2023年五一杯数学建模A题无人机定点投放问题求解全过程论文及程序
2023年五一杯数学建模
A题 无人机定点投放问题
原题再现:
随着科学技术的不断发展,无人机在许多领域都有着广泛的应用。对于空中执行定点投放任务的无人机,其投放精度不仅依赖于无人机的操作技术,而且还与无人机执行任务时所处状态和环境有关,例如在接近投放点时无人机的高度、速度,无人机所处位置的风速、投放点周围地理环境等因素。在本题中仅考虑喷气式无人机,请查阅相关资料,研究以下问题:
问题1: 假设无人机以平行于水平面的方式飞行,在空中投放物资(物资为球形,半径20cm,重量50kg)到达地面指定位置。
(1)建立数学模型,给出无人机投放距离(投放物资时无人机与地面物资指定落地点之间的直线距离)与无人机飞行高度、飞行速度、空气阻力等之间的关系。
(2)假设无人机的飞行高度为300m,飞行速度为300km/h,风速为5m/s,风向与水平面平行。建立数学模型,分别给出无人机飞行方向与风向相同(夹角为0度)、相反(夹角为180度)、垂直(夹角为90度)情况下无人机的投放距离。
问题2:无人机不仅能定点投放物资,而且还可以通过安装在无人机前端的发射筒发射爆炸物疏通河道。其大致过程是:无人机首先水平飞行接近障碍物所处区域,然后俯冲找准时机发射爆炸物,发射结束后无人机随即拉升飞走。现有一处河流被冰块堆积阻断,需要用无人机发射爆炸物(爆炸物为球形,半径8cm,重量5kg)对目标进行爆破。假设无人机的初始点到目标的水平距离为10000m。受环境影响,无人机必须俯冲发射,并且发射方向与无人机的飞行方向一致。
(1)建立数学模型,给出无人机发射距离(发射点与目标的直线距离)与无人机的飞行高度、飞行速度、俯冲角度及发射速度等因素之间的关系。
(2)假设风速为6m/s,无人机接近目标时的飞行高度为800m、飞行速度为300km/h,爆炸物的发射速度为600km/h(相对于无人机的速度)。要求发射爆炸物时无人机与目标的距离在1000 m-3000 m之间,且无人机的高度不低于300m,请给出无人机击中目标的发射策略。
问题3:无人机发射爆炸物命中目标的精度与无人机飞行的稳定性有很大关系。相同条件下,无人机发射爆炸物时越稳定,命中目标的精度越高。开始俯冲后,无人机操控员需要不断调整无人机的飞行姿态以修正风向、风速对无人机的影响。
(1)在飞行速度、发射速度一定的情况下,综合考虑各种因素,建立数学模型,量化无人机飞行的稳定性,给出稳定性与命中精度之间的关系,并利用数值仿真等方法对无人机的稳定性进行分析验证。
(2)假设风速为6m/s,无人机的飞行速度范围为300 km/h -400 km/h,爆炸物的发射速度为500km/h(相对于无人机的速度)。无人机在800m高度开始俯冲,初始俯冲角度为45°,发射爆炸物时的飞行高度不低于300m,请给出为尽量保持无人机稳定而采取的飞行姿态最优调整策略。
整体求解过程概述(摘要)
本文研究了喷气式无人机在执行空中物资投放和爆破任务过程中的数学建模问题。我们分析了无人机投放距离与飞行高度、飞行速度、空气阻力等因素之间的关系,以及无人机发射爆炸物时飞行姿态、飞行速度、发射速度等因素对命中精度的影响。本文主要包括三个问题,分别为无人机在平行于水平面飞行时投放物资的数学模型,无人机在不同风向条件下的投放距离,以及无人机在执行爆炸物疏通河道任务时的发射策略和飞行姿态最优调整策略。
在问题1中,我们建立了一个简化的数学模型,描述了无人机投放距离与飞行高度、飞行速度、空气阻力之间的关系。我们发现,投放物资的水平距离D可以通过飞行时间t和水平速度v计算得出,而飞行时间t可以通过竖直方向的加速度运动方程计算。我们将已知条件代入数学模型,分别计算了无人机在顺风、逆风和横风情况下的投放距离。
在问题2中,我们考虑了无人机在执行爆破任务时的发射策略。我们建立了一个数学模型,描述了无人机发射距离与飞行高度、飞行速度、俯冲角度及发射速度等因素之间的关系。我们通过已知条件计算出了无人机在满足一定限制条件下的发射策略,包括最佳发射角度和发射速度。
在问题3中,我们关注了无人机在发射爆炸物过程中飞行稳定性对命中精度的影响。我们建立了一个综合考虑各种因素的数学模型,量化了无人机飞行的稳定性与命中精度之间的关系,并利用数值仿真等方法对无人机的稳定性进行了分析验证。我们发现,在飞行速度、发射速度一定的情况下,通过调整无人机的飞行姿态可以显著提高命中精度。我们给出了在特定条件下为尽量保持无人机稳定而采取的飞行姿态最优调整策略。
本文的研究成果为喷气式无人机在执行空中物资投放和爆炸物疏通河道任务时提供了一种有效的数学建模方法。通过对无人机的飞行状态和环境因素的综合分析,我们为无人机在不同任务场景下的操作策略提供了理论指导。这些成果对于提高无人机在执行各种任务时的效率和安全性具有重要意义。随着科学技术的不断发展,无人机将在更多领域发挥更大的作用。通过深入研究无人机的数学建模问题,我们可以为实际应用提供更为精确和高效的指导,推动无人机技术的进一步发展和应用。
模型假设:
针对本文提出的问题,我们做了如下模型假设:
1.假设空气阻力仅对水平方向运动产生影响。
2.假设地球为平面模型,忽略重力对物体的影响。
3.假设无人机发射爆炸物时的发射方向与无人机的飞行方向一致。
4.假设无人机的飞行速度和爆炸物的发射速度不变。
5.爆炸物和物资的质量分布均匀,并且没有其他外部干扰因素影响其飞行。
6.无人机和发射筒之间的物理接触和磨损可以忽略不计。
7.爆炸物爆炸的威力可以忽略不计,对周围环境和人员不会造成实质性的影响。
