MCU软核 3. Xilinx Artix7上运行cortex-m3软核
0. 环境
- win10 + vivado 2018.3 + keil mdk
- jlink
- XC7A35TV12
1. 下载资料
https://keilpack.azureedge.net/pack/Keil.V2M-MPS2_DSx_BSP.1.1.0.pack
https://gitee.com/whik/cortex_m3_on_xc7a100t
2. vivado 2018
Create Project -> Next ->
-> Project name: cortex_m3
-> Project location: E:/Workspaces/vivado2018/XC7A35TV12/
-> 取消勾选 Create project subdirectory
-> RTL Project
-> Next -> Next
-> xc7a35tftg256-1
-> finish
创建Block Design
点击IP INTEGRATOR下的 Create Block Design -> Design name: cm3_core -> OK
2.1 添加m3 ip核
把
mcu designstart cortex-m3\cortex_m3_on_xc7a100t-main\cm3_core
拷贝到
E:\Workspaces\vivado2018\XC7A35TV12\cortex_m3\cm3_core

-> 点击PROJECT MANAGER下的Settings -> IP -> Repository -> Add -> E:\Workspaces\vivado2018\XC7A35TV12\cortex_m3\cm3_core
-> Apply -> OK
添加Cortex-M3
点击Diagram下的+ -> 筛选并双击Cortex-M3 -> 双击新建的实例CORTEXM3_AXI_0 ->
-> Debug -> Trace Level: 0 = No trace -> 取消勾选 JTAG Port Present
-> Instruction Memory -> ITCM Size: 64kB -> 取消勾选 Initialise ITCM
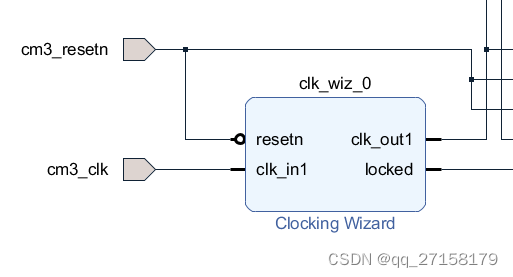
2.2 Clocking Wizard
点击Diagram下的+ -> 筛选并双击Clocking Wizard -> 双击新建的实例 clk_wiz_0 ->
-> Clocking Options -> Primary 50MHz ->
-> Output Clocks -> clk_out1: 50MHz ->
-> Reset Type: Active Low
-> OK
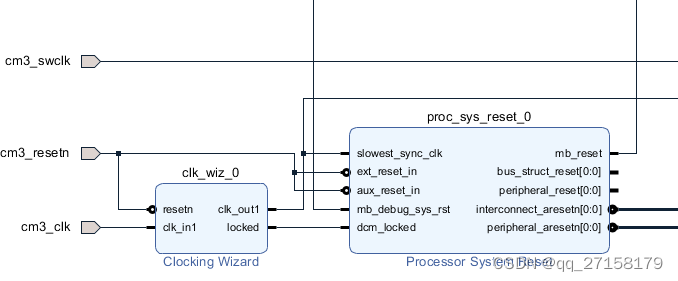
2.3 复位
点击Diagram下的+ -> 筛选并双击Processor System Reset -> OK
点击Diagram下的+ -> 筛选并双击 Utility Vector Logic -> 双击新建的实例 util_vector_logic_0 ->
-> C_SIZE: 1 -> not -> OK
2.4 AXI
点击Diagram下的+ -> 筛选并双击 AXI Interconnect -> OK
File -> Add Sources -> Add or create design sources -> Next
-> Create File -> swdiobuf -> OK
-> Finish
2.5 SWD调试口
修改swdiobuf.v
添加以下内容:
module swdiobuf(input swd_o,output swd_i,input swd_oe,inout swd_io);IOBUF swd_iobuf_inst1(.O(swd_i),.I(swd_o),.IO(swd_io),.T(~swd_oe) //);endmoduleSources -> Design Sources -> -> 右键选择swdiobuf -> Add Module to Block Design
连线
CORTEXM3_AXI_0 swdiobuf_0
SWDO swd_o
SWDOEN swd_oe
SWDITMS swd_i
右键swd_io -> Make External -> 改名为 cm3_swdio
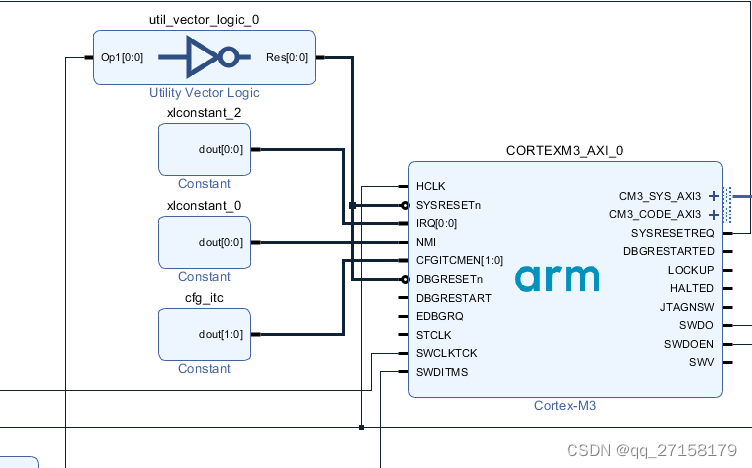
2.6 cortex-m3的接口配置
点击Diagram下的+ -> 筛选并双击 Constant -> 双击新建的实例 xlconstant_0 -> Const Width: 1 -> ConstVal: 0 -> OK -> 输出连线 NMI
点击Diagram下的+ -> 筛选并双击 Constant -> 双击新建的实例 xlconstant_1 -> Const Width: 2 -> ConstVal: 1 -> OK -> 改名为 cfg_itc -> 输出连线 CFGITCMEN
点击Diagram下的+ -> 筛选并双击 Constant -> 双击新建的实例 xlconstant_2 -> Const Width: 1 -> ConstVal: 1 -> OK -> 改名为 cfg_itc -> 输出连线 IRQ
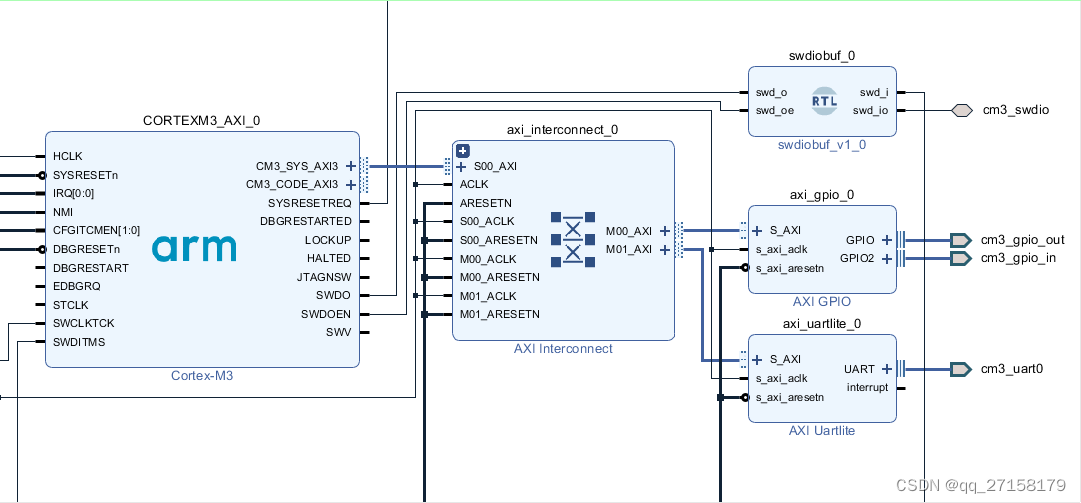
2.7 外设
点击Diagram下的+ -> 筛选并双击 AXI GPIO -> 双击新建的实例 axi_gpio_0 ->
