智能小车之蓝牙控制并测速小车、wife控制小车、4g控制小车、语音控制小车
目录
1. 蓝牙控制小车
2. 蓝牙控制并测速小车
3. wifi控制测速小车
4. 4g控制小车
5. 语音控制小车
1. 蓝牙控制小车
- 使用蓝牙模块,串口透传
- 蓝牙模块,又叫做蓝牙串口模块
串口透传技术:
- 透传即透明传送,是指在数据的传输过程中,通过无线的方式这组数据不发生任何形式的改变,仿 佛传输过程是透明的一样,同时保证传输的质量,原封不动地到了最终接收者手里。
- 以太网,蓝牙,Zigbee, GPRS 等模块玩法一样,对嵌入式程序员来说,不需要关心通讯模块内部数据 及协议栈工作原理,只要通过串口编程获得数据即可

代码实现:
//main.c
#include "motor.h"
#include "delay.h"
#include "uart.h"void main()
{UartInit();while(1){stop();}
}//uart.c
#include "reg52.h"
#include "motor.h"
#include "string.h"
#include "delay.h"
sbit D5 = P3^7;
#define SIZE 12sfr AUXR = 0x8E;
char buffer[SIZE];void UartInit(void) //9600bps@11.0592MHz
{AUXR = 0x01;SCON = 0x50; //配置串口工作方式1,REN使能接收TMOD &= 0x0F;TMOD |= 0x20;//定时器1工作方式位8位自动重装TH1 = 0xFD;TL1 = 0xFD;//9600波特率的初值TR1 = 1;//启动定时器EA = 1;//开启总中断ES = 1;//开启串口中断
}//M1qian M2 hou M3 zuo M4 you
void Uart_Handler() interrupt 4
{static int i = 0;//静态变量,被初始化一次char tmp;if(RI)//中断处理函数中,对于接收中断的响应{RI = 0;//清除接收中断标志位tmp = SBUF;if(tmp == 'M'){i = 0;}buffer[i++] = tmp;//灯控指令if(buffer[0] == 'M'){switch(buffer[1]){case '1':goForward();Delay10ms();break;case '2':goBack();Delay10ms();break;case '3':goLeft();Delay10ms();break;case '4':goRight();Delay10ms();break;default:stop();break;}}if(i == 12) {memset(buffer, '\0', SIZE);i = 0;}}}//motor.c
#include "reg52.h"sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;void goForward()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 1;
}void goRight()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 0;
}void goLeft()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 1;
}void goBack()
{LeftCon1A = 1;LeftCon1B = 0;RightCon1A = 1;RightCon1B = 0;
}void stop()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 0;
}//delay.c#include "intrins.h"void Delay10ms() //@11.0592MHz
{unsigned char i, j;i = 18;j = 235;do{while (--j);} while (--i);
}void Delay1000ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 8;j = 1;k = 243;do{do{while (--k);} while (--j);} while (--i);
}2. 蓝牙控制并测速小车
原理:运用上面讲到的蓝牙模块和测速模块
代码实现:
//main.c
#include "motor.h"
#include "delay.h"
#include "uart.h"
#include "reg52.h"
#include "time.h"
#include "stdio.h"
#include "Oled.h"sbit speedIO = P3^2;//外部中断0
unsigned int speedCnt = 0; //统计格子,脉冲次数
extern unsigned int speed;//速度
extern char signal; //主程序发速度数据的通知
char speedMes[24]; //主程序发送速度数据的字符串缓冲区void Ex0Init()
{EX0 = 1;//允许中断//EA = 1;在串口初始化函数中已经打开了总中断IT0 = 1;//外部中断的下降沿触发
}void main()
{Time0Init();//定时器0初始化UartInit();//串口相关初始化//外部中断初始化Ex0Init();Oled_Init();Oled_Clear();while(1){if(signal){//定时器1s到点,把signal置一,主程序发送速度sprintf(speedMes,"speed:%d cm/s",speed);//串口数据的字符串拼装,speed是格子,每个格子1cmSendString(speedMes);//速度发出去signal = 0;//清0speed,下次由定时器1s后的中断处理中再置一}Oled_Show_Str(2,2,speedMes);}
}void speedHandler() interrupt 0 //外部中断处理函数
{speedCnt++;//码盘转动了一个格子
}//uart.c
#include "reg52.h"
#include "motor.h"
#include "string.h"
sbit D5 = P3^7;
#define SIZE 12sfr AUXR = 0x8E;
char buffer[SIZE];void UartInit(void) //9600bps@11.0592MHz
{AUXR = 0x01;SCON = 0x50; //配置串口工作方式1,REN使能接收TMOD &= 0x0F;TMOD |= 0x20;//定时器1工作方式位8位自动重装TH1 = 0xFD;TL1 = 0xFD;//9600波特率的初值TR1 = 1;//启动定时器EA = 1;//开启总中断ES = 1;//开启串口中断
}void SendByte(char mydata)
{SBUF = mydata;while(!TI);TI = 0;
}void SendString(char *str)
{while(*str != '\0'){SendByte(*str);str++;}
}//M1qian M2 hou M3 zuo M4 you
void Uart_Handler() interrupt 4
{static int i = 0;//静态变量,被初始化一次char tmp;if(RI)//中断处理函数中,对于接收中断的响应{RI = 0;//清除接收中断标志位tmp = SBUF;if(tmp == 'M'){i = 0;}buffer[i++] = tmp;//灯控指令if(buffer[0] == 'M'){switch(buffer[1]){case '1':goForward();break;case '2':goBack();break;case '3':goLeft();break;case '4':goRight();break;default:stop();break;}}if(i == 12) {memset(buffer, '\0', SIZE);i = 0;}}}//motor.c
#include "reg52.h"sbit RightCon1A = P3^7;
sbit RightCon1B = P3^3;sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;void goForward()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 1;
}void goRight()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 0;
}void goLeft()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 1;
}void goBack()
{LeftCon1A = 1;LeftCon1B = 0;RightCon1A = 1;RightCon1B = 0;
}void stop()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 0;
}//time.c
#include "motor.h"
#include "reg52.h"extern unsigned int speedCnt;
unsigned int speed;
char signal = 0;
unsigned int cnt = 0;void Time0Init()
{//1. 配置定时器0工作模式位16位计时TMOD = 0x01;//2. 给初值,定一个0.5出来TL0=0x33;TH0=0xFE;//3. 开始计时TR0 = 1;TF0 = 0;//4. 打开定时器0中断ET0 = 1;//5. 打开总中断EAEA = 1;
}void Time0Handler() interrupt 1
{cnt++; //统计爆表的次数. cnt=1的时候,报表了1//重新给初值TL0=0x33;TH0=0xFE;if(cnt == 2000){//爆表2000次,经过了1ssignal = 1;cnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s//计算小车的速度,也就是拿到speedCnt的值speed = speedCnt;speedCnt = 0;//1秒后拿到speedCnt个格子,就能算出这1s的速度,格子清零}}//oled.c
#include "reg52.h"
#include "intrins.h"
