按键中断实验
gpio.c
#include"gpio.h"//给gpio使能和设置为输入模式void hal_gpio_init(){//使能GPIOF控制器RCC->MP_AHB4ENSETR|=(0x1<<5);//通过GPIOF_将pf9/pf7/pf8设置为输入模式 GPIOF->MODER&=(~(0x3<<18));GPIOF->MODER&=(~(0x3<<14));GPIOF->MODER&=(~(0x3<<16));}//EXTI控制器初始化void hal_exti_init(){//选择与pf9,pf7,pf8EXTI->EXTICR3&=(~(0xff<<8));EXTI->EXTICR3|=(0x5<<8);EXTI->EXTICR3&=(~(0xff<<24));EXTI->EXTICR3|=(0x5<<24);EXTI->EXTICR3&=(~(0xff<<0));EXTI->EXTICR3|=(0x5<<0);//对应事件9,7,8EXTI->FTSR1|=(0x1<<9);EXTI->FTSR1|=(0x1<<7);EXTI->FTSR1|=(0x1<<8);//不中断屏蔽EXTI->C1IMR1|=(0x1<<9);EXTI->C1IMR1|=(0x1<<7);EXTI->C1IMR1|=(0x1<<8);}//GICD控制器初始化void hal_gicd_init(){//设置CTLR给CPU0使能GICD->CTRL|=(0x1);//管理key1->99,key2->97,key3->98中断号GICD->ISENABLER[3]|=(0x1<<3);GICD->ISENABLER[3]|=(0x1<<1);GICD->ISENABLER[3]|=(0x1<<2);//设置中断优先级GICD->IPRIORITYR[24]|=(0x1<<27);GICD->IPRIORITYR[24]|=(0x1<<11);GICD->IPRIORITYR[24]|=(0x1<<19);//设置是分配给CPU0还是CPU1GICD->ITARGETSR[24]|=(0x1<<24);GICD->ITARGETSR[24]|=(0x1<<8);GICD->ITARGETSR[24]|=(0x1<<16);}//GICC控制器初始化void hal_gicc_init(){//设置CTLR给CPU0使能GICC->CTRL|=(0x1);//设置中断优先级GICC->PMR|=(0x1f<<27);}do_irq.c
#include"stm32mp1xx_gic.h" #include"stm32mp1xx_exti.h" extern void printf(const char *fmt, ...); unsigned int i = 0; void do_irq(void) { i|=GICC->IAR; if(i==99) { printf("1111111111:%d\n",i); EXTI->FPR1|=(0x1<<9); EXTI->FPR1|=(0x1<<7); EXTI->FPR1|=(0x1<<8); GICD->ICPENDR[2]|=(0X1<<3); GICD->ICPENDR[2]|=(0X1<<1); GICD->ICPENDR[2]|=(0X1<<2); GICC->EOIR|=i; } else if(i==97) { printf("11111111111:%d\n",i); EXTI->FPR1|=(0x1<<9); EXTI->FPR1|=(0x1<<7); EXTI->FPR1|=(0x1<<8); GICD->ICPENDR[2]|=(0X1<<3); GICD->ICPENDR[2]|=(0X1<<1); GICD->ICPENDR[2]|=(0X1<<2); GICC->EOIR|=i; } else if(i==98) { printf("1111111111:%d\n",i); EXTI->FPR1|=(0x1<<9); EXTI->FPR1|=(0x1<<7); EXTI->FPR1|=(0x1<<8); GICD->ICPENDR[2]|=(0X1<<3); GICD->ICPENDR[2]|=(0X1<<1); GICD->ICPENDR[2]|=(0X1<<2); GICC->EOIR|=i; } } gpio.h
#ifndef __GPIO_H__ #define __GPIO_H__ #include"stm32mp1xx_gpio.h" #include"stm32mp1xx_rcc.h" #include"stm32mp1xx_exti.h" #include"stm32mp1xx_gic.h" //给gpio使能和设置为输入模式 void hal_gpio_init(); //EXTI控制器初始化 void hal_exti_init(); //GICD控制器初始化 void hal_gicd_init(); //GICC控制器初始化 void hal_gicc_init(); #endif main.c
#include "gpio.h"
extern void printf(const char *fmt, ...);
void delay_ms(int ms)
{int i,j;for(i = 0; i < ms;i++)for (j = 0; j < 1800; j++);
} int main()
{ hal_gpio_init(); hal_exti_init(); hal_gicd_init(); hal_gicc_init(); while(1) { }return 0;
}相关文章:

按键中断实验
gpio.c#include"gpio.h"//给gpio使能和设置为输入模式void hal_gpio_init(){//使能GPIOF控制器RCC->MP_AHB4ENSETR|(0x1<<5);//通过GPIOF_将pf9/pf7/pf8设置为输入模式 GPIOF->MODER&(~(0x3<<18));GPIOF->MODER&(~(0x3<<14));GPI…...
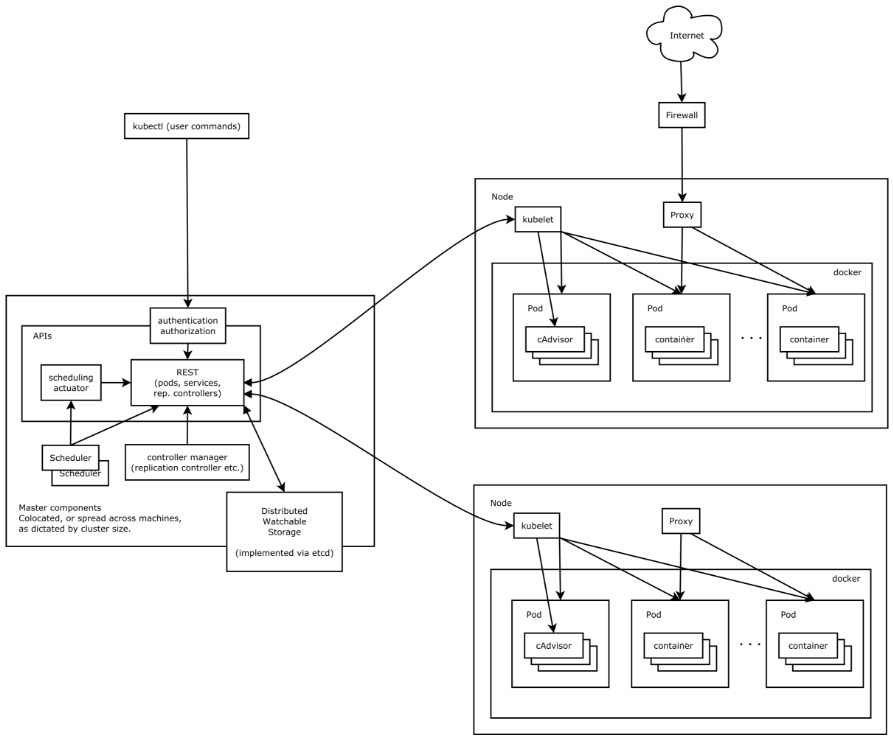
kubernetes入门介绍,从0到1搭建并使用
Kubernetes是一个容器编排系统,用于自动化应用程序部署、扩展和管理。本指南将介绍Kubernetes的基础知识,包括基本概念、安装部署和基础用法。 基础介绍 Kubernetes是Google开发的开源项目,是一个容器编排系统,可以自动化部署、…...

【C语言进阶】字符串函数与内存函数的学习与模拟实现
📝个人主页:Sherry的成长之路 🏠学习社区:Sherry的成长之路(个人社区) 📖专栏链接:C语言进阶 🎯长路漫漫浩浩,万事皆有期待 文章目录1.字符串处理函数介…...

【JavaEE初阶】第一节.多线程(进阶篇 ) 常见的锁策略、CAS及它的ABA问题
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、常见的锁策略 1.1 乐观锁 vs 悲观锁 1.2 普通的互斥锁 vs 读写锁 1.3 重量级锁 vs 轻量级锁 1.4 自旋锁 vs 挂起等待锁 1.5 公平…...

Linux基础命令-pstree树状显示进程信息
Linux基础命令-uname显示系统内核信息 Linux基础命令-lsof查看进程打开的文件 Linux基础命令-uptime查看系统负载 文章目录 前言 一 命令介绍 二 语法及参数 2.1 使用man查看命令语法 2.2 常用参数 三 参考实例 3.1 以树状图的形式显示所有进程 3.2 以树状图显示进程号…...
keepalived+LVS配置详解
keepalivedLVS配置详解keepalived简介keepalived的应用场景keepalived工作原理VRRP协议核心组件分层工作工作状态LVS简介LVS三种模式NAT模式(网络地址映射)IPTUN模式(IP隧道)DR模式(直接路由)三种模式对比keepalivedLVS配置1.master配置2. keepalived配置文件3 修改keepalived配…...