-> GPIO -> 勾选All Outputs -> GPIO Width: 4
-> 勾选 Enable Dual Channel
-> GPIO 2 -> 勾选All Inputs -> GPIO Width: 4
-> OK
点击Diagram下的+ -> 筛选并双击 AXI Uartlite -> 双击新建的实例 axi_uartlite_0 ->
-> Baud Rate: 115200
-> OK
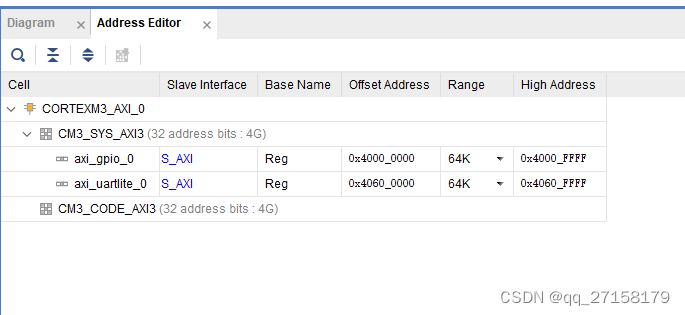
2.8 分配外设基地址
Address Editor -> Auto Assign Address
2.9 验证
右键空白处 -> Validate Design
2.10 封装
点击 IP INTEGRATOR下的 Generate Block Design -> global -> Generate
Sources -> 右键 microblaze_core -> Create HDL wrapper -> Copy generated wrapper to allow user edits -> OK
2.11 封装 top
Sources -> Add Sources -> -> 右键选择 s wdiobuf -> Add Module to Block Design
File -> Add Sources -> Add or create design sources -> Next
-> Create File -> top_hdl -> OK
-> Finish
module top_hdl(//Inputsinput clk,input rst_n,input swclk,input uart_rxd,input [3:0] sw,//Outputsoutput [3:0] led,output uart_txd,//Inoutsinout swdio
);cm3_core_wrapper cm3_core_wrapper_ut0(//Inputs.cm3_clk(clk),.cm3_resetn(rst_n),.cm3_gpio_in_tri_i(sw[3:0]),.cm3_swclk(swclk),.cm3_uart0_rxd(uart_rxd),//Outputs.cm3_gpio_out_tri_o(led[3:0]),.cm3_uart0_txd(uart_txd),//Inouts.cm3_swdio(swdio)
);endmodule //top_hdl end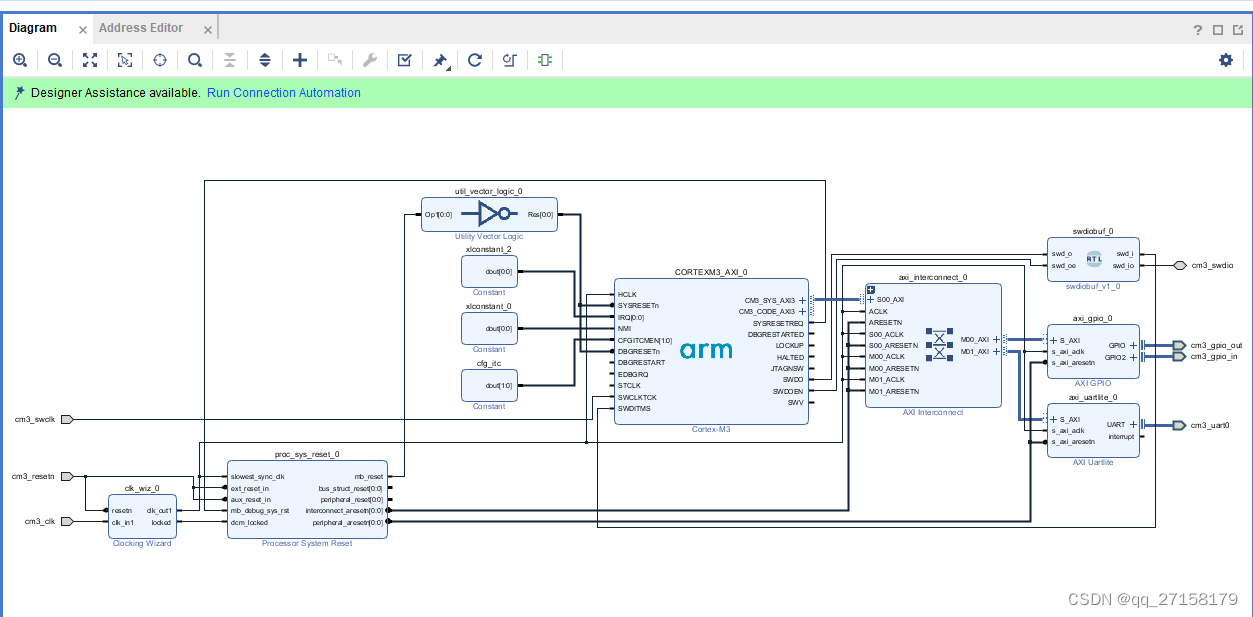
2.12 编译
RTL ANALYSIS -> Schematic
-> I/O Ports
-> save... -> cortex_m3.xdc
2.13 修改约束文件 cortex_m3.xdc
set_property PACKAGE_PIN D4 [get_ports clk_50m]
set_property IOSTANDARD LVCMOS33 [get_ports clk_50m]set_property PACKAGE_PIN C4 [get_ports rst_n]
set_property IOSTANDARD LVCMOS33 [get_ports rst_n]set_property PACKAGE_PIN K12 [get_ports {led[0]}]
set_property IOSTANDARD LVCMOS33 [get_ports {led[0]}]set_property PACKAGE_PIN L14 [get_ports {led[1]}]
set_property IOSTANDARD LVCMOS33 [get_ports {led[1]}]set_property PACKAGE_PIN L13 [get_ports {led[2]}]
set_property IOSTANDARD LVCMOS33 [get_ports {led[2]}]set_property PACKAGE_PIN M14 [get_ports {led[3]}]
set_property IOSTANDARD LVCMOS33 [get_ports {led[3]}]set_property PACKAGE_PIN D11 [get_ports {key[0]}]
set_property IOSTANDARD SSTL15 [get_ports {key[0]}]set_property PACKAGE_PIN G11 [get_ports {key[1]}]
set_property IOSTANDARD SSTL15 [get_ports {key[1]}]set_property PACKAGE_PIN H11 [get_ports {key[2]}]
set_property IOSTANDARD SSTL15 [get_ports {key[2]}]set_property PACKAGE_PIN K13 [get_ports {key[3]}]
set_property IOSTANDARD LVCMOS33 [get_ports {key[3]}]set_property PACKAGE_PIN E6 [get_ports uart_txd]
set_property IOSTANDARD LVCMOS33 [get_ports uart_txd]set_property PACKAGE_PIN C7 [get_ports uart_rxd]
set_property IOSTANDARD LVCMOS33 [get_ports uart_rxd]set_property PACKAGE_PIN M15 [get_ports swclk]
