3.基于分割的文本检测算法--DBNet++
文章目录
- 1.概况
- 2.DBNet++中的主要方法
- 2.1 网络结构
- 2.2 适应特征图融合模块(Adaptive Scale Fusion Module, ASF)
- 3.ASF模块的源码实现
- 参考资料
欢迎访问个人网络日志🌹🌹知行空间🌹🌹
1.概况
2022年02月份论文:Real-Time Scene Text Detection with Differentiable Binarization and Adaptive Scale Fusion
DBNet是2019年11月华中科技大学的Xiang Bai等提出的方法,其详细介绍见4.基于分割的文本检测算法–DBNet
DBNet++是原作者团队基于DBNet的改进工作,是DBNet会议论文的期刊版,除了DBNet中已经介绍过的可微分二值化运算之外,DBNet++中的主要创新是自适应多尺度特征融合(Adapptive Scale Fusion,ASF)模块的提出。
在以往的分割算方法中,多尺度特征图大都是通过FPN后直接进行concatenate来实现,这样做并没有考虑不同尺度特征图的重要性是不一样的。本文中,作者提出的自适应特征图融合模块使用了空间注意力机制,具体的介绍见第2部分。
2.DBNet++中的主要方法
2.1 网络结构

如上图所示,DBNet++的网络结构几乎相同,使用FPN的backbone,可微分二值化,基于分割概率图求文本区域等,主要的不同在对backbone上输出的特征图的处理上,DBNet++中新引入了Adaptive Scale Fusion模块。
2.2 适应特征图融合模块(Adaptive Scale Fusion Module, ASF)

图中对一个特征图的shape描述进行了修改,原论文图中存在特征图shape从N×C×H×W经过conv后变成C×H×W容易引起误解(容易误会成卷积将四维向量变成了三维)。
计算过程如上图所示,值的注意的是空间注意力机制的使用,先是对每个通道取均值得到特征图每个像素位置上的重要性,再将其加到原输入特征图上,增强每个位置的特征值,再通过卷积输出通道为N个的注意力权重,使得输出的权重能衡量每个尺度特征图的重要性。
backbone提取后输入到 ASF的特征图为X∈RN×C×H×W={Xi}i=0N−1X\in R^{N\times C\times H\times W} = \{X_i\}_{i=0}^{N-1}X∈RN×C×H×W={Xi}i=0N−1,N表示特征图个数,N=4
先将N个特征图 concatenate到一起,然后再经过一个3×33\times33×3的卷积层得中间特征图S∈RC×H×WS\in R^{C\times H\times W}S∈RC×H×W,将SSS输入到一个空间注意力模块得到注意力权重A∈RN×H×WA\in R^{N\times H\times W}A∈RN×H×W,注意力权重A有N个通道,将其沿通道方向切分得到N个权重矩阵[E0,E1,...,EN−1][E_0,E_1,...,E_{N-1}][E0,E1,...,EN−1],将其分别与输入的N个特征图XXX对应相乘后再 concatenate到一起就得到了 ASF的输出。
S=Conv(concat([X0,X1,...,XN−1]))S = Conv(concat([X_0,X_1,...,X_{N-1}])) S=Conv(concat([X0,X1,...,XN−1]))
A=SpatialAttention(S)A = Spatial_Attention(S) A=SpatialAttention(S)
F=concat([E0X0,E1X1,...,EN−1XN−1])F=concat([E_0X_0,E_1X_1,...,E_{N-1}X_{N-1}]) F=concat([E0X0,E1X1,...,EN−1XN−1])
3.ASF模块的源码实现
decoders/feature_attention.py
class ScaleSpatialAttention(nn.Module):def __init__(self, in_planes, out_planes, num_features, init_weight=True):super(ScaleSpatialAttention, self).__init__()self.spatial_wise = nn.Sequential(#Nx1xHxWnn.Conv2d(1, 1, 3, bias=False, padding=1),nn.ReLU(),nn.Conv2d(1, 1, 1, bias=False),nn.Sigmoid() )self.attention_wise = nn.Sequential(nn.Conv2d(in_planes, num_features, 1, bias=False),nn.Sigmoid())if init_weight:self._initialize_weights()...def forward(self, x):global_x = torch.mean(x, dim=1, keepdim=True)global_x = self.spatial_wise(global_x) + xglobal_x = self.attention_wise(global_x)return global_xclass ScaleFeatureSelection(nn.Module):def __init__(self, in_channels, inter_channels , out_features_num=4, attention_type='scale_spatial'):super(ScaleFeatureSelection, self).__init__()self.in_channels=in_channelsself.inter_channels = inter_channelsself.out_features_num = out_features_numself.conv = nn.Conv2d(in_channels, inter_channels, 3, padding=1)self.type = attention_typeif self.type == 'scale_spatial':self.enhanced_attention = ScaleSpatialAttention(inter_channels, inter_channels//4, out_features_num)elif self.type == 'scale_channel_spatial':self.enhanced_attention = ScaleChannelSpatialAttention(inter_channels, inter_channels // 4, out_features_num)elif self.type == 'scale_channel':self.enhanced_attention = ScaleChannelAttention(inter_channels, inter_channels//2, out_features_num)def _initialize_weights(self, m):classname = m.__class__.__name__if classname.find('Conv') != -1:nn.init.kaiming_normal_(m.weight.data)elif classname.find('BatchNorm') != -1:m.weight.data.fill_(1.)m.bias.data.fill_(1e-4)def forward(self, concat_x, features_list):concat_x = self.conv(concat_x)score = self.enhanced_attention(concat_x)assert len(features_list) == self.out_features_numif self.type not in ['scale_channel_spatial', 'scale_spatial']:shape = features_list[0].shape[2:]score = F.interpolate(score, size=shape, mode='bilinear')x = []for i in range(self.out_features_num):x.append(score[:, i:i+1] * features_list[i])return torch.cat(x, dim=1)
欢迎访问个人网络日志🌹🌹知行空间🌹🌹
参考资料
- 1.https://github.com/MhLiao/DB
- 2.Real-Time Scene Text Detection with Differentiable Binarization and Adaptive Scale Fusion
相关文章:
3.基于分割的文本检测算法--DBNet++
文章目录1.概况2.DBNet中的主要方法2.1 网络结构2.2 适应特征图融合模块(Adaptive Scale Fusion Module, ASF)3.ASF模块的源码实现参考资料欢迎访问个人网络日志🌹🌹知行空间🌹🌹 1.概况 2022年02月份论文:Real-Time S…...

