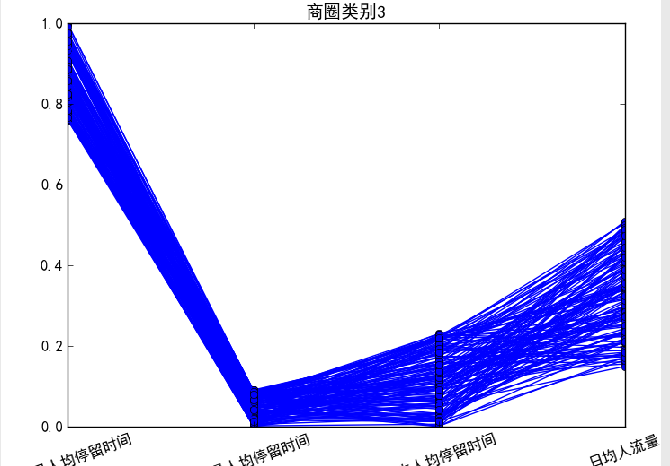
计算机毕设 大数据商城人流数据分析与可视化 - python 大数据分析
文章目录 0 前言课题背景分析方法与过程初步分析:总体流程:1.数据探索分析2.数据预处理3.构建模型 总结 最后 0 前言 🔥 这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到…...
详解)
后进先出(LIFO)详解
LIFO 是 Last In, First Out 的缩写,中文译为后进先出。这是一种数据结构的工作原则,类似于一摞盘子或一叠书本: 最后放进去的元素最先出来 -想象往筒状容器里放盘子: (1)你放进的最后一个盘子(…...
【HarmonyOS 5.0】DevEco Testing:鸿蒙应用质量保障的终极武器
——全方位测试解决方案与代码实战 一、工具定位与核心能力 DevEco Testing是HarmonyOS官方推出的一体化测试平台,覆盖应用全生命周期测试需求,主要提供五大核心能力: 测试类型检测目标关键指标功能体验基…...
MMaDA: Multimodal Large Diffusion Language Models
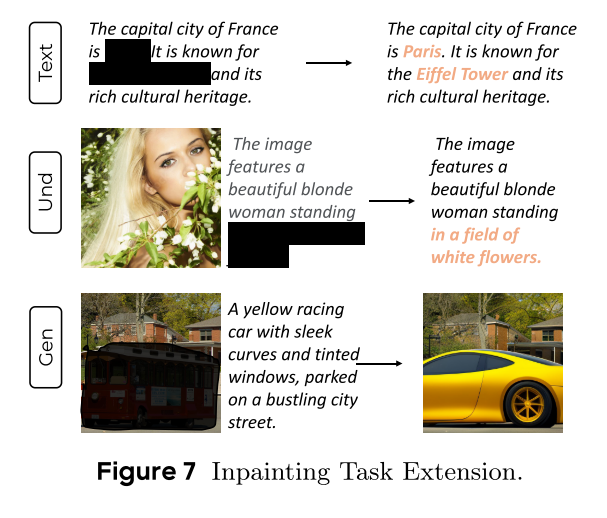
CODE : https://github.com/Gen-Verse/MMaDA Abstract 我们介绍了一种新型的多模态扩散基础模型MMaDA,它被设计用于在文本推理、多模态理解和文本到图像生成等不同领域实现卓越的性能。该方法的特点是三个关键创新:(i) MMaDA采用统一的扩散架构…...

C++ 基础特性深度解析
目录 引言 一、命名空间(namespace) C 中的命名空间 与 C 语言的对比 二、缺省参数 C 中的缺省参数 与 C 语言的对比 三、引用(reference) C 中的引用 与 C 语言的对比 四、inline(内联函数…...
指令的指南)
在Ubuntu中设置开机自动运行(sudo)指令的指南
在Ubuntu系统中,有时需要在系统启动时自动执行某些命令,特别是需要 sudo权限的指令。为了实现这一功能,可以使用多种方法,包括编写Systemd服务、配置 rc.local文件或使用 cron任务计划。本文将详细介绍这些方法,并提供…...