set_property IOSTANDARD LVCMOS33 [get_ports swclk]
set_property CLOCK_DEDICATED_ROUTE FALSE [get_nets swclk_IBUF]set_property PACKAGE_PIN R16 [get_ports swdio]
set_property IOSTANDARD LVCMOS33 [get_ports swdio]#set_property BITSTREAM.CONFIG.UNUSEDPIN Pulldown [current_design]
#set_property BITSTREAM.CONFIG.UNUSEDPIN Pullup [current_design]
set_property BITSTREAM.CONFIG.UNUSEDPIN Pullnone [current_design]set_property BITSTREAM.CONFIG.SPI_32BIT_ADDR NO [current_design]
set_property BITSTREAM.CONFIG.SPI_BUSWIDTH 4 [current_design]
set_property BITSTREAM.CONFIG.SPI_FALL_EDGE YES [current_design]
编译
-> Run Systhesis
-> Run Implementation
-> Generate Bitstream
下载
Open Hardware Manager -> Open Target -> Auto Connect -> 右键Hardware栏内的xc7a35t_0 -> 点击Program device
-> Bitstream file: E:/Workspaces/vivado2018/XC7A35TV12/cortex_m3/vivado/cortex_m3.runs/impl_1/top_hdl.bit
固化
Tools -> Generate Memory Configuration File ->
-> MCS
-> 128MB
-> File name: E:/Workspaces/vivado2018/XC7A35TV12/cortex_m3/vivado/cortex_m3.runs/impl_1/cortex_m3.mcs
-> Interface: SPIx4
-> 勾选 Load bitstream files
-> Bitfile: E:/Workspaces/vivado2018/XC7A35TV12/cortex_m3/vivado/cortex_m3.runs/impl_1/top_hdl.bit
请先手动删除
E:/Workspaces/vivado2018/XC7A35TV12/cortex_m3/vivado/cortex_m3.runs/impl_1
下的
led_test.mcs
led_test.prm
-> OK
-> Add Configuration Memory Device -> 输入n25q128-3.3v -> OK
烧写
-> Configuration file: E:/Workspaces/vivado2018/XC7A35TV12/cortex_m3/vivado/cortex_m3.runs/impl_1/cortex_m3.mcs
-> PRM file: E:/Workspaces/vivado2018/XC7A35TV12/cortex_m3/vivado/cortex_m3.runs/impl_1/cortex_m3.prm
-> OK
3. keil
3.1 安装器件库
直接双击Keil.V2M-MPS2_DSx_BSP.1.1.0.pack安装
3.2 新建工程
Project -> New uVision Project -> E:\Workspaces\vivado2018\XC7A35TV12\cortex_m3\mdk\ds_cm3
-> Select Device for Target -> ARM -> ARM Cortex M3 -> DS_CM3 -> OK
-> 勾选 CMSIS 下的 CORE
-> 勾选 Device 下的 Startup
-> OKFile -> New
添加以下内容
#include "DS_CM3.h"
#include "system_DS_CM3.h"int main(void)
{while(1){}
}
保存到
E:\Workspaces\vivado2018\XC7A35TV12\cortex_m3\mdk\src\main.c
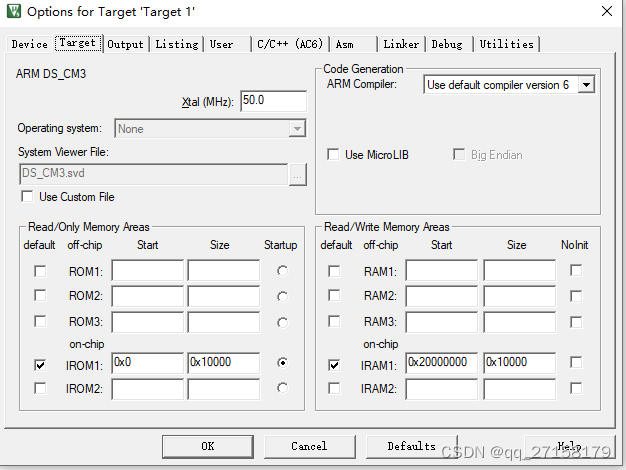
设置RAM和ROM地址
在工程选项中设置片上ITCM的起始地址0x0、大小64K,片上DTCM起始地址0x20000000、大小64K:
Options for Target -> Target ->
-> IROM1: Start: 0x0, Size: 0x10000,
-> IRAM1: Start: 0x20000000, Size: 0x10000,
3.3 修改main.c
main.c直接使用mcu designstart cortex-m3\cortex_m3_on_xc7a100t-main\mdk_prj\application\main.c
3.4 Flash编程算法生成
文件浏览器 打开D:\Keil\mdk5\ARM\Flash
把
D:\Keil\mdk5\ARM\Flash\_Template
拷贝到
D:\Keil\mdk5\ARM\Flash\DS_CM3