Unity之C#端使用protobuf
什么是protobuf protobuf全称Protocol Buffers,由Google推出的一种平台、语言无关的数据交互格式,目前使用最广泛的一种数据格式,尤其在网络传输过程中,有很强的安全性,而且数据量比json和xml要小很多。 最主要的是pr…...
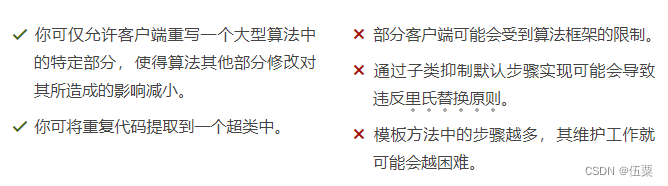
C++设计模式(18)——模板方法模式
亦称: Template Method 意图 模板方法模式是一种行为设计模式, 它在超类中定义了一个算法的框架, 允许子类在不修改结构的情况下重写算法的特定步骤。 问题 假如你正在开发一款分析公司文档的数据挖掘程序。 用户需要向程序输入各种格式…...

SQLserver 索引碎片
Oracle 不需要整理碎片,原因? 1. rowid 默认的索引是B-树索引。索引建立在表中的一个或多个列或者是表的表达式上,将列值和行编号一起存储。行编号是唯一标记表中行的伪列。 行编号是物理表中的行数据的内部地址&am…...
【Storm】【二】安装
1 准备 1.1 准备linux服务器 本文搭建的是3节点的集群,需要3台linux服务器,我这里使用的是centos7版本的linux虚拟机,虚拟机网络配置如下: 主节点: master 192.168.92.90 从节点: slave1 192.168.92.…...

Android ConditionVariable
Android ConditionVariable 线程操作经常用到wait和notify,用起来稍显繁琐,而Android给我们封装好了一个ConditionVariable类,用于线程同步。提供了三个方法block()、open()、close()。 void block() //阻塞当前线程,直到条件为…...
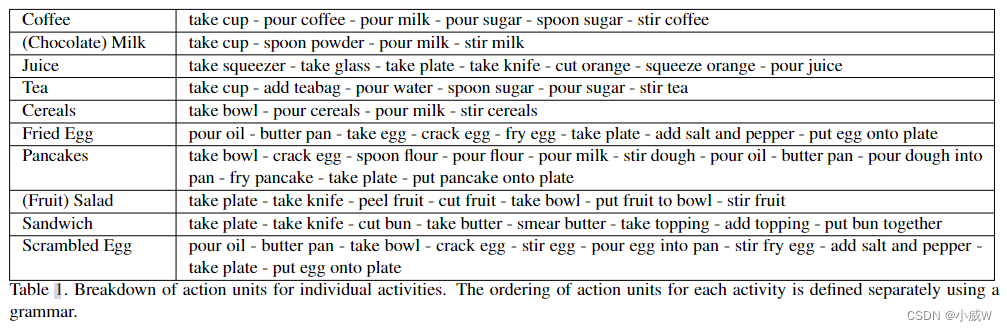
Action Segmentation数据集介绍——Breakfast
文章目录简介细节Cooking actibitiesillustration of the actions论文讲解Breakfast(The Breakfast Action Dataset)简介 早餐动作数据集包括与早餐准备相关的10个动作,由18个不同厨房的52个不同的人执行。该数据集是最大的完全带注释的数据…...
横道图时间标尺在P6软件中的设置
卷首语 由于其直观简洁且易于管理的特性,使其成为展示项目活动顺序及时间安排的最常用的进度管理工具。 甘特图 甘特图(Gantt Chart),又称为横道图或棒条图,是最早的项目进度管理工具之一。由于其直观简洁且易于管理…...
空间复杂度(超详解+例题)
全文目录引言空间复杂度例题test1test2(冒泡排序)test3(求阶乘)test4(斐波那契数列)总结引言 在上一篇文章中,我们提到判断一个算法的好坏的标准是时间复杂度与空间复杂度。 时间复杂度的作用…...