#include "Oledfont.h"sbit scl = P1^2;
sbit sda = P1^3;void IIC_Start()
{scl = 0;sda = 1;scl = 1;_nop_();sda = 0;_nop_();
}void IIC_Stop()
{scl = 0;sda = 0;scl = 1;_nop_();sda = 1;_nop_();
}char IIC_ACK()
{char flag;sda = 1;//就在时钟脉冲9期间释放数据线_nop_();scl = 1;_nop_();flag = sda;_nop_();scl = 0;_nop_();return flag;
}void IIC_Send_Byte(char dataSend)
{int i;for(i = 0;i<8;i++){scl = 0;//scl拉低,让sda做好数据准备sda = dataSend & 0x80;//1000 0000获得dataSend的最高位,给sda_nop_();//发送数据建立时间scl = 1;//scl拉高开始发送_nop_();//数据发送时间scl = 0;//发送完毕拉低_nop_();//dataSend = dataSend << 1;}
}void Oled_Write_Cmd(char dataCmd)
{// 1. start()IIC_Start();// // 2. 写入从机地址 b0111 1000 0x78IIC_Send_Byte(0x78);// 3. ACKIIC_ACK();// 4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据IIC_Send_Byte(0x00);// 5. ACKIIC_ACK();//6. 写入指令/数据IIC_Send_Byte(dataCmd);//7. ACKIIC_ACK();//8. STOPIIC_Stop();
}void Oled_Write_Data(char dataData)
{// 1. start()IIC_Start();// // 2. 写入从机地址 b0111 1000 0x78IIC_Send_Byte(0x78);// 3. ACKIIC_ACK();// 4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据IIC_Send_Byte(0x40);// 5. ACKIIC_ACK();///6. 写入指令/数据IIC_Send_Byte(dataData);//7. ACKIIC_ACK();//8. STOPIIC_Stop();
}void Oled_Init(void){Oled_Write_Cmd(0xAE);//--display offOled_Write_Cmd(0x00);//---set low column addressOled_Write_Cmd(0x10);//---set high column addressOled_Write_Cmd(0x40);//--set start line address Oled_Write_Cmd(0xB0);//--set page addressOled_Write_Cmd(0x81); // contract controlOled_Write_Cmd(0xFF);//--128 Oled_Write_Cmd(0xA1);//set segment remap Oled_Write_Cmd(0xA6);//--normal / reverseOled_Write_Cmd(0xA8);//--set multiplex ratio(1 to 64)Oled_Write_Cmd(0x3F);//--1/32 dutyOled_Write_Cmd(0xC8);//Com scan directionOled_Write_Cmd(0xD3);//-set display offsetOled_Write_Cmd(0x00);//Oled_Write_Cmd(0xD5);//set osc divisionOled_Write_Cmd(0x80);//Oled_Write_Cmd(0xD8);//set area color mode offOled_Write_Cmd(0x05);//Oled_Write_Cmd(0xD9);//Set Pre-Charge PeriodOled_Write_Cmd(0xF1);//Oled_Write_Cmd(0xDA);//set com pin configuartionOled_Write_Cmd(0x12);//Oled_Write_Cmd(0xDB);//set VcomhOled_Write_Cmd(0x30);//Oled_Write_Cmd(0x8D);//set charge pump enableOled_Write_Cmd(0x14);//Oled_Write_Cmd(0xAF);//--turn on oled panel
}void Oled_Clear()
{unsigned char i,j; //-128 --- 127for(i=0;i<8;i++){Oled_Write_Cmd(0xB0 + i);//page0--page7//每个page从0列Oled_Write_Cmd(0x00);Oled_Write_Cmd(0x10);//0到127列,依次写入0,每写入数据,列地址自动偏移for(j = 0;j<128;j++){Oled_Write_Data(0);}}
}void Oled_Show_Char(char row,char col,char oledChar){ //row*2-2unsigned int i;Oled_Write_Cmd(0xb0+(row*2-2)); //page 0Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //high for(i=((oledChar-32)*16);i<((oledChar-32)*16+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}Oled_Write_Cmd(0xb0+(row*2-1)); //page 1Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //highfor(i=((oledChar-32)*16+8);i<((oledChar-32)*16+8+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}
}/******************************************************************************/
// 函数名称:Oled_Show_Char
// 输入参数:oledChar
// 输出参数:无
// 函数功能:OLED显示单个字符
/******************************************************************************/
void Oled_Show_Str(char row,char col,char *str){while(*str!=0){Oled_Show_Char(row,col,*str);str++;col += 8; }
}3. wifi控制测速小车
- Wifi模块-ESP-01s
- 蓝牙,ESP-01s,Zigbee, NB-Iot等通信模块都是基于AT指令的设计
AT指令介绍:
- AT指令集是从终端设备(Terminal Equipment,TE)或数据终端设备(Data Terminal Equipment,DTE)向终端适配器(Terminal Adapter,TA)或数据电路终端设备(Data Circuit Terminal Equipment,DCE)发送的。
- 其对所传输的数据包大小有定义:即对于AT指令的发送,除AT两个字符外,最多可以接收1056个 字符的长度(包括最后的空字符)。
- 每个AT命令行中只能包含一条AT指令;对于由终端设备主动向PC端报告的URC指示或者response 响应,也要求一行最多有一个,不允许上报的一行中有多条指示或者响应。AT指令以回车作为结 尾,响应或上报以回车换行为结尾。
代码实现:
//main.c
#include "motor.h"
#include "delay.h"
#include "uart.h"
#include "reg52.h"
#include "time.h"
#include "stdio.h"
#include "Oled.h"
#include "esp8266.h"sbit speedIO = P3^2;//外部中断0
unsigned int speedCnt = 0; //统计格子,脉冲次数
extern unsigned int speed;//速度
extern char signal; //主程序发速度数据的通知
char speedMes[24]; //主程序发送速度数据的字符串缓冲区
//发送数据
char FSSJ[] = "AT+CIPSEND=0,5\r\n";void Ex0Init()
{EX0 = 1;//允许中断//EA = 1;在串口初始化函数中已经打开了总中断IT0 = 1;//外部中断的下降沿触发
}void main()
{Time0Init();//定时器0初始化UartInit();//串口相关初始化Delay1000ms();//给espwifi模块上电时间initWifi_AP(); //初始化wifi工作在ap模式waitConnect(); //等待客户端的连接//外部中断初始化Ex0Init();Oled_Init();Oled_Clear();while(1){if(signal){//定时器1s到点,把signal置一,主程序发送速度SendString(FSSJ);Delay1000ms();sprintf(speedMes,"%dcms",speed);//串口数据的字符串拼装,speed是格子,每个格子1cmSendString(speedMes);//速度发出去signal = 0;//清0speed,下次由定时器1s后的中断处理中再置一}Oled_Show_Str(2,2,speedMes);}
}void speedHandler() interrupt 0 //外部中断处理函数
{speedCnt++;//码盘转动了一个格子
}//uart.c
#include "reg52.h"
#include "motor.h"
#include "string.h"
sbit D5 = P3^7;
#define SIZE 12sfr AUXR = 0x8E;
char buffer[SIZE];extern char AT_OK_Flag; //OK返回值的标志位