双击 D:\Keil\mdk5\ARM\Flash\DS_CM3\NewDevice.uvprojx打开FlashDev.c
把里面的
struct FlashDevice const FlashDevice = {FLASH_DRV_VERS, // Driver Version, do not modify!"New Device 256kB Flash", // Device Name ONCHIP, // Device Type0x00000000, // Device Start Address0x00040000, // Device Size in Bytes (256kB)1024, // Programming Page Size0, // Reserved, must be 00xFF, // Initial Content of Erased Memory100, // Program Page Timeout 100 mSec3000, // Erase Sector Timeout 3000 mSec// Specify Size and Address of Sectors0x002000, 0x000000, // Sector Size 8kB (8 Sectors)0x010000, 0x010000, // Sector Size 64kB (2 Sectors) 0x002000, 0x030000, // Sector Size 8kB (8 Sectors)SECTOR_END
};
修改为:
struct FlashDevice const FlashDevice = {FLASH_DRV_VERS, // Driver Version, do not modify!"MyCM3onFPGA", // Device Name ONCHIP, // Device Type0x00000000, // Device Start Address0x00010000, // 修改为64KB1024, // Programming Page Size0, // Reserved, must be 00xFF, // Initial Content of Erased Memory100, // Program Page Timeout 100 mSec3000, // Erase Sector Timeout 3000 mSec// Specify Size and Address of Sectors0x010000, 0x000000, // 只有一个扇区,起始地址为0SECTOR_END
};编译,生成D:\Keil\mdk5\ARM\Flash\DS_CM3\NewDevice.FLM
把这个文件拷贝到
D:\Keil\mdk5\ARM\Flash\DS_CM3.FLM
回到ds_cm3.uvprojx工程
-> 右键 Target 1 -> Options for target -> Debug -> Use J-LINK -> Settings ->
-> Flash Download -> Add -> MyCM3onFPGA -> Add
3.5 下载测试
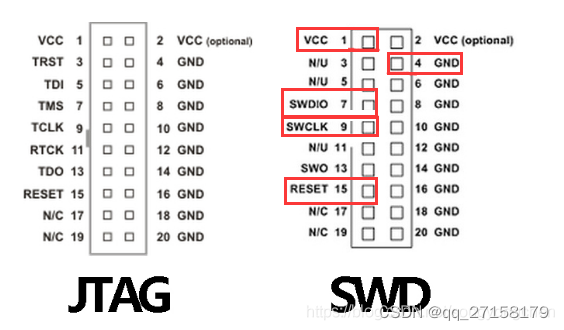
下载时使用jlink的swdio、swclk、gnd连接fpga板卡上的对应三根线即可。
下载时通过keil的 Flash -> Download开始下载。
有时候下载完需要按下复位才可以执行。
参考
[1]在FPGA上搭建Cortex-m3软核,https://blog.csdn.net/m0_50735735/article/details/124253664
[2]手把手教你在FPGA上运行一个ARM Cortex-M3软核,https://zhuanlan.zhihu.com/p/489213515
[3]ARM Cortex M3 verilog源代码 Cortex-M3 DesignStart评估,https://www.amobbs.com/thread-5756149-1-1.html
[4]如何用FPGA实现一个ARM Cortex-M3软核,https://blog.csdn.net/whik1194/article/details/123784346
相关文章:
MCU软核 3. Xilinx Artix7上运行cortex-m3软核
0. 环境 - win10 vivado 2018.3 keil mdk - jlink - XC7A35TV12 1. 下载资料 https://keilpack.azureedge.net/pack/Keil.V2M-MPS2_DSx_BSP.1.1.0.pack https://gitee.com/whik/cortex_m3_on_xc7a100t 2. vivado 2018 Create Project -> Next -> -> Project n…...
基于SpringbootShiro实现的CAS单点登录
概述 单点登录(Single Sign On,SSO)是一种登录管理机制,主要用于多系统集成,即在多个系统中,用户只需要到一个中央服务器登录一次即可访问这些系统中的任何一个,无须多次登录。常见的例子就是,…...
SocketTool V4.0 使用说明
TCP/UDP Socket 调 试 工 具 提 供 了 TCP Server,TCP Client,UDP Server,UDP Client,UDP Group 五种 Socket 调试方案。 下面是一份简要的使用流程: TCP 通信测试: 1) 创建 TCP Server 选中左方的 TCP Server, 然后点击 ”创建 ”按钮,软件弹…...