IOS打包、SDK接入记录等
IOS打包、SDK接入记录等 Mac上安装HCLR路径 /Applications/Unity/Hub/Editor/2019.4.40f1c1/Unity.app/Contents/il2cpp HCLR 指定4.40是要Unity启动打开的il2cpp,否则HCLR Installer他会报找不到MonoBleedingEdge Mac删除证书 只能点击钥匙串做上角的登录后&…...
【C++】类与对象(引入)
目录 前言 类的引入 类的定义 封装与访问限定符 封装 访问限定符 类的实例化 类的大小 this指针 特性 前言 🎶我们都知道,C语言是面向过程的编程,而C是面向对象的编程,更多体现在编程的关注点上。 🎶就拿洗…...
Redis 高级数据类型
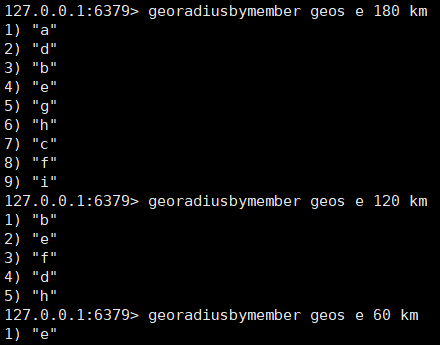
文章目录一、Bitmaps:属性状态统计二、HyperLogLog:基数统计三、GEO:地理位置信息计算提示:以下是本篇文章正文内容,Redis系列学习将会持续更新 一、Bitmaps:属性状态统计 Bitmaps类型: 统计一…...