extern char Client_Connect_Flag;void UartInit(void) //9600bps@11.0592MHz
{AUXR = 0x01;SCON = 0x50; //配置串口工作方式1,REN使能接收TMOD &= 0x0F;TMOD |= 0x20;//定时器1工作方式位8位自动重装TH1 = 0xFD;TL1 = 0xFD;//9600波特率的初值TR1 = 1;//启动定时器EA = 1;//开启总中断ES = 1;//开启串口中断
}void SendByte(char mydata)
{SBUF = mydata;while(!TI);TI = 0;
}void SendString(char *str)
{while(*str != '\0'){SendByte(*str);str++;}
}//M1qian M2 hou M3 zuo M4 you
void Uart_Handler() interrupt 4
{static int i = 0;//静态变量,被初始化一次char tmp;if(RI)//中断处理函数中,对于接收中断的响应{RI = 0;//清除接收中断标志位tmp = SBUF;if(tmp == 'M' || tmp == 'O' || tmp == '0'){i = 0;}buffer[i++] = tmp;//连接服务器等OK返回值指令的判断if(buffer[0] == 'O' && buffer[1] == 'K'){AT_OK_Flag = 1;memset(buffer, '\0', SIZE);}if(buffer[0] == '0' && buffer[2] == 'C'){Client_Connect_Flag = 1;memset(buffer, '\0', SIZE);}//灯控指令if(buffer[0] == 'M'){switch(buffer[1]){case '1':goForward();break;case '2':goBack();break;case '3':goLeft();break;case '4':goRight();break;default:stop();break;}}if(i == 12) {memset(buffer, '\0', SIZE);i = 0;}}}//motor.c
#include "reg52.h"sbit RightCon1A = P3^7;
sbit RightCon1B = P3^3;sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;void goForward()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 1;
}void goRight()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 0;
}void goLeft()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 1;
}void goBack()
{LeftCon1A = 1;LeftCon1B = 0;RightCon1A = 1;RightCon1B = 0;
}void stop()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 0;
}//time.c
#include "motor.h"
#include "reg52.h"extern unsigned int speedCnt;
unsigned int speed;
char signal = 0;
unsigned int cnt = 0;void Time0Init()
{//1. 配置定时器0工作模式位16位计时TMOD = 0x01;//2. 给初值,定一个0.5出来TL0=0x33;TH0=0xFE;//3. 开始计时TR0 = 1;TF0 = 0;//4. 打开定时器0中断ET0 = 1;//5. 打开总中断EAEA = 1;
}void Time0Handler() interrupt 1
{cnt++; //统计爆表的次数. cnt=1的时候,报表了1//重新给初值TL0=0x33;TH0=0xFE;if(cnt == 2000){//爆表2000次,经过了1ssignal = 1;cnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s//计算小车的速度,也就是拿到speedCnt的值speed = speedCnt;speedCnt = 0;//1秒后拿到speedCnt个格子,就能算出这1s的速度,格子清零}}//oled.c
#include "reg52.h"
#include "intrins.h"
#include "Oledfont.h"sbit scl = P1^2;
sbit sda = P1^3;void IIC_Start()
{scl = 0;sda = 1;scl = 1;_nop_();sda = 0;_nop_();
}void IIC_Stop()
{scl = 0;sda = 0;scl = 1;_nop_();sda = 1;_nop_();
}char IIC_ACK()
{char flag;sda = 1;//就在时钟脉冲9期间释放数据线_nop_();scl = 1;_nop_();flag = sda;_nop_();scl = 0;_nop_();return flag;
}void IIC_Send_Byte(char dataSend)
{int i;for(i = 0;i<8;i++){scl = 0;//scl拉低,让sda做好数据准备sda = dataSend & 0x80;//1000 0000获得dataSend的最高位,给sda_nop_();//发送数据建立时间scl = 1;//scl拉高开始发送_nop_();//数据发送时间scl = 0;//发送完毕拉低_nop_();//dataSend = dataSend << 1;}
}void Oled_Write_Cmd(char dataCmd)
{// 1. start()IIC_Start();// // 2. 写入从机地址 b0111 1000 0x78IIC_Send_Byte(0x78);// 3. ACKIIC_ACK();// 4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据IIC_Send_Byte(0x00);// 5. ACKIIC_ACK();//6. 写入指令/数据IIC_Send_Byte(dataCmd);//7. ACKIIC_ACK();//8. STOPIIC_Stop();
}void Oled_Write_Data(char dataData)
{// 1. start()IIC_Start();// // 2. 写入从机地址 b0111 1000 0x78IIC_Send_Byte(0x78);// 3. ACKIIC_ACK();// 4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据IIC_Send_Byte(0x40);// 5. ACKIIC_ACK();///6. 写入指令/数据IIC_Send_Byte(dataData);//7. ACKIIC_ACK();//8. STOPIIC_Stop();
}void Oled_Init(void){Oled_Write_Cmd(0xAE);//--display offOled_Write_Cmd(0x00);//---set low column addressOled_Write_Cmd(0x10);//---set high column addressOled_Write_Cmd(0x40);//--set start line address Oled_Write_Cmd(0xB0);//--set page addressOled_Write_Cmd(0x81); // contract controlOled_Write_Cmd(0xFF);//--128 Oled_Write_Cmd(0xA1);//set segment remap Oled_Write_Cmd(0xA6);//--normal / reverseOled_Write_Cmd(0xA8);//--set multiplex ratio(1 to 64)Oled_Write_Cmd(0x3F);//--1/32 dutyOled_Write_Cmd(0xC8);//Com scan directionOled_Write_Cmd(0xD3);//-set display offsetOled_Write_Cmd(0x00);//Oled_Write_Cmd(0xD5);//set osc divisionOled_Write_Cmd(0x80);//Oled_Write_Cmd(0xD8);//set area color mode offOled_Write_Cmd(0x05);//Oled_Write_Cmd(0xD9);//Set Pre-Charge PeriodOled_Write_Cmd(0xF1);//Oled_Write_Cmd(0xDA);//set com pin configuartionOled_Write_Cmd(0x12);//Oled_Write_Cmd(0xDB);//set VcomhOled_Write_Cmd(0x30);//Oled_Write_Cmd(0x8D);//set charge pump enableOled_Write_Cmd(0x14);//Oled_Write_Cmd(0xAF);//--turn on oled panel
}void Oled_Clear()
{unsigned char i,j; //-128 --- 127for(i=0;i<8;i++){Oled_Write_Cmd(0xB0 + i);//page0--page7//每个page从0列Oled_Write_Cmd(0x00);Oled_Write_Cmd(0x10);//0到127列,依次写入0,每写入数据,列地址自动偏移for(j = 0;j<128;j++){Oled_Write_Data(0);}}