Jenkins结合allure生成测试报告
前言: 我们在做自动化测试的过程中最重要的肯定是报告的输出啦,最近几年allure可以说是最最主流报告展示工具啦。 一、服务端安装allure 在安装Jenkins的机器 安装allure,我们在Jenkins上能跑动前提是在对应服务器上代码能正常运行…...
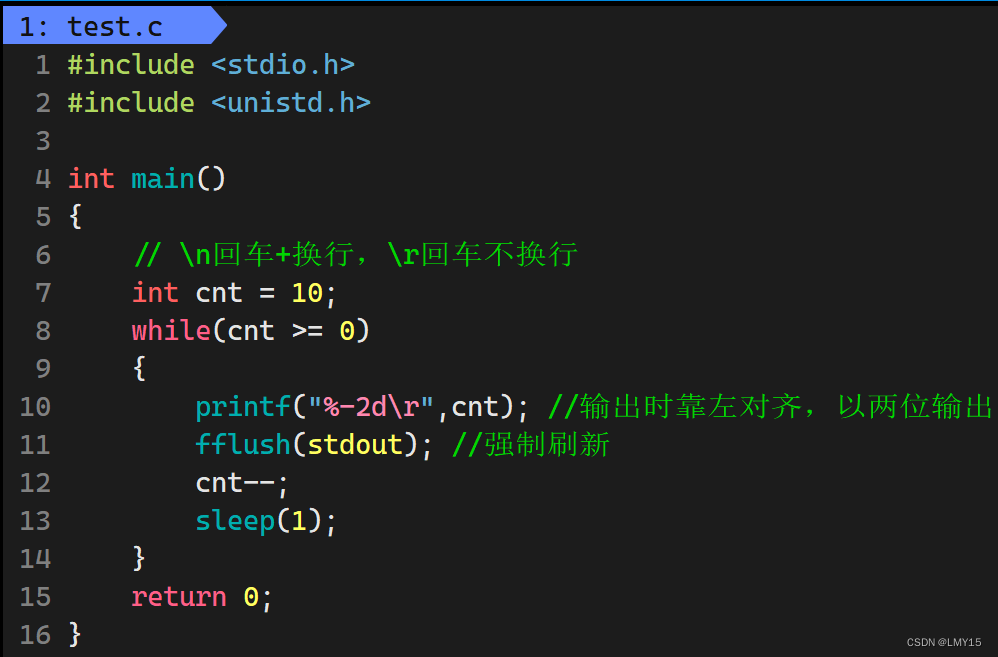
【Linux】缓冲区/回车换行
1、缓冲区 C程序默认有输出缓冲区。数据输出时,被及时看到,是立马刷新了;如果没被看到,是被暂存在数据缓冲区中。fflush(stdout); 【强制刷新】\n【行刷新,也是一种刷新方式】 2、回车换行 \n【回车换行】输入完一行内…...