问题分析:
问题一分析
问题一主要关注无人机在执行空中物资投放任务时,投放距离与飞行高度、飞行速度、空气阻力等因素之间的关系。为了解决这个问题,我们需要考虑在平行于水平面飞行时,物资从无人机投放到达地面的运动轨迹。物资受到重力和空气阻力的影响,在竖直方向上会出现加速度,而在水平方向上会受到风速的影响。因此,我们需要建立一个包含这些因素的数学模型,描述物资在空中的运动过程。
我们需要考虑物资的质量、形状和尺寸对空气阻力的影响。此外,无人机的飞行高度和速度也会影响投放距离。我们需要对这些因素进行定量分析,以便为无人机在不同风向条件下的投放任务提供指导。
问题二分析
问题二主要关注无人机在执行爆破任务时的发射策略,包括发射距离与飞行高度、飞行速度、俯冲角度及发射速度等因素之间的关系。为了解决这个问题,我们需要分析无人机在俯冲过程中,如何根据目标位置、飞行状态和环境条件来调整发射角度和速度,以保证爆炸物能够准确地命中目标。
我们需要考虑无人机在俯冲过程中受到的空气阻力和重力的影响,以及发射爆炸物时受到的反作用力。此外,我们还需要分析无人机在不同飞行姿态下的动力学特性,以便为实际操作提供指导。最后,我们需要通过数值计算和仿真方法,验证我们的模型在满足一定限制条件下的可行性和有效性。
问题三分析
问题三主要关注无人机在执行爆破任务过程中,飞行稳定性对命中精度的影响。为了解决这个问题,我们需要建立一个综合考虑各种因素的数学模型,量化无人机飞行的稳定性与命中精度之间的关系。要考虑无人机的飞行姿态、飞行速度和发射速度等因素对飞行稳定性的影响。此外,我们还需要研究风速和风向对无人机飞行稳定性的影响,以便为实际操作提供指导。在建立数学模型时,我们可以通过引入一些度量飞行稳定性的指标,如姿态角变化速度、飞行速度波动等,来描述无人机在飞行过程中的稳定性。同时,我们还需要考虑无人机在不同飞行状态下的控制策略,如姿态调整、速度调节等,以提高命中精度。
通过对无人机飞行稳定性和命中精度的关系进行分析,我们可以为实际应用提供有针对性的操作建议。我们还可以利用数值仿真等方法对无人机的飞行稳定性进行分析验证,以验证我们的模型和操作策略的有效性。
模型的建立与求解整体论文缩略图
全部论文请见下方“ 只会建模 QQ名片” 点击QQ名片即可
程序代码:
部分程序如下:
clear
clc% 遗传算法参数设置
pop_size = 100; % 种群大小
num_var = 10; % 决策变量个数
num_gen = 200; % 最大迭代次数
p_crossover = 0.8; % 交叉概率
p_mutation = 0.1; % 变异概率
ub = [500, 500, 500, 500, 500, 1000, 1000, 1000, 1000, 1000]; % 决策变量上界
lb = [0, 0, 0, 0, 0, 500, 500, 500, 500, 500]; % 决策变量下界% 目标函数
fitness_fun = @(x) -(x(6)*cos(x(7))*cos(x(8)) + x(6)*sin(x(7))*sin(x(8))*cos(x(9)) - x(5))^2 - (x(6)*sin(x(7))*cos(x(8))*cos(x(9)) - x(4))^2 - (x(6)*sin(x(8)) + x(3))^2;% 初始化种群
pop = rand(pop_size, num_var) .* (ub - lb) + lb;% 计算适应度
fitness = zeros(pop_size, 1);
for i = 1:pop_sizefitness(i) = fitness_fun(pop(i,:));
end% 迭代
for gen = 1:num_gen% 选择probs = fitness / sum(fitness);[pop_new, ~] = roulette_wheel_selection(pop, probs);% 交叉pop_new = crossover(pop_new, p_crossover);% 变异pop_new = mutation(pop_new, p_mutation, ub, lb);% 计算适应度fitness_new = zeros(pop_size, 1);for i = 1:pop_sizefitness_new(i) = fitness_fun(pop_new(i,:));end% 合并种群
clear
clc% 遗传算法参数设置
pop_size = 100; % 种群大小
num_var = 10; % 决策变量个数
num_gen = 200; % 最大迭代次数
p_crossover = 0.8; % 交叉概率
p_mutation = 0.1; % 变异概率
ub = [500, 500, 500, 500, 500, 1000, 1000, 1000, 1000, 1000]; % 决策变量上界
lb = [0, 0, 0, 0, 0, 500, 500, 500, 500, 500]; % 决策变量下界% 目标函数
fitness_fun = @(x) -(x(6)*cos(x(7))*cos(x(8)) + x(6)*sin(x(7))*sin(x(8))*cos(x(9)) - x(5))^2 - (x(6)*sin(x(7))*cos(x(8))*cos(x(9)) - x(4))^2 - (x(6)*sin(x(8)) + x(3))^2;% 初始化种群