}void Oled_Show_Char(char row,char col,char oledChar){ //row*2-2unsigned int i;Oled_Write_Cmd(0xb0+(row*2-2)); //page 0Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //high for(i=((oledChar-32)*16);i<((oledChar-32)*16+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}Oled_Write_Cmd(0xb0+(row*2-1)); //page 1Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //highfor(i=((oledChar-32)*16+8);i<((oledChar-32)*16+8+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}
}/******************************************************************************/
// 函数名称:Oled_Show_Char
// 输入参数:oledChar
// 输出参数:无
// 函数功能:OLED显示单个字符
/******************************************************************************/
void Oled_Show_Str(char row,char col,char *str){while(*str!=0){Oled_Show_Char(row,col,*str);str++;col += 8; }
}//esp8266.c
#include "uart.h"//1 工作在路由模式
code char LYMO[] = "AT+CWMODE=2\r\n";
//2 使能多链接
code char DLJ[] = "AT+CIPMUX=1\r\n";
//3 建立TCPServer
code char JLFW[] = "AT+CIPSERVER=1\r\n"; // default port = 333 char AT_OK_Flag = 0; //OK返回值的标志位
char Client_Connect_Flag = 0;void initWifi_AP()
{SendString(LYMO);while(!AT_OK_Flag);AT_OK_Flag = 0;SendString(DLJ);while(!AT_OK_Flag);AT_OK_Flag = 0;
}void waitConnect()
{SendString(JLFW);while(!Client_Connect_Flag);AT_OK_Flag = 0;
}//delay.c
#include "intrins.h"void Delay1000ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 8;j = 1;k = 243;do{do{while (--k);} while (--j);} while (--i);
}4. 4g控制小车
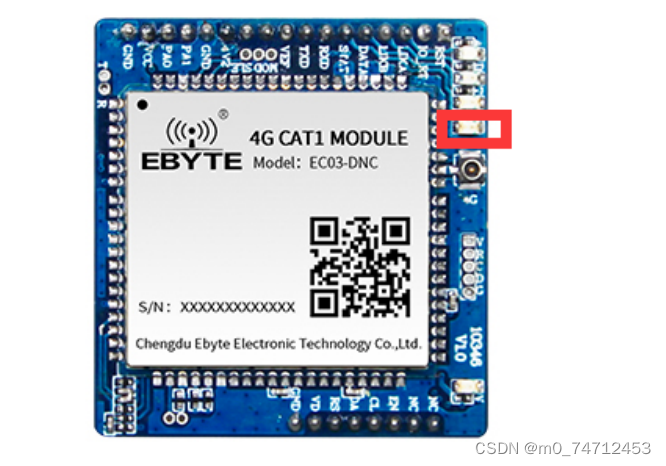
原理:运用EC03-DNC4G通信模块
模块介绍:
- 基于串口AT指令的开发方式
- 有两种工作模式,默认是透传模式,通过其他方式进入AT指令模式
- 注意插卡不要出错,下图红色位置为SIM卡状态灯,亮才是正常
代码不做修改,直接基于蓝牙小车整合, 4g模块只要做好外网透传就可以了
5. 语音控制小车
语音模块配置:
使用SU-03T / LD3320
具体介绍看我之前写过的博客:https://blog.csdn.net/m0_74712453/article/details/13171085
语音控制小车开发和调试代码
代码示例:
//main.c
#include "reg52.h"
#include "hc04.h"
#include "delay.h"
#include "sg90.h"
#include "Oled.h"
#include "motor.h"#define MIDDLE 0
#define LEFT 1
#define RIGHT 2#define BZ 1
#define XJ 2
#define GS 3sbit A25 = P1^5;
sbit A26 = P1^6;
sbit A27 = P1^7;sbit leftSensorX = P2^7;
sbit rightSensorX = P2^6;sbit leftSensorG = P2^5;
sbit rightSensorG = P2^4;char dir;double disMiddle;
double disLeft;
double disRight;void xunjiMode()
{if(leftSensorX == 0 && rightSensorX == 0){goForward();}if(leftSensorX == 1 && rightSensorX == 0){goLeft();}if(leftSensorX == 0 && rightSensorX == 1){goRight();}if(leftSensorX == 1 && rightSensorX == 1){//停stop();}
}void gensuiMode()
{if(leftSensorG == 0 && rightSensorG == 0){goForward();}if(leftSensorG == 1 && rightSensorG == 0){goRight();}if(leftSensorG == 0 && rightSensorG == 1){goLeft();}if(leftSensorG == 1 && rightSensorG == 1){//停stop();}
}void bizhangMode()
{if(dir != MIDDLE){sgMiddle();dir = MIDDLE;Delay300ms();}disMiddle = get_distance();if(disMiddle > 35){//前进goForward();}else if(disMiddle < 10){goBack();}else{//停止stop();//测左边距离sgLeft();Delay300ms();disLeft = get_distance();sgMiddle();Delay300ms();sgRight();dir = RIGHT;Delay300ms();disRight = get_distance();if(disLeft < disRight){goRight();Delay150ms();stop();}if(disRight < disLeft){goLeft();Delay150ms();stop();}}}void main()
{int mark = 0;Time0Init();Time1Init();//舵机的初始位置sgMiddle();Delay300ms();Delay300ms();dir = MIDDLE;Oled_Init();Oled_Clear();Oled_Show_Str(2,2,"-----Ready----");while(1){//满足寻迹模式的条件if(A25 == 0 && A26 == 1 && A27 == 1){if(mark != XJ){Oled_Clear();Oled_Show_Str(2,2,"-----XunJi----");}mark = XJ;xunjiMode();}//满足跟随模式的条件if(A25 == 1 && A26 == 0 && A27 == 1){if(mark != GS){Oled_Clear();Oled_Show_Str(2,2,"-----GenSui----");}mark = GS;gensuiMode();}//满足避障模式的条件if(A25 == 1 && A26 == 1 && A27 == 0){if(mark != BZ){Oled_Clear();Oled_Show_Str(2,2,"-----BiZhang----");}mark = BZ;bizhangMode();}}
}//hc04.c
#include "reg52.h"
#include "delay.h"sbit Trig = P2^3;
sbit Echo = P2^2;void Time1Init()
{ TMOD &= 0x0F; //设置定时器模式TMOD |= 0x10;TH1 = 0;TL1 = 0;//设置定时器0工作模式1,初始值设定0开始数数,不着急启动定时器
}void startHC()
{Trig = 0;Trig = 1;Delay10us();Trig = 0;
}double get_distance()
{double time;//定时器数据清零,以便下一次测距TH1 = 0;TL1 = 0;//1. Trig ,给Trig端口至少10us的高电平startHC();//2. echo由低电平跳转到高电平,表示开始发送波while(Echo == 0);//波发出去的那一下,开始启动定时器TR1 = 1;//3. 由高电平跳转回低电平,表示波回来了while(Echo == 1);//波回来的那一下,我们开始停止定时器TR1 = 0;//4. 计算出中间经过多少时间time = (TH1 * 256 + TL1)*1.085;//us为单位//5. 距离 = 速度 (340m/s)* 时间/2return (time * 0.017);
}//delay.c
#include "intrins.h"void Delay2000ms() //@11.0592MHz
{unsigned char i, j, k;i = 15;j = 2;k = 235;do{do{while (--k);} while (--j);} while (--i);
}void Delay10us() //@11.0592MHz
{unsigned char i;i = 2;while (--i);
}void Delay300ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 3;j = 26;k = 223;do{do{while (--k);} while (--j);} while (--i);
}void Delay150ms() //@11.0592MHz
{unsigned char i, j, k;i = 2;j = 13;k = 237;do{do{while (--k);} while (--j);} while (--i);
}void Delay450ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 4;j = 39;k = 209;do{do{while (--k);} while (--j);} while (--i);
}//sg90.c
#include "reg52.h"