Document-Level event Extraction via human-like reading process 论文解读
Document-Level event Extraction via human-like reading process 论文:2202.03092v1.pdf (arxiv.org) 代码:无 期刊/会议:ICASSP 2022 摘要 文档级事件抽取(DEE)特别困难,因为它提出了两个挑战:论元分散和多事件。第一个挑战…...
H5盲盒抽奖系统源码
盲盒抽奖系统4.0,带推广二维码防洪炮灰功能和教程。 支持微信无限回调登录 标价就是源码价格,vuetp5框架编写,H5网页,前后端分离 此源码为正规开发,正版产品已申请软著。 开源无加密无授权,可以二开使用…...
低代码平台和无代码平台哪个更适合开发企业管理系统?
编者按:本文分析了开发企业管理系统所需要的平台特性,并根据这些特点和低代码无代码的优劣比较,得出低代码平台更适合开发企业管理系统。关键词:私有化部署,可视化设计,源码交付,数据集成&#…...

75岁彪马再发NFT 复活美洲狮IP
在“运动品牌Web3”的潮流里,彪马(PUMA)绝对算是发烧友级别。2月22日,这家德国服装品牌的新NFT又来了,总量10000个Super PUMA NFT中,将有4000个以0.15 ETH(约为255美元)价格正式公售…...

大学生成人插画培训机构盘点
成人插画培训机构哪个好,成人学插画如何选培训班?给大家梳理了国内较好的插画培训机构排名,各有优势和特色,供大家参考! 一:国内成人插画培训机构排名 1、轻微课(五颗星) 主打课程有…...
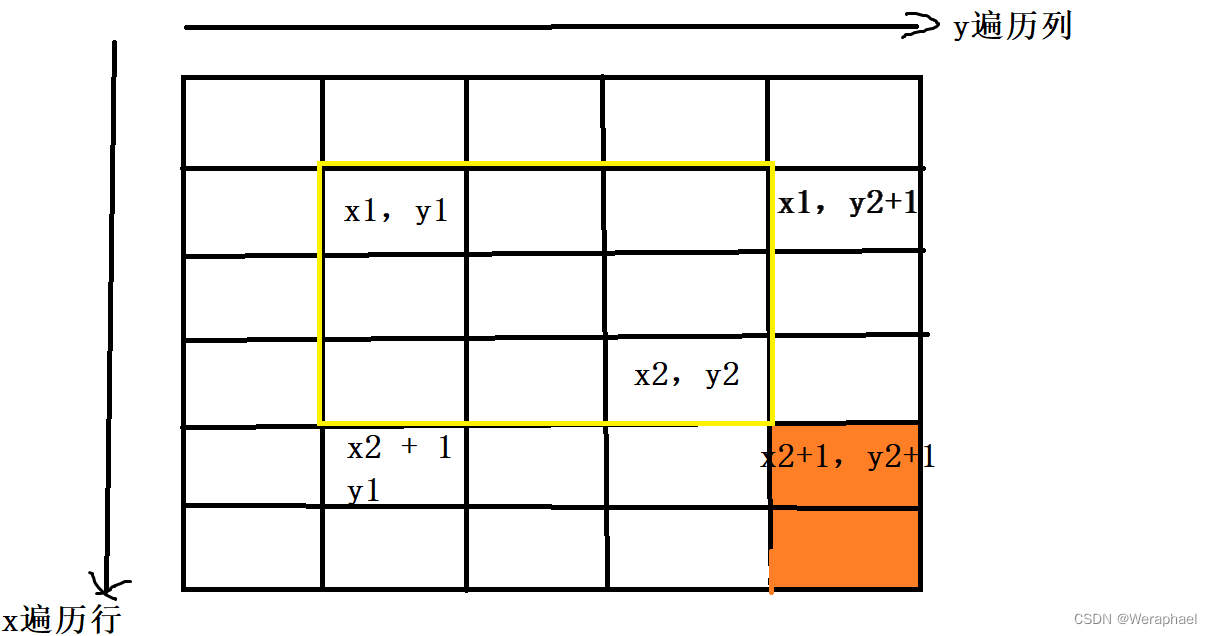
【算法基础】一维差分 + 二维差分
👦个人主页:Weraphael ✍🏻作者简介:目前正在学习c和算法 ✈️专栏:【C/C】算法 🐋 希望大家多多支持,咱一起进步!😁 如果文章有啥瑕疵 希望大佬指点一二 如果文章对你有…...

可靠性+灵活性:电力载波技术在楼宇自控中的核心价值
可靠性灵活性:电力载波技术在楼宇自控中的核心价值 在智能楼宇的自动化控制中,电力载波技术(PLC)凭借其独特的优势,正成为构建高效、稳定、灵活系统的核心解决方案。它利用现有电力线路传输数据,无需额外布…...