Java8 新特性-函数式接口
什么是函数式接口 先来看看传统的创建线程是怎么写的 Thread t1 new Thread(new Runnable() {Overridepublic void run() {System.out.println("t1");} }); t1.start();再来看看使用了函数式接口是怎么写的 Thread t2 new Thread(() -> System.out.println(&…...
这套软件测试试卷能打90分,直接入职字节吧
目录 一.填空 二、 判断题(正确的√,错误的╳)共10分,每小题1分 三、数据库部分:(共15分) 四、设计题。本题共 1 小题,满分 20分 一.填空 1、 系…...
GUI可视化应用开发及Python实现
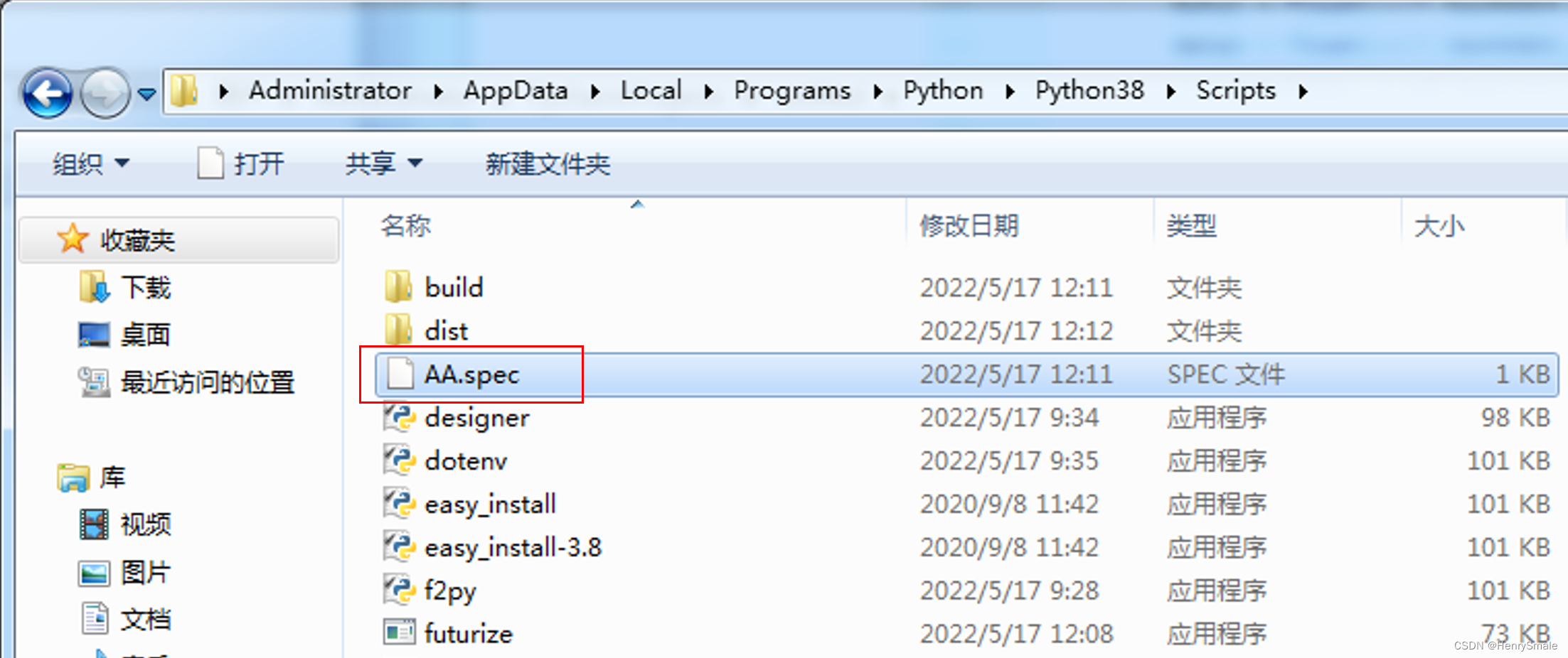
0 建议学时 4学时,在机房进行 1 开发环境安装及配置 1.1 编程环境 安装PyCharm-community-2019.3.3 安装PyQt5 pip install PyQt5-tools -i https://pypi.douban.com/simple pip3 install PyQt5designer -i https://pypi.douban.com/simple1.2 环境配置 选择“…...
【论文简述】GMFlow: Learning Optical Flow via Global Matching(CVPR 2022)
一、论文简述 1. 第一作者:Haofei Xu 2. 发表年份:2022 3. 发表期刊:CVPR oral 4. 关键词:光流、代价体、Transformers、全局匹配、注意力机制 5. 探索动机:过去几年中具有代表性的光流学习框架的核心估计方式没有…...

【Spark分布式内存计算框架——离线综合实战】5. 业务报表分析
第三章 业务报表分析 一般的系统需要使用报表来展示公司的运营情况、 数据情况等,本章节对数据进行一些常见报表的开发,广告数据业务报表数据流向图如下所示: 具体报表的需求如下: 相关报表开发说明如下: 第一、数据…...