pop = rand(pop_size, num_var) .* (ub - lb) + lb;% 计算适应度
fitness = zeros(pop_size, 1);
for i = 1:pop_sizefitness(i) = fitness_fun(pop(i,:));
end% 迭代
for gen = 1:num_gen% 选择probs = fitness / sum(fitness);[pop_new, ~] = roulette_wheel_selection(pop, probs);% 交叉pop_new = crossover(pop_new, p_crossover);% 变异pop_new = mutation(pop_new, p_mutation, ub, lb);% 计算适应度fitness_new = zeros(pop_size, 1);for i = 1:pop_sizefitness_new(i) = fitness_fun(pop_new(i,:));end% 合并种群pop_all = [pop; pop_new];fitness_all = [fitness; fitness_new];% 精英保留[~, idx] = sort(fitness_all, 'descend');pop = pop_all(idx(1:pop_size),:);fitness = fitness_all(idx(1:pop_size));% 输出结果[~, idx] = max(fitness);x_opt = pop(idx,:);fval = fitness(idx);fprintf('第%d代,最优解:', gen);disp(x_opt);fprintf('第%d代,最优目标函数值:%.4f\n', gen, -fval);
end% 选择操作
function [pop_new, idx] = roulette_wheel_selection(pop, probs)[N, ~] = size(pop);cum_probs = cumsum(probs);pop_new = zeros(N, size(pop,2));for i = 1:Nr = rand();idx = find(cum_probs > r, 1);pop_new(i,:) = pop(idx,:);end
end% 交叉
function pop_new = crossover(pop, pc)
[N, n_var] = size(pop);
pop_new = zeros(N, n_var);
for i = 1:N/2
p1 = pop(2i-1, :);
p2 = pop(2i, :);
r = rand();
if r < pc
% 单点交叉
c_point = randi([1, n_var-1]);
pop_new(2i-1, :) = [p1(1:c_point), p2(c_point+1:end)];
pop_new(2i, :) = [p2(1:c_point), p1(c_point+1:end)];
else
pop_new(2i-1, :) = p1;
pop_new(2i, :) = p2;
end
end
end% 确保个体数量为偶数
if mod(N, 2) ~= 0pop = pop(1:end-1,:);
end% 交叉
pop_new = zeros(size(pop));
for i = 1:2:Np1 = pop(i, :);p2 = pop(i+1, :);if rand() < p_crossover% 两点交叉c = randi(size(pop, 2) - 1);pop_new(i,:) = [p1(1:c), p2(c+1:end)];pop_new(i+1,:) = [p2(1:c), p1(c+1:end)];else% 不交叉pop_new(i,:) = p1;pop_new(i+1,:) = p2;end
end% 变异
function pop_new = mutation(pop, pm, lb, ub)
[N, n_var] = size(pop);
pop_new = zeros(N, n_var);
for i = 1:N
p = pop(i, :);
r = rand();
if r < pm
% 随机变异
idx = randi(n_var);
p_new = p;
p_new(idx) = lb(idx) + (ub(idx)-lb(idx)) * rand();
pop_new(i, :) = p_new;
else
pop_new(i, :) = p;
end
end
end
全部论文请见下方“ 只会建模 QQ名片” 点击QQ名片即可
相关文章:
2023年五一杯数学建模A题无人机定点投放问题求解全过程论文及程序
2023年五一杯数学建模 A题 无人机定点投放问题 原题再现: 随着科学技术的不断发展,无人机在许多领域都有着广泛的应用。对于空中执行定点投放任务的无人机,其投放精度不仅依赖于无人机的操作技术,而且还与无人机执行任务时所处状…...
Redis 7 第九讲 微服务集成Redis 应用篇
Jedis 理论 Jedis是redis的java版本的客户端实现,使用Jedis提供的Java API对Redis进行操作,是Redis官方推崇的方式;并且,使用Jedis提供的对Redis的支持也最为灵活、全面;不足之处,就是编码复杂度较高。 …...