#include "delay.h"sbit sg90_con = P1^1;int jd;
int cnt = 0;void Time0Init()
{//1. 配置定时器0工作模式位16位计时TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01;//2. 给初值,定一个0.5出来TL0=0x33;TH0=0xFE;//3. 开始计时TR0 = 1;TF0 = 0;//4. 打开定时器0中断ET0 = 1;//5. 打开总中断EAEA = 1;
}void sgMiddle()
{//中间位置jd = 3; //90度 1.5ms高电平cnt = 0;
}void sgLeft()
{//左边位置jd = 5; //135度 1.5ms高电平cnt = 0;
}void sgRight()
{//右边位置jd = 1; //0度cnt = 0;
}void Time0Handler() interrupt 1
{cnt++; //统计爆表的次数. cnt=1的时候,报表了1//重新给初值TL0=0x33;TH0=0xFE;//控制PWM波if(cnt < jd){sg90_con = 1;}else{sg90_con = 0;}if(cnt == 40){//爆表40次,经过了20mscnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1ssg90_con = 1;}}//motor.c
#include "reg52.h"sbit RightCon1A = P3^7;
sbit RightCon1B = P3^3;sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;void goForward()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 1;
}void goRight()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 0;
}void goLeft()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 1;
}void goBack()
{LeftCon1A = 1;LeftCon1B = 0;RightCon1A = 1;RightCon1B = 0;
}void stop()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 0;
}//oled.c
#include "reg52.h"
#include "intrins.h"
#include "Oledfont.h"sbit scl = P1^2;
sbit sda = P1^3;void IIC_Start()
{scl = 0;sda = 1;scl = 1;_nop_();sda = 0;_nop_();
}void IIC_Stop()
{scl = 0;sda = 0;scl = 1;_nop_();sda = 1;_nop_();
}char IIC_ACK()
{char flag;sda = 1;//就在时钟脉冲9期间释放数据线_nop_();scl = 1;_nop_();flag = sda;_nop_();scl = 0;_nop_();return flag;
}void IIC_Send_Byte(char dataSend)
{int i;for(i = 0;i<8;i++){scl = 0;//scl拉低,让sda做好数据准备sda = dataSend & 0x80;//1000 0000获得dataSend的最高位,给sda_nop_();//发送数据建立时间scl = 1;//scl拉高开始发送_nop_();//数据发送时间scl = 0;//发送完毕拉低_nop_();//dataSend = dataSend << 1;}
}void Oled_Write_Cmd(char dataCmd)
{// 1. start()IIC_Start();// // 2. 写入从机地址 b0111 1000 0x78IIC_Send_Byte(0x78);// 3. ACKIIC_ACK();// 4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据IIC_Send_Byte(0x00);// 5. ACKIIC_ACK();//6. 写入指令/数据IIC_Send_Byte(dataCmd);//7. ACKIIC_ACK();//8. STOPIIC_Stop();
}void Oled_Write_Data(char dataData)
{// 1. start()IIC_Start();// // 2. 写入从机地址 b0111 1000 0x78IIC_Send_Byte(0x78);// 3. ACKIIC_ACK();// 4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据IIC_Send_Byte(0x40);// 5. ACKIIC_ACK();///6. 写入指令/数据IIC_Send_Byte(dataData);//7. ACKIIC_ACK();//8. STOPIIC_Stop();
}void Oled_Init(void){Oled_Write_Cmd(0xAE);//--display offOled_Write_Cmd(0x00);//---set low column addressOled_Write_Cmd(0x10);//---set high column addressOled_Write_Cmd(0x40);//--set start line address Oled_Write_Cmd(0xB0);//--set page addressOled_Write_Cmd(0x81); // contract controlOled_Write_Cmd(0xFF);//--128 Oled_Write_Cmd(0xA1);//set segment remap Oled_Write_Cmd(0xA6);//--normal / reverseOled_Write_Cmd(0xA8);//--set multiplex ratio(1 to 64)Oled_Write_Cmd(0x3F);//--1/32 dutyOled_Write_Cmd(0xC8);//Com scan directionOled_Write_Cmd(0xD3);//-set display offsetOled_Write_Cmd(0x00);//Oled_Write_Cmd(0xD5);//set osc divisionOled_Write_Cmd(0x80);//Oled_Write_Cmd(0xD8);//set area color mode offOled_Write_Cmd(0x05);//Oled_Write_Cmd(0xD9);//Set Pre-Charge PeriodOled_Write_Cmd(0xF1);//Oled_Write_Cmd(0xDA);//set com pin configuartionOled_Write_Cmd(0x12);//Oled_Write_Cmd(0xDB);//set VcomhOled_Write_Cmd(0x30);//Oled_Write_Cmd(0x8D);//set charge pump enableOled_Write_Cmd(0x14);//Oled_Write_Cmd(0xAF);//--turn on oled panel
}void Oled_Clear()
{unsigned char i,j; //-128 --- 127for(i=0;i<8;i++){Oled_Write_Cmd(0xB0 + i);//page0--page7//每个page从0列Oled_Write_Cmd(0x00);Oled_Write_Cmd(0x10);//0到127列,依次写入0,每写入数据,列地址自动偏移for(j = 0;j<128;j++){Oled_Write_Data(0);}}
}void Oled_Show_Char(char row,char col,char oledChar){ //row*2-2unsigned int i;Oled_Write_Cmd(0xb0+(row*2-2)); //page 0Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //high for(i=((oledChar-32)*16);i<((oledChar-32)*16+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}Oled_Write_Cmd(0xb0+(row*2-1)); //page 1Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //highfor(i=((oledChar-32)*16+8);i<((oledChar-32)*16+8+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}
}/******************************************************************************/
// 函数名称:Oled_Show_Char
// 输入参数:oledChar
// 输出参数:无
// 函数功能:OLED显示单个字符
/******************************************************************************/
void Oled_Show_Str(char row,char col,char *str){while(*str!=0){Oled_Show_Char(row,col,*str);str++;col += 8; }
}相关文章:
智能小车之蓝牙控制并测速小车、wife控制小车、4g控制小车、语音控制小车
目录 1. 蓝牙控制小车 2. 蓝牙控制并测速小车 3. wifi控制测速小车 4. 4g控制小车 5. 语音控制小车 1. 蓝牙控制小车 使用蓝牙模块,串口透传蓝牙模块,又叫做蓝牙串口模块 串口透传技术: 透传即透明传送,是指在数据的传输过…...
指针进阶(一)
指针进阶 1. 字符指针面试题 2. 指针数组3. 数组指针3.1 数组指针的定义3.2 &数组名VS数组名 3.3 数组指针的使用4. 数组传参和指针传参4.1 一维数组传参4.2 二维数组传参4.3 一级指针传参4.4 二级指针传参 前言 指针的主题,我们在初级阶段的《指针》章节已经接…...