将对透视变换后的图像使用Otsu进行阈值化,来分离黑色和白色像素。这句话中的Otsu是什么意思?
Otsu 是一种自动阈值化方法,用于将图像分割为前景和背景。它通过最小化图像的类内方差或等价地最大化类间方差来选择最佳阈值。这种方法特别适用于图像的二值化处理,能够自动确定一个阈值,将图像中的像素分为黑色和白色两类。 Otsu 方法的原…...

什么是EULA和DPA
文章目录 EULA(End User License Agreement)DPA(Data Protection Agreement)一、定义与背景二、核心内容三、法律效力与责任四、实际应用与意义 EULA(End User License Agreement) 定义: EULA即…...
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据
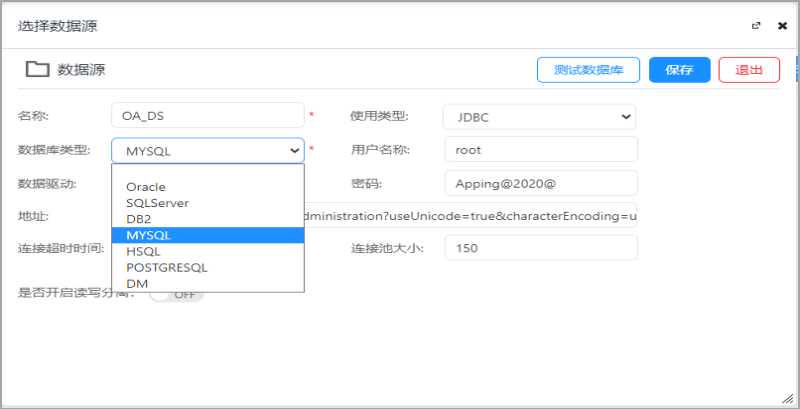
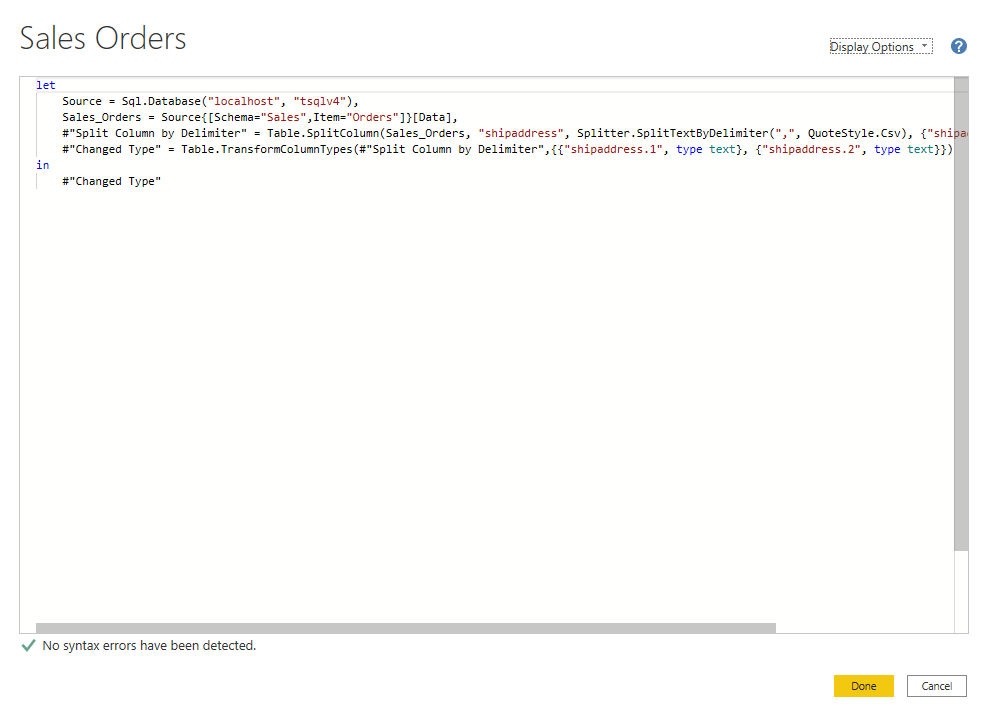
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据 Power Query 具有大量专门帮助您清理和准备数据以供分析的功能。 您将了解如何简化复杂模型、更改数据类型、重命名对象和透视数据。 您还将了解如何分析列,以便知晓哪些列包含有价值的数据,…...