c++day7
仿照vector手动实现自己的myVector,最主要实现二倍扩容功能 #include <iostream>using namespace std; template <typename T> class Myvector { private:T *start;//起始指针T *end;//数组末尾指针T *last;//数组有效长度的尾指针 public://定义无参构…...

C++学习概述
1.c 为啥需要头文件 如果您刚开始使用 C,您可能想知道为什么C需要 #include 头文件,以及为什么一个程序要拥有多个 .cpp 文件。 原因很简单: a) 减少编译时间 随着程序的增长,您的代码也会增长,如果所有内容都在一个…...

关系型数据库和非关系型数据库
关系型数据库和非关系型数据库 关系型数据库非关系型数据库 非关系型数据库和关系型数据库是两种不同类型的数据库管理系统,它们用于存储和管理数据,但在数据组织和处理方式上有一些重要的区别。 关系型数据库 1.结构化数据存储:关系型数据库…...
基于SSM的快餐店点餐服务系统设计与实现
末尾获取源码 开发语言:Java Java开发工具:JDK1.8 后端框架:SSM 前端:采用JSP技术开发 数据库:MySQL5.7和Navicat管理工具结合 服务器:Tomcat8.5 开发软件:IDEA / Eclipse 是否Maven项目&#x…...

使用vcpkg配置CGAL+visual studio 2022
先安装vcpkg C:\dev> git clone https://github.com/microsoft/vcpkg C:\dev> cd vcpkg C:\dev\vcpkg> .\bootstrap-vcpkg.bat 运行后,先执行 C:\dev\vcpkg> .\vcpkg.exe install yasm-tool:x86-windows 这是因为gmp库中有个bug,只能这样…...
【Spring面试】三、Bean的配置、线程安全、自动装配
文章目录 Q1、什么是Spring Bean?和对象有什么区别Q2、配置Bean有哪几种方式?Q3、Spring支持的Bean有哪几种作用域?Q4、单例Bean的优势是什么?Q5、Spring的Bean是线程安全的吗?Q6、Spring如何处理线程并发问题…...