c# sql 判断表中是否包含指定字段
你可以使用以下方法来判断一个 SQL 数据库中的表是否包含指定的字段。 首先,你需要连接到数据库,然后执行一条 SQL 查询语句来检查表结构。你可以使用 SELECT 语句和 INFORMATION_SCHEMA.COLUMNS 系统视图来获取表中的所有列信息。 下面是一个示例代码…...

08-JVM垃圾收集器详解
上一篇:07-垃圾收集算法详解 如果说收集算法是内存回收的方法论,那么垃圾收集器就是内存回收的具体实现。 虽然我们对各个收集器进行比较,但并非为了挑选出一个最好的收集器。因为直到现在为止还没有最好的垃圾收集器出现,更加没…...
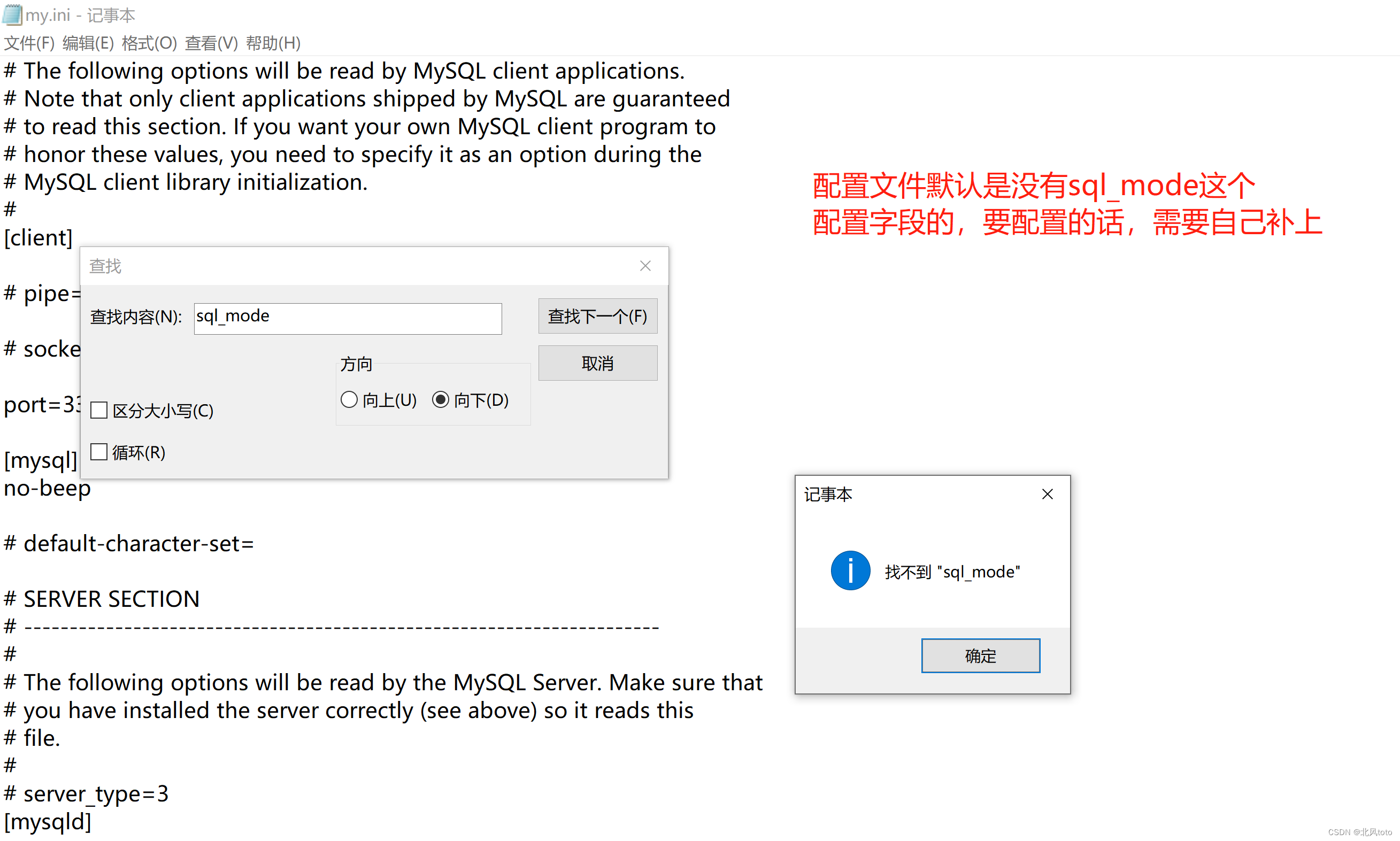
sql_mode详解
文章目录 一、sql_mode作用二、查询sql_mode三、mysql8默认的mode配置(6个默认配置)四、常见mode详细解释mysql8默认配置了的mode(6个)需要自己配置的mode(4个) 五、设置sql_mode(一旦设置了&am…...