力扣-删除重复的电子邮箱
大家好,我是空空star,本篇带大家了解一道简单的力扣sql练习题。 文章目录前言一、题目:196. 删除重复的电子邮箱二、解题1.正确示范①提交SQL运行结果2.正确示范②提交SQL运行结果3.正确示范③提交SQL运行结果4.正确示范④提交SQL运行结果5.其…...

git基础
git-note Github Manual | GitHub Cheat Sheet | Visual Git Cheat Sheet 安装配置工具分支创建仓库.gitignore文件同步更改进行更改重做提交术语表 安装 desktop.github.com | git-scm.com 配置工具 对所有本地仓库的用户信息进行配置 对你的commit操作设置关联的用户名…...
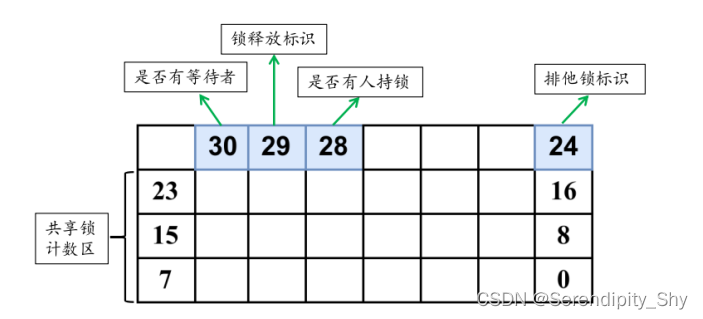
postgres 源码解析50 LWLock轻量锁--1
简介 postgres LWLock(轻量级锁)是由SpinLock实现,主要提供对共享存储器的数据结构的互斥访问。LWLock有两种锁模式,一种为排他模式,另一种是共享模式,如果想要读取共享内存中的内容,需要在读取…...

JVM优化常用命令
jps列出正在运行的虚拟机进程jpstop列出线程CPU或内存占用top top -Hp pid //列出pid全部线程jstat监视虚拟机运行状态信息jstat -gc pid 5000 //每隔5s打印gc情况jmapjmap -heap pid //输出jvm内存情况 jmap -histo:live pid | more //查看堆内存中的对象数量和大小 jma…...

按键中断实验
gpio.c#include"gpio.h"//给gpio使能和设置为输入模式void hal_gpio_init(){//使能GPIOF控制器RCC->MP_AHB4ENSETR|(0x1<<5);//通过GPIOF_将pf9/pf7/pf8设置为输入模式 GPIOF->MODER&(~(0x3<<18));GPIOF->MODER&(~(0x3<<14));GPI…...
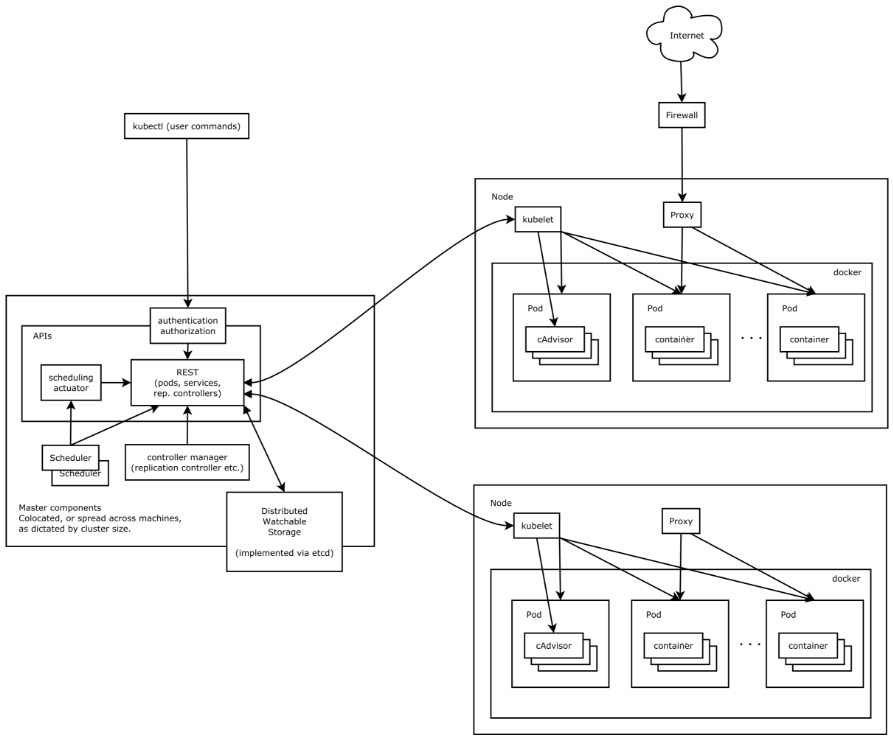
kubernetes入门介绍,从0到1搭建并使用
Kubernetes是一个容器编排系统,用于自动化应用程序部署、扩展和管理。本指南将介绍Kubernetes的基础知识,包括基本概念、安装部署和基础用法。 基础介绍 Kubernetes是Google开发的开源项目,是一个容器编排系统,可以自动化部署、…...