Java手写插入排序和算法案例拓展
1. Java手写插入排序和算法案例拓展 1.1 算法思维导图 #mermaid-svg-jIZ3LAdg1NLcOvaM {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-jIZ3LAdg1NLcOvaM .error-icon{fill:#552222;}#mermaid-svg-jIZ3LAdg1NLcOvaM…...

Python Opencv实践 - 视频文件操作
参考资料: 视频处理VideoCapture类---OpenCV-Python开发指南(38)_python opencv videocapture_李元静的博客-CSDN博客 OpenCV VideoCapture.get()参数详解 - 简书FOURCC四字符码对照表_4fvcc_Kellybook的博客-CSDN博客 import cv2 as cv im…...
HCS 中的一些概念(二)
一、Service OM 1、首页(资源状态) 2、服务列表 计算资源:计算资源又分为可用分区(AZ)、规格和虚拟机组,可在此处创建虚拟机、虚拟机组、主机组和规格 网络资源:网络资源又分为物理网络…...
Scanner类用法(学习笔记)
Scanner类用法(学习笔记,后续会补充) 1.next()用法 package com.yushifu.scanner; import java.util.Scanner;//util java工具包 //Scanner类(获取用户的输入) Scanner s new Scanner&#…...

idea2021.1.3版本双击启动,没反应
今天打开电脑,点开idea,界面悬在这里,几秒然后就是没了。然后就一直打不开idea了。 然后又是卸载重装,又是删除缓存文件。我把电脑关于idea的文件全都删除了 。重新安装后(首次运行倒是可以打开,但是关掉id…...

MC-4/11/01/400 ELAU 软件允许用户完全访问相机设置
MC-4/11/01/400 ELAU 软件允许用户完全访问相机设置 一个完整的Sentinel模具保护解决方案包括一到四台冲击式摄像机、专用红外LED照明和镜头、Sentinel软件以及所有与模压机连接的必要互连组件。摄像机支架基于磁性,可快速、安全、灵活地部署。此外,一个…...

Error contacting service. It is probably not running.问题解决
一 问题描述 Error contacting service. It is probably not running. 查看zookeeper 目录下数据目录下的zookeeper.out 如果你没找到这个目录那么 OK 你的问题就是 zoo.cfg 文件中数据目录设置错误 zookeeper.out下报错 ERROR [main:QuorumPeerMain86] - Invalid config,…...

01_网络编程_传统IO
网络编程 1.什么是网络编程 在网络通信协议下,不同计算机上运行的程序,进行的数据传输。 如果想把一个计算的结果,或者是电脑上的文件通过网络传递给你的朋友,就需要用到网络编程。 在实际生活中,网络通信无处不在…...

vue 检查指定路由是否存在
今天路由跳转报错了 RangeError: Maximum call stack size exceeded 但显然 我的代码只有一个简单的路由跳转 并没有很大的的堆栈数据操作 所以 我就联想到了 会不会是因为路由不存在 我们可以通过 console.log(this.$router.options.routes)输出整个路由对象类看一下 或者…...

自动化办公更简单了:新版python-office,有哪些更新?
#职场经验谈# 大家好,这里是程序员晚枫,小破站/小红薯都叫这个名。 去年4月开源了一个Python自动化办公项目:python-office,GitHub和Gitee都能看到。1行代码实现复杂的自动化办公任务,帮助不懂代码的小白,…...

windows flask服务卡死的问题
windows flask服务卡死的问题 最近的工作中,需要用python写一个flask服务,供C端调用,但是偶尔服务会卡住,只接收数据但不进行处理,不过CtrlC后又可以继续运行。 查看了网上的一些解决方法,但似乎都没有什…...

项目上线部署--》服务器部署流程(一)
目录 🌟准备工作 服务器购买 域名购买 域名解析(配置 DNS) 🌟服务器环境搭建 配置服务器 安装 CentOS 开发人员相关包 编辑 配置免密登陆 🌟写在最后 🌟准备工作 服务器购买 国内服务器&#x…...
Python:函数调用的实参
相关阅读 Python专栏https://blog.csdn.net/weixin_45791458/category_12403403.html 调用就是附带可能为空的一系列参数来执行一个可调用对象 (例如函数),它的语法的BNF范式如下所示,有关BNF范式的规则,可以参考之前…...

174. 地下城游戏 -- 动规
174. 地下城游戏 class CalculateMinimumHP:"""174. 地下城游戏https://leetcode.cn/problems/dungeon-game/"""def solution(self, dungeon: List[List[int]]) -> int:# 我们想计算左上⻆到右下⻆所需的最⼩⽣命值m, n len(dungeon), len(d…...
js实现websocket服务端和客户端
天行健,君子以自强不息;地势坤,君子以厚德载物。 每个人都有惰性,但不断学习是好好生活的根本,共勉! 文章均为学习整理笔记,分享记录为主,如有错误请指正,共同学习进步。…...