flink连接kafka报:org.apache.kafka.common.errors.TimeoutException
测试flink1.12.7 连接kafka: package org.test.flink;import org.apache.flink.api.common.serialization.SimpleStringSchema; import org.apache.flink.streaming.api.datastream.DataStream; import org.apache.flink.streaming.api.environment.StreamExecutio…...

sql order by 排序 null值放最后,怎么写
在 SQL 中,可以使用 ORDER BY 子句对结果进行排序。如果要将 NULL 值放在最后,可以在排序列中使用 CASE 表达式来处理。 下面是一个示例查询,将 NULL 值放在最后进行排序: SELECT column1, column2 FROM your_table ORDER BY CAS…...
HDMI字符显示实验
FPGA教程学习 第十五章 HDMI字符显示实验 文章目录 FPGA教程学习前言实验原理程序设计像素点坐标模块字符叠加模块 实验结果知识点总结 前言 在HDMI输出彩条的基础上输出osd叠加信息。 实验原理 实验通过字符转换工具将字符转换为 16 进制 coe 文件存放到单端口的 ROM IP 核…...

Spring Cloud 框架搭建
Spring Cloud 框架搭建之一基础框架 创建父项目创建子项目 创建父项目 第一步:新建项目,填写基础信息 第二步:这里不需要其他组件直接点next即可。 第三步:pom文件添加下述代码,将父项目设置为pom文件形式打包&#…...

20个非常有用的单行Python代码片段
1. 写在前面 继上篇,继续在本文分享 20 个 Python 单行代码,可以在 30 秒或更短时间内轻松学会。这些单行代码不仅可以提高效率,同时使代码看起来更整洁、更易读。:) 个人博客: https://jianpengzhang.git…...

【LangChain系列 9】Prompt模版——MessagePromptTemplate
原文地址:【LangChain系列 9】Prompt模版——MessagePromptTemplate 本文速读: MessagePromptTemplate MessagesPlaceholder 在对话模型(chat model) 中, prompt主要是封装在Message中,LangChain提供了一些MessagePromptTemplat…...

ROS2的学习路径
学习ROS2的建议学习路径: 理解基础知识: 熟悉机器人操作系统(ROS)的概念及其架构。了解ROS2相对于ROS1的优势以及其提供的关键功能。 安装和配置: 在你选择的操作系统上安装ROS2(如Ubuntu、Windows、macOS…...

Maintaining leader role through timed lease mechanism
Continuous understanding of distributed systems design On the one hand 基于定时的租约机制来保持leader角色 基于定时的租约机制来保持leader角色的设计思想是一种在分布式系统中确保高可用性和系统一致性的解决方法。 在分布式系统中,通常会有一个角色被选举…...
Mysql InnoDB引擎 的hash索引
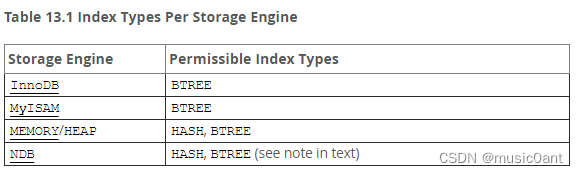
Mysql InnoDB引擎不支持hash索引,但是在内存结构中有一个自适应hash索引,来提高查询性能 当设置hash索引时会自动转换成btree索引 查一下mysql官方文档:https://dev.mysql.com/doc/refman/5.7/en/create-index.html innodb_adaptive_hash_i…...

23年PMP考试如何备考?
接下来我要分享的备考建议分为三个部分,考试相关、备考期间注意和刷题建议。 1、PMP考试相关 PMP考试时间一定不能忘记,要密切关注,或许会出现延期的情况。考试教材现在是第七版教材,建议买一本或者用pdf电子版打印出来…...
)
mysql数据库增量备份方案、备份计划(InsCode AI 创作助手)
一、备份计划 以下是MySQL数据库增量备份的一般计划: 创建完整备份:在自动备份计划开始前,先创建一次完整备份。这个备份将包含所有数据和表结构。保存增量备份:在每次备份计划完成后,保存增量备份。这个备份将包含从…...
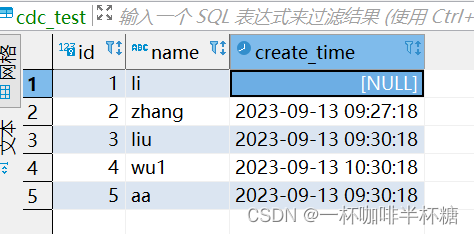
【Flink】FlinkCDC获取mysql数据时间类型差8小时时区解决方案
1、背景: 在我们使用FlinkCDC采集mysql数据的时候,日期类型是我们很常见的类型,但是FlinkCDC读取出来会和数据库的日期时间不一致,情况如下 FlinkCDC获取的数据中create_time字段1694597238000转换为时间戳2023-09-13 17:27:18 而数据库中原始数据如下,并没有到下午5点…...