【C语言进阶】字符串函数与内存函数的学习与模拟实现
📝个人主页:Sherry的成长之路 🏠学习社区:Sherry的成长之路(个人社区) 📖专栏链接:C语言进阶 🎯长路漫漫浩浩,万事皆有期待 文章目录1.字符串处理函数介…...

【JavaEE初阶】第一节.多线程(进阶篇 ) 常见的锁策略、CAS及它的ABA问题
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、常见的锁策略 1.1 乐观锁 vs 悲观锁 1.2 普通的互斥锁 vs 读写锁 1.3 重量级锁 vs 轻量级锁 1.4 自旋锁 vs 挂起等待锁 1.5 公平…...

Linux基础命令-pstree树状显示进程信息
Linux基础命令-uname显示系统内核信息 Linux基础命令-lsof查看进程打开的文件 Linux基础命令-uptime查看系统负载 文章目录 前言 一 命令介绍 二 语法及参数 2.1 使用man查看命令语法 2.2 常用参数 三 参考实例 3.1 以树状图的形式显示所有进程 3.2 以树状图显示进程号…...
keepalived+LVS配置详解
keepalivedLVS配置详解keepalived简介keepalived的应用场景keepalived工作原理VRRP协议核心组件分层工作工作状态LVS简介LVS三种模式NAT模式(网络地址映射)IPTUN模式(IP隧道)DR模式(直接路由)三种模式对比keepalivedLVS配置1.master配置2. keepalived配置文件3 修改keepalived配…...

Unity之C#端使用protobuf
什么是protobuf protobuf全称Protocol Buffers,由Google推出的一种平台、语言无关的数据交互格式,目前使用最广泛的一种数据格式,尤其在网络传输过程中,有很强的安全性,而且数据量比json和xml要小很多。 最主要的是pr…...

iOS 26 携众系统重磅更新,但“苹果智能”仍与国行无缘
美国西海岸的夏天,再次被苹果点燃。一年一度的全球开发者大会 WWDC25 如期而至,这不仅是开发者的盛宴,更是全球数亿苹果用户翘首以盼的科技春晚。今年,苹果依旧为我们带来了全家桶式的系统更新,包括 iOS 26、iPadOS 26…...

CTF show Web 红包题第六弹
提示 1.不是SQL注入 2.需要找关键源码 思路 进入页面发现是一个登录框,很难让人不联想到SQL注入,但提示都说了不是SQL注入,所以就不往这方面想了 先查看一下网页源码,发现一段JavaScript代码,有一个关键类ctfs…...
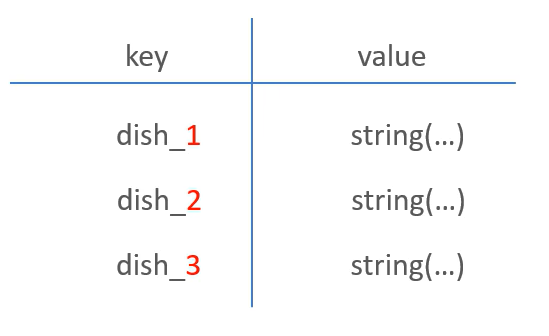
苍穹外卖--缓存菜品
1.问题说明 用户端小程序展示的菜品数据都是通过查询数据库获得,如果用户端访问量比较大,数据库访问压力随之增大 2.实现思路 通过Redis来缓存菜品数据,减少数据库查询操作。 缓存逻辑分析: ①每个分类下的菜品保持一份缓存数据…...