【杂谈】-递归进化:人工智能的自我改进与监管挑战
递归进化:人工智能的自我改进与监管挑战 文章目录 递归进化:人工智能的自我改进与监管挑战1、自我改进型人工智能的崛起2、人工智能如何挑战人类监管?3、确保人工智能受控的策略4、人类在人工智能发展中的角色5、平衡自主性与控制力6、总结与…...

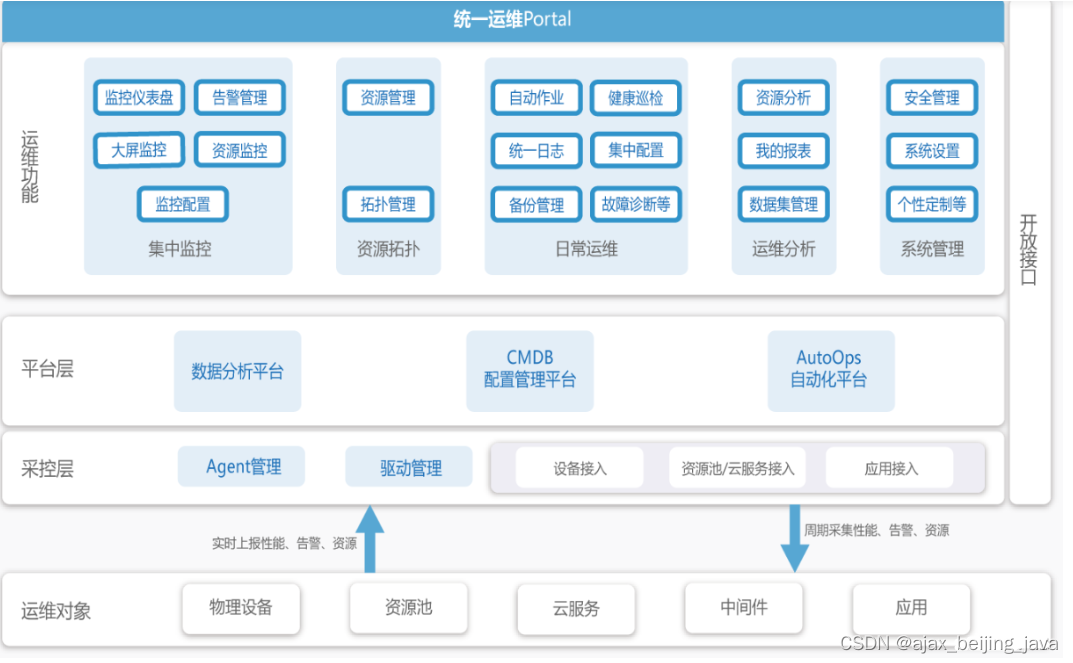
PPT|230页| 制造集团企业供应链端到端的数字化解决方案:从需求到结算的全链路业务闭环构建
制造业采购供应链管理是企业运营的核心环节,供应链协同管理在供应链上下游企业之间建立紧密的合作关系,通过信息共享、资源整合、业务协同等方式,实现供应链的全面管理和优化,提高供应链的效率和透明度,降低供应链的成…...
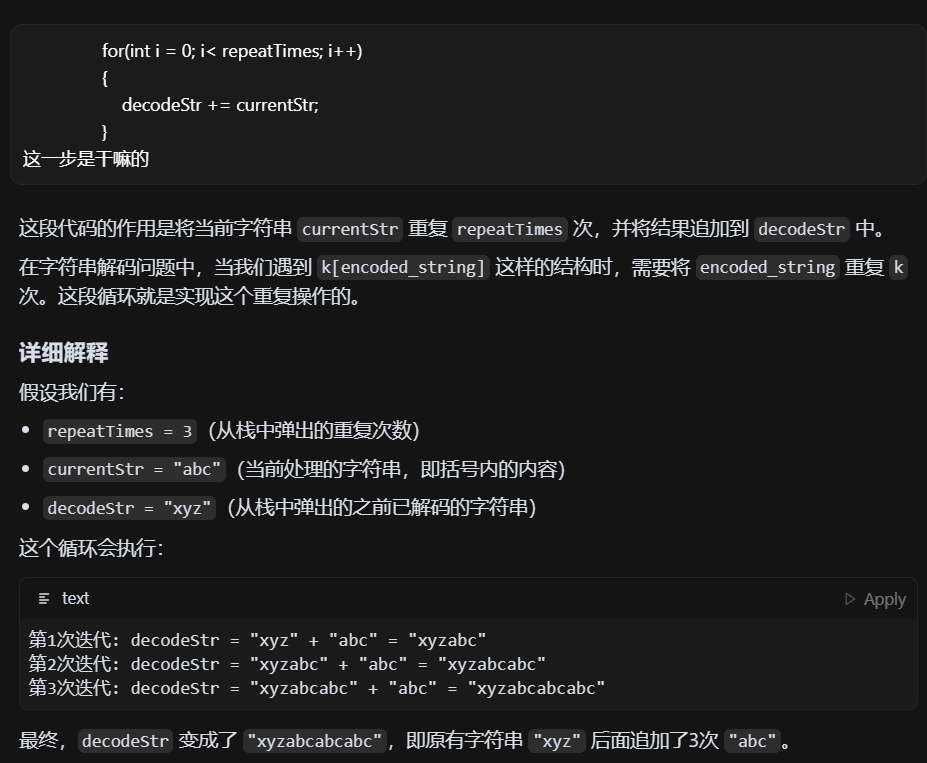
LeetCode - 394. 字符串解码
题目 394. 字符串解码 - 力扣(LeetCode) 思路 使用两个栈:一个存储重复次数,一个存储字符串 遍历输入字符串: 数字处理:遇到数字时,累积计算重复次数左括号处理:保存当前状态&a…...