Vue3的新特性总结
一、Vue3 里 script 的三种写法 首先,Vue3 新增了一个叫做组合式 api 的东西,英文名叫 Composition API。因此 Vue3 的 script 现在支持三种写法。 1、最基本的 Vue2 写法 <template><div>{{ count }}</div><button click"…...

【Node】Mac多版本Node切换
1、查看当前电脑是否安装node node -v或者查看当前电脑通过brew安装的node路径 ls /usr/local/Cellar/node*2、查看可安装的node brew search node3、安装其他版本node 下载需要安装的node版本 brew install node144、brew切换node版本 假设之前的版本是18,需…...

Apache POI
POI介绍 Apache POI是用Java编写的免费开源的跨平台的Java API, Apache POI提供API给Java程序对Microsoft Office格式档案读和写的功能, 其中使用最多的就是使用POI操作Excel文件。 maven坐标: <dependency><groupId>org.apa…...
个人能做股票期权吗?个人期权交易开户条件新规
个人投资者是可以交易股票期权的,不过期权交易通常需要投资者具备一定的投资经验和风险承受能力,因为期权交易涉及较高的风险和复杂性,下文为大家介绍个人能做股票期权吗?个人期权交易开户条件新规的内容。本文来自:期…...
)
Java面试整理(一)
开篇 面试,应该都是打工人需要面对的事情。我记得自己以前开始准备Java工程师面试时,都会去看那个《面试宝典》,当时这个“宝典”真的很经典,现在应该还是不少朋友会看这个。我自己经历过了找工作的面试,和企业招聘工作。所以我自己更加想从这两个不同的角度去和大家交流这…...
国家信息中心举办“数字政府建设暨数字安全技术”研讨会:海云安提出数字政府软件供应链安全解决方案
近日,由国家信息中心主办,复旦大学研究院承办的“数字政府建设暨数字安全技术研讨会”在义乌顺利召开。国家信息中心信息与网络安全部副主任禄凯,复旦大学党委常委、宣传部部长陈玉刚,义乌市委常委、常务副市长喻新贵为会议致辞。…...

uniapp 处理 分页请求
我的需求是手机上一个动态滚动列表,下拉到底部时,触发分页数据请求 uniapp上处理分页解决方案 主要看你是如何写出滚动条的。我想到的目前有三种 (1)页面滚动:直接使用onReachBottom方法,可以监听到达底部…...

最新2米分辨率北极开源DEM数据集(矢量文件)
一、项目背景 美国明尼苏达大学(University of Minnesota)的极地地理空间中心(Polar Geospatial Center, PGC)于2023年8月发布了北极数字高程模型4.1版本(ArcticDEM Mosaic 4.1)。该DEM数据集是革命性的,分辨率达到了2米,而一般的开源DEM数据集分辨率是3…...
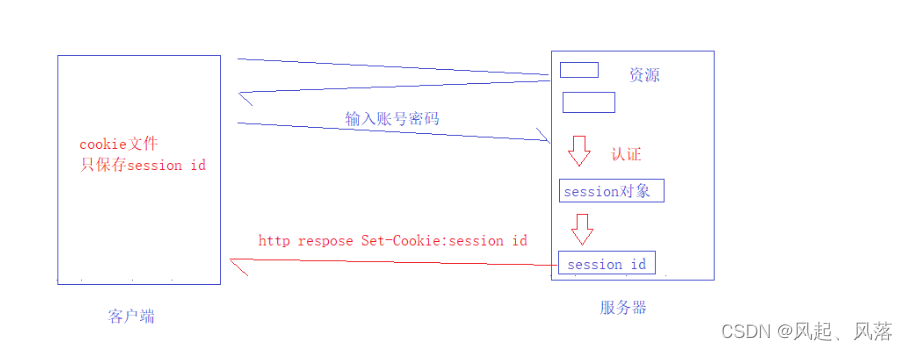
【计算机网络】HTTP(下)
本文承接上文的代码进行改造,上文链接:HTTP上 文章目录 1. 实现网站跳转实现 自己的网站跳转 2. 请求方法(get) && 响应方法(post)GET方法POST方法GET与POST的应用场景 3. HTTP状态码在自己设计的代码中发现4043开头的状态码(重定向状态码)永久…...

自学Python03-学会Python中的while循环语句
我们来学习一下怎么使用列表和字典吧! 1.列表 首先,我们来学习一下列表。列表是一个有序的集合,它可以包含任何类型的数据,比如数字、字符串或其他列表。我们可以用方括号 [] 来创建一个列表,用逗号分隔各个元素。 …...
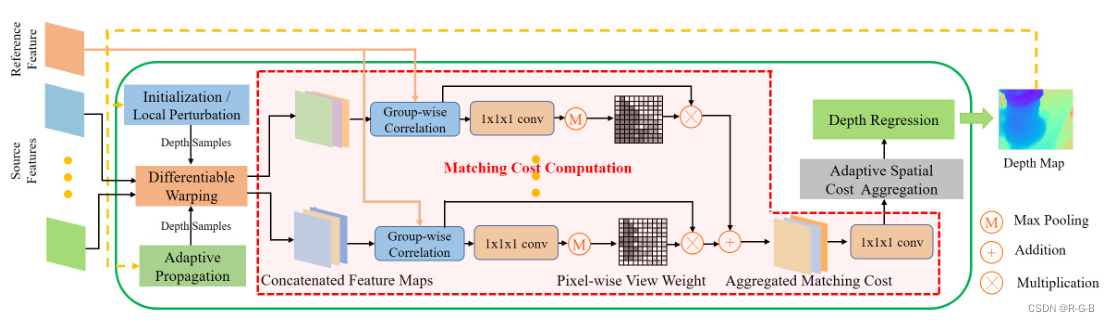
PatchMatchNet 学习笔记 译文 深度学习三维重建
9 PatchMatchNet CVPR-2021 patchmatchnet源码下载 PatchMatchNet 代码注释版 下载链接(注释非常详细,较源码结构有调整,使用起来更方便) PatchMatchNet-CVPR-2021(源码、原文+注释+译文+批注) 9.0 主要特点 金字塔,基于传统的PatchMatch算法,精度高,速度快 Pa…...
为什么要使用设计模式,以及使用设计模式的好处
在软件开发中,衡量软件质量只要包含如下指标: 正确性可维护性可读性可扩展性简洁性可测试性健壮性灵活性可复用性 然而,对于一些刚入行的新程序员来说,往往会注意不到上面这些问题,从而产生了一些让人头皮发麻的烂代…...