C# 表达式和运算符(求值顺序)
求值顺序 表达式可以由许多嵌套的子表达式构成。子表达式的求值顺序可以使表达式的最终值发生 变化。 例如,已知表达式3*52,依照子表达式的求值顺序,有两种可能的结果,如图9-3所示。 如果乘法先执行,结果是17。如果5…...
)
【LeetCode】3309. 连接二进制表示可形成的最大数值(递归|回溯|位运算)
LeetCode 3309. 连接二进制表示可形成的最大数值(中等) 题目描述解题思路Java代码 题目描述 题目链接:LeetCode 3309. 连接二进制表示可形成的最大数值(中等) 给你一个长度为 3 的整数数组 nums。 现以某种顺序 连接…...

Web后端基础(基础知识)
BS架构:Browser/Server,浏览器/服务器架构模式。客户端只需要浏览器,应用程序的逻辑和数据都存储在服务端。 优点:维护方便缺点:体验一般 CS架构:Client/Server,客户端/服务器架构模式。需要单独…...

毫米波雷达基础理论(3D+4D)
3D、4D毫米波雷达基础知识及厂商选型 PreView : https://mp.weixin.qq.com/s/bQkju4r6med7I3TBGJI_bQ 1. FMCW毫米波雷达基础知识 主要参考博文: 一文入门汽车毫米波雷达基本原理 :https://mp.weixin.qq.com/s/_EN7A5lKcz2Eh8dLnjE19w 毫米波雷达基础…...

MySQL 主从同步异常处理
阅读原文:https://www.xiaozaoshu.top/articles/mysql-m-s-update-pk MySQL 做双主,遇到的这个错误: Could not execute Update_rows event on table ... Error_code: 1032是 MySQL 主从复制时的经典错误之一,通常表示ÿ…...

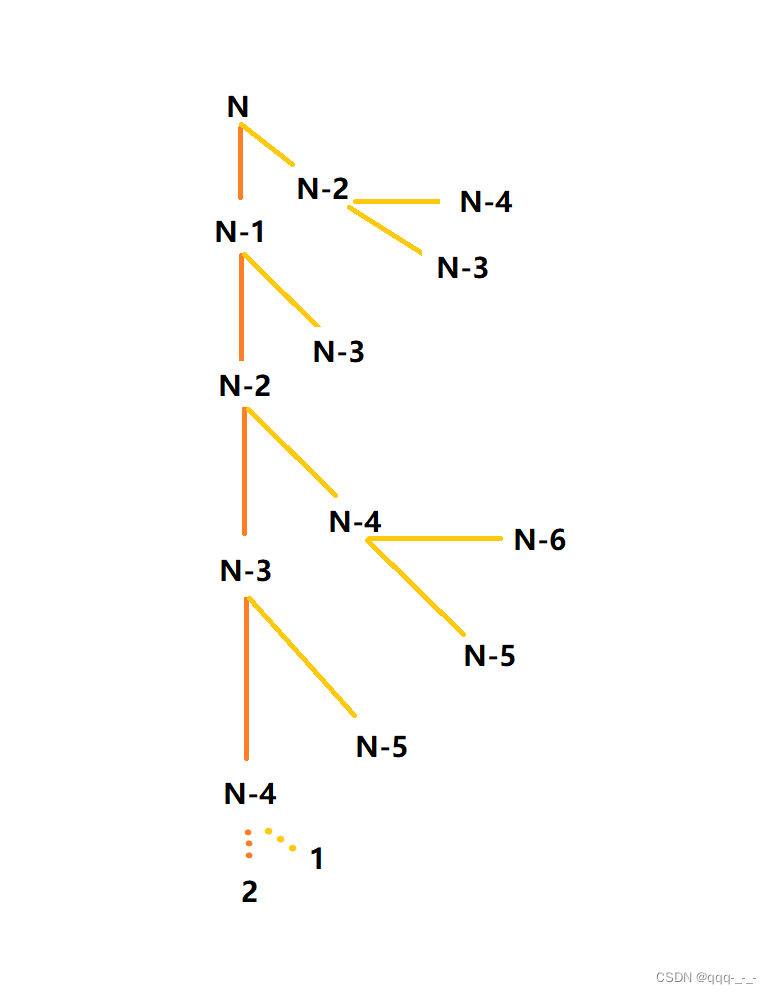
小木的算法日记-多叉树的递归/层序遍历
🌲 从二叉树到森林:一文彻底搞懂多叉树遍历的艺术 🚀 引言 你好,未来的算法大神! 在数据结构的世界里,“树”无疑是最核心、最迷人的概念之一。我们中的大多数人都是从 二叉树 开始入门的,它…...