Ascend NPU上适配Step-Audio模型
1 概述 1.1 简述 Step-Audio 是业界首个集语音理解与生成控制一体化的产品级开源实时语音对话系统,支持多语言对话(如 中文,英文,日语),语音情感(如 开心,悲伤)&#x…...

Python如何给视频添加音频和字幕
在Python中,给视频添加音频和字幕可以使用电影文件处理库MoviePy和字幕处理库Subtitles。下面将详细介绍如何使用这些库来实现视频的音频和字幕添加,包括必要的代码示例和详细解释。 环境准备 在开始之前,需要安装以下Python库:…...
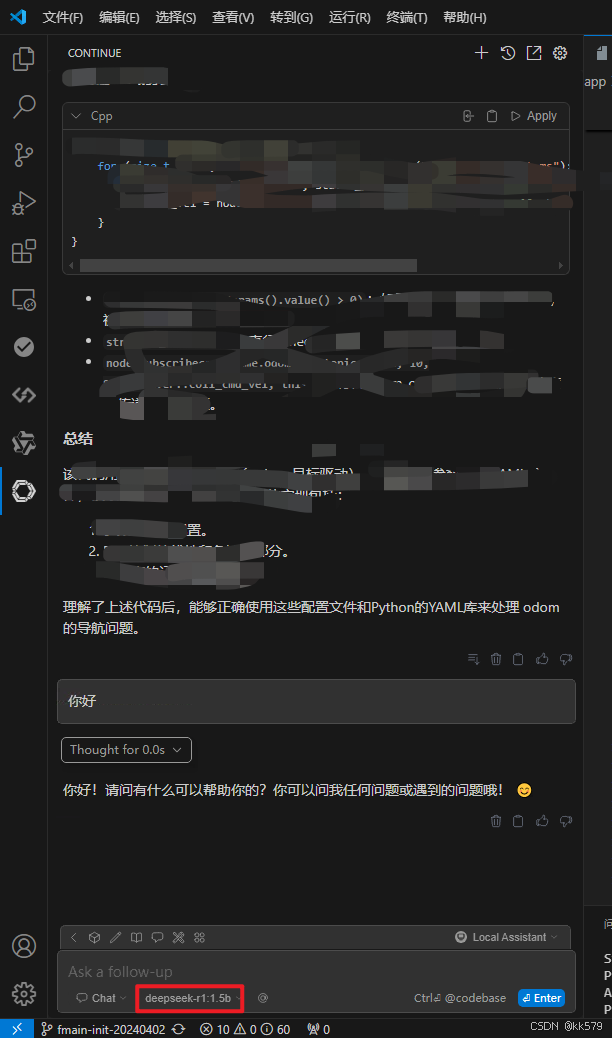
保姆级教程:在无网络无显卡的Windows电脑的vscode本地部署deepseek
文章目录 1 前言2 部署流程2.1 准备工作2.2 Ollama2.2.1 使用有网络的电脑下载Ollama2.2.2 安装Ollama(有网络的电脑)2.2.3 安装Ollama(无网络的电脑)2.2.4 安装验证2.2.5 修改大模型安装位置2.2.6 下载Deepseek模型 2.3 将deepse…...
深度学习水论文:mamba+图像增强
🧀当前视觉领域对高效长序列建模需求激增,对Mamba图像增强这方向的研究自然也逐渐火热。原因在于其高效长程建模,以及动态计算优势,在图像质量提升和细节恢复方面有难以替代的作用。 🧀因此短时间内,就有不…...
【Linux】自动化构建-Make/Makefile
前言 上文我们讲到了Linux中的编译器gcc/g 【Linux】编译器gcc/g及其库的详细介绍-CSDN博客 本来我们将一个对于编译来说很重要的工具:make/makfile 1.背景 在一个工程中源文件不计其数,其按类型、功能、模块分别放在若干个目录中,mak…...
ZYNQ学习记录FPGA(一)ZYNQ简介
一、知识准备 1.一些术语,缩写和概念: 1)ZYNQ全称:ZYNQ7000 All Pgrammable SoC 2)SoC:system on chips(片上系统),对比集成电路的SoB(system on board) 3)ARM:处理器…...

多元隐函数 偏导公式
我们来推导隐函数 z z ( x , y ) z z(x, y) zz(x,y) 的偏导公式,给定一个隐函数关系: F ( x , y , z ( x , y ) ) 0 F(x, y, z(x, y)) 0 F(x,y,z(x,y))0 🧠 目标: 求 ∂ z ∂ x \frac{\partial z}{\partial x} ∂x∂z、 …...