【Springcloud】Sentinel熔断和降级
【Springcloud】Sentinel熔断和降级 【一】基本介绍【1】什么是熔断和降级【2】为什么使用熔断和降级【3】Sentinel熔断和降级【4】核心概念 【二】下载方式【1】Windows平台安装包下载【2】打开控制台 【三】使用案例【1】添加依赖【2】添加Sentinel配置【3】添加TestUserCont…...

javascript实战开发:json数据求指定元素的和算法
项目需求 在js中,格式如: [{"name": "一(0)班-电量,一(9)班-电流,一(9)班-功率","odata": {"prev_0_day_val_diff": "10.189941,-3.0,79.0",} },{"name": "一(10)班-电量,一(10)班-…...
娱乐时间 —— 用python将图片转为excel十字绘
最近看蛮多朋友在玩,要么只能画比较简单的,要么非常花时间。想了下本质上就是把excel对应的单元格涂色,如果能知道哪些格子要上什么颜色,用编程来实现图片转为excel十字绘应该是很方便的。 图片的每一个像素点都可以数值化&#x…...

基于服务器使用 apt 安装、配置 Nginx
🧾 一、查看可安装的 Nginx 版本 首先,你可以运行以下命令查看可用版本: apt-cache madison nginx-core输出示例: nginx-core | 1.18.0-6ubuntu14.6 | http://archive.ubuntu.com/ubuntu focal-updates/main amd64 Packages ng…...
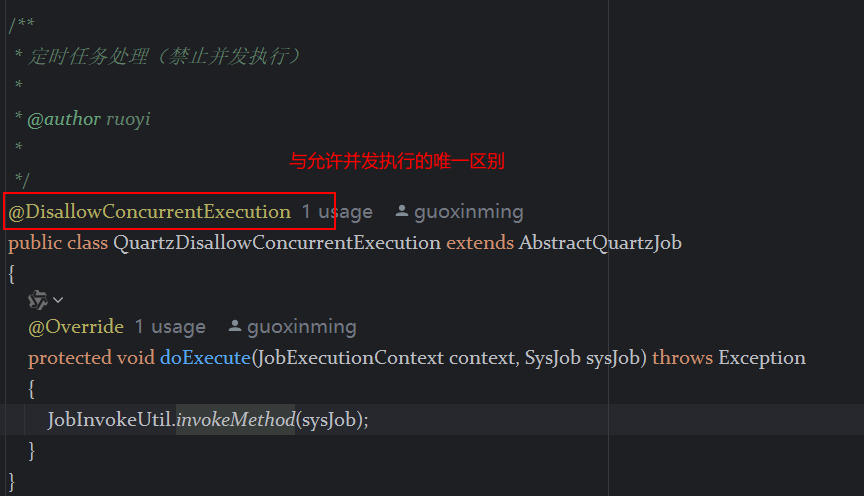
定时器任务——若依源码分析
分析util包下面的工具类schedule utils: ScheduleUtils 是若依中用于与 Quartz 框架交互的工具类,封装了定时任务的 创建、更新、暂停、删除等核心逻辑。 createScheduleJob createScheduleJob 用于将任务注册到 Quartz,先构建任务的 JobD…...
)
postgresql|数据库|只读用户的创建和删除(备忘)
CREATE USER read_only WITH PASSWORD 密码 -- 连接到xxx数据库 \c xxx -- 授予对xxx数据库的只读权限 GRANT CONNECT ON DATABASE xxx TO read_only; GRANT USAGE ON SCHEMA public TO read_only; GRANT SELECT ON ALL TABLES IN SCHEMA public TO read_only; GRANT EXECUTE O…...

WordPress插件:AI多语言写作与智能配图、免费AI模型、SEO文章生成
厌倦手动写WordPress文章?AI自动生成,效率提升10倍! 支持多语言、自动配图、定时发布,让内容创作更轻松! AI内容生成 → 不想每天写文章?AI一键生成高质量内容!多语言支持 → 跨境电商必备&am…...

Python如何给视频添加音频和字幕
在Python中,给视频添加音频和字幕可以使用电影文件处理库MoviePy和字幕处理库Subtitles。下面将详细介绍如何使用这些库来实现视频的音频和字幕添加,包括必要的代码示例和详细解释。 环境准备 在开始之前,需要安装以下Python库:…...

浅谈不同二分算法的查找情况
二分算法原理比较简单,但是实际的算法模板却有很多,这一切都源于二分查找问题中的复杂情况和二分算法的边界处理,以下是博主对一些二分算法查找的情况分析。 需要说明的是,以下二分算法都是基于有序序列为升序有序的情况…...

网络编程(UDP编程)
思维导图 UDP基础编程(单播) 1.流程图 服务器:短信的接收方 创建套接字 (socket)-----------------------------------------》有手机指定网络信息-----------------------------------------------》有号码绑定套接字 (bind)--------------…...
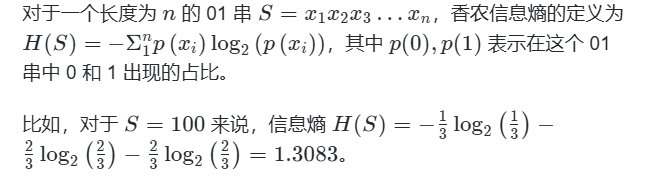
蓝桥杯3498 01串的熵
问题描述 对于一个长度为 23333333的 01 串, 如果其信息熵为 11625907.5798, 且 0 出现次数比 1 少, 那么这个 01 串中 0 出现了多少次? #include<iostream> #include<cmath> using namespace std;int n 23333333;int main() {//枚举 0 出现的次数//因…...
企业如何增强终端安全?
在数字化转型加速的今天,企业的业务运行越来越依赖于终端设备。从员工的笔记本电脑、智能手机,到工厂里的物联网设备、智能传感器,这些终端构成了企业与外部世界连接的 “神经末梢”。然而,随着远程办公的常态化和设备接入的爆炸式…...
python执行测试用例,allure报乱码且未成功生成报告
allure执行测试用例时显示乱码:‘allure’ �����ڲ����ⲿ���Ҳ���ǿ�&am…...