【JavaSE】绘图与事件入门学习笔记
-Java绘图坐标体系 坐标体系-介绍 坐标原点位于左上角,以像素为单位。 在Java坐标系中,第一个是x坐标,表示当前位置为水平方向,距离坐标原点x个像素;第二个是y坐标,表示当前位置为垂直方向,距离坐标原点y个像素。 坐标体系-像素 …...
Spring数据访问模块设计
前面我们已经完成了IoC和web模块的设计,聪明的码友立马就知道了,该到数据访问模块了,要不就这俩玩个6啊,查库势在必行,至此,它来了。 一、核心设计理念 1、痛点在哪 应用离不开数据(数据库、No…...
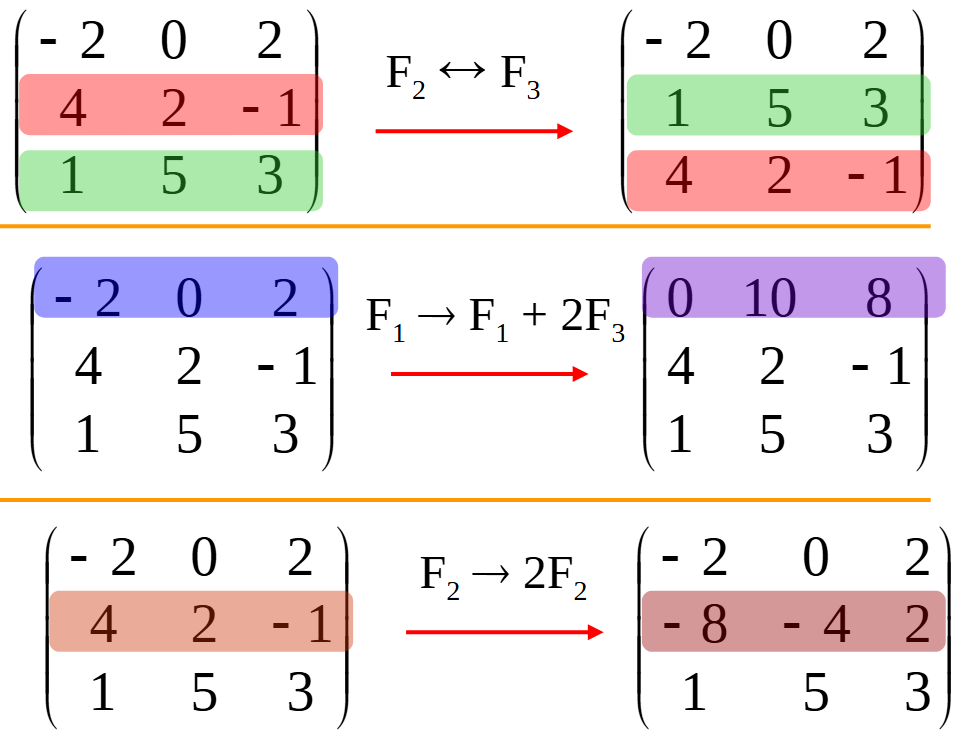
使用 SymPy 进行向量和矩阵的高级操作
在科学计算和工程领域,向量和矩阵操作是解决问题的核心技能之一。Python 的 SymPy 库提供了强大的符号计算功能,能够高效地处理向量和矩阵的各种操作。本文将深入探讨如何使用 SymPy 进行向量和矩阵的创建、合并以及维度拓展等操作,并通过具体…...
Unsafe Fileupload篇补充-木马的详细教程与木马分享(中国蚁剑方式)
在之前的皮卡丘靶场第九期Unsafe Fileupload篇中我们学习了木马的原理并且学了一个简单的木马文件 本期内容是为了更好的为大家解释木马(服务器方面的)的原理,连接,以及各种木马及连接工具的分享 文件木马:https://w…...

Mysql8 忘记密码重置,以及问题解决
1.使用免密登录 找到配置MySQL文件,我的文件路径是/etc/mysql/my.cnf,有的人的是/etc/mysql/mysql.cnf 在里最后加入 skip-grant-tables重启MySQL服务 service mysql restartShutting down MySQL… SUCCESS! Starting MySQL… SUCCESS! 重启成功 2.登…...

vulnyx Blogger writeup
信息收集 arp-scan nmap 获取userFlag 上web看看 一个默认的页面,gobuster扫一下目录 可以看到扫出的目录中得到了一个有价值的目录/wordpress,说明目标所使用的cms是wordpress,访问http://192.168.43.213/wordpress/然后查看源码能看到 这…...
零知开源——STM32F103RBT6驱动 ICM20948 九轴传感器及 vofa + 上位机可视化教程
STM32F1 本教程使用零知标准板(STM32F103RBT6)通过I2C驱动ICM20948九轴传感器,实现姿态解算,并通过串口将数据实时发送至VOFA上位机进行3D可视化。代码基于开源库修改优化,适合嵌入式及物联网开发者。在基础驱动上新增…...