CRMEB 框架中 PHP 上传扩展开发:涵盖本地上传及阿里云 OSS、腾讯云 COS、七牛云
目前已有本地上传、阿里云OSS上传、腾讯云COS上传、七牛云上传扩展 扩展入口文件 文件目录 crmeb\services\upload\Upload.php namespace crmeb\services\upload;use crmeb\basic\BaseManager; use think\facade\Config;/*** Class Upload* package crmeb\services\upload* …...
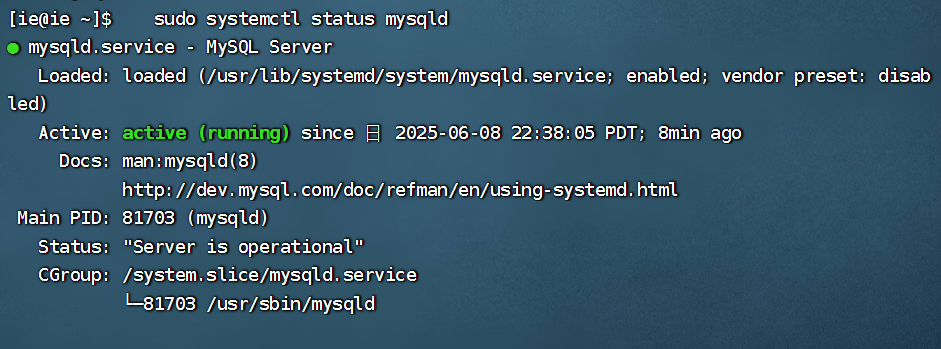
项目部署到Linux上时遇到的错误(Redis,MySQL,无法正确连接,地址占用问题)
Redis无法正确连接 在运行jar包时出现了这样的错误 查询得知问题核心在于Redis连接失败,具体原因是客户端发送了密码认证请求,但Redis服务器未设置密码 1.为Redis设置密码(匹配客户端配置) 步骤: 1).修…...

智能分布式爬虫的数据处理流水线优化:基于深度强化学习的数据质量控制
在数字化浪潮席卷全球的今天,数据已成为企业和研究机构的核心资产。智能分布式爬虫作为高效的数据采集工具,在大规模数据获取中发挥着关键作用。然而,传统的数据处理流水线在面对复杂多变的网络环境和海量异构数据时,常出现数据质…...

laravel8+vue3.0+element-plus搭建方法
创建 laravel8 项目 composer create-project --prefer-dist laravel/laravel laravel8 8.* 安装 laravel/ui composer require laravel/ui 修改 package.json 文件 "devDependencies": {"vue/compiler-sfc": "^3.0.7","axios": …...
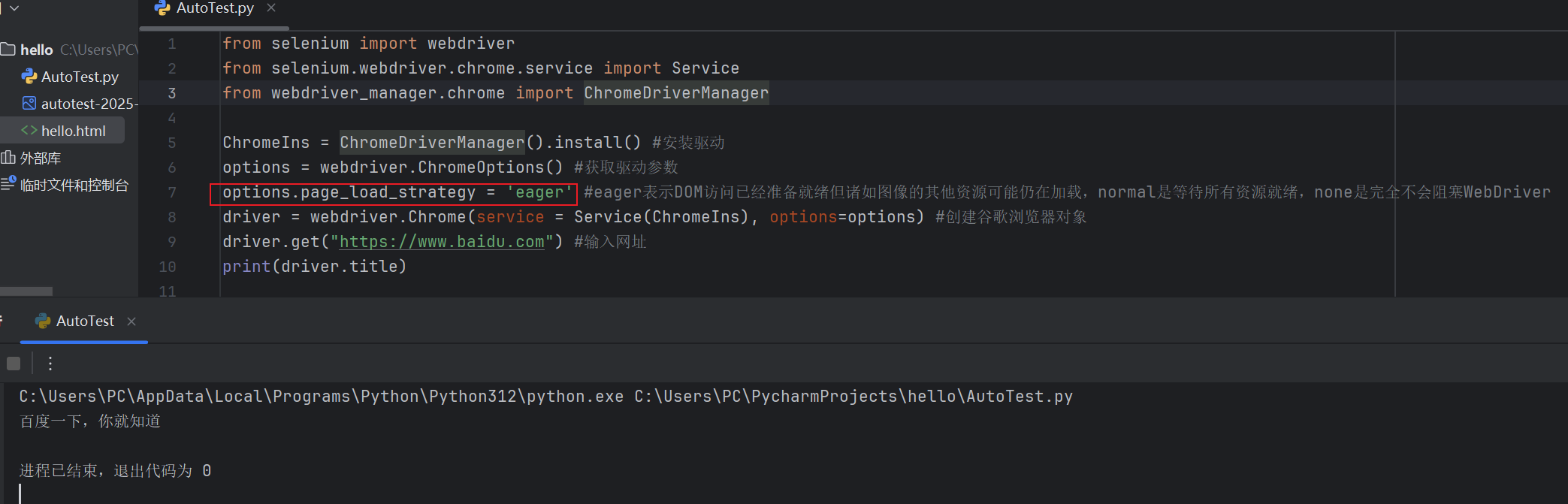
Selenium常用函数介绍
目录 一,元素定位 1.1 cssSeector 1.2 xpath 二,操作测试对象 三,窗口 3.1 案例 3.2 窗口切换 3.3 窗口大小 3.4 屏幕截图 3.5 关闭窗口 四,弹窗 五,等待 六,导航 七,文件上传 …...