Setuptools vs Distutils:为什么它是Python构建系统的首选
Setuptools vs Distutils:为什么它是Python构建系统的首选 【免费下载链接】setuptools Official project repository for the Setuptools build system 项目地址: https://gitcode.com/gh_mirrors/se/setuptools Setuptools 是 Python 生态中广泛使用的构建…...
PyCaret数据转换:Box-Cox与Yeo-Johnson变换
PyCaret数据转换:Box-Cox与Yeo-Johnson变换 【免费下载链接】pycaret An open-source, low-code machine learning library in Python 项目地址: https://gitcode.com/gh_mirrors/py/pycaret PyCaret是一个开源的低代码机器学习库,提供了简单高效…...
PyCaret革命:用低代码机器学习库彻底改变Python数据分析流程
PyCaret革命:用低代码机器学习库彻底改变Python数据分析流程 【免费下载链接】pycaret An open-source, low-code machine learning library in Python 项目地址: https://gitcode.com/gh_mirrors/py/pycaret PyCaret是一个开源的低代码机器学习库࿰…...

DASD-4B-Thinking与STM32集成:边缘AI设备开发实战
DASD-4B-Thinking与STM32集成:边缘AI设备开发实战 1. 引言 想象一下,一个只有硬币大小的设备,却能理解你的语音指令、分析传感器数据并做出智能决策。这就是边缘AI的魅力所在。随着AI模型越来越轻量化,我们现在可以将原本需要强…...

高效特征工程:使用NumPy优化CCMusic音频处理流程
高效特征工程:使用NumPy优化CCMusic音频处理流程 1. 引言 音频数据处理在音乐信息检索领域一直是个计算密集型任务。特别是处理像CCMusic这样包含1700多首音乐片段的数据集时,传统的循环处理方法往往效率低下,耗时长且资源占用大。 今天我…...

LabVIEW 双通道示波器:从源码到综合分析的奇妙之旅
labview 双通道示波器源码,电压及时间测量,频谱分析,在电子测量与信号分析的领域,LabVIEW 以其图形化编程的便捷性和强大功能,成为众多工程师和爱好者的得力工具。今天咱就来唠唠 LabVIEW 双通道示波器源码,…...

柔性温度传感器--折线型结构
型号B型标称阻值(0℃,Ω)测量栅区域尺寸(mm)基材尺寸(mm)镂空尺寸 (mm)备注结构图形LGWGLMWMLKWKNBF100-75B*L※※NBG100-75B*L※※100757880804040说明:*:引出线根数2&a…...

实用代码、链接、工具汇总
学习资料推荐网站 https://www.code-nav.cn/ https://www.r2coding.com/ https://www.c114.com.cn/ https://juejin.cn/ https://www.fromgeek.com/about/index.html https://www.xygalaxy.com/ freertos: https://www.freertos.org/zh-cn-cmn-s/Documentation/01-FreeRTOS-qu…...

终极wysihtml5性能优化指南:提升编辑器响应速度的10个高效方法
终极wysihtml5性能优化指南:提升编辑器响应速度的10个高效方法 【免费下载链接】wysihtml5 项目地址: https://gitcode.com/gh_mirrors/wys/wysihtml5 wysihtml5是一款轻量级的富文本编辑器,在网页应用中被广泛使用。然而,随着内容复…...

为什么选择GDAL?开源地理空间库的优势与应用场景
为什么选择GDAL?开源地理空间库的优势与应用场景 【免费下载链接】gdal GDAL is an open source MIT licensed translator library for raster and vector geospatial data formats. 项目地址: https://gitcode.com/gh_mirrors/gd/gdal GDAL(